Изобретение относится к военной технике и может быть использовано для защиты объектов от поражения высокоскоростными летательными аппаратами, в том числе от крылатых ракет и самолетов.
Процесс создания боеприпасов, способных за счет высокой (гиперзвуковой) скорости движения оставаться неуязвимыми, для средств противовоздушной обороны в последние годы идет очень активно. В качестве примеров появления таких боеприпасов в ряде развитых стран можно привести гиперзвуковые летательные аппараты, создаваемые в Китае (DZ-ZF), в США (Х-51А Waverider) и другие.
В связи с этим, проблема разработки средств поражения таких летательных аппаратов сегодня является актуальной.
Обнаружение и поражение высокоскоростных летательных аппаратов является сложной технической задачей. При их гиперзвуковой скорости полета и маневрирования сегодняшние средства обнаружения, слежения и наведения противоракет не успевают выполнить задачу по уничтожению этих целей. Как известно, современные системы ПВО в своем арсенале используют различные радары. Поражение летательного аппарата в этих случаях осуществляется за счет того, что с помощью радара определяются основные элементы траектории летательного аппарата, который при входе в плотные слои атмосферы падает на Землю по баллистической траектории, и направлении противоракеты в вычисленную точку этой траектории. Появление в последнее время гиперзвуковых летательных аппаратов, способных приближаться к Земле по траектории отличной от баллистической, создает значительные трудности в выборе точки встречи этого аппарата противоракетой, даже имеющей боевую часть с ядерным зарядом.
Настоящее изобретение представляет собой техническое решение по созданию системы борьбы с гиперзвуковыми летательными аппаратами, в том числе, способными нести ядерное оружие, и способными приближаться к Земле по траекториям, отличным от классической баллистической. Суть предлагаемого технического решения заключается в создании автоматизированной системы обнаружения и поражения таких летательных аппаратов на высотах более 10 км от цели, в том числе аппаратов, которые в полете изменяют свою траекторию, например, приближаются к земле по винтовой траектории переменного радиуса. На этих расстояниях, даже срабатывание боевой части летательного аппарата после воздействия на него средством поражения, значительного поражающего действия не создает. В основу принципов построения такой системы положены исследования автора, направленные на обнаружение сверхзвуковых летательных аппаратов по их электромагнитному излучению, сопровождающему процессы образования ударных волн в зонах движения сверхзвуковых аппаратов (Кузнецов Н.С. Предложения по повышению эффективности неконтактных датчиков цели ракет // Боеприпасы, 2018 г., №3). Такие средства обнаружения летательных аппаратов являются пассивными. Использование пассивных схем обнаружения сверхзвуковых и гиперзвуковых летательных аппаратов позволяет оставаться им незаметными для средств обнаружения и разведки, установленным на летательных аппаратах.
Предлагаемая система обнаружения и применяемые средства поражения работает в автоматическом режиме по заранее отработанным алгоритмам.
В связи с тем, что гиперзвуковые летательные аппараты при подходе к цели имеют высокую скорость (примерно 5-6 км/с), то для их обнаружения и уничтожения необходимы системы, способные обнаружить и уничтожить цель за единицы мс. Такое быстродействие могут обеспечивать только автономные системы, работающие в ждущем режиме, и работающие по заданному алгоритму.
Самым главным в данной системе является устройство для поражения цели, способное воздействовать на цель через единицы микросекунд после подачи команды на поражение. На сегодняшний день самой отработанной системой поражения с такими свойствами является система, использующая мощные импульсные лазеры. Скорость передачи импульса энергии от такой системы к цели близка к скорости света, что позволяет выполнять работу на поражение цели без упреждения (без учета скорости движения летательного аппарата). И такие системы уже есть, как в России, так и за рубежом. Поэтому в данном техническом решении в качестве быстродействующего устройства поражения предлагается использовать именно такой лазер. В качестве аналогов таких разработок можно привести разработки, выполненные в этой области специалистами США. Первое испытание боевого лазера воздушного базирования AL-1 было проведено 13 ноября 2004 года на авиабазе Эдварде (Калифорния). Американцы начали работы по созданию боевого лазера воздушного базирования еще в 1980-х гг. в рамках программы СОИ (Стратегическая оборонная инициатива - Strategic Defense Initiative). В 1983 году были проведены испытания по применению такого лазера против ракет класса «воздух-воздух». В дальнейшем усилия были сосредоточены на разработке более мощных наземных лазеров, которые позволяли бы уничтожать летящие баллистические ракеты. 11 февраля 2010 года продолжение испытаний. Американское Агентство противоракетной обороны провело испытания боевого лазера в полете по поражению баллистических ракет. Была осуществлена стрельба лазерной системы по двум целям, имитирующим баллистические ракеты на твердом и жидком топливе на разгонном участке траектории. Был произведен выстрел боевым лазером мегаваттного класса на полную мощность, разогревший ракету до критической температуры и вызвавший необратимое нарушение ее конструкции.
Вторым важным элементом в такой системе является техническое решение по быстрому определению координат высокоскоростной цели. В данном техническом решении для выполнения этой задачи предлагается использовать систему, построенную на непрерывном приеме электромагнитного излучения из определенной зоны воздушного пространства с помощью ряда разнесенных в пространстве чувствительных приемников, работающих в диапазоне длин волн от 0,3 до 5 мкм. Данный диапазон длин волн выбран, исходя из того, что при высокоскоростном движении в воздушном пространстве Земли гиперзвуковой летательный аппарат создает вокруг себя тепловое поле от сотен до нескольких тысяч градусов. В соответствии с известным законом теплового излучения длина волны λm, на которую приходится максимум излучательной способности абсолютно черного тела, обратно пропорциональна его абсолютной температуре Т. Этот закон можно записать в виде:

где b=2,898⋅10-3 м ⋅ K - постоянная Вина.
Выбранный диапазон длин волн для фиксации гиперзвуковых летательных аппаратов определяется расчетом в соответствии с соотношением (1). Такое тепловое поле в виде электромагнитных волн различной длины, распространяется в пространстве со скоростью света и практически мгновенно доходит до средств приема, расположенных вблизи от поверхности Земли. Фактически зону движения гиперзвукового летательного аппарата будет окружать поле, излучающее одновременно множество электромагнитных волн различной длины. Эти волны, накладываясь друг на друга, будут создавать поле, выделение в котором несущей волны, по которой можно судить о фазе волны, практически невозможно. То есть, применение, в этом случае, фазированных антенных устройств для определения координат летательного аппарата по его электромагнитному излучению представляет собой очень сложную техническую задачу. В связи с этим для регистрации параметров излучения летательного аппарата в предлагаемом техническом решении используются быстродействующие фотодиоды, которые работают в широком диапазоне длин волн, и позволяют проводить оценку излучательной способности тела, например, по амплитуде серии сигналов, принятых за короткий промежуток времени, одновременно всеми приемниками системы. Большой выбор таких фотодиодов предлагает компания «Иоффе-ЛЕД» (г. Санкт-Петербург), которая разрабатывает и производит диодные источники (светодиоды) и приемники излучения (фотодиоды) на основе гетероструктур из твердых растворов арсенида индия.
Следующей важной системой в таком техническом решении является система, способная за короткие промежутки времени обеспечить наведение боевой части с высокой точностью на цель. При этом промежутки времени составляют единицы микросекунд. В настоящем техническом решении для этих целей предлагается использовать системы, построенные на комбинации электро- и пьезоактуаторов. Такие устройства позволяют с высокой скоростью и точностью обеспечивать наведение оси боевого лазера на цель.
Комбинация вышеперечисленных устройств, управляемая единым устройством управления, позволяет непрерывно осуществлять мониторинг воздушного пространства на десятки километров от места установки системы на предмет появления высокоскоростных целей, сопровождающихся излучением электромагнитных волн в диапазоне длин от 0,3 до 5 и более мкм, быстрого (в реальном масштабе времени) определения координат этих целей, и выдачи необходимых команд на наведение боевого лазера на цель, и импульсного излучения.
Предлагаемый способ поражения гиперзвуковых летательных аппаратов заключается в том, что с помощью локационных средств обнаруживают летательный аппарат, с помощью вычислительного устройства определяют координаты его движения, и направляют средство поражения в точку столкновения с этим летательным аппаратом. При этом гиперзвуковой летательный аппарат обнаруживают с помощью, как минимум четырех пассивных приемников электромагнитных волн, работающих в диапазоне длин волн от 0,3 до 5 микрометров, причем, как минимум, три приемника располагаются в горизонтальной плоскости по окружности радиусом R с центром в точке О, а, как минимум, один приемник располагается на высоте h от этой горизонтальной плоскости на вертикальной оси, проходящей через центр в точке О. В этом же центре О устанавливают на поворотной платформе средство поражения летательных аппаратов, представляющее собой мощный импульсный лазер, рабочая ось которого при повороте платформы проходит через центр в точке О. Сама поворотная платформа обеспечивает импульсный наклон оси лазера на угол а в вертикальной плоскости. Эта вертикальная плоскость проходит через точку О и точку В, расположенную в горизонтальной плоскости на участке между парой приемников электромагнитных волн с максимальными значениями амплитуды принятых сигналов в каждый момент времени, по сравнению с амплитудами на других приемниках, расположенных в горизонтальной плоскости, на расстоянии равном величине k1 , где - расстояние между приемниками, а величина k1 равна отношению амплитуд сигналов на этих приемниках, причем в знаменателе этого отношения находится величина максимальной амплитуды. Угол α в этой вертикальной плоскости образуется осью лазера в момент пересечения этой осью точки D на прямой от приемника, расположенного на вертикальной оси, с точкой В, причем расстояние от точки В до точки D определяется соотношением BD=k2p, где р - расстояние от приемника на высоте h до точки В, k2 - отношение амплитуд сигналов, условно принятых, в точке В, и на приемнике на высоте h. Амплитуда сигналов, условно принятых, в точке В определяется расчетом, и равна произведению амплитуды с максимальным значением сигналов на приемнике в горизонтальной плоскости, на коэффициент k1. После выполнения расчетов, в каждый момент реального времени, с помощью вычислительного устройства подают команду на импульсный поворот платформы с лазером на вычисленный угол α в выбранной вертикальной плоскости, а также выдают команду на излучение мощного импульса энергии, которым поражают гиперзвуковой летательный аппарат.
, где - расстояние между приемниками, а величина k1 равна отношению амплитуд сигналов на этих приемниках, причем в знаменателе этого отношения находится величина максимальной амплитуды. Угол α в этой вертикальной плоскости образуется осью лазера в момент пересечения этой осью точки D на прямой от приемника, расположенного на вертикальной оси, с точкой В, причем расстояние от точки В до точки D определяется соотношением BD=k2p, где р - расстояние от приемника на высоте h до точки В, k2 - отношение амплитуд сигналов, условно принятых, в точке В, и на приемнике на высоте h. Амплитуда сигналов, условно принятых, в точке В определяется расчетом, и равна произведению амплитуды с максимальным значением сигналов на приемнике в горизонтальной плоскости, на коэффициент k1. После выполнения расчетов, в каждый момент реального времени, с помощью вычислительного устройства подают команду на импульсный поворот платформы с лазером на вычисленный угол α в выбранной вертикальной плоскости, а также выдают команду на излучение мощного импульса энергии, которым поражают гиперзвуковой летательный аппарат.
Предлагаемое техническое решение поясняется рисунками, приведенными на фиг. 1 и фиг. 2.
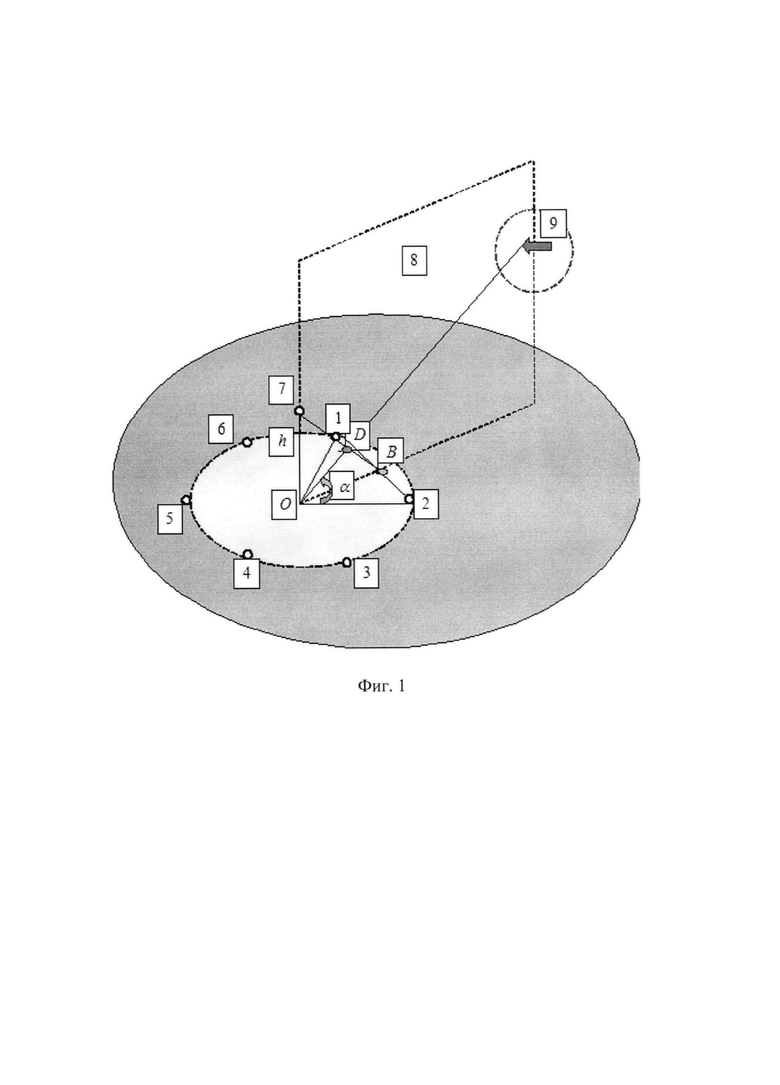
Фиг. 1. Схема определения координат гиперзвукового летательного аппарата:
1 - 7 - пассивные приемники электромагнитных волн;
8 - вертикальная плоскость, в которой расположены средства поражения и летательный аппарат;
9 - гиперзвуковой летательный аппарат;
O - центр установки лазера;
h - высота установки приемника по вертикальной оси;
α - угол поворота оси лазера в вертикальной плоскости;
В - точка пересечения вертикальной плоскости с линией, соединяющей места установки приемников 1 и 2;
D - точка пересечения оси лазера с прямой, соединяющей место установки приемника 7 с точкой В.
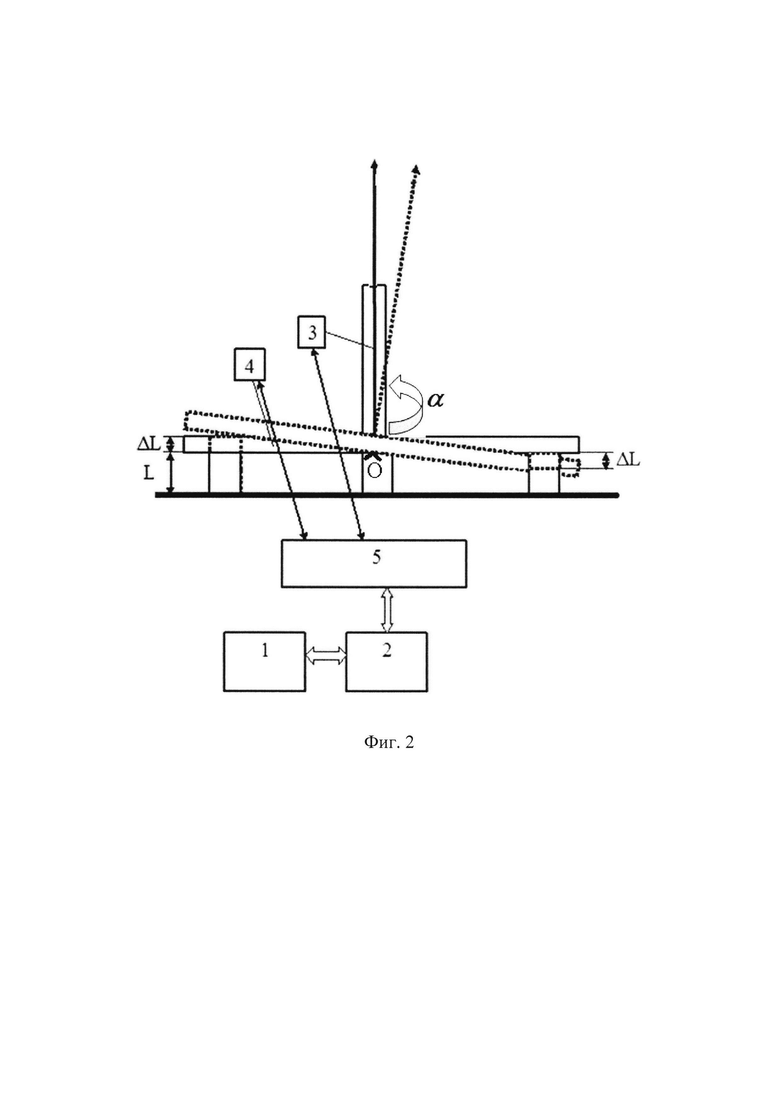
Фиг. 2. Схема построения системы для поражения гиперзвуковых летательных аппаратов на поворотной платформе:
1 - устройство обнаружения гиперзвукового летательного аппарата;
2 - устройство определения координат;
3 - устройство поражения цели (мощный импульсный лазер);
4 - устройство наведения;
5 - устройство вычислительное;
О - центр поворотной платформы, в котором установлен лазер;
α - угол наклона оси лазера в момент излучения.
Техническое решение по определению координат летательного аппарата основано на том, что в процессе полета из зоны нахождения этого аппарата происходит непрерывное излучение электромагнитных волн. Эти волны распространяются в воздушном пространстве, затухая в соответствии с установленными закономерностями. Например, изменение амплитуды сигналов Ai такого излучения можно описать с помощью известного соотношения:

где А0 - амплитуда сигналов в зоне излучения, δ - коэффициент затухания, Xi - расстояние от зоны излучения до зоны приема.
При регистрации такого излучения на приемники, разнесенные в пространстве, обеспечивая разность расстояний от места излучения до места приема, представляется возможность по изменению амплитуды на разных приемниках оценить направление излучения. А именно: отношение амплитуд на разных приемниках дает значение отношений расстояний от источника до приемника. В связи с этим, в настоящем техническом решении для определения направления вертикальной плоскости по отношению к равноудаленному центру от приемников, расположенных в горизонтальной плоскости, используется отношение амплитуд с двух соседних приемников, на которых значения этих амплитуд по сравнению с остальными максимальны. Для примера, приведенного на фиг. 1 положение этой вертикальной плоскости определяется положением точки В на прямой, соединяющей места установки приемников 1 и 2. Использование приемников 1 и 2 обусловлено, тем, что расстояния от них до излучателя (летательного аппарата) наименьшие по сравнению с другими приемниками (3-6). Соотношение для определения положения точки В на прямой 1-2 (фиг. 1) будет иметь вид:

где  - расстояние между приемниками (1-2), а величина
- расстояние между приемниками (1-2), а величина

где А2 и А1 амплитуды сигналов за время Δt на приемниках 2 и 1 соответственно. Величина Δt составляет несколько мкс.
Аналогично вычисляется положение точки D на пересечении прямой, исходящей из точки О в направлении цели и прямой, соединяющей точку В с местом расположения приемника на вертикальной оси (точка 7 на фиг. 1). А именно, отрезок BD будет определяться соотношением:

где р - расстояние от приемника на высоте h до точки В, k2 - отношение амплитуд сигналов, условно принятых, в точке В и на приемнике на высоте h (точка 7 на фиг. 1). В свою очередь, амплитуда сигналов, условно принятых, в точке В определяется расчетом, и равна произведению амплитуды с максимальным значением сигналов на приемнике 1 в горизонтальной плоскости, на коэффициент k1.
Для защиты системы от ложных срабатываний приемников от воздействия солнечного излучения (диапазон излучения Солнца входит в диапазон работы приемников) они включены по дифференциальной схеме, например, приемник 1 с приемником 4, а приемник 2 с приемником 5 (см. фиг. 1). Кроме того, приемники, защищены экранами от воздействия локальных источников теплового излучения, расположенных на поверхности Земли и на малых высотах от Земли.
Таким образом, с помощью простых расчетов, приведенных выше, на основе данных об амплитудах потока сигналов, принятых на различные приемники, при известных расстояниях между этими приемниками, представляется возможность определять положение вертикальной плоскости, в которой в данный промежуток времени Δti находится цель, а также определять угол возвышения а относительно горизонтальной плоскости в точке О. Эти данные позволяют с высокой точностью наводить ось лазера на цель. В данном случае нет необходимости определять расстояние до цели. Цель за промежуток времени Δt будет находиться на линии, совпадающей с осью лазера.
Результаты вычислений (положения вертикальной плоскости и оси лазера) с помощью вычислительного устройства по заданному алгоритму передаются в качестве команд управления на поворотную платформу, на которой установлен боевой лазер. Лазер установлен на платформе жестко. Положение оси лазера определяется углом поворота платформы в заданной плоскости. Схема поворота платформы с лазером приведена на рисунке фиг. 2.
В связи с тем, что поворот платформы должен осуществляться за десятки микросекунд, в качестве устройств для поворота используются быстродействующие электро- и пьзоактуаторы. Причем, при обнаружении цели осуществляется грубая наводка путем использования приводов, построенных на электроактуаторах. Электроактуаторы выполняют перемещение платформы за единицы мс. Цель за то время проходит всего лишь несколько метров. На конечном этапе наводки используются импульсные пьезоактуаторы, которые позволяют выполнить поворот платформы за единицы мкс. В этом случае наводка на цель составляет десятки сантиметров на расстояниях до 10 км.
В основе конструкции электроактуатора лежит телескопический принцип устройства. Из корпуса выдвигается шток и задвигается обратно, за счет того, что внутри корпуса установлен вращающийся винт, по которому перемещается гайка, соединенная со штоком. Вращение винта обеспечивается двигателем через редуктор, муфту или ременную передачу. Усиленный корпус имеет высокую жесткость для обеспечения целостности конструкции.
Технические характеристики ряда актуаторов приведены ниже (http://www.aktuator.ru/catalogues.shtml):
Пьезоактуаторы (пьезоактюаторы) - это специальные сверхпрецизионные короткоходные линейные электроприводы. Они преобразуют электрическое напряжение в небольшое, но крайне точно контролируемое линейное перемещение с высоким развиваемым усилием. В основе принципа их действия лежит обратный пьезоэлектрический эффект, то есть механическая деформация кристалла при воздействии на него электрического поля. При этом осуществляется возвратно-поступательное движение или другие его виды. Наиболее распространенным типом пьезоэлектрических актюаторов является пакетный. Внутри его корпуса находится пакет в виде цилиндрического столбца, набранный из большого количества плоских пьезокерамических элементов, чередующихся с пластинами-электродами. При подаче напряжения (сотни В) высота каждого элемента и, следовательно, всей стопки немного изменяется, примерно на 0,1…0,2%. Таким образом, длину хода пакетного прецизионного пьезоактуатора можно оценить на уровне 1 мкм или чуть больше на 1 мм его высоты. Развиваемое усилие зависит от площади поперечного сечения столбца пьезокерамических элементов и составляет 5-10 кН на 1 см2. Для увеличения хода пьезоатуатора используются различные рычажные механизмы. Главным преимуществом пьезоэлектрических актуаторов является беспрецедентная точность позиционирования - сотые и даже тысячные доли нанометра. Кроме того, они надежны, долговечны, обладают отличным быстродействием, развивают высокие ускорения и сочетают большое развиваемое усилие с компактностью. Очень важно и то, что пьезоатуаторы не имеют вращающихся и скользящих частей, не требуют смазывания и обслуживания, способны работать при низких температурах и в вакууме. Пьезоатуаторы могут достигать своего номинального перемещения приблизительно за 1/3 периода резонансной частоты, которая для большинства высоковольтных актуаторов составляет примерно 40 кГц, т.е. время перемещения с помощью таких устройств составляет примерно 10 мкс. Этого времени вполне достаточно для точной наводки лазера и импульсного излучения. На фиг. 2 такие перемещения платформы представлены величинами ΔL, которые задаются вычислительным устройством в каждый конкретный момент времени для каждой опоры платформы.
Время излучения импульсных лазеров составляет единицы мкс.
Таким образом, приведенные данные показывают, что с помощью известных технических средств предлагаемый способ поражения гиперзвуковых летательных аппаратов может быть реализован.
Изложенные сведения о заявленном изобретении, охарактеризованном в независимом пункте формулы, свидетельствуют о возможности его осуществления с помощью описанных в заявке и известных средств и методов. Следовательно, заявленный способ соответствует условию промышленной применимости.
Изобретение относится к военной технике, а более конкретно к способу поражения гиперзвуковых летательных аппаратов (ГЛА). Способ поражения ГЛА заключается в том, что с помощью локационных средств обнаруживают ГЛА, с помощью вычислительного устройства определяют координаты его движения и направляют средство поражения в точку столкновения с этим ГЛА. При этом ГЛА обнаруживают с помощью как минимум четырех пассивных приемников электромагнитных волн. Средство поражения устанавливают на поворотной платформе. Платформа обеспечивает импульсный наклон оси лазера на угол α в вертикальной плоскости. После выполнения расчетов, в каждый момент реального времени, с помощью вычислительного устройства подают команду на импульсный поворот платформы с лазером на вычисленный угол α в выбранной вертикальной плоскости, а также выдают команду на излучение мощного импульса энергии, которым поражают ГЛА. Достигается возможность поражения ГЛА. 2 ил., 1 табл.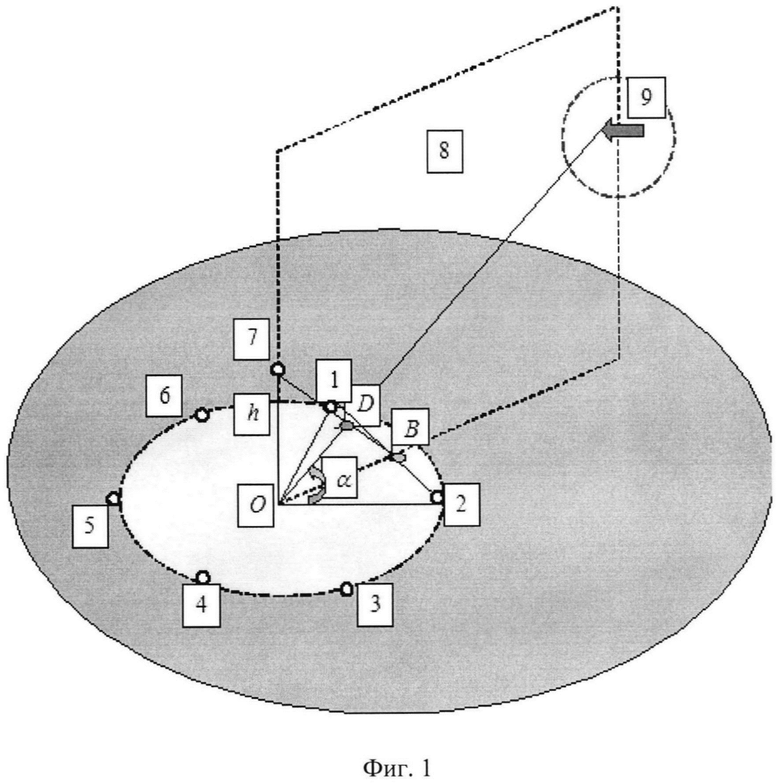
Способ поражения гиперзвуковых летательных аппаратов, заключающийся в том, что с помощью локационных средств обнаруживают летательный аппарат, с помощью вычислительного устройства определяют координаты его движения и направляют средство поражения в точку столкновения с этим летательным аппаратом, отличающийся тем, что гиперзвуковой летательный аппарат обнаруживают с помощью как минимум четырех пассивных приемников электромагнитных волн, работающих в диапазоне длин волн от 0,3 до 5 микрометров, причем как минимум три приемника располагаются в горизонтальной плоскости по окружности радиусом R с центром в точке О, а как минимум один приемник располагается на высоте h от этой горизонтальной плоскости на вертикальной оси, проходящей через центр в точке О, и в этом же центре О устанавливают на поворотной платформе средство поражения летательных аппаратов, представляющее собой мощный импульсный лазер, рабочая ось которого при повороте платформы проходит через центр в точке О, а сама поворотная платформа обеспечивает импульсный наклон оси лазера на угол α в вертикальной плоскости, проходящей через точку О и точку В, расположенную в горизонтальной плоскости на участке между парой приемников электромагнитных волн с максимальными значениями амплитуды принятых сигналов в каждый момент времени, по сравнению с амплитудами на других приемниках, расположенных в горизонтальной плоскости, на расстоянии, равном величине k1 , где - расстояние между приемниками, а величина k1 равна отношению амплитуд сигналов на этих приемниках, причем в знаменателе этого отношения находится величина максимальной амплитуды, а угол α в этой вертикальной плоскости образуется осью лазера в момент пересечения этой осью точки D на прямой от приемника, расположенного на вертикальной оси, с точкой В, причем расстояние от точки В до точки D определяется соотношением BD=k2p, где р - расстояние от приемника на высоте h до точки В, k2 - отношение амплитуд сигналов, условно принятых, в точке В и на приемнике на высоте h, причем амплитуда сигналов, условно принятых, в точке В определяется расчетом и равна произведению амплитуды с максимальным значением сигналов на приемнике в горизонтальной плоскости на коэффициент k1, после выполнения расчетов, в каждый момент реального времени с помощью вычислительного устройства подают команду на импульсный поворот платформы с лазером на вычисленный угол α в выбранной вертикальной плоскости, а также выдают команду на излучение мощного импульса энергии, которым поражают гиперзвуковой летательный аппарат.
, где - расстояние между приемниками, а величина k1 равна отношению амплитуд сигналов на этих приемниках, причем в знаменателе этого отношения находится величина максимальной амплитуды, а угол α в этой вертикальной плоскости образуется осью лазера в момент пересечения этой осью точки D на прямой от приемника, расположенного на вертикальной оси, с точкой В, причем расстояние от точки В до точки D определяется соотношением BD=k2p, где р - расстояние от приемника на высоте h до точки В, k2 - отношение амплитуд сигналов, условно принятых, в точке В и на приемнике на высоте h, причем амплитуда сигналов, условно принятых, в точке В определяется расчетом и равна произведению амплитуды с максимальным значением сигналов на приемнике в горизонтальной плоскости на коэффициент k1, после выполнения расчетов, в каждый момент реального времени с помощью вычислительного устройства подают команду на импульсный поворот платформы с лазером на вычисленный угол α в выбранной вертикальной плоскости, а также выдают команду на излучение мощного импульса энергии, которым поражают гиперзвуковой летательный аппарат.
| БОЕВОЙ ЛАЗЕР | 2011 |
|
RU2481544C1 |
| US 9683814 B2, 20.06.2017 | |||
| СПОСОБ ПОЛУЧЕНИЯ МОРФИНА, КОДЕИНА, ТЕБАИНА И ПАПАВЕРИНА ИЗ СПИРТОВО-АММИАЧНОГО ОПИЙНОГОМАТОЧНИКА | 0 |
|
SU189439A1 |
| СПОСОБ БОГДАНОВА ПОРАЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2586436C1 |
| RU 2004134279 A, 10.05.2006. | |||

