Изобретение относится к сборочному стенду для сборки двигателя, в частности, для двигателей, имеющих форму тела вращения большого размера, таких как авиационные газотурбинные двигатели, хотя не исключены и другие варианты его применения.
Такие двигатели состоят из нескольких соединенных между собой габаритных и тяжелых модулей. Модули доставляют на тележках на место сборки, где их приподнимают и стыкуют друг с другом для соединения. При этом необходимо соблюдать высокую точность позиционирования, а также тщательность при манипулировании по причине хрупкости некоторых составных частей модулей. Это является сложной задачей при работе с объемными и тяжелыми деталями. В этом смысле существующие сборочные стенды оказываются не совсем способными к решению таких задач. Пример такого стенда описан в документе FR 2952842 А. В документе WO 2005/014 377 раскрыта линия для сборки транспортных средств.
Погрешности позиционирования имеют несколько причин. Прежде всего модули сразу после их подъема начинают раскачиваться. Затем их вес существенно деформирует стенды, на которых они подвешены, что делает непредсказуемыми положения стыковки модулей.
Другие недостатки известных стендов касаются затрудненного доступа к модулям либо снизу после их установки на стенде, либо в некоторых местах их периферии.
Основная задача изобретения состоит в том, чтобы предложить стенд, который обеспечивает точность и повторяемость позиционирования, необходимую для нормального осуществления стыковок модулей. Другая задача, связанная с предыдущей, состоит в точном размещении уже установленных на стенды модулей в разных положениях или с разной ориентацией, чтобы осуществлять последовательные операции сборки в самых разных условиях в зависимости от фазы сборки и от модификации собираемого двигателя.
Таким образом, объектом изобретения является сборочный стенд для сборки двигателя, при этом стенд содержит: горизонтальную балку; две стойки; два средства направления и подъема-опускания, каждое из которых соединяет конец балки с одной из стоек; тележку, установленную на балке с возможностью перемещения вдоль балки; подвешенную к тележке подвесную раму; средство приведения во вращение подвесной рамы вокруг вертикальной оси, соединяющей подвесную раму с тележкой, при этом подвесная рама содержит люльку для крепления двигателя.
Эта комбинация средств позволяет в значительной степени добиться качества и вышеупомянутых преимуществ. Модуль, установленный на люльке, можно ориентировать и перемещать горизонтально и вертикально. Использование балки, по которой перемещаются скольжением кронштейн талей и подвижная тележка с подвесной рамой, способствуют хорошему относительному позиционированию модулей. Стойки и балку можно выполнить очень жесткими, и, следовательно, они мало подвергаются деформациям, а их соединение делает деформации предсказуемыми и воспроизводимыми при идентичном поднимаемом грузе, что можно использовать, как будет подробно описано ниже. Люлька содержит первую часть, соединенную с вертикальной осью, вторую часть со средствами крепления двигателя и средство перемещения второй части вдоль первой части, при этом вторая часть поддерживается первой частью, при этом первая часть и вторая часть выполнены в виде арок. Достигается большая свобода положения, и угловое положение двигателя можно регулировать по мере необходимости.
Согласно отличительному признаку, тележка содержит первую часть, соединенную с балкой, вторую часть, соединенную с вертикальной осью, и средства перемещения второй части относительно первой части в горизонтальном направлении, перпендикулярном к балке. При этом модуль, установленный на люльке, можно перемещать в боковом направлении, что еще больше увеличивает свободу позиционирования.
Важное усовершенствование состоит в добавлении к устройству одной и предпочтительно двух подъемных талей, расположенных на балке и перемещающихся вдоль балки. Тали обеспечивают те же возможности движения для другого модуля (или любого подвешенного к ним оборудования), что позволяет сближать модули друг с другом, одновременно направляя их в заданные положения. Это облегчает стыковки. При этом на талях установлен датчик веса поднимаемого ими груза, предпочтительно трехосный датчик веса поднимаемого груза. Действительно, знание этого веса позволяет оценить деформацию опор и, следовательно, определять движения, которые необходимо задавать для достижения точной стыковки модулей. Кроме того, отслеживание горизонтальных сил показывает присутствие и интенсивность усилий стыковки.
Другое средство повышения точности и надежности стыковок собираемых модулей состоит в том, что средства перемещения, соединяющие взаимно подвижные части стенда, содержат между двумя соединяемыми ими частями направляющие средства с промежуточными элементами качения, установленными без зазора и с предварительным напряжением.
Жесткость стенда повышают путем добавления соединительных балок для соединения стоек между собой, при этом соединительные балки содержат наклонные балки с перекрещивающимися направлениями.
Предпочтительно стыковки можно осуществлять почти автоматически при помощи связанного со стендом цифрового устройства, которое может быть выполнено с возможностью задавать движения, необходимые для стыковки, с высокой точностью, перемещая составные части стенда. Это устройство содержит цифровые средства автоматической коррекции перемещений в зависимости от веса грузов, поднимаемых талями и поддерживаемых люлькой. Действительно, знание нагрузок в сочетании с хорошей повторяемостью деформаций обеспечивает их вычисление.
Повторяемость деформаций можно обеспечить, в частности, если средства перемещения элементов стенда содержат между соединяемыми ими частями направляющие средства с промежуточными элементами качения, установленными без зазора и с предварительным напряжением.
Различные аспекты, отличительные признаки и преимущества изобретения, включая упомянутые выше и другие, будут более подробно описаны ниже со ссылками на следующие прилагаемые фигуры, которые иллюстрируют конкретный вариант осуществления изобретения.
На фиг. 1 показан стенд, общий вид;
на фиг. 2 показана подвижная тележка с установленными на ней соединяемыми модулями;
на фиг. 3 показана подвесная рама, общий вид;
на фиг. 4 показана главная люлька для установки модулей;
на фиг. 5 показано устройство крепления модулей;
на фиг. 6 показан механизм главной люльки, вид в разрезе;
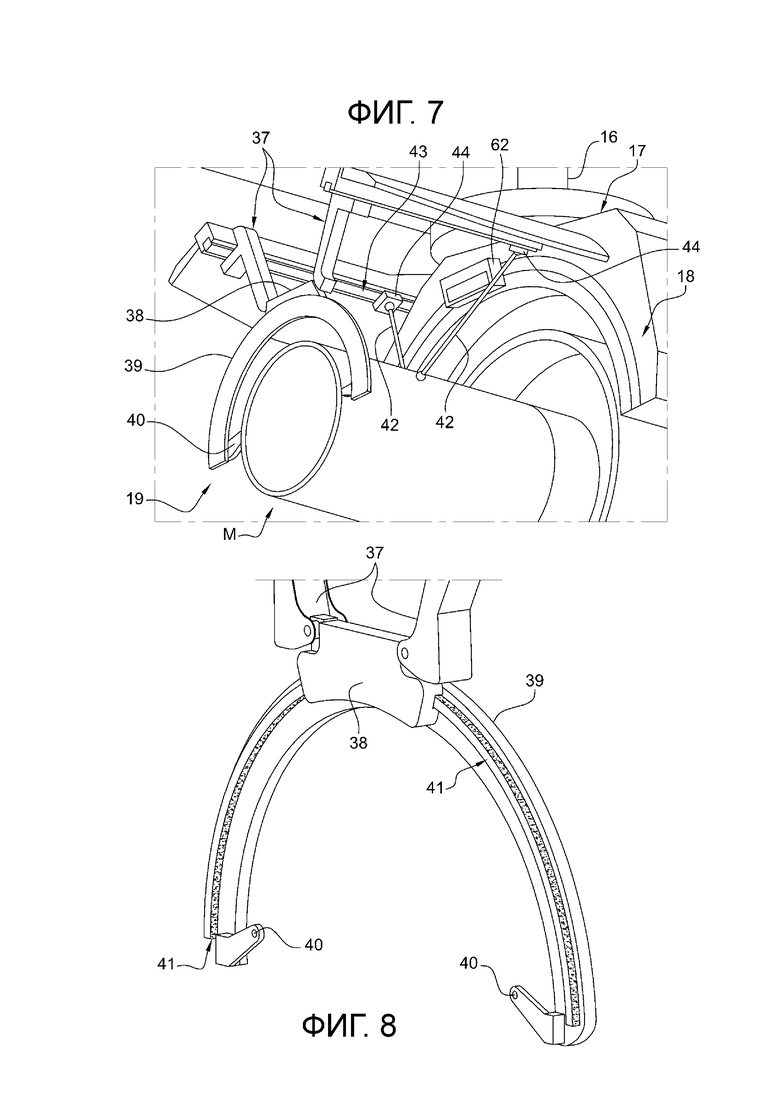
на фиг. 7 показана часть подвесной рамы, увеличенный вид;
на фиг. 8 показана вспомогательная люлька;
на фиг. 9 показан регулировочный домкрат;
на фиг. 10 показана главная подъемная таль;
на фиг. 11 показан вид снизу указанной тали;
на фиг. 12 показана вспомогательная таль;
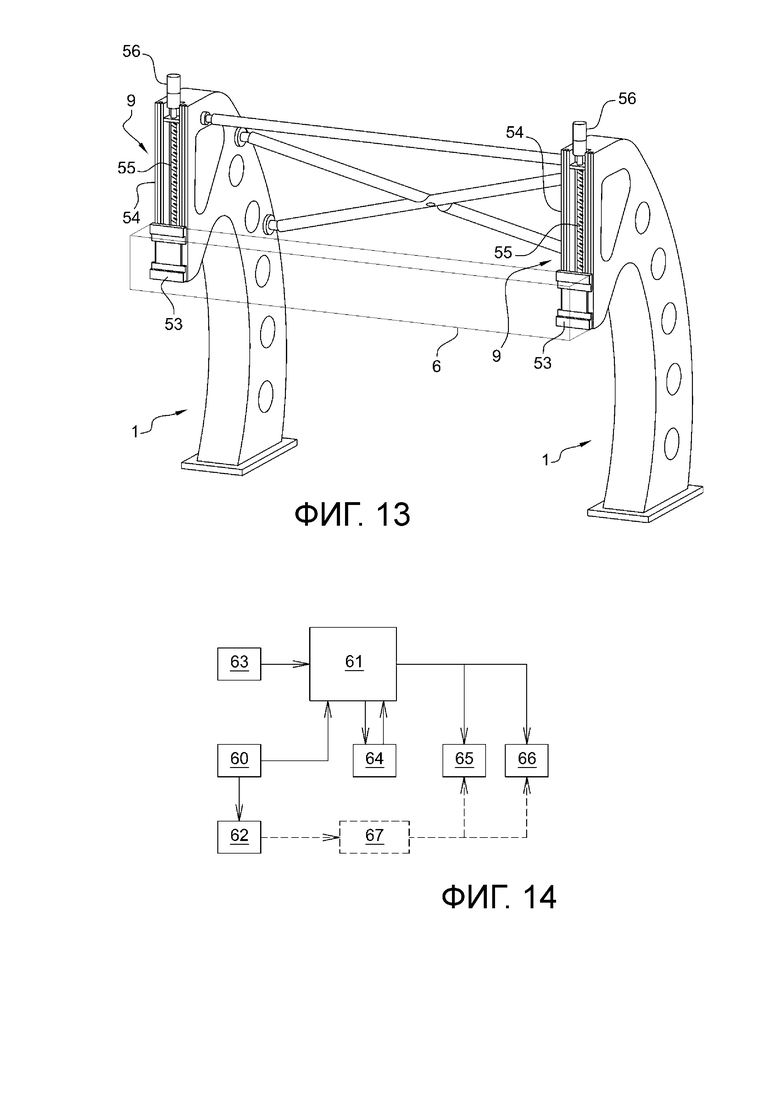
на фиг. 13 представлен монтаж горизонтальной балки на стенде;
на фиг. 14 показано устройство управления стендом.
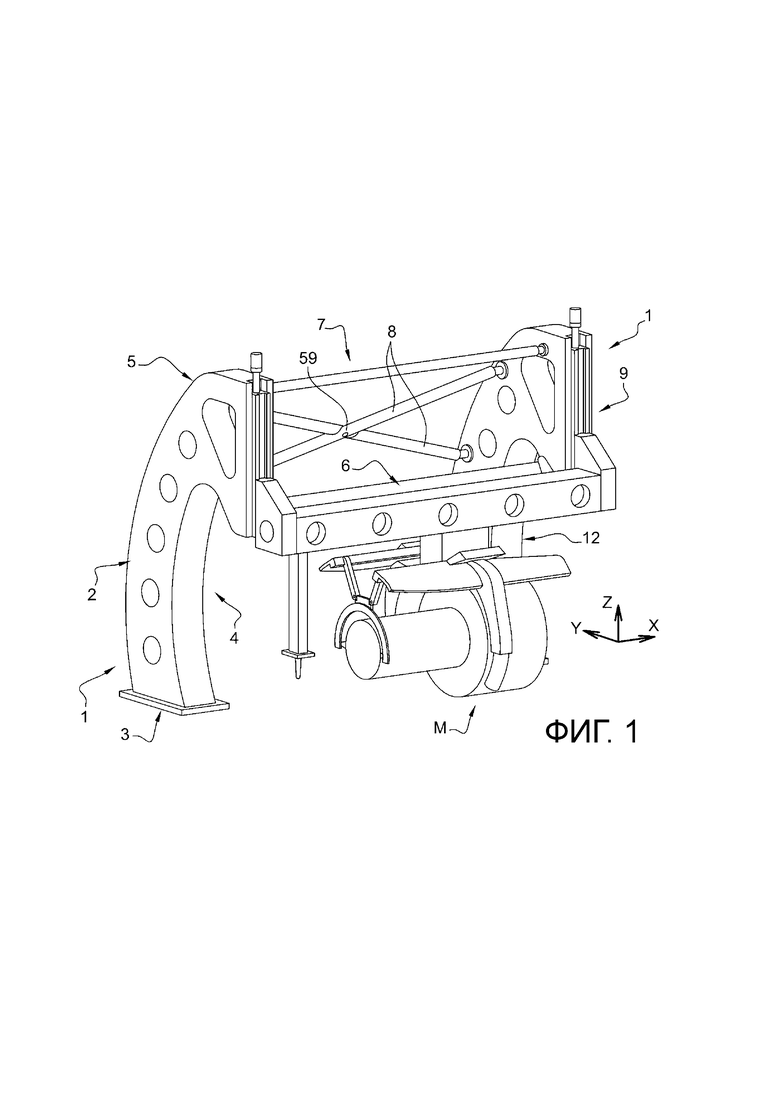
Сначала рассмотрим фиг. 1. Стенд содержит две подобные, параллельные и по существу вертикальные стойки 1, каждая из которых состоит из поднимающейся части 2, отходящей от подошвы 3, закрепленной на станине на земле, и имеющей наклон, отходя от продольной балки 6, которая должна поддерживать двигатель М и которая будет описана ниже, в направлении подъема по меньшей мере на части своей высоты. Поднимающаяся часть 2 имеет кривизну, вогнутость 4 которой направлена к двигателю М собираемому на стенде, и верхнюю часть 5, изогнутую в виде свода и расположенную между поднимающейся частью 2 и вертикальной стороной с установленными на ней средствами соединения с горизонтальной балкой 6. Эта стойка 1 С-образной формы имеет хороший внешний вид и одновременно небольшую консольность, надлежащую жесткость и надежность опоры на землю, обеспечивает большое пространство для работы вокруг двигателя и для доставки из разных мест оборудования и собираемых модулей. Жесткость стенда повышена за счет штанг 7, которые соединяют стойки 1 и некоторые из которых, обозначенные позициями 8, перекрещиваются и, кроме того, соединены между собой на пересечении 59, противодействуя, таким образом, различным прогибам (симметричным и несимметричным) стоек 1 в направлении протяженности горизонтальной балки 6 (ось Х показанной системы координат). Кроме того, стойки 1 являются исключительно жесткими по отношению к прогибам в плоскости двух других осей Y и Z системы координат.
Горизонтальная балка 6 является подвижной и может поступательно перемещаться в вертикальном направлении (ось Z), благодаря устройствам 9 подъема-опускания, которые соединяют соответственно каждый из ее концов с верхней частью 5 стойки 1. Эти устройства 9 подъема-опускания будут описаны ниже.
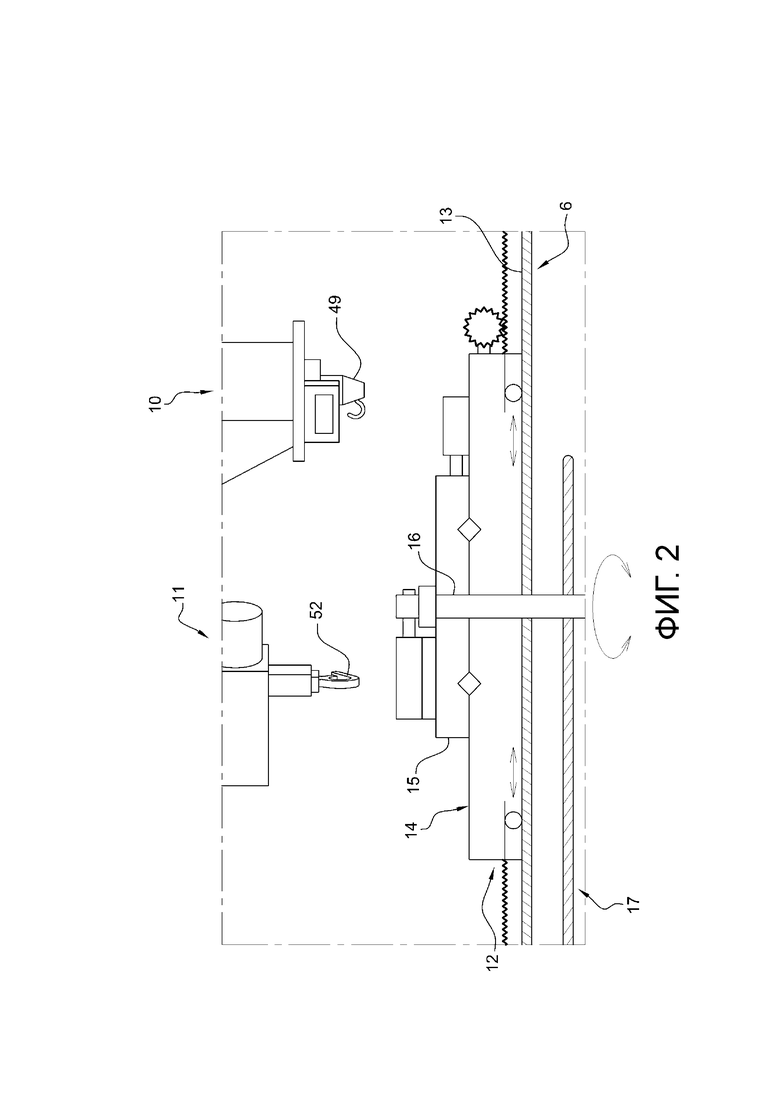
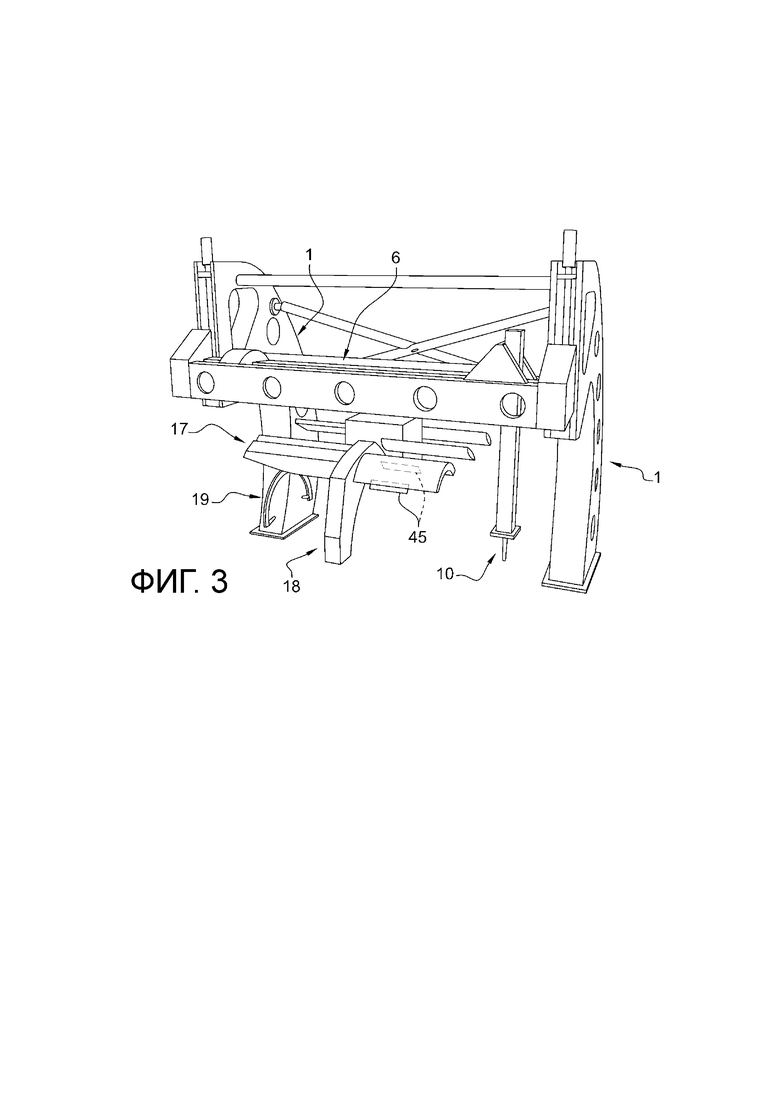
На горизонтальной части 6 установлены тали 10 и 11, а также тележка 12. Тали 10 и 11 предназначены для подъема различного оборудования, необходимого для сборки двигателей. Прежде всего нас интересует тележка 12, которая должна поддерживать двигатель М, установленный на стенде, и которая показана на фиг. 2 и 3. Тележка 12 может перемещаться по нижней дорожке 13 горизонтальной балки 6, которая проходит в главном направлении ее протяженности (Х). Она содержит нижний стол 14, установленный непосредственно на нижней дорожке 13, и верхний стол 15, установленный на нижнем столе 14 и перемещающийся относительно него горизонтально в перпендикулярном направлении (Y). На верхнем столе 15 установлена вертикальная ось 16 вращения, которая продолжена под горизонтальной балкой 6 и поворачивает деталь, называемую подвесной рамой 17, вокруг вертикальной оси Z. На подвесной раме 17 установлены главная люлька 18 и вспомогательная люлька 19, на которых крепят двигатель М.
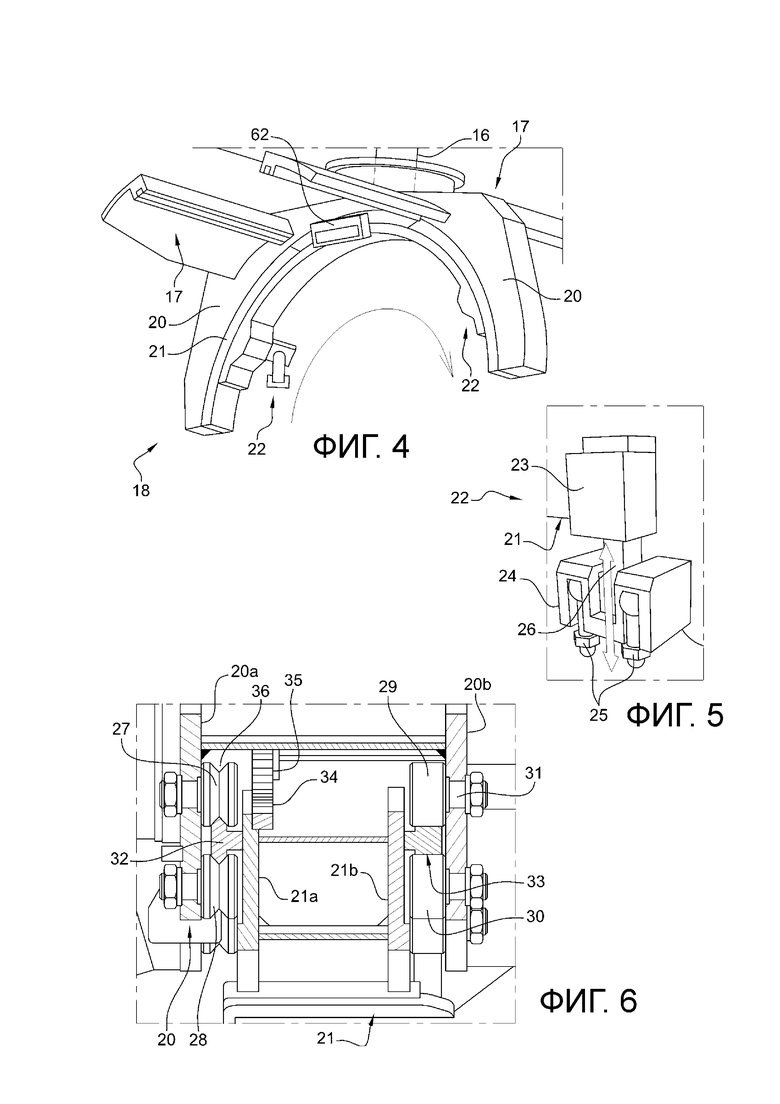
Далее следует описание главной люльки 18. Как показано на фиг. 4, она содержит первую часть 20, расположенную под подвесной рамой 17 и выполненную в виде арки, и вторую часть 21 тоже в виде арки, вписанную в первую часть и выполненную с возможностью поворачиваться на ней вокруг оси, параллельной с осью Х и совпадающей с осью двигателя М в собранном состоянии, что позволяет изменять ее боковой наклон и боковой наклон подвешенного к ней двигателя М. Для этого на второй части 21 установлены устройства 22 крепления двигателя М на ее концах, одно из которых показано на фиг. 5. Они содержат верхнюю вилку 23, закрепленную болтами на второй части 21, нижнюю скобу 24, снабженную болтами 25 для установки и крепления не показанных точек крепления двигателя М, и стержень 26, к которому подвешена нижняя скоба 24 и который удерживается своим верхним концом в верхней вилке 23. Благодаря этому устройству, чрезмерное опускание двигателя М, например, для его укладки на тележку после монтажа не приведет к повреждениям, так как стержни 26 поднимутся в верхних вилках 23 во время укладки двигателя М и, следовательно, компенсируют чрезмерные ходы устройств 9 подъема-опускания.
На фиг. 6 показано, каким образом вторая часть 21 удерживается первой частью 20. Эта первая часть оснащена двумя парами криволинейных рядов роликов, расположенных по дуге окружности вокруг одной и той же центральной оси и включающих в себя ряд эксцентриковых рифленых роликов 27 и ряд концентричных рифленых роликов 28, с одной стороны, и пару эксцентриковых прямых роликов 29 и ряд концентричных прямых роликов 30, с другой стороны. Ролики 27, 28 и 29, 30 вставлены между боковинами 20а или 20b первой части 20 и параллельными боковинами 21а или 21b второй части 21. Их оси 31 вращения установлены на боковинах 20а и 20b первой части 20. Вторую часть 21 точно поддерживают первая направляющая 32 в виде дуги окружности, закрепленная на одной из боковин 21а второй части 21 и удерживаемая между рифлеными роликами 27 и 28, и вторая направляющая 33, противоположная первой, закрепленная на другой боковине 21b второй части 21 и удерживаемая между прямыми роликами 29 и 30. Монтаж производят с небольшим предварительным напряжением, которое позволяет убрать зазор и, следовательно, обеспечивает высокую точность положения второй части 21 относительно первой части 20 и задаваемых им движений; как будет показано ниже, такой монтаж без зазора элементов трансмиссии применяют в целом между взаимно подвижными частями стенда для получения таких же преимуществ. Боковое положение второй части 21 обеспечено выступающей формой в середине толщины первой направляющей 32, которая позволяет ей следовать форме сечения канавок роликов 27 и 28. Вторая направляющая 33 является плоской. Кроме того, на боковине 21а закреплена дугообразная зубчатая рейка 34, которая зацепляется с шестерней 35 через двигатель 36, закрепленный на первой части 20. Благодаря этой компоновке, становится возможным вращение второй части 21 на первой части 20. Амплитуда движения может составлять +/- 70°, чтобы поворачивать собранный двигатель М на стенде и располагать все его части на высоте или с ориентацией, облегчающими ручные операции сборки.
Далее рассмотрим фиг. 7 и 8. Вспомогательная люлька 19 содержит пару жестких плеч 37, подвешенных к подвесной раме 17, первую часть 38, подвешенную к плечам 37, и вторую часть 39, перемещающуюся скольжением по первой части 38. Обе части 38 и 39 выполнены в виде арок (хотя первая может быть короткой) и совершают такое же движение вращения одна на другой, что и части 20 и 21 главной люльки 18. Кроме того, все эти части 20, 21 и 38, 39 в виде арок являются коаксиальными. На концах второй части 39 установлены устройства 40 крепления двигателя М любого типа (в данном случае показаны лапки, имеющие отверстие для прохождения крепежного болта), и вторая часть 39 подвешена к первой части 38 через свою направляющую 41, выполненную на одной стороне, сечение которой может быть таким же, как и у первой направляющей 32, показанной на фиг. 6, и которая удерживается криволинейной направляющей системой с рециркуляцией шариков, находящихся в первой части 38. Однако, поскольку на вспомогательную люльку 19 действуют меньшие усилия веса двигателя М, направляющее устройство является более простым и менее протяженным в угловом направлении. Здесь нет никакого приводного двигателя, так как вторая часть 39 следует движениям вращения, задаваемым второй частью 21 главной люльки 18.
Подвесная рама 17 содержит также талрепы 42, которые тоже могут удерживать двигатель М во время его сборки между люльками 18 и 19. Они представляют собой вытянутые штанги регулируемой длины, которые можно перемещать в продольном направлении подвесной рамы 17 и которые перемещают скольжением каретки 44, к которым они подвешены, по направляющим 43.
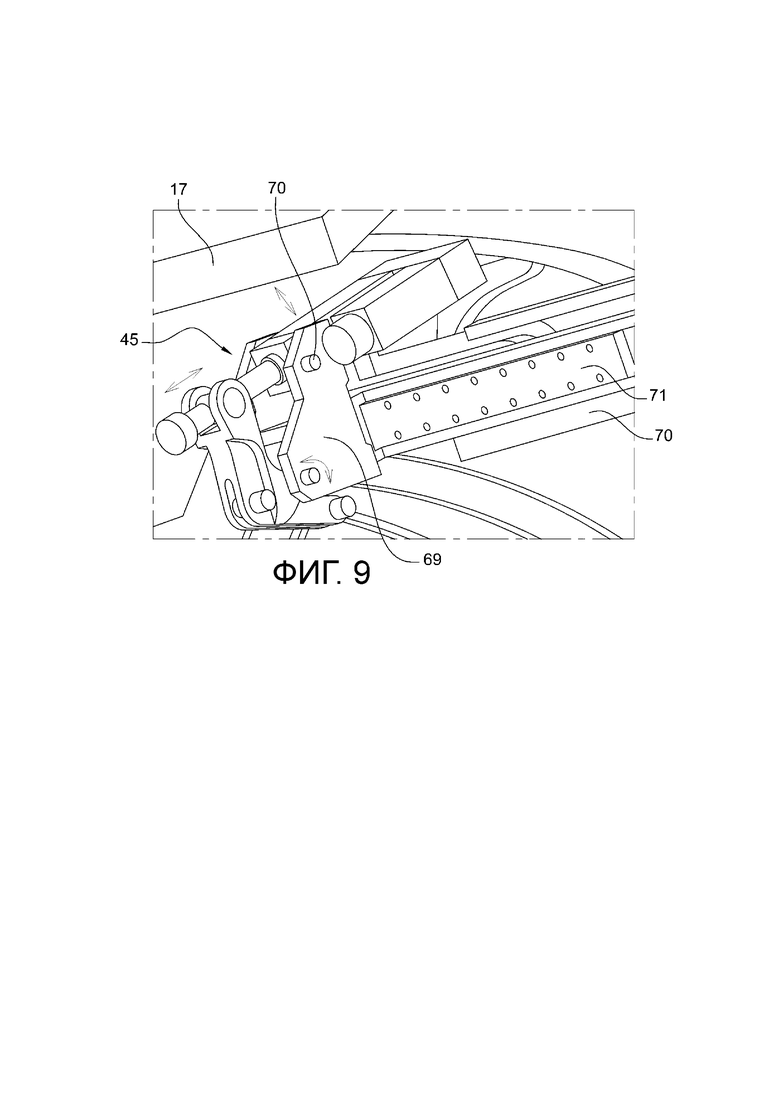
Под подвесной рамой 17 расположены электромеханические домкраты 45 (фиг. 9), выполненные с возможностью крепления на двигателе М и изменения его продольного крена, поворачивая его вокруг поперечной оси Y за счет движения выдвигания вдоль оси Х. Это позволяет восстанавливать положение двигателя М путем обеспечения горизонтальности его оси вращения. Два из этих электромеханических домкратов 45 расположены с двух сторон от центра подвесной рамы 17 и с параллельными направлениями выдвигания.
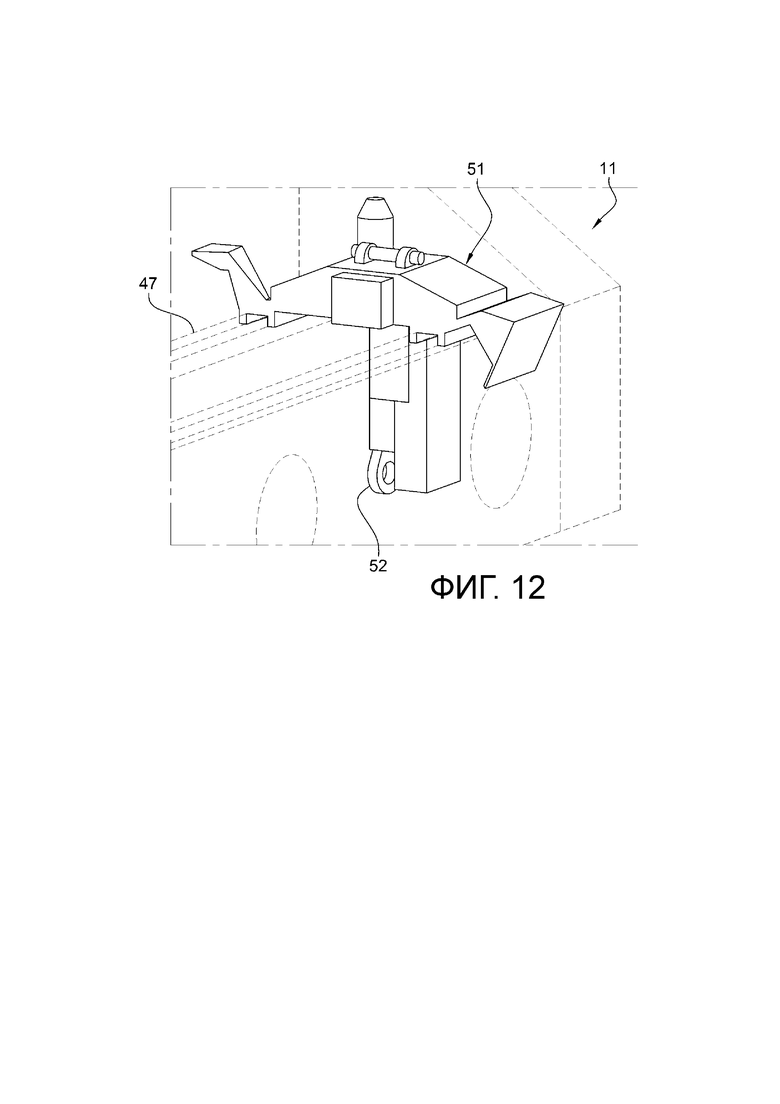
Далее со ссылками на фиг. 10 и 11 следует общее описание главной тали 10. Она установлена на подвижной каретке 46, перемещающейся скольжением по верхней дорожке 47 горизонтальной балки 6. Она содержит вертикальную трубу 48, которая проходит через горизонтальную балку 6, продолжена под ней и содержит на своем нижнем конце подъемный крюк 49, подвешенный к жесткой трубе 48 при помощи промежуточной детали, содержащей трехосный датчик 50 усилия. Вспомогательная таль 11 тоже содержит подвижную каретку 51 на той же верхней дорожке 47 и цепь 52, которая может разматываться под подвижной кареткой 49 на разную длину (фиг. 12).
Возвратимся к фиг. 2. Если в обычном состоянии стенда тали 10 и 11 расположены с двух сторон от подвижной тележки 12, это состояние не является заданным, поскольку тележка 12 перемещается скольжением по нижней дорожке 13, которая находится намного ниже верхней дорожки 47. За счет подъема вертикальной трубы 48 и наматывания цепи 52 можно перемещать тали 10 и 11 над подвижной тележкой, чтобы они располагались обе с любой стороны от подвесной рамы 17. Их можно также опускать между жесткими плечами 37.
Далее следует описание некоторых технологических особенностей.
На фиг. 13 видно, что горизонтальная балка 6 подвешена к подвижным кареткам 53, перемещающимся вдоль вертикальных кулис 54, каждая из которых образована парой параллельных направляющих, выполненных на плоских сторонах стоек 1. Каретки 53 удерживаются между парами направляющих при помощи не показанной классической системы с рециркуляцией шариков. Устройство содержит также червяк 55, расположенный между каждой парой направляющих, который приводится в движение двигателем 56, закрепленным на вершине соответствующей стойки 1, и вращение которого приводит к подъему или опусканию гайки, закрепленной на каретке 53. Шариковые направляющие кареток 53 могут быть предварительно напряжены и, следовательно, не имеют зазоров, а двигатели 56 синхронизированы между собой при помощи вариаторов типа «ведущий-ведомый» с абсолютным кодирующим устройством и оснащены тормозами. Это устройство позволяет управлять с высокой точностью движениями горизонтальной балки 6 за счет отсутствия зазоров и с высокой степенью надежности с учетом необратимости движения между червяками и гайками, и балка удерживается горизонтально, благодаря синхронизации двигателей 56.
Горизонтальные движения подвесной рамы 17 в обоих направлениях происходят при помощи аналогичных направляющих систем, которые соединяют нижний стол 14 с горизонтальной балкой 6, с одной стороны, и с верхним столом 15, с другой стороны, и которые содержат кулисы, по которым перемещаются скольжением столы 14 и 15 с предварительно напряженными промежуточными шариками, что тоже обеспечивает монтаж без зазора и с высокой точностью положения в любой момент. Движения можно обеспечивать либо при помощи механизмов с шестерней и зубчатой рейкой, либо при помощи шариковых винтов. Вертикальная ось 16 может быть установлена на верхнем столе 15 при помощи подшипника с предварительно нагруженными перекрестными роликами. Электромеханические домкраты 45 закреплены на вилках 69 при помощи цапф 70 и выдвигаются при помощи систем с трансмиссионным ремнем без зазора и с шариковым винтом. Они закреплены на подвесной раме 17 в кулисах 70 при помощи направляющих 71 и кареток с предварительно напряженными шариками, которые гарантируют отсутствие существенной деформации под нагрузкой.
Вертикальная труба 48 тали 10 перемещается на подвижной каретке 46 при помощи механизма, аналогичного механизму систем 9 подъема-опускания горизонтальной балки 6 и описанного со ссылками на фиг. 13. Подъемный двигатель, установленный на подвижной каретке 46, приводит во вращение гайку, и на вертикальной трубе 48 установлены неподвижный винт и кулисы направляющей системы, которые перемещаются скольжением в подвижной каретке 46.
Поступательное перемещение талей 10 и 11 происходит за счет направляющих систем без зазора, и движение обеспечивается системами с шестерней и зубчатой рейкой.
Сочетание направляющих механизмов без зазора и приводных систем с двигателем, которыми можно управлять с высокой точностью, благодаря трансмиссиям без зазора и редукторам с большим передаточным отношением, позволяет располагать модули двигателя М в строго определенных положениях и, следовательно, гарантировать их стыковку. Кроме того, трехосный датчик 50 измеряет вес грузов, которые последовательно поднимают при помощи тали 10 и которые соединяют между собой по мере сборки двигателя М.
На фиг. 14 в обобщенном виде представлена схема управления стендом. Датчики 60, включающие в себя трехосный датчик 50 и датчики положения различных механических узлов, передают свои показания в систему 61 управления; некоторые из этих показаний, такие как измерения трехосного датчика 50, выводятся также на индикаторы 62, которые могут быть расположены в разных местах стенда в пределах видимости операторов.
Зная значения поднимаемого веса и положения различных элементов, система 61 управления вычисляет деформации 64 различных элементов стенда. Она может использовать калибровочные измерения, произведенные заранее, например, при помощи лазера, и сохраненные в базе 63 данных. На их основании она выводит поправки траектории, которую необходимо задавать элементам и, в частности, подъем талей 10 и 11, для управления стыковкой модулей с высокой точностью. После вычисления траекторий, скорректированных в зависимости от деформаций, система 61 управления действует на двигатели 65, чтобы управлять траекториями стыковки, и задает функции скорости вдоль траекторий при помощи вариаторов 66 скорости, соединенных с двигателями. Вместе с тем, операторы (обозначенные на схеме позицией 67) полностью контролируют движения и могут вручную вводить поправки траекторий, действуя на двигатели 65 и вариаторы 66 скорости в соответствии с показаниями индикаторов 62.
Последовательность сборки может включать в себя следующие этапы. Первый модуль двигателя М, установленный на подвижной тележке, располагают под подвесной рамой 17. После этого ее опускают и поворачивают, чтобы расположить главную люльку 18 на надлежащей высоте и с надлежащей ориентацией. При помощи горизонтальных движений подвесной рамы 17 располагают устройства 22 крепления перед соответствующими средствами, имеющимися на модуле, и производят крепление. Модуль приподнимают и располагают в соответствующем направлении для присоединения других модулей, которые поднимают при помощи главной тали 10 и приближают к подвесной раме 17, перемещая главную таль 10 по верхней дорожке. Вспомогательную люльку 19 можно задействовать, когда на главной люльке 18 установлено большое количество модулей и когда возникает необходимость в дополнительном держателе. Операцию можно осуществлять, либо закрепив другой модуль на вспомогательной люльке и перемещая вспомогательную люльку для соединения этого модуля с двигателем М, либо закрепив на вспомогательной люльке двигатель М, уже удерживаемый главной люлькой 18. После установки главных модулей при помощи главной тали 10 и, возможно, вспомогательной тали 11, можно вручную установить вспомогательное оборудование двигателя М (насосы, электрические двигатели, трубопроводы и т.д.). После этого можно свободно перемещать двигатель М на стенде, чтобы располагать его в наиболее удобных положениях по высоте и ориентации для каждой операции. Возможность поворачивать двигатель вокруг его оси позволяет, в частности, располагать все его образующие на надлежащей высоте для операций сборки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОИЗВОДСТВЕННЫЙ ОБЪЕКТ | 2014 |
|
RU2644968C2 |
| ТЕПЛИЧНАЯ АГРОСИСТЕМА | 1993 |
|
RU2050087C1 |
| Подмости для монтажа цилиндрических куполообразных сооружений | 1985 |
|
SU1317077A1 |
| Устройство для сборки секции стоек | 1990 |
|
SU1785942A1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Полуавтоматическая линия для сборки трубчатых секций теплообменников | 1982 |
|
SU1134336A1 |
| ПОГРУЗЧИК БОРТОВОЙ | 1998 |
|
RU2216462C2 |
| УСТАНОВКА ДЛЯ ОСМОТРА СТВОЛОВ И АВАРИЙНОГО ПОДЪЕМА ЛЮДЕЙ | 2006 |
|
RU2311333C1 |
| СТЕНД ДЛЯ КОМПЛЕКСНОГО ТЕСТИРОВАНИЯ И НАСТРОЙКИ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА МУЛЬТИРОТОРНОГО ТИПА | 2024 |
|
RU2826664C1 |
| СИЛОВОЙ БЛОК ДЛЯ АППАРАТА-НОСИТЕЛЯ МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ | 2014 |
|
RU2659162C2 |

Изобретение относится к области сборочного производства. Стенд для сборки двигателя (М) содержит две стойки (1), горизонтальную балку (6), установленную на стойках (1) с возможностью поступательного перемещения в вертикальном направлении с помощью двух средств (9) подъема-опускания, каждое из которых расположено на стойке (1), тележку (12), установленную на балке (6) с возможностью перемещения вдоль нее, подвесную раму, подвешенную к тележке (12) с возможностью вращения вокруг вертикальной оси, соединяющей подвесную раму с тележкой (12), и средство приведения в упомянутое вращение подвесной рамы, при этом подвесная рама содержит люльку для крепления двигателя (М). При этом люлька включает в себя первую часть, соединенную с вертикальной осью, и вторую часть с установленным на ней устройством для крепления двигателя (М), причем первая и вторая части выполнены в виде арок, а вторая часть установлена с поддержкой первой частью и с возможностью вращения вдоль первой части с помощью средства для вращения. Использование изобретения позволяет повысить точность сборочных операций. 13 з.п. ф-лы, 14 ил.
1. Сборочный стенд для сборки двигателя (М), содержащий две стойки (1), горизонтальную балку (6), установленную на стойках (1) с возможностью поступательного перемещения в вертикальном направлении с помощью двух средств (9) подъема-опускания, каждое из которых расположено на стойке (1), тележку (12), установленную на балке (6) с возможностью перемещения вдоль нее, подвесную раму (17), подвешенную к тележке (12) с возможностью вращения вокруг вертикальной оси (16), соединяющей подвесную раму (17) с тележкой (12), и средство приведения в упомянутое вращение подвесной рамы, при этом подвесная рама (17) содержит люльку (18) для крепления двигателя (М), отличающийся тем, что люлька (18) включает в себя первую часть (20), соединенную с вертикальной осью (16), и вторую часть (21) с установленным на ней устройством (22) для крепления двигателя (М), при этом первая часть и вторая часть выполнены в виде арок, а вторая часть установлена с поддержкой первой частью и с возможностью вращения вдоль первой части с помощью средства для вращения.
2. Сборочный стенд по п. 1, отличающийся тем, что подвесная рама (17) содержит вспомогательную люльку (19), которая имеет первую часть, подвешенную к подвесной раме, и вторую часть, на которой установлены средства (40) для крепления двигателя (М), при этом первая часть и вторая часть выполнены в виде арок, а вторая часть установлена с поддержкой первой частью и с возможностью свободного вращения вдоль первой части, причем упомянутые арки люльки (18) и вспомогательной люльки (19) выполнены коаксиальными по отношению друг к другу.
3. Сборочный стенд по п. 1 или 2, отличающийся тем, что он содержит по меньшей мере одну подъемную таль (10), установленную на балке (6) с возможностью перемещения вдоль нее.
4. Сборочный стенд по п. 3, отличающийся тем, что на тали (10) установлен датчик (50) веса поднимаемого груза.
5. Сборочный стенд по п. 4, отличающийся тем, что упомянутый датчик (50) выполнен в виде трехосного датчика веса поднимаемого груза.
6. Сборочный стенд по любому из пп. 3-5, отличающийся тем, что таль (10) выполнена с возможностью перемещения по дорожке (47) балки (6), которая расположена над дорожкой (13) балки (6), по которой перемещается тележка (12), при этом таль установлена с возможностью полного подъема до уровня, находящегося выше вершины подвижной тележки (12) и подвесной рамы (17).
7. Сборочный стенд по любому из пп. 1-6, отличающийся тем, что подвижная тележка (12) содержит нижний стол (14), соединенный с балкой (6), верхний стол (15), соединенный с вертикальной осью (16), и средства перемещения верхнего стола (15) относительно нижнего стола (14) в горизонтальном направлении, перпендикулярном к балке (6).
8. Сборочный стенд по любому из пп. 1-7, отличающийся тем, что упомянутые устройства (22) люльки (18) выполнены с возможностью закрепления двигателя (М) со свободным вертикальным смещением.
9. Сборочный стенд по любому из пп. 1-8, отличающийся тем, что он содержит соединительные штанги (7), соединяющие между собой стойки (1), при этом соединительные штанги содержат наклонные штанги (8), расположенные с перекрещивающимися направлениями.
10. Сборочный стенд по любому из пп. 1-9, отличающийся тем, что стойки (1) содержат поднимающуюся часть (2), выполненную вогнутой со стороны размещения собираемого двигателя (М), и верхнюю часть (5), изогнутую в виде свода, на которой расположена горизонтальная балка (6).
11. Сборочный стенд по п. 1 или 10, отличающийся тем, что он содержит устройство (61) управления двигателями (65) и связанными с ними вариаторами (66) скорости, выполненное с возможностью обеспечения заданных перемещений подвижных частей стенда.
12. Сборочный стенд по п. 4 или 5, отличающийся тем, что он содержит устройство (61) управления с цифровыми средствами автоматической коррекции перемещения подвижных частей стенда в зависимости от значений веса, поднимаемого талью (10).
13. Сборочный стенд по любому из пп. 4, 5 или 12, отличающийся тем, что он содержит индикатор (62) поднимаемого или поддерживаемого веса.
14. Сборочный стенд по любому из пп. 1-13, отличающийся тем, что упомянутое средство для вращения содержит между соединяемыми им двумя частями (20) и (21) направляющие средства с промежуточными элементами качения, установленными без зазора и с предварительным напряжением.
| Дифференциальный усилитель | 1978 |
|
SU702487A1 |
| Стенд для сборки и разборки головок цилиндров двигателей внутреннего сгорания | 1975 |
|
SU519312A1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| Способ выделения твердой фазы фотографических эмульсий с коллоидными размерами микрокристаллов галоидного серебра | 1957 |
|
SU110670A1 |
| WO 2005014377 A1, 17.02.2005 | |||
| US 6202566 B1, 20.03.2001. | |||

