Изобретение относится к грузовому транспорту на магнитном подвесе и предназначено для доставки грузов в высотные и подземные сооружения в вертикальном положении. Вертикальный магнитолевитационный транспортный путь на магнитном подвесе, содержащий монорельсовый транспортный путь, подвижную каретку с манипулятором, размещенный в вертикальном положении соединяющий транспортный путь с выше и ниже расположенными пунктами выдачи и отправки груза.
Известно изобретение, немецкая фирма ThyssenKrupp провела публичную демонстрацию лифта MULTI на магнитной подушке. https://yandex.ru/turbo?text=https%3A%2F%2Fnplus1.ru%2Fnews%2F2017%2F06%2 F26%2Fmaglev-elevator&d=1. Это изобретение было представлено на международной конференции по магнитной левитации 4 сентября 2018 года в Санкт-Петербурге. За счет отсутствия тросов и специальной поворотной подвески лифт может двигаться не только вертикально, но и в горизонтальном или диагональном направлении. По заявлению создателей, такая концепция, при наличии нелинейной системы шахт, позволит снизить время ожидания лифтов. Об этом сообщает издание Wired.
Из-за огромной вместимости небоскребов инженеры придумывают различные концепции, позволяющие увеличить пропускную способность лифтов. Помимо самого очевидного способа - увеличения количества шахт, существуют и другие концепции. К примеру, парные лифты с переменным расстоянием между кабинами, которые анализируют то, на какие этажи хотят подняться пассажиры и направляют их в разные кабины. Компания ThyssenKrupp решила использовать для той же цели совершенно иную схему - систему из связанных между собой горизонтальных и вертикальных шахт. Но для того, чтобы не вынуждать пассажиров пересаживаться из вертикальных в горизонтальные кабины, инженерам пришлось серьезно пересмотреть все механическое устройство кабины и шахты. И если в 2014 году был представлен лишь концепт, то теперь компания продемонстрировала полностью работоспособный и полноразмерный прототип лифта.
Механизм движения рельса аналогичен тому, который используется в поездах на магнитной подушке. В них поезд не опирается на рельсовую систему напрямую, а зависает над ней за счет сильного магнитного поля. Движение вдоль рельса осуществляется за счет линейного двигателя, который также использует магнитное поле. За счет такой конструкции двигаемая часть поезда не соприкасается с другими элементами, трение между ними отсутствует. Такое взаимодействие кабины и рельсов позволило инженерам создать лифт без единого троса. Это решение имеет как преимущества, так и недостатки.
Основной частью концепции является создание нелинейной системы лифтовых шахт, которая позволит лифтам перемещаться по разным частям здания «обгонять» друг друга в случае долгой посадки пассажиров или поломки. Помимо этого, создатели утверждают, что их система не имеет каких-либо ограничений по высоте шахты.
Однако, отсутствие троса также, вероятно, увеличит потребление энергии. Обычные лифты связаны с помощью троса с противовесом, который соответствует по массе загруженной или пустой кабине. За счет этого нагрузка на тяговый двигатель значительно уменьшается. Помимо этого, необходимо отметить, что компания не раскрывает данные о наличии и устройстве аварийной системы на случай отключения электричества.
В прошлом году вдохновившись концептом MULTI, канадский инженер предложил для него новое применение - передвижную комнату, которая может перемещаться по фасаду здания и «парковаться» у окна квартиры, расширяя таким образом ее площадь.
Основные недостатки этого изобретения - это большое потребление электроэнергии линейным двигателем и электромагнитами, много трущихся подвижных механических узлов, что понижает надежность в эксплуатации, нет возможности перевозить грузы с автоматической передачей кабины (капсулы) на другой путь, нет системы безопасности при отключении электроэнергии не понятно, что будет с кабиной лифта находящейся на вертикальном пути.
Изобретение направлено на устранение этих недостатков, левитация на вертикальном монорельсе достигается за счет постоянных магнитов, без поворотных узлов, кабина (капсула) находящаяся на вертикальном пути при отключении электроэнергии будет отпускаться медленно и зафиксируется, на электроэнергии от аварийного аккумулятора в депо, кабина (капсула) не является конструкцией подъемного устройства.
Технический результат, заключается в упрощении конструкции, ее удешевлении, снижение количества трущихся деталей, расширение функциональных и эксплуатационных возможностей, за счет обеспечения доставки груза в пункты выдачи и отправки в высотных зданиях в городской инфраструктуре с повышенной скоростью и безопасностью, достигается в вертикальном магнитолевитационном транспортном пути, содержащий монорельс, подвижную каретку, статор линейного электродвигателя, взаимодействующий с ротором каретки, постоянные магниты монорельса и каретки, взаимодействующие одноименными полюсами, электромагнит боковой стабилизации, взаимодействующий с постоянным магнитом каретки, в свою очередь в каретке установлены страховочные ролики с тормозной системой, отличающийся тем, что содержит подвижный участок и фиксирующие элементы, расположенные справа и слева от монорельса, а также сверху и снизу относительно подвижного участка, который взаимодействует с монорельсом и фиксирующими элементами, при этом подвижный участок сверху и снизу содержит ротор линейного двигателя, взаимодействующий со статором из постоянных магнитов монорельса и статором фиксирующего элемента, направляющие, взаимодействующие с направляющими монорельса, и направляющими фиксирующего элемента, расположенного в стороне от монорельса, монорельс в месте разрыва содержит аварийные ролики с тормозами, взаимодействующими с поверхностью подвижного участка, а фиксирующий элемент содержит ролики с тормозами, причем между подвижным участком, монорельсом и фиксирующим элементом для работы линейного двигателя обеспечен воздушный зазор.
Вертикальный магнитолевитационный транспортный путь отличается также тем, что каретка содержит манипулятор, крепеж, связывающий каретку с манипулятором, захват для капсулы, который содержит статор линейного двигателя, взаимодействующий с ротором капсулы, постоянный магнит, взаимодействующий с постоянным магнитом капсулы одноименным полюсом, постоянный магнит, взаимодействующий с электромагнитом капсулы, аварийный ролик, и рычаг, связанный шарнирным механизмом с захватом, при этом рычаг, связанный шарнирным механизмом с захватом и линейным механизмом, содержит постоянный магнит, взаимодействующий с постоянным магнитом капсулы одноименным полюсом, постоянный магнит, взаимодействующий с
Вертикальный магнитолевитационный транспортный путь может содержать подвижный участок с поперечными направляющими, взаимодействующими со станиной для горизонтального перемещения посредством электродвигателя внутри здания.
Сущность заявленного технического решения поясняется чертежами 1-10,
где:
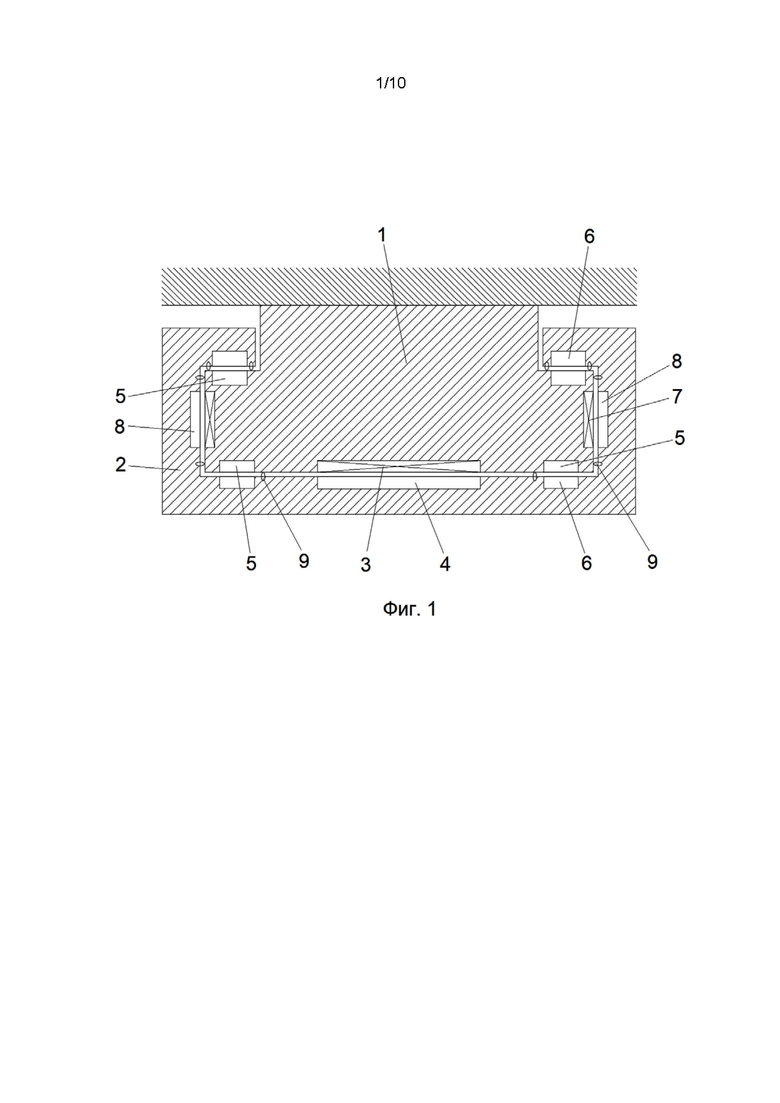
на фиг. 1 представлен поперечный разрез транспортного пути и каретки;
на фиг. 2 представлен поперечный разрез подвижного участка и транспортного пути;
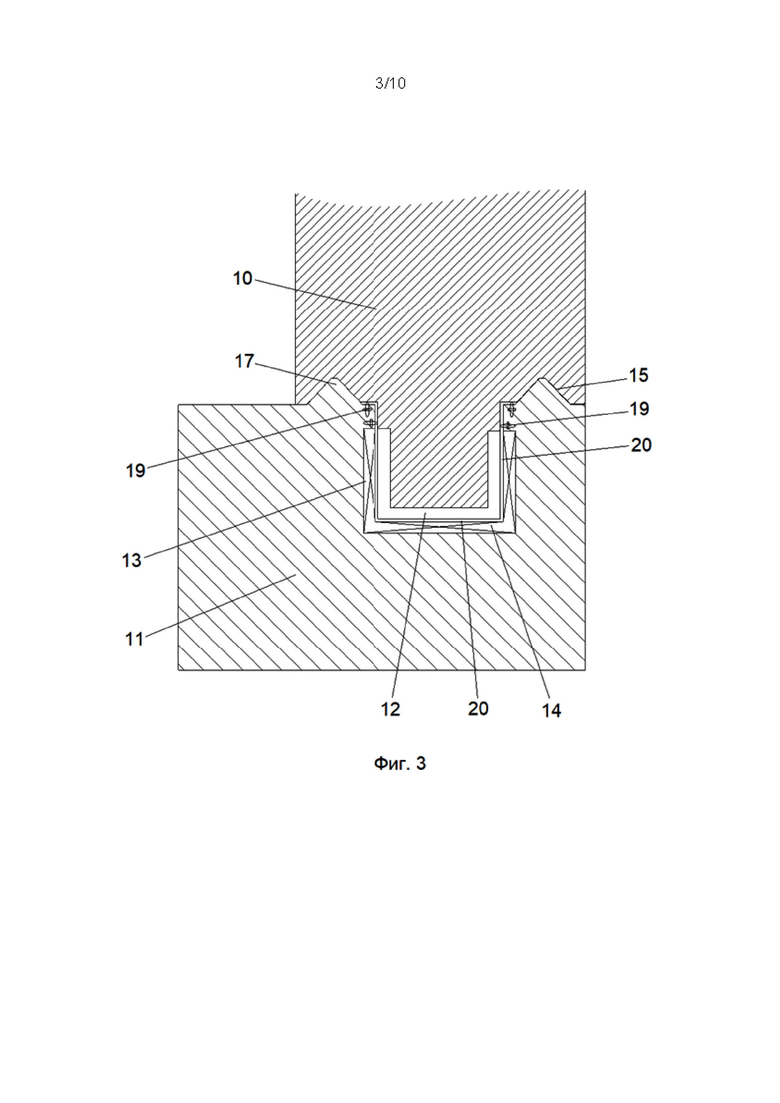
на фиг. 3 представлен поперечный разрез подвижного участка и элемента крепления;
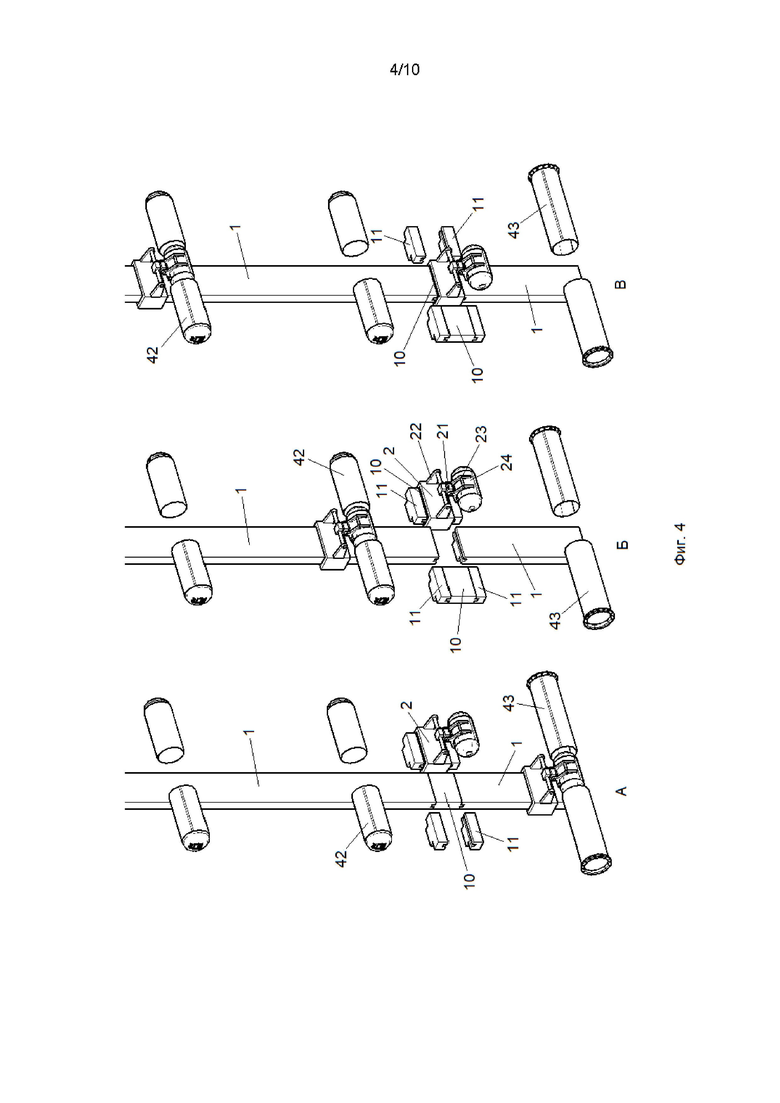
на фиг. 4 изображен в изометрии порядок работы вертикального транспортного пути;
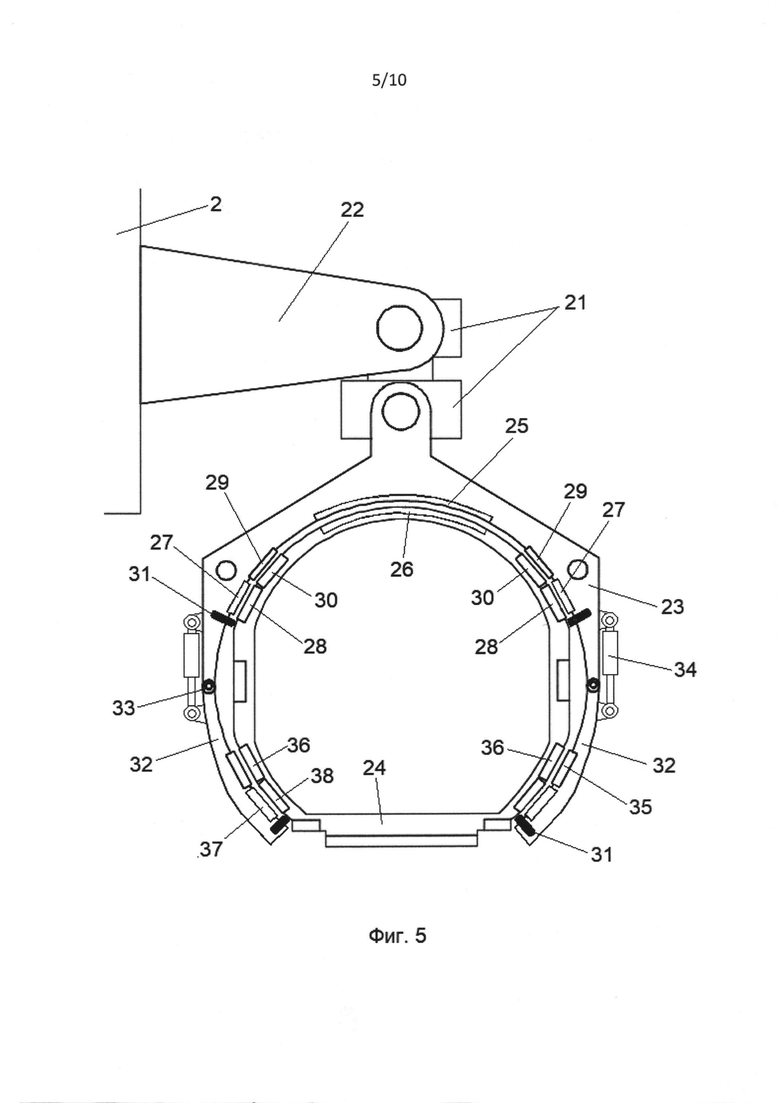
на фиг. 5 показан в разрезе манипулятор и капсула без люков, в положении захвата капсулы;
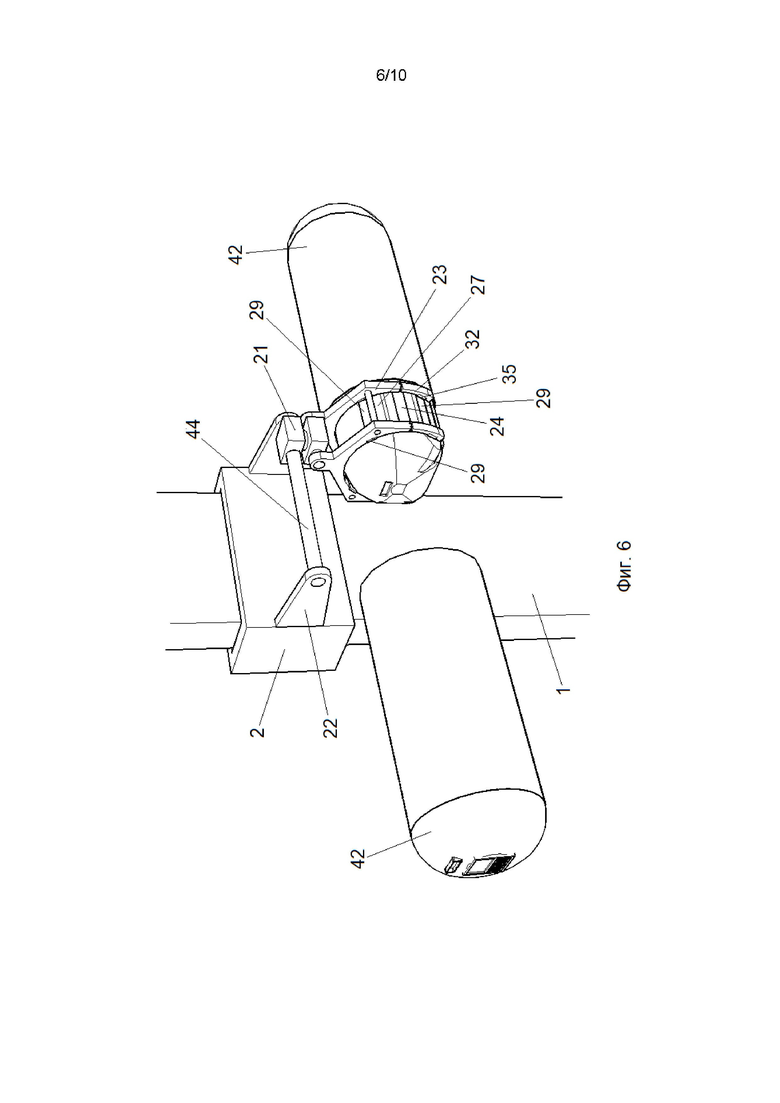
на фиг. 6 показан в изометрии манипулятор и пункт приема и отправки на этаже, момент, когда капсула въезжает в пункт приема или выезжает из него;
на фиг. 7 представлен вид в изометрии вертикального транспортного пути с этажными перекрытиями, опорами для пунктов выдачи и приемки, перекрытия и опоры для ясности отображены прозрачными;
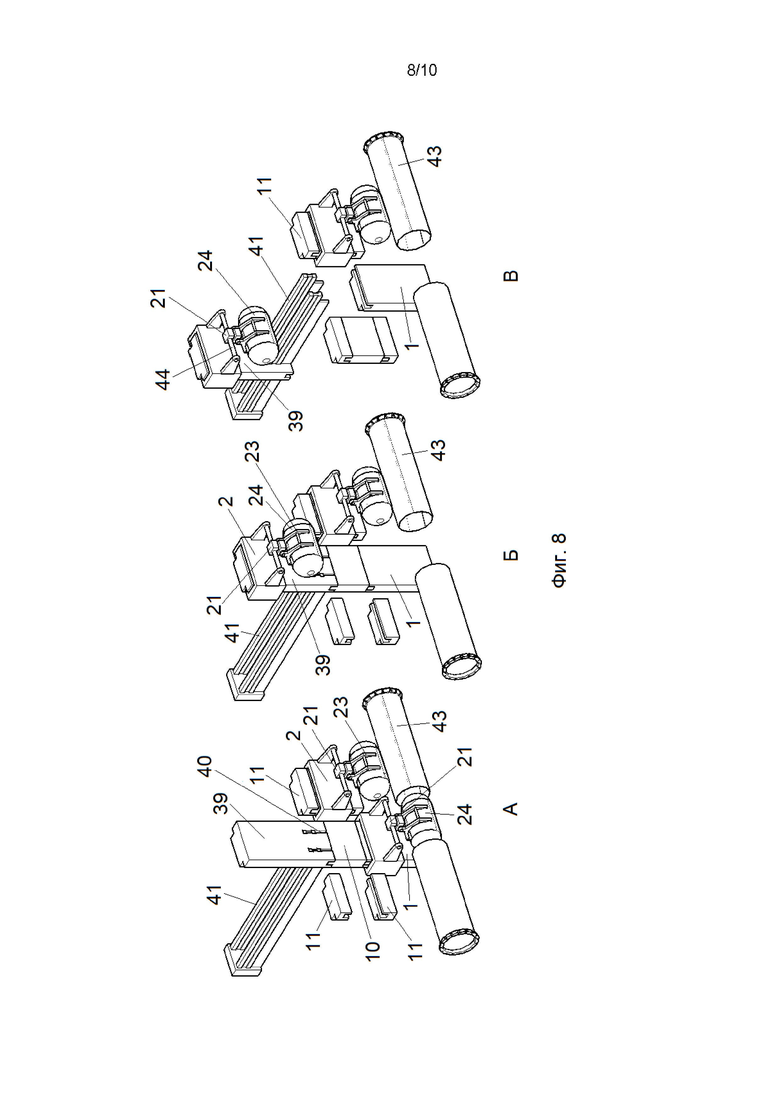
на фиг. 8 представлен вертикальный транспортный путь со станиной для горизонтального перемещения с последовательностью работы, без пунктов приема и отправки для лучшего обзора конструкции;
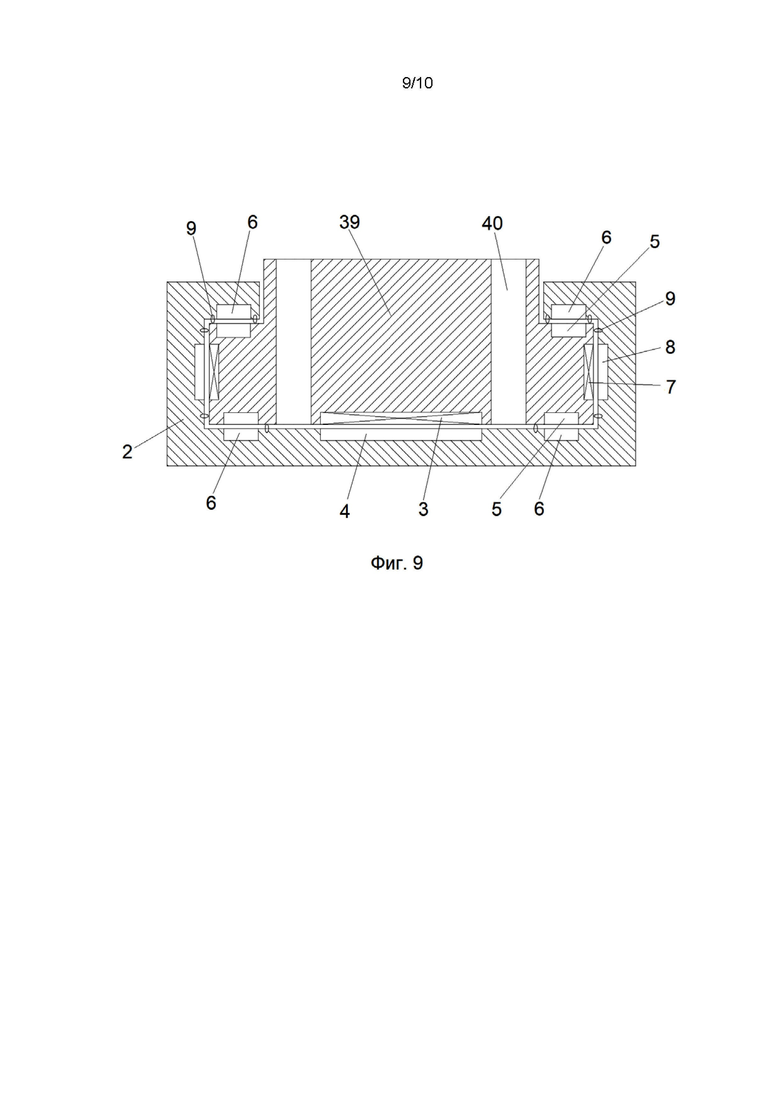
на фиг. 9 представлен поперечный разрез подвижного участка пути с кареткой и направляющими для горизонтального перемещения по станине;
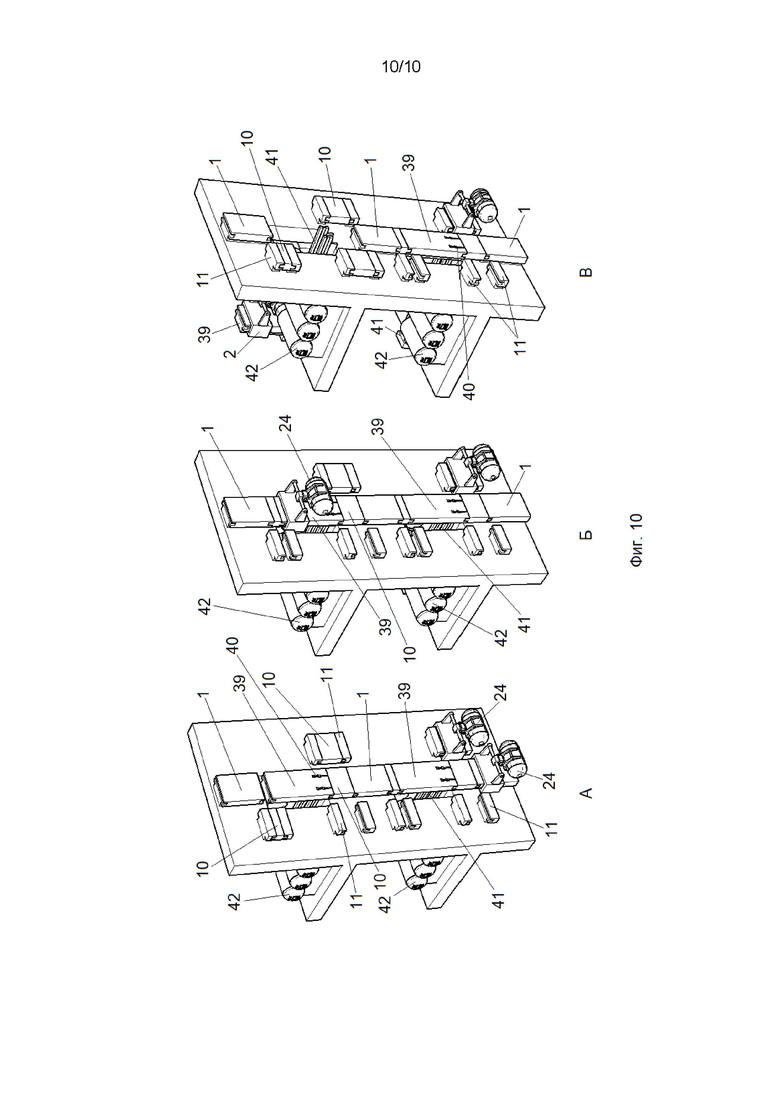
на фиг. 10 представлен вертикальный транспортный путь со станиной для горизонтального перемещения с последовательностью работы, с этажными перекрытиями, стеной, пунктами приема и отправки.
Технический результат, заключается в упрощении конструкции, ее удешевлении, снижение количества трущихся деталей, расширение функциональных и эксплуатационных возможностей за счет обеспечения доставки груза в пункты выдачи и отправки в высотных зданиях в городской инфраструктуре с повышенной скоростью и безопасностью, достигается в вертикальном магнитолевитационном транспортном пути, содержащем монорельс 1 (фиг. 1), подвижную каретку 2, статор 3 линейного электродвигателя, взаимодействующий с ротором 4 каретки 2, постоянные магниты 5 монорельса 1 и каретки 2, взаимодействующие одноименными полюсами, электромагнит 7 боковой стабилизации, взаимодействующий с постоянным магнитом 8 каретки 2, в свою очередь в каретке 2 установлены страховочные ролики 9 с тормозной системой, отличающийся тем, что содержит подвижный участок 10 (фиг. 2) и фиксирующие элементы 11 (фиг. 3), расположенные справа и слева от монорельса 1 (фиг. 4), а также сверху и снизу относительно подвижного участка 10, который взаимодействует с монорельсом 1 и фиксирующими элементами 11, при этом подвижный участок 10 (фиг. 2 и фиг. 3) сверху и снизу содержит ротор 12 линейного двигателя, взаимодействующий со статором 13 из постоянных магнитов монорельса 1 и статором 14 (фиг. 3) фиксирующего элемента 11, направляющие 15 (фиг. 2), взаимодействующие с направляющими 16 монорельса 1, и направляющими 17 (фиг. 3) фиксирующего элемента 11, расположенного в стороне от монорельса 1, монорельс 1 (фиг. 2) в месте разрыва содержит аварийные ролики 18 с тормозами, взаимодействующими с поверхностью подвижного участка 10. Фиксирующий элемент 11 (фиг. 3) содержит ролики 19 с тормозами, причем между подвижным участком 10, монорельсом 1 и фиксирующим элементом 11 для работы линейного двигателя обеспечен воздушный зазор 20.
Вертикальный магнитолевитационный транспортный путь отличается тем, что каретка 2 (фиг. 4 и 5) содержит манипулятор 21, крепеж 22, связывающий каретку 2 с манипулятором 21, захват 23 (фиг. 5) для капсулы 24, который содержит статор 25 линейного двигателя, взаимодействующий с ротором 26 капсулы 24, постоянный магнит 27, взаимодействующий с постоянным магнитом 28 капсулы 24 одноименным полюсом, постоянный магнит 29, взаимодействующий с электромагнитом 30 капсулы 24, аварийный ролик 31 с тормозной системой, и рычаг 32, связанный шарнирным механизмом 33 с захватом 23, при этом рычаг 32, связанный шарнирным механизмом 33 с захватом 23 и линейным механизмом 34, содержит постоянный магнит 35, взаимодействующий с постоянным магнитом 36 капсулы 24 одноименным полюсом, постоянный магнит 37, взаимодействующий с электромагнитом 38 капсулы 24, и аварийные ролики 31 с тормозной системой.
Вертикальный магнитолевитационный транспортный путь содержит подвижный участок 39 (фиг. 8 и 10) с поперечными направляющими 40, взаимодействующими со станиной 41 (фиг. 8 и 10) для горизонтального перемещения посредством электродвигателя внутри здания.
Работает вертикальный магнитолевитационный транспортный путь 1 (фиг. 1) следующим образом.
Постоянные магниты 5 и 6 взаимодействуя одноименными полюсами обеспечивают вертикальную магнитную левитацию каретки 2. Электромагнит 7 пути 1, взаимодействуя с постоянным магнитом 8 обеспечивает поперечную устойчивость каретки 2. Статор 3 линейного двигателя транспортного пути 1 взаимодействуя с ротором 4 каретки 2 перемещает ее вверх и вниз.
Подвижной участок 10 (фиг. 2) перемещается поперек пути 1 за счет статора 13 и ротора 12 линейного двигателя, установленного на пути 1, когда участок 10 входит в направлявшие 17 (фиг. 3) элемента 11 то включается статор 14 линейного двигателя, взаимодействующий с ротором 12 участка 10, элемента 11, работают два линейных двигателя одновременно. Когда участок 10 выходит из пути 1, то линейный двигатель пути 1 отключается и участок 10 перемещается за счет статора 14 линейного двигателя, взаимодействующего с ротором 12, элемента 11.
Когда каретка 2 (фиг. 6) с манипулятором 21 доставляет капсулу 24 до пункта 42 или транспортного трубопровода 43, то манипулятор 21 посредством линейного двигателя, переместится по оси 44. Капсула 24 может выезжать из захвата 23, и также въезжать в него посредством линейного двигателя трассы 43 или пункта выдачи и отправки. Рычаги 32 (фиг. 5) контролируют зазор между капсулой 24 и роликом 39, чтобы во время аварийного отключения электроэнергии ролик соприкасался с капсулой и мог надежно тормозить и удерживать ее на месте. Также захват 23 может расширится за счет рычагов 32 для въезда капсулы 24 если она имеет, по какой-то причине, измененную геометрию.
Магнитная левитация капсулы 24 (фиг. 5) в захвате 23 обеспечивается взаимодействием постоянного магнита 35 и постоянного магнита 36 одноименными полюсами, а также магнитами 27 и 28. Поперечную стабилизацию капсулы 24 обеспечивает ее электромагнит 30 взаимодействующий с постоянным магнитом 29 захвата 23, и электромагнит 38 капсулы 24 взаимодействующий с постоянным магнитом 37 захвата 23. Перемещение в захвате 23 обеспечивает статор 25 взаимодействуя с ротором 26 капсулы 24. Статическая фиксация капсулы 24 происходит посредством роликов 31 с тормозной системой, а также посредством подачи тока нужного параметра на статор 25. Ролики 31 обеспечивают надежность фиксации при отключении электричества и не дают элементам капсулы 24 прикасаться к элементам захвата 23.
Для горизонтального перемещения каретки 2 с манипулятором 21 капсул 24 (фиг. 8 и 10) используется участок 39 (фиг. 8, 9 и 10) содержащий направляющую 40 взаимодействующую со станиной 41 (фиг. 8 и 10) по которой перемещается горизонтально участок 39 посредством электродвигателя (не отображен графически), и развозит капсулы 24 в пункты 42 приема и отправки. Подача капсулы 24 из пункта 42 приема и выдачи осуществляется в обратном порядке.
На случай отключения электричества предусмотрены ролики 9 (фиг. 1) каретки 2 с тормозами, которые срабатывают при отключении электричества. Также, когда отключается электричество, то катушки статора 3 и электромагнита 7 коротко замыкаются, создавая магнитное сопротивление. В этом случае каретка 2 будет медленно отпускаться вниз, в зависимости от веса груза скорость будет отличаться. Когда каретка 2 (фиг. 4В) опустится до участка 10, аварийный аккумулятор сдвинет в сторону участок 10 (фиг. 4Б) вместе кареткой 2 и зафиксирует их в элементах 11. Если все элементы 11 заняты, то каретка 2 медленно доедет до нижнего барьера и остановиться, но это если не сработают тормоза роликов 9. Элементы 11 можно использовать как депо для ожидания вызова капсулы 24, для разъезда кареток 2, когда на монорельсе 1 не одна каретка 2, для аварийной фиксации каретки 2.
Ролики 9 (фиг. 1) с тормозами обеспечивают аварийную остановку каретки 2, во время отключения электричества и контролируют зазор между монорельсом 1 и кареткой 2. Ролики 19 (фиг. 3) с тормозами обеспечивают аварийную остановку подвижного участка 10, во время отключения электричества и контролируют зазор 20. Если электроэнергия отключилась, то сработают тормоза роликов 9 и 19 до включения электричества. Если есть аварийный аккумулятор, то он доведет операцию до устойчивого положения кареток 2 находящихся на монорельсе 1. Если нет аварийного питания, то каретки 2 зафиксируются на месте пребывания, после включения электричества, все каретки 2 (фиг. 7) продолжат движение по адресной программе.
Когда капсула 24 (фиг. 4А) выезжает из трубопровода 43, то она фактически въезжает в захват 23 за счет линейного двигателя транспортного пути 43, Взаимодействие статора 25 с ротором 26 (фиг. 5) линейного двигателя доводит капсулу 24 до середины захвата 23 (фиг. 4А) и фиксирует ее на месте. Затем каретка 2 с манипулятором 21 поднимает капсулу 24 наверх по монорельсе 1 (фиг. 4Б). На нужном этаже манипулятор 21 (фиг. 4В) подает капсулу 24 (фиг. 6) в пункт 42 приема и отправки. Выгрузка капсулы 24 из захвата 23 манипулятора 21 в транспортный трубопровод 43 производится в обратном порядке.
Страховка от падения каретки с манипулятором устроена в два уровня, когда отключается электричество и включается аварийный аккумулятор, второй, когда отключается электричество и нет аварийного питания. Если не сработают тормоза роликов, то сработают короткозамкнутые катушки линейного двигателя и электромагнитов. Вертикальный магнитолевитационный путь может безопасно использоваться в грузовых перевозках в высотных и подземных сооружениях совместно с магнитолевитационной транспортной системой.


Изобретение относится к грузовому транспорту на магнитном подвесе и предназначено для доставки грузов в высотные и подземные сооружения в вертикальном положении. Вертикальный магнитолевитационный транспортный путь на магнитном подвесе содержит монорельс и подвижную каретку с манипулятором, статор линейного электродвигателя, взаимодействующий с ротором каретки, постоянные магниты монорельса и каретки, электромагнит боковой стабилизации. Вертикальный магнитолевитационный транспортный путь содержит также подвижный участок и фиксирующие элементы, расположенные справа и слева от монорельса, а также сверху и снизу относительно подвижного участка, который взаимодействует с монорельсом и фиксирующими элементами. Подвижный участок сверху и снизу содержит ротор линейного двигателя, взаимодействующий со статором из постоянных магнитов монорельса и статором фиксирующего элемента, направляющие, взаимодействующие с направляющими монорельса, и направляющими фиксирующего элемента, расположенного в стороне от монорельса. Монорельс в месте разрыва содержит аварийные ролики с тормозами, взаимодействующими с поверхностью подвижного участка, а фиксирующий элемент содержит ролики с тормозами. Технический результат заключается в упрощении конструкции, её удешевлении, снижении количества трущихся деталей, а также расширении функциональных и эксплуатационных возможностей. 2 з.п. ф-лы, 10 ил.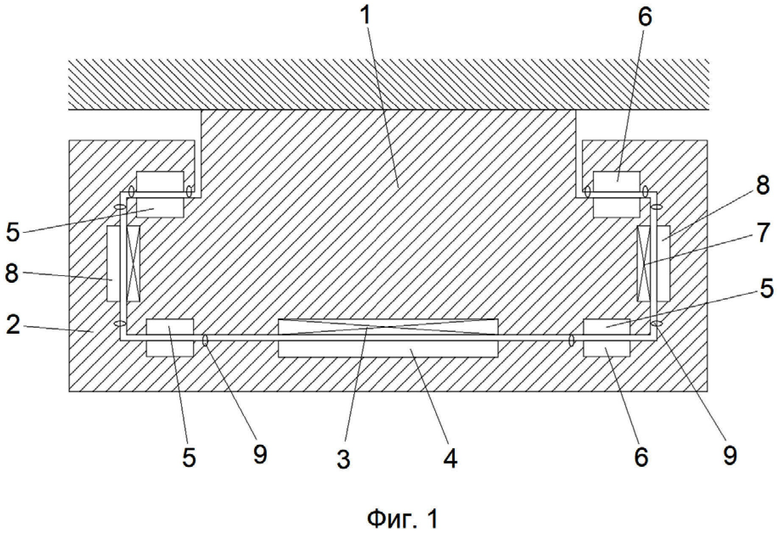
1. Вертикальный магнитолевитационный транспортный путь, содержащий монорельс, подвижную каретку, статор линейного электродвигателя, взаимодействующий с ротором каретки, постоянные магниты монорельса и каретки, взаимодействующие одноименными полюсами, электромагнит боковой стабилизации, взаимодействующий с постоянным магнитом каретки, в свою очередь в каретке установлены страховочные ролики с тормозной системой, отличающийся тем, что содержит подвижный участок и фиксирующие элементы, расположенные справа и слева от монорельса, а также сверху и снизу относительно подвижного участка, который взаимодействует с монорельсом и фиксирующими элементами, при этом подвижный участок сверху и снизу содержит ротор линейного двигателя, взаимодействующий со статором из постоянных магнитов монорельса и статором фиксирующего элемента, направляющие, взаимодействующие с направляющими монорельса, и направляющими фиксирующего элемента, расположенного в стороне от монорельса, монорельс в месте разрыва содержит аварийные ролики с тормозами, взаимодействующими с поверхностью подвижного участка, а фиксирующий элемент содержит ролики с тормозами, причем между подвижным участком, монорельсом и фиксирующим элементом для работы линейного двигателя обеспечен воздушный зазор.
2. Вертикальный магнитолевитационный транспортный путь по п. 1, отличающийся тем, что каретка содержит манипулятор, крепеж, связывающий каретку с манипулятором, захват для капсулы, который содержит статор линейного двигателя, взаимодействующий с ротором капсулы, постоянный магнит, взаимодействующий с постоянным магнитом капсулы одноименным полюсом, постоянный магнит, взаимодействующий с электромагнитом капсулы, аварийный ролик, и рычаг, связанный шарнирным механизмом с захватом, при этом рычаг, связанный шарнирным механизмом с захватом и линейным механизмом, содержит постоянный магнит, взаимодействующий с постоянным магнитом капсулы одноименным полюсом, постоянный магнит, взаимодействующий с электромагнитом капсулы, и аварийные ролики с тормозной системой.
3. Вертикальный магнитолевитационный транспортный путь по п. 1, отличающийся тем, что содержит подвижный участок с поперечными направляющими, взаимодействующими со станиной для горизонтального перемещения посредством электродвигателя внутри здания.
| JP H10236648 A, 08.09.1998 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| ШАХТНЫЙ ПОДЪЕМНИК | 1991 |
|
RU2035375C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕКТРОДОВ ЭЛЕКТРОФИЛЬТРОВ | 1998 |
|
RU2131301C1 |
| US 5501295 A1, 26.03.1996 | |||
| ЛИФТ С ЭЛЕКТРОПРИВОДОМ ПОДЪЕМА ЭЛЕКТРИЧЕСКИМ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2630011C2 |
| US 5021695 A1, 04.06.1991. | |||

