Изобретение относится к области магнитолевитационных трубопроводных транспортных систем, в частности, к конструкции устройства стрелочного перевода без механических и подвижных узлов. Стрелочный перевод, это место разветвления транспортного пути на две разных линии или соединение двух линий в одну, содержит входной участок, стрелку, ответвленный участок и прямой участок.
В результате обеспечивается магнитная левитация, боковая стабилизация, подъем или опускание на другую линию без снижения скорости подвижного состава.
Не известен магнитолевитационный трубопроводный стрелочный перевод, без механических и подвижных деталей, работающий вертикально, т.е. переключается вверх или вниз. Все существующие стрелочные переводы устанавливаются горизонтально. Патентов на вертикально переключающийся трубопроводный стрелочный перевод не обнаружено.
Известно изобретение, патент RU 2745747, автор Адвакатов А.А., относится к области магнитолевитационной транспортной технологии, а именно к конструкции устройства стрелочного перевода без механических и подвижных узлов. Стрелочный перевод место разветвления транспортного пути на две разных линии или соединение двух линий в одну, без механических и подвижных узлов, содержит входной участок, разделитель и участки разветвления, когда работает на соединение в одну линию, то стрелочный перевод содержит разветвления, соединитель и выход в одну линию. В результате обеспечивается магнитная левитация, боковая стабилизация и управление поворотами на стрелочном переводе без механических и подвижных узлов в любой плоскости координат, с электроэнергией на пути и без электроэнергии на пути, когда подвижной состав двигается по инерции.
Это изобретение, как и все конструкции горизонтальных переводов, переключаются налево и направо, имеют недостаток, для того чтобы осуществить перевод на другую линию, подвижному составу необходимо значительно сбросить скорость.
Изобретение направлено на устранение этого недостатка.
1. Техническое решение достигается посредством вертикального магнитолевитационного трубопроводного стрелочного перевода, без механических и подвижных узлов, работающий в разных направлениях, обеспечивающий ответвление транспортного участка, соединение транспортных участков в один и прямой проезд, содержащий входящий участок, стрелку, ответвленный участок и прямой участок, в свою очередь, все транспортные участки содержат статор линейного двигателя, установленный в нижней части, взаимодействующий с ротором, установленным внизу подвижного состава, и создающим линейную тягу, магниты горизонтальной левитации, установленные в нижней части, взаимодействующие одинаковыми полюсами с магнитом, установленным внизу подвижного состава, магниты поперечной стабилизации, установленные на боковых стенах, взаимодействующие с их ответной частью, установленной на боковых частях подвижного состава, отличающийся тем, что стрелка, в верхней части, содержит катушки линейного двигателя и катушки электромагнитов расположенных поочередно, установленные криволинейно под углом, постепенно поднимаясь вверх от входящего участка до ответвленного участка, катушки линейного двигателя, взаимодействующие с ротором подвижного состава, создают линейную тягу, а катушки электромагнитов, взаимодействующие с тем же ротором подвижного состава, генерируют кулоновские силы притяжения удерживая ротор из ферромагнитного сплава с подвижным составом на расстоянии контролируемым датчиком.
2. Вертикальный магнитолевитационный трубопроводный стрелочный перевод, без механических узлов и деталей по п.1, отличающийся тем, что стрелка на боковых стенах, содержит магниты поперечной стабилизации, установленные параллельно катушкам линейного двигателя и катушкам электромагнитов, повторяя контур катушек линейного двигателя и катушек электромагнитов, взаимодействующие с ответной частью, установленной на боковых частях подвижного состава 8 посредством кулоновской силы притяжения или отталкивания.
3. Вертикальный магнитолевитационный трубопроводный стрелочный перевод, без механических узлов и деталей по п.1, отличающийся тем, что входящий участок, со стороны транспортного пути, содержит, у каждой катушки линейного двигателя и у каждой катушки электромагнитов, датчики контроля расстояния до ротора, сначала датчики задают расстояние до ротора большее, а затем постепенно его уменьшают, обеспечивая постепенный подъем подвижного состава.
4. Вертикальный магнитолевитационный трубопроводный стрелочный перевод, без механических узлов и деталей по п.1, отличающийся тем, что ответвленный участок, со стороны стрелки, содержит, у каждой катушки линейного двигателя и у каждой катушки электромагнитов, датчики контроля расстояния до ротора, сначала датчики задают расстояние до ротора меньшее, а затем постепенно его увеличивают, обеспечивая постепенный спуск подвижного состава на нижнюю магнитную схему.
Сущность заявленного технического решения поясняется чертежами 1-7, где:
на фиг.1 представлена схема вертикального магнитолевитационного стрелочного перевода, вид сбоку, ответвленный путь установлен в верхней части трубопроводного транспортного пути, стрелки указывают направление движения подвижного состава для ответвления на другую линию;
на фиг.2 представлена схема вертикального магнитолевитационного стрелочного перевода, вид сбоку, ответвленный путь установлен в нижней части трубопроводного транспортного пути, стрелки указывают направление движения подвижного состава для соединения в одну транспортную линию;
на фиг.3 изображен вертикальный магнитолевитационный стрелочный перевод, вид сбоку, в момент перевода подвижного состава на ответвленный путь;
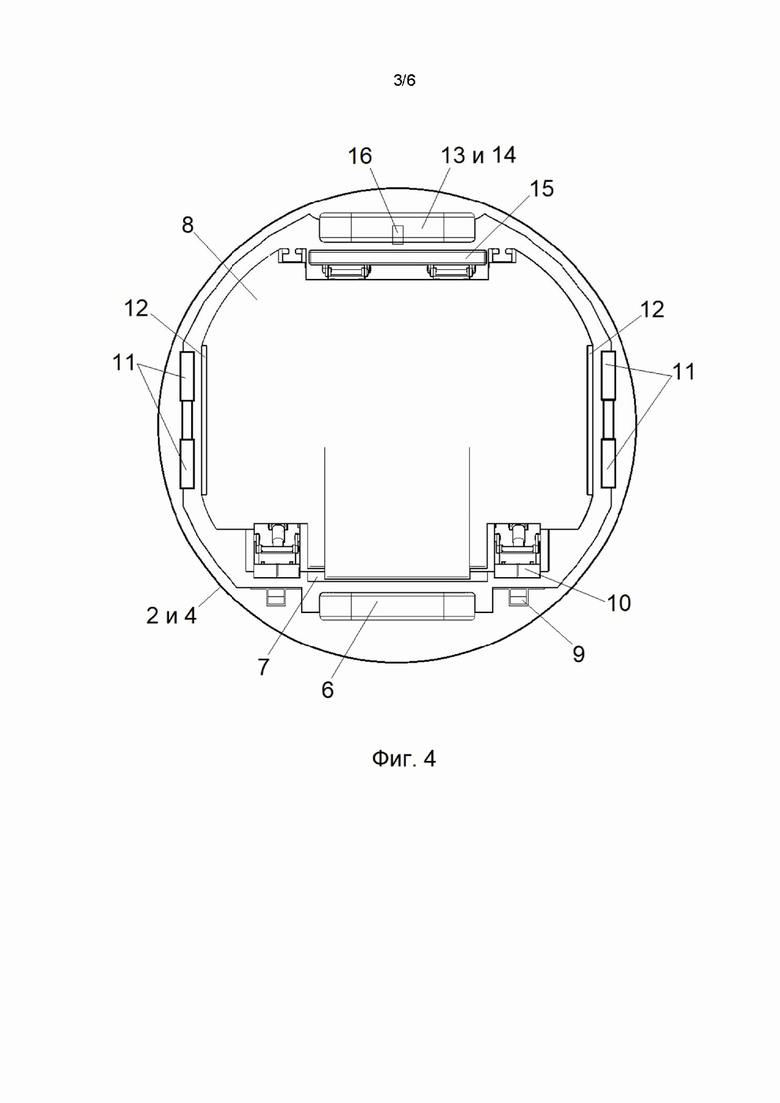
на фиг.4 изображен поперечный разрез входного участка и ответвленного участка вертикального магнитолевитационного стрелочного перевода с подвижным составом;
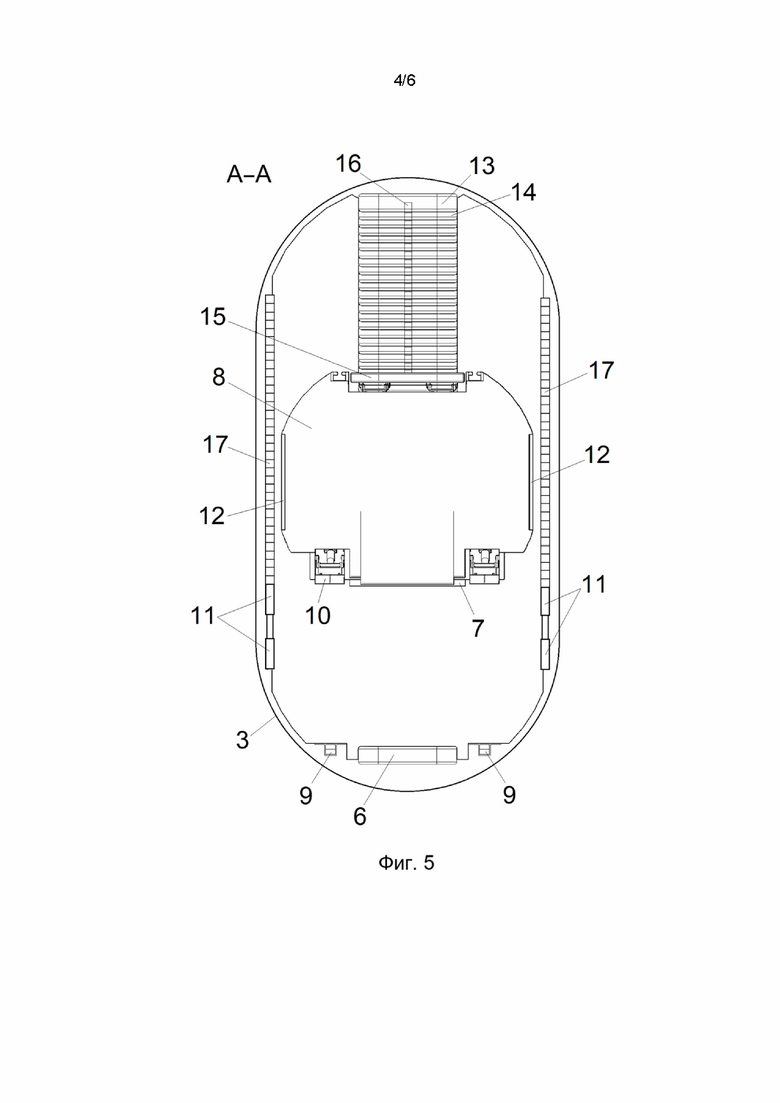
на фиг.5 изображен разрез А-А стрелки вертикального магнитолевитационного стрелочного перевода с подвижным составом в момент перевода на другой путь;
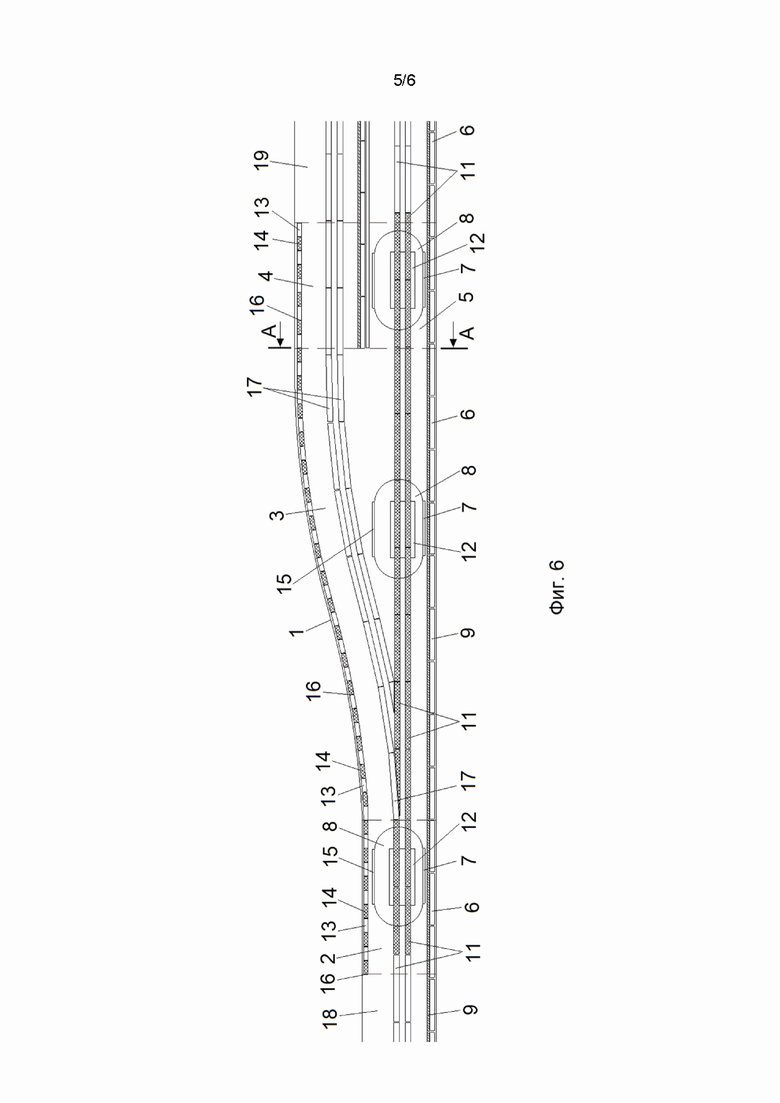
на фиг.6 изображен вертикальный магнитолевитационный стрелочный перевод, вид сбоку, в момент проезда по прямому транспортному пути без перевода на другую линию;
на фиг.7 показан общий вид вертикального магнитолевитационного стрелочного перевода в конструкции трубопроводного транспортного пути.
1. Техническое решение достигается посредством вертикального магнитолевитационного трубопроводного стрелочного перевода 1 (фиг 1 и фиг. 2), без механических и подвижных узлов, работающий в разных направлениях, обеспечивающий ответвление транспортного участка, соединение транспортных участков в один и прямой проезд, содержащий входящий участок 2, стрелку 3, ответвленный участок 4 и прямой участок 5, в свою очередь, все транспортные участки 2, 3, 4, 5, содержат статор 6 линейного двигателя, установленный в нижней части, взаимодействующий с ротором 7, установленным внизу подвижного состава 8, и создающим линейную тягу, магниты 9 (фиг. 3 и фиг. 4) горизонтальной левитации, установленные в нижней части, взаимодействующие одинаковыми полюсами с магнитом 10 (фиг. 4), установленным внизу подвижного состава 8, магниты 11 (фиг. 3 и фиг. 4) поперечной стабилизации, установленные на боковых стенах, взаимодействующие с их ответной частью 12, установленной на боковых частях подвижного состава 8, отличающийся тем, что стрелка 3 (фиг.3 и фиг. 5), в верхней части, содержит катушки 13 линейного двигателя и катушки 14 электромагнитов расположенных поочередно, установленные криволинейно под углом, постепенно поднимаясь вверх от входящего участка 2 (фиг. 3) до ответвленного участка 4, катушки 13 линейного двигателя, взаимодействующие с ротором 15 подвижного состава 8, создают линейную тягу, а катушки 14 электромагнитов, взаимодействующие с тем же ротором 15 подвижного состава 8, генерируют кулоновские силы притяжения удерживая ротор 15 из ферромагнитного сплава с подвижным составом 8 на расстоянии контролируемым датчиком 16.
2. Вертикальный магнитолевитационный трубопроводный стрелочный перевод, без механических узлов и деталей по п.1, отличающийся тем, что стрелка 3 на боковых стенах, содержит магниты 17 поперечной стабилизации, установленные параллельно катушкам 13 линейного двигателя и катушкам 14 электромагнитов, повторяя контур катушек 13 линейного двигателя и катушек 14 электромагнитов, взаимодействующие с ответной частью 12, установленной на боковых частях подвижного состава 8 посредством кулоновской силы притяжения или отталкивания.
3. Вертикальный магнитолевитационный трубопроводный стрелочный перевод, без механических узлов и деталей по п.1, отличающийся тем, что входящий участок 2, со стороны транспортного пути 18, содержит, у каждой катушки 13 линейного двигателя и у каждой катушки 14 электромагнитов, датчики 16 контроля расстояния до ротора 15, сначала датчики 16 задают расстояние до ротора 15 большее, а затем постепенно его уменьшают, обеспечивая постепенный подъем подвижного состава 8.
4. Вертикальный магнитолевитационный трубопроводный стрелочный перевод, без механических узлов и деталей по п.1, отличающийся тем, что ответвленный участок 4, со стороны стрелки 3, содержит, у каждой катушки 13 линейного двигателя и у каждой катушки 14 электромагнитов, датчики 16 контроля расстояния до ротора 15, сначала датчики 16 задают расстояние до ротора 15 меньшее, а затем постепенно его увеличивают, обеспечивая постепенный спуск подвижного состава 8 на нижнюю магнитную схему.
Изобретение вертикальный магнитолевитационный трубопроводный стрелочный перевод 1 (фиг. 1, фиг. 2 и фиг. 3) без механических и подвижных узлов, содержащий входящий участок 2, стрелку 3, ответвленный участок 4 и прямой участок 5, работает в обоих направлениях, переводит подвижной состав 8 на другую линию или соединяет две транспортных линии в один трубопроводный транспортный путь на малых и высоких скоростных режимах.
Стрелочный перевод 1 (фиг. 1, фиг. 2 и фиг. 3) выполнен так, чтобы подвижной состав 8 мог въезжать во входной участок 2 из другой магнитной схемы, где линейный двигатель расположен внизу. Например, линейные двигатели в малых трубопроводных системах, это катушки, расположенные друг от друга на расстоянии, установленные внизу. Катушка линейного двигателя толкает подвижной состав до другой катушки, как бы перебрасывая его, при этом достигается равномерное конвейерное движение, ссылка на просмотр примера: https://www.magway.com/our-people. Если линейный двигатель по бокам транспортного пути, то он создает линейную тягу, поперечную стабилизацию и обеспечивает частичную левитацию (разгружает вес подвижного состава на 15-30%, удерживая его между катушками, расположенными друг против друга). Магнитный подвес тоже может быть разным и устроен в разных местах трубопровода и подвижного состава. Многовариантность создается за счет роторов 7, 15 и 12 (ответная часть электромагнита и линейного двигателя) установленных со всех сторон подвижного состава.
Во входящем участке 2 (фиг. 3), стрелке 3 и ответвленном участке 4 технология устройства катушек 13 линейного двигателя и катушек 14 электромагнитов, такая же как в пассажирском маглев Transrapid, отличается тем, что в Transrapid ответная часть статора линейного двигателя и магниты подъема подвижного состава, являются электромагнитными, выполнены модульно и в два ряда. Для их питания используются бортовые аккумуляторы на подвижном составе, которые подзаряжаются на каждой остановке.
Работает вертикальный магнитолевитационный стрелочный перевод 1 (фиг. 3) следующим образом.
Когда необходимо перевести подвижной состав 8 на ответвленный участок 4, то включаются: катушки 13 линейного двигателя катушки 14 электромагнитов во входящем участке 2; стрелке 3 и ответвленном участке 4, катушки 11 во входящем участке 2, катушки 17 поперечной стабилизации в стрелке 3 и катушки 11 в ответвленном участке 4, создается линейная тяга, магнитная левитация и поперечная стабилизация. Единично или эшелоном, подвижной состав 8 доезжает по прямому путепроводу 18 до входящего участка 2 (фиг. 3 и фиг. 4) посредством катушек 6 линейного двигателя взаимодействующих с ротором 7. В момент вхождения во входящий участок 2 параметр расстояния датчика 16 от катушек 13 и 14 сначала большой, а затем уменьшается, обеспечивая постепенный подъем подвижного состава 8. Когда ротор 15 с подвижным составом 8, полностью въехал во входящий участок 2, то магниты 13 удерживают подвижной состав 8 посредством притягивания ротора 15 на заданном расстоянии. Входящий участок 2 достаточно длинный, главная его задача перевести подвижной состав 8 в магнитную схему стрелки 3 и ответвленного участка 4 и стабилизировать подвижной состав 8 после перехода из прямого транспортного пути 18 во входящий участок 2. В момент вхождения ответной части 12, подвижного состава 8, во входящий участок 2 электромагниты 11 стабилизируют поперечную устойчивость подвижного состава 8.
Когда подвижной состав 8 въезжает в стрелку 3, его удерживают посредством притяжения не только магниты 13, но и катушки линейного двигателя (так работают линейные двигатели по отношению к ферромагнитным металлам, кроме этого, они создают поперечную стабилизацию), разгружая на 50 - 90% вес подвижного состава 8 и катушки 17 разгружают на 15-30% вес подвижного состава 8, когда ответная часть 12 находится между катушками 11 и 17, то электромагниты стремятся установить ответную часть 12 (ротор) по линейному центру катушек 11 и 17. Работают катушки 13, 14, 11 и 17 независимо друг от друга. Подвижной состав проезжает стрелку 3 стабилизированным горизонтально и вертикально, его не сбросят на радиусах и переходе на другой радиус, с катушек 13, инерционные силы, так как есть еще две поддерживающие и стабилизирующие подсистемы.
Когда подвижной состав 2 въезжает в ответвленный участок 4, то подвижной состав остается левитировать на катушках 14 электромагнитов, взаимодействуя с ротором 15. Постоянные магниты 10 (фиг. 4) подвижного состава 8 находятся на расстоянии от магнитов 9 (фиг. 3 и фиг. 4) транспортного пути, чтобы магнитные поля не столкнулись при вхождении, так как отталкиваются одинаковыми полюсами. Расстояние от катушек 6 линейного двигателя до ротора 7 такое, на котором невозможно развить полную мощность тяги линейного двигателя. Подвижной состав 8 в ответвленном участке 4 постепенно отпускается на магниты 9 транспортного пути. Либо за счет ходовой, которая поднимает магниты 10, а затем отпускает, или за счет постоянного увеличения параметра расстояния на датчике 16 ограничения расстояния от катушек 13 и 14 до ротора 15. Когда подвижной состав 8, с магнитами 10 (фиг. 4), опускается на магниты 9, катушки 6 (фиг. 3) линейного двигателя включаются, будучи синхронизированы с катушками 13 линейного двигателя. Когда подвижной состав 8 полностью перешел на нижний магнитный путь 9, он продолжает определенное расстояние двигателя с той же скоростью. Когда все единицы подвижного состава 8 проехали входящий участок 2 и стрелку 3, то катушки 13 и 14 отключаются, и в этот же миг, другой подвижной состав 8 проезжает прямо. Так обеспечивается конвейерное движение подвижного состава 8 на всех участках транспортного пути. Управляется процесс программным обеспеченьем. В момент, когда все единицы подвижного состава 8 прошли стрелку 3 и въехали в ответвленный участок 4 их скоростной режим сохраняется. Когда подвижной состав 8 въезжает в участок 19 (фиг. 3 и фиг. 7) транспортного пути, начинается замедление скорости, чтобы провернуть направо или налево на лояльном скоростном режиме, или, например, подвижной состав 8 (фиг. 3) на той же скорости 550 км/ч движется по дуге радиусом 8000 км. вправо или влево. Длина стрелки 3 зависит от скоростного режима участка трассы.
Скорость влияет только на потребление электроэнергии, чем медленнее проезжает стрелочный перевод 1 (фиг. 3) подвижной состав 8, тем больше потребление электроэнергии. Геометрия пути у стрелки 3 должна иметь параметры, которые зависят от скорости прохождения стрелочного перевода 1. Например, для грузового варианта, диаметр трубопроводного путепровода 650 мм, скоростной режим 550 км/ч, длина стрелки 3 будет 153 метра, ее верхний и нижний радиусы равны 8000 км., угол подъема 0,26 градуса, подъем подвижного состава осуществляется на 700 мм. за одну секунду. Самый экономичный вариант использования такого вертикального магнитолевитационного стрелочного перевода 1, это прохождение его со скоростью 550 км/ч. Вместе с тем, это практический порог скоростного режима, но проезжать стрелочный перевод можно на любой скорости ниже порогового значения. Стрелка 3, между двумя противоположными радиусами 8000 км, содержит прямолинейный участок для стабилизации подвижного состава 8, когда он из одного радиуса переезжает в противоположный радиус.
Когда подвижному составу 8 надо проехать прямо, то включаются катушки 6 линейного двигателя и катушки 11 (заштрихованные катушки 11 обозначают, что они включены) электромагнитов во входящем участке 2, стрелке 3 и в прямом участке 5. Катушки 6 линейного двигателя, взаимодействуют с ротором 7, создают линейную тягу, магниты 10 отталкиваясь от магнитов 9 разными полюсами, создают магнитную левитацию, катушки 11 электромагнитов взаимодействуя с ответной частью 12, создают поперечную устойчивость подвижного состава.
Для соединения двух транспортных трубопроводных линий в одну линию стрелочный перевод 1 (фиг. 3) работает в обратном порядке и имеет следующую последовательность: два входящих участка 4 и 5, стрелка 3, прямой участок 2. Отличается тем, что вхождение подвижного состава 8 в прямой участок 2 контролируется датчиками приближения и удаления, которые реагируют на каждую единицу подвижного состава 8. Это дает возможность избежать столкновения в стрелке 3.
При разделении одной транспортной линии на две линии или при соединении двух линий в одну, т.е. работа в разных направлениях, требует дополнительной электроэнергии для катушек 14 электромагнитов, для проезда без перевода на другую линию, дополнительная энергия не требуется.
Отключается стрелочный перевод 1 по этапам, сначала отключается входящий участок 2, как только последний подвижной состав 6 выедет из него. Затем также отключается стрелка 3 и ответвление пути 4.
Изобретение кратно увеличивает провозную способность транспортного трубопровода, подвижной состав может двигаться конвейерном режиме на высоких скоростях, не сложно организовать прием грузов без снижения скорости основного потока, посредством разветвления транспортных путей на загрузке и разгрузке.
Вертикальный магнитолевитационный стрелочный перевод, без механических и подвижных узлов, может применяться на всех магнитолевитационных видах трубопроводного транспорта.



Изобретение относится к области магнитолевитационных трубопроводных транспортных систем, а именно к конструкции устройства стрелочного перевода, установленного вертикально, без механических и подвижных узлов. Стрелочный перевод содержит входящий участок, стрелку, ответвленный участок и прямой участок и работает как на соединение в одну линию, так и на разветвление на две линии. Входящий участок, стрелка и ответвленный участок в верхней части содержат катушки линейного двигателя и катушки электромагнитов, расположенных поочередно, установленные криволинейно под углом, постепенно поднимаясь вверх от входящего участка до ответвленного участка. Катушки линейного двигателя, взаимодействующие с ротором подвижного состава, создают линейную тягу. Катушки электромагнитов, взаимодействующие с тем же ротором подвижного состава, генерируют кулоновские силы притяжения, удерживая ротор из ферромагнитного сплава с подвижным составом на расстоянии, контролируемом датчиком. В результате на высоких скоростях не нужно замедлять ход подвижного состава, чтобы перевести его на другую линию. 3 з.п. ф-лы, 7 ил.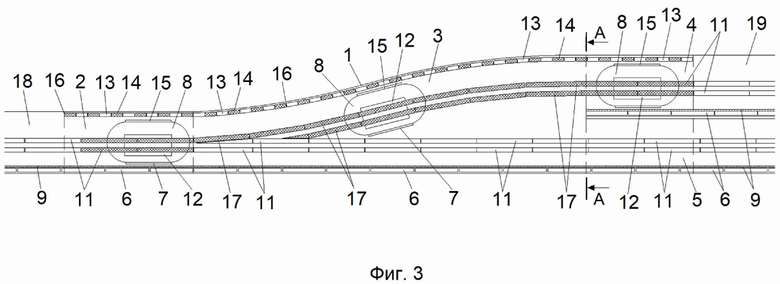
1. Вертикальный магнитолевитационный трубопроводный стрелочный перевод без механических и подвижных узлов, работающий в разных направлениях, обеспечивающий ответвление транспортного участка, соединение транспортных участков в один и прямой проезд, содержащий входящий участок, стрелку, ответвленный участок и прямой участок, в свою очередь, все транспортные участки содержат статор линейного двигателя, установленный в нижней части, взаимодействующий с ротором, установленным внизу подвижного состава и создающим линейную тягу, магниты горизонтальной левитации, установленные в нижней части, взаимодействующие одинаковыми полюсами с магнитом, установленным внизу подвижного состава, магниты поперечной стабилизации, установленные на боковых стенах, взаимодействующие с их ответной частью, установленной на боковых частях подвижного состава, отличающийся тем, что стрелка в верхней части содержит катушки линейного двигателя и катушки электромагнитов, расположенные поочередно, установленные криволинейно под углом, постепенно поднимаясь вверх от входящего участка до ответвленного участка, катушки линейного двигателя, взаимодействующие с ротором подвижного состава, создают линейную тягу, а катушки электромагнитов, взаимодействующие с тем же ротором подвижного состава, генерируют кулоновские силы притяжения, удерживая ротор из ферромагнитного сплава с подвижным составом на расстоянии, контролируемом датчиком.
2. Вертикальный магнитолевитационный трубопроводный стрелочный перевод без механических узлов и деталей по п. 1, отличающийся тем, что стрелка на боковых стенах содержит магниты поперечной стабилизации, установленные параллельно катушкам линейного двигателя и катушкам электромагнитов, повторяя контур катушек линейного двигателя и катушек электромагнитов, взаимодействующих с ответной частью, установленной на боковых частях подвижного состава посредством кулоновской силы притяжения или отталкивания.
3. Вертикальный магнитолевитационный трубопроводный стрелочный перевод без механических узлов и деталей по п. 1, отличающийся тем, что входящий участок, со стороны транспортного пути содержит у каждой катушки линейного двигателя и у каждой катушки электромагнитов датчики контроля расстояния до ротора, сначала датчики задают расстояние до ротора большее, а затем постепенно его уменьшают, обеспечивая постепенный подъем подвижного состава.
4. Вертикальный магнитолевитационный трубопроводный стрелочный перевод без механических узлов и деталей по п. 1, отличающийся тем, что ответвленный участок со стороны стрелки содержит у каждой катушки линейного двигателя и у каждой катушки электромагнитов датчики контроля расстояния до ротора, сначала датчики задают расстояние до ротора меньшее, а затем постепенно его увеличивают, обеспечивая постепенный спуск подвижного состава на нижнюю магнитную схему.
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| МАГНИТОЛЕВИТАЦИОННЫЙ СТРЕЛОЧНЫЙ ПЕРЕВОД БЕЗ МЕХАНИЧЕСКИХ И ПОДВИЖНЫХ УЗЛОВ | 2019 |
|
RU2745747C2 |
| Трубопроводная магнитолевитационная грузовая транспортная система | 2021 |
|
RU2755369C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

