Изобретение относится к системам автоматического складирования, приёма и передачи, сортировки оптовых грузов с последующей комплектацией их в одной таре по штучно с дальнейшей отправкой груза по адресу доставки.
Система переработки грузов без ручного труда, содержащая стеллажи для ящиков с оптовым грузом, транспортный путь для подвижного состава, кран-штабелёр для оптового груза, кран-штабелёр для штучной сортировки груза, конвейер для перемещения ящиков, стол-конвейер для постановки ящика под загрузку, манипулятор выгрузки порожнего ящика на конвейер, манипулятор для выгрузки из подвижного состава оптового груза в ящик и погрузки на кран-штабелёр, манипулятор выгрузки с крана-штабелёра и загрузки штучного груза в ящик на столе конвейера, манипулятор загрузки ящиков в подвижной состав и постановки на транспортный путь.
В результате обеспечивается автоматические приём и передача груза, его складирование, сортировка, формирование товарного и кассового чека, отправка груза по адресу без ручного труда. Увеличивается скорость сортировки и отправки груза по адресу назначения. Уменьшаются ошибки при сортировке груза, уменьшаются расходы на персонал, уходит ответственность за здоровье и гибель персонала, не нужны объединяющие коробки, целлофановые ленты и оборудование для консолидации груза на производственных предприятиях.
Известно изобретение способ и устройство для распределения пакетов или подобных транспортных грузов, патент RU 2337768, авторы Бреннер Бернхард, Щульц Юрген, Хоффманн Хартвиг, Хартвиг Андреас.
1. Способ распределения пакетов или подобных транспортных грузов, при котором, в частности, пакеты (1), подлежащие отправке от частных или коммерческих отправителей адресатам, собираются на сборном пункте (2), в котором пакеты (1) снабжаются пакетным кодом, содержащим адрес, номер пакета или другими данными, подвергаемыми электронной обработке, и после этого пакеты (1) распределяются и/или доставляются с помощью соответствующего транспортного средства, отличающийся тем, что собранные пакеты (1) направляются в HUB-центр, соединенный с одним или несколькими сборными пунктами (2), в котором соответствующие пакетные коды (С) с данными размеров (длина, ширина, высота, вес), геокоординатами (адресатов), а также идентификационными данными пакетов (1) объединяются в контролируемый маршрутный код (С') пакета и эти маршрутные коды всех пакетов (1') вводятся в центральный компьютер (7), таким образом, что после этого пакеты (1') с помощью выходного сигнала, сформированного программой центрального компьютера (7) созданного, а также динамически оптимизируемого планирования маршрута (D), приводятся в упорядоченную согласно зонам распределения последовательность, причем эта последовательность пакетов, а также маршрутные коды (С') пакетов при соответствующей распределению сортировке (6) вводятся в транспортные боксы (30), которые перегружаются на транспортное средство (29), и после этого пакеты (1') с помощью управляемого средствами навигации распределения (9) при автоматическом контроле доставляются адресату (41).
2. Способ по п.1, отличающийся тем, что расширенные маршрутные коды пакетов (С") с данными о размерах, геокоординатами, адресатами и идентификаторами определяются уже в сборном пункте (2) клиентом или непосредственно отправителем и далее направляются в центральный компьютер (7), после чего набор данных (С') проверяется в HUB-центре при вводе пакетов.
3. Способ по п.1, отличающийся тем, что несколько HUB-центров (HUB, HUB') управляются одним центральным компьютером (7).
4. Способ по п.1, отличающийся тем, что в HUB-центре пакеты (1') направляются при компьютерном управлении на промежуточный склад (14) в заданном определенном местоположении, в котором они хранятся в заданном временном окне, после чего пакеты (1') забираются в последовательности, соответствующей распределению.
5. Способ по п.1, отличающийся тем, что в соответствующих децентрализованных сборных пунктах (2) пакеты (1) снабжаются информационным машиночитаемым носителем, соответствующий пакетный код (С) в виде идентификационных данных регистрируется электронным способом и направляется в центральный компьютер (7), пакеты (1) от соответствующих сборных пунктов (2) в транспортном боксе транспортируются на общий перевалочный пункт (18), из которого пакеты (1) в неупорядоченном транспортном объеме (20) в транспортном боксе транспортируются в HUB-центр, в котором для полной проверки пакетов (1) пакетные коды (С) вводятся в компьютер HUB-центра, пакетные коды (С') с данными размеров пакета образуют электронным способом проверяемые маршрутные коды (С') пакетов, маршрутные коды (С') пакетов направляются в центральный компьютер (7) и обрабатываются в соответствии с динамически оптимизируемым планированием (D) маршрута, расчетные данные планирования оборота передаются в HUB-компьютер (4), и перевалочные пункты (18), которые также входят в систему планирования маршрута, пакеты (1') укладываются отсортированными в пригодном для транспорта расположении по системе LIFO, один или несколько образованных штабелей (6) пакетов забираются из HUB-центра, штабели (6) пакетов, размещенные в транспортных боксах, с помощью транспортного средства (8) транспортируются на перевалочный пункт (18), в котором штабели (6) пакетов передаются на распределительное транспортное средство (35), на это средство из центрального компьютера (7) передаются маршрутные коды (С') пакетов одного или нескольких находящихся в транспортных боксах штабелей (6) пакетов, после этого по распределительному маршруту, управляемому с помощью навигационной системы (9), пакеты (1') в соответствии с оптимальным планом (D) перевозки доставляются адресатам (41) и при этой доставке маршрутные коды (С') пакетов сравниваются с контрольными данными (42).
6. Способ по п.1, отличающийся тем, что динамически оптимизируемое планирование (D) маршрута осуществляется с помощью центрального компьютера (7) во временном окне, обеспечивающем возможность доставки пакетов (1') в день, следующий за днем регистрации.
7. Способ по любому из пп.1-6, отличающийся тем, что на месте децентрализованного сборного пункта (2) пакеты (1) принимаются службой доставки и снабжаются этой службой носителем информации с электронно считываемым кодом (С) пакета.
8. Способ по п.7, отличающийся тем, что пакеты (1) от сборного пункта (2) доставляются непосредственно в HUB-центр.
9. Способ по любому из пп.1-6 или 8, отличающийся тем, что центральный компьютер (7) снабжается программой, в которую вводятся полный адрес, содержащий соответствующие почтовые индексы, и текущие геокоординаты.
10. Способ по любому из пп.1-6 или 8, отличающийся тем, что программами центрального компьютера (7) задаются предельные величины размеров пакета, максимальное количество пакетов в одном штабеле (6) или количество доставляемых пакетов (1') в одном транспортном боксе и временное окно для доставки пакетов.
11. Устройство для распределения пакетов или подобных транспортных грузов, в частности для осуществления способа по пп.1-10, с HUB-центром, отличающееся тем, что устройство в области HUB-центра снабжено измерительным устройством (3; 21), имеющим соответствующие сенсорные устройства для регистрации идентификационных данных, размеров пакета (длины, ширины, высоты, веса), адресов и геокоординат, данные (С, С') измерений направляются в компьютер (4, 7), который присваивает эти данные пакетам (1') в качестве описывающих пакеты данных таким образом, что с помощью обработанных в компьютере (4, 7) данных (С, С') измерений в HUB-центре обеспечивается управление, при котором сортируемые пакеты (1') в упорядоченной последовательности (30) могут перегружаться, по меньшей мере, в одно транспортное средство (8; 29; 35), и пакеты (1') могут распределяться с помощью динамически оптимизируемого плана перевозки (D) на основе их расширенного набора данных (С').
12. Устройство по п.11, отличающееся тем, что для регистрации и идентификации пакетов по их пакетным кодам (С) на пакете в качестве носителя информации может быть закреплен транспондер, данные которого могут быть зарегистрированы в области HUB-центра, выполненного в качестве сортировочной площадки, причем HUB-центр оборудован HUB-компьютером (4), имеющим управление с программируемой памятью, а также соединяемым с центральным компьютером (7), который взаимодействует при обработке пакетов (1; 1') с соответствующими сенсорными устройствами (3), управляемым складским оборудованием (14), упаковочными устройствами (15, 16) и системой (35, 36) распределения на основе геокоординат (9).
13. Устройство по п.12, отличающееся тем, что HUB-центр в области входа на участок транспортного пути имеет сенсорные устройства, измеряющие пакеты, результаты измерения и сравнения которых в форме маршрутных кодов пакетов (наборов С' данных) могут вводиться в транспондер, образующий носитель информации, и в компьютер (4) с SPS-управлением (25), находящийся в HUB-центре.
14. Устройство по одному из пп.11-13, отличающееся тем, что HUB-центр в области выхода с участка (5) транспортного пути оборудован пакетирующим устройством (16) и несущим устройством, принимающим штабель пакетов (6), находящийся в транспортном боксе (30).
15. Устройство по п.14, отличающееся тем, что в качестве несущего устройства для отсортированного штабеля (6) пакетов предусмотрен транспортный бокс (30) со стандартными размерами.
16. Устройство по п.14, отличающееся тем, что отобранные пакеты (1') в области перед пакетирующим устройством (16) проходят через транспортную систему (15), распределяющую пакеты (1') для передачи в транспортные боксы (30).
17. Устройство по одному из пп.11-13, 16, отличающееся тем, что данные маршрутного кода (С') пакетов, сформированные в центральном компьютере (7) для соответствующего транспортного бокса (30), могут быть переданы с помощью радио, дискет или подобным образом на оконечное устройство (36), предусмотренное в распределительном транспортном средстве (35).
18. Устройство по п.17, отличающееся тем, что с оконечным устройством (36) может быть связана навигационная система, интегрированная в распределительное транспортное средство (35) или другие дополнительные приборы (39, 40), использующие геокоординаты.
19. Устройство по п.17, отличающееся тем, что оконечное устройство (36) имеет приемную часть (42), удостоверяющую выдачу пакета (1').
Это изобретение имеет недостатки, сложные математические и графические вычисления для программного обеспеченья, требующие временя и затрат энергоресурсов, работать изобретение может только с пакетами, нужна бумага и нанесение штрих-кодов, автоматизация только на определённом участке, без ручного труда полный цикл обработки груза от производителя до конечного покупателя невозможен.
Известно изобретение автоматического складирования и сортировки, работающее на складах Окадо в Великобритании, это единственный известный склад, где сортировка проходит без ручного труда, но в остальных операциях участвует ручной труд. Все имеющиеся технологии, на определённых этапах переработки грузов, задействуют ручной труд людей для приёма и передачи груза, для сортировки, например, продукция для автоматизации складов компании Mecalux, главный офис в Испании.
Недостатками имеющихся технологий сортировки грузов являются использование ручного труда, это значит, что есть возможность ошибки в сортировке груза, для приёма и передачи груза нужен экспедитор, для выгрузки и загрузки груза нужны рабочие, для формирования заказа и занесения данных о нём в базу, нужен продавец, нет возможности сортировать все разновидности грузов одним набором устройств.
Изобретение направлено на устранение этих недостатков, уменьшается время переработки грузов на всех участках, исключаются ошибки при сортировке груза, потеря груза, не нужен человеческий ресурс для ручного труда.
Техническое решение достигается посредством системы переработки грузов без ручного труда, содержащей стеллаж, однорядный или двухрядный для ящиков, кран-штабелёр, конвейер, стол-конвейер, транспортный путь, манипуляторы. Изобретение обеспечивает увеличение производительности труда при приёме и передаче груза, при выгрузке и загрузке, при составлении документации и занесения в базу данных, за счет ликвидации потерь от ручных манипуляций с грузами и документами. Не нужны поддоны, объединяющие коробки и прочие материалы для консолидации оптового груза, а также оборудование для этих операций. Это решение эффективнее всего использовать с малыми трубопроводными транспортными системами для перемещения грузов в ящиках, например, компаний Magway Limited, Великобритания, ведёт разработку с компанией ОКАДО, ссылка на сайт http://www.magway.com; JD. Com, Китай, сайт https://jdcorporateblog.com; CargoCap GmbH, Германия, сайт http://www.cargocap.de и т.д., патент RU №2755369, RU №2706615 автор Брюханов С.А.
1. Система переработки грузов без ручного труда, содержащая стеллаж однорядный или двухрядный, для ящиков, краны-штабелёры, конвейер, столы-конвейеры, транспортный путь, манипуляторы, отличается тем, что с одной стороны стеллажа установлены, транспортный путь для подачи подвижного состава, манипулятор для разгрузки из подвижного состава ящика с оптовым грузом на площадку кран-штабелера, кран-штабелёр для загрузки ящиков с оптовым грузом на стеллаж, с другой стороны стеллажа установлены кран-штабелёр для перемещения ящика на свою площадку, манипулятор для выгрузки штучного товара в ящик на столе-конвейере, столы-конвейеры для постановки под загрузку ящиков для штучных грузов, конвейер для транспортировки ящиков до столов-конвейеров и до места загрузки ящиков в подвижной состав, манипулятор в верху или внизу между столами-конвейерами, или на опорах над конвейером, для выгрузки из ящика, на площадке кран-штабелёра, штучного груза в ящик на столе-конвейере, манипулятор для загрузки ящиков в подвижной состав и постановки его на транспортный путь.
2. Система переработки грузов без ручного труда по п.1, отличается тем, что имеет следующую последовательность процесса сортировки оптового груза в штучный: транспортный путь доставляет подвижной состав с оптовым грузом до сектора разгрузки, где манипулятор выгружает ящик на кран-штабелёр и ставит подвижной состав обратно на транспортный путь, далее подвижной состав отправляется обратно к поставщику; кран-штабелёр ставит ящик в назначенное место на стеллаж; с дугой стороны стеллажа, в секторе распределения, кран-штабелёр перемещает ящик с оптовым грузом на свою площадку; с площадки этого кран-штабелёра манипулятор захватывает штучный груз и доставляет в ящик стоящий на столе-конвейере; на стол-конвейер ящик доставляет конвейер, а стол-конвейер, после загрузки, выталкивает ящик обратно на конвейер; заполняемый штучным товаром ящик следует до следующего стола-конвейера, чтобы загрузиться другим грузом, либо до сектора загрузки в подвижной состав, где манипулятор загружает ящик с грузом в ассортименте по штучно в подвижной состав и ставит его на транспортный путь.
3. Система переработки грузов без ручного труда по п.1, отличается тем, что имеет следующую последовательность подачи порожних ящиков на конвейер для загрузки грузов по штучно: подвижной состав с порожними ящиками доставляется транспортным путём до сектора разгрузки пустых ящиков, в начале конвейера, где манипулятор выгружает порожний ящик на конвейер, ставит подвижной состав обратно на транспортный путь и подвижной состав по транспортному пути, через манипулятор регулировки очереди, следует до сектора загрузки ящиков в подвижной состав, в это же время порожний ящик, следуя по конвейеру от стола-конвейера до другого стола-конвейера заполняется штучным грузом в ассортименте, когда ящик заполнится штучным грузом он переместится в сектор загрузки, где манипулятор загрузит ящик со штучным грузом в подвижной состав, из которого ящик выгрузился, и поставит подвижной состав на транспортный путь.
4. Система переработки грузов без ручного труда по п.1, отличается тем, что ящики содержат электронное устройство, которое в свою очередь содержит метку габаритов и положения ящика, пассивную или активную, электронный носитель обмена информацией, в свою очередь содержащий постоянный адрес депо, бортовой номер ящика, бортовые номера подвижных составов, в которые может грузиться ящик, а также содержащий электронный носитель для переменной информации в который вводится адрес доставки, вес груза, стоимость, данные о грузе и производителе, электронный чек, сертификат и прочая необходимая информация, что позволяет уменьшить количество приёмопередающих датчиков и опознавательных электронных устройств в технологии обработки грузов, не нужна бумага для нанесения кодов, бумажный чек, бумажный документооборот, уменьшается количество математических вычислений на компьютере управления во время опознания груза и ящика.
5. Система переработки грузов без ручного труда по п.1, отличается тем, что манипулятор соединён с захватом через весы, когда манипулятор поднимает груз из ящика, то компьютер управления складом-магазином получает данные о весе груза и вносит их в базу данных.
Сущность заявленного технического решения поясняется чертежами 1-16, где:
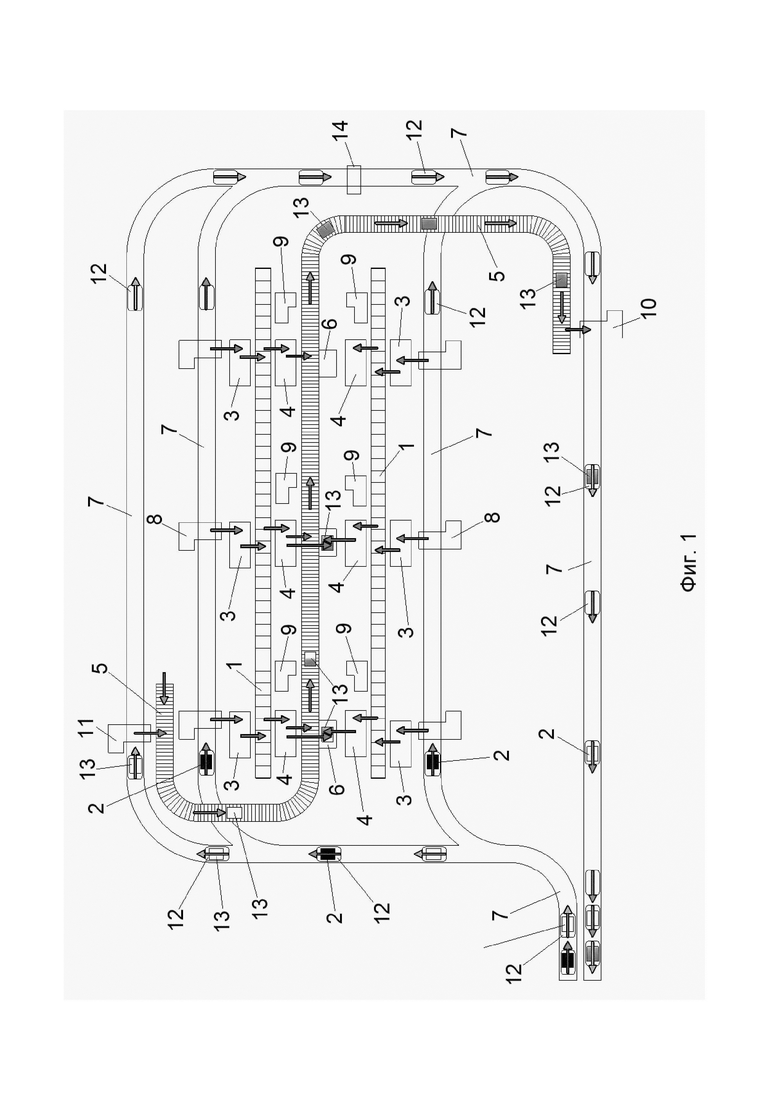
на фиг.1 представлена схема расположения устройств и перемещения грузов с однорядным стеллажом, стрелки с капсулами показывают направление движения подвижного состава, стрелки на конвейере показывают направление движения его транспортных узлов, стрелки на манипуляторе, кране-штабелере и стеллаже, показывают направление движения груза;
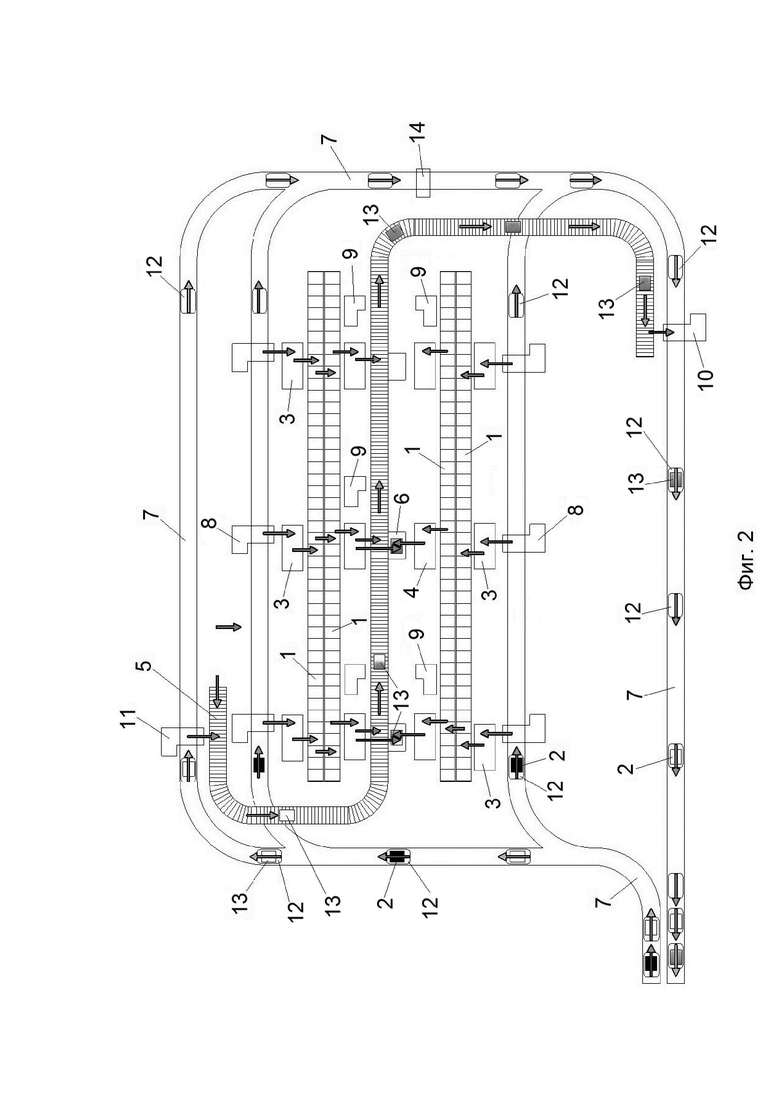
на фиг. 2 представлена схема расположения устройств и перемещения грузов с двухрядным стеллажом, стрелки с капсулами показывают направление движения подвижного состава, стрелки на конвейере направление движения его транспортных узлов, стрелки на манипуляторе, кране-штабелере и стеллаже, показывают направление движения груза;
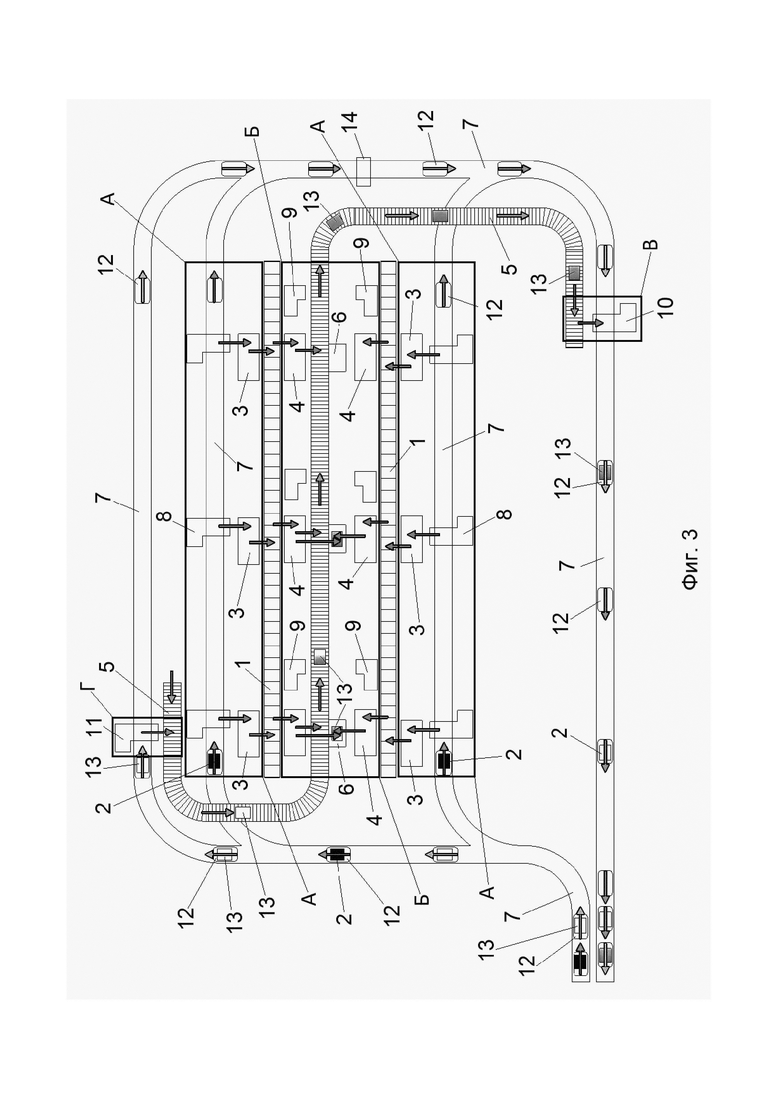
на фиг. 3 представлена схема расположения устройств и перемещения грузов, разделённая на секторы;
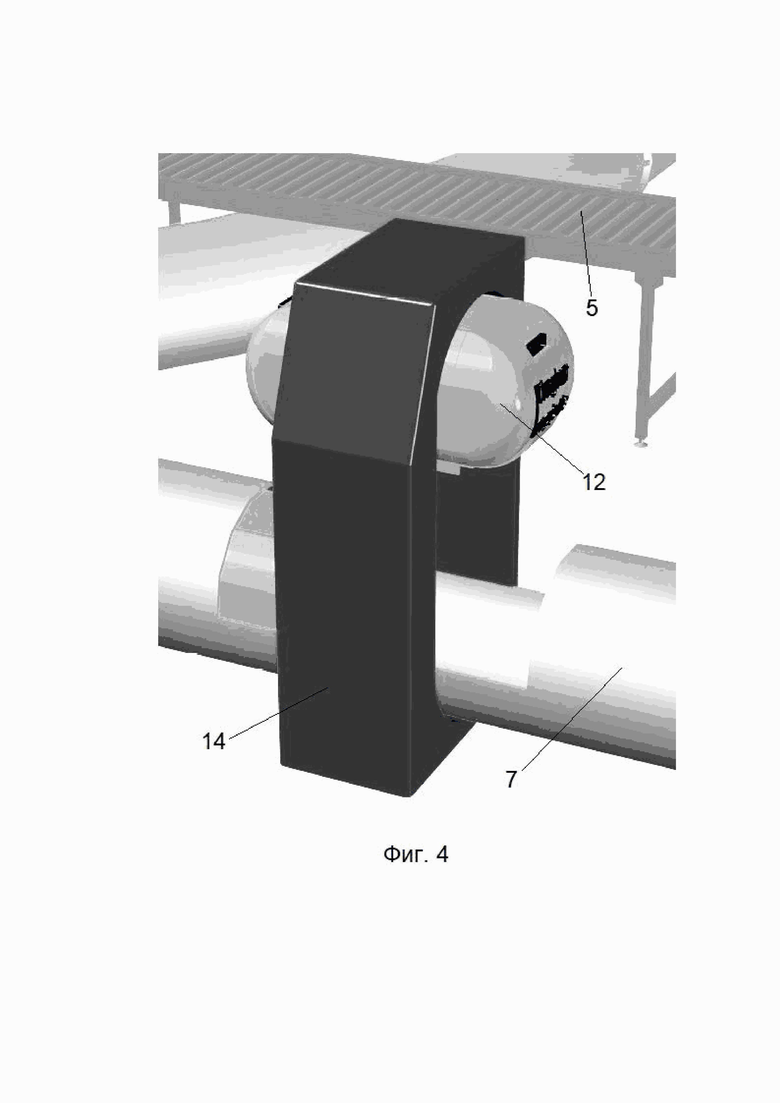
на фиг. 4 изображён манипулятор-подъёмник для регулировки очереди загрузки подвижного состава;
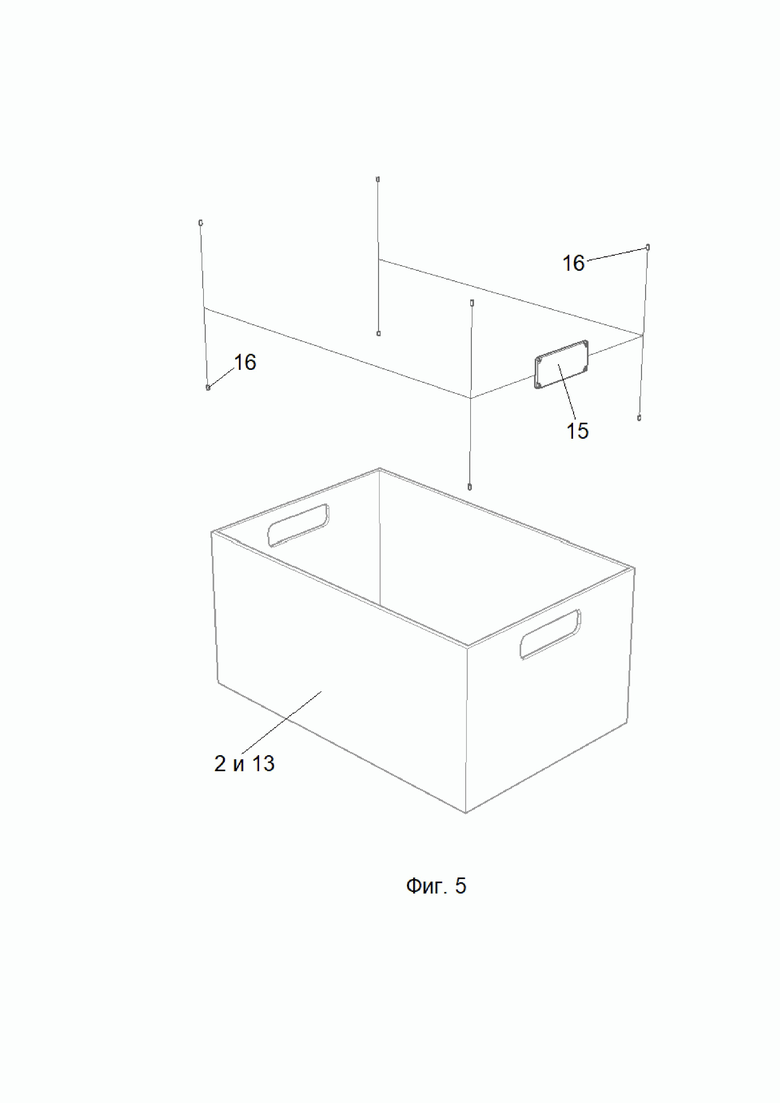
на фиг. 5 показан ящик и электронное устройство с датчиками габаритов, смонтированное в его стенках;
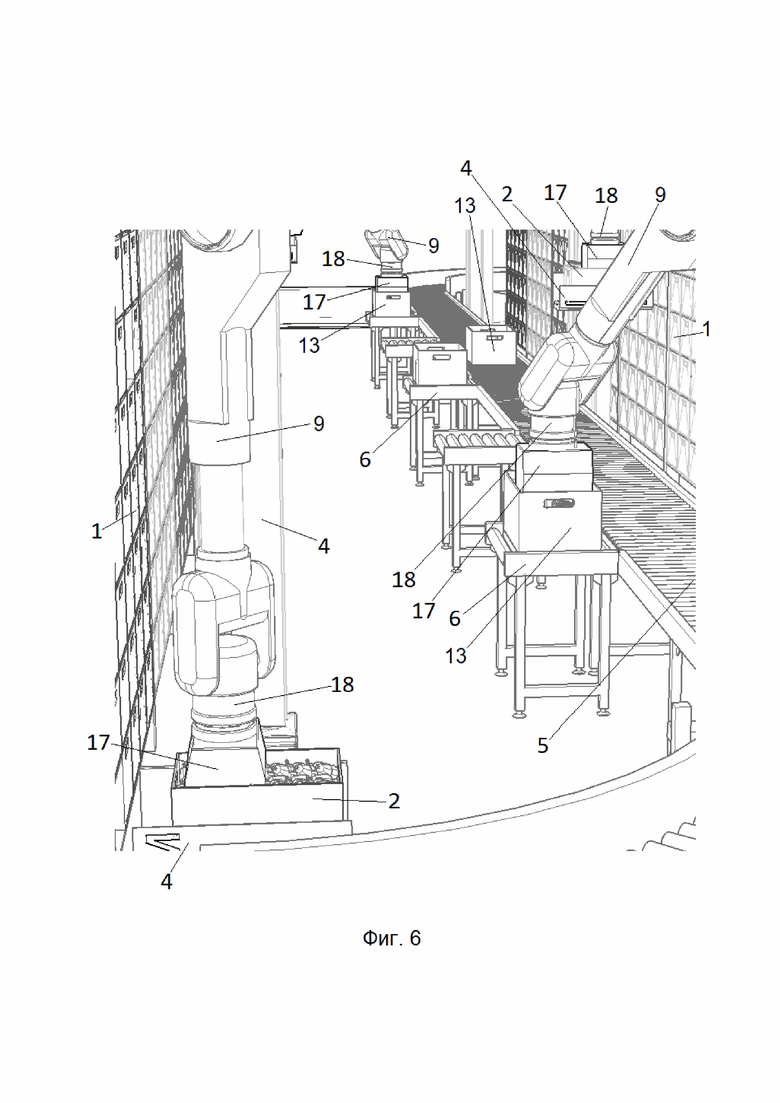
на фиг. 6 изображен в изометрии сектор, где происходит формирование штучного груза в ассортименте из оптового груза;
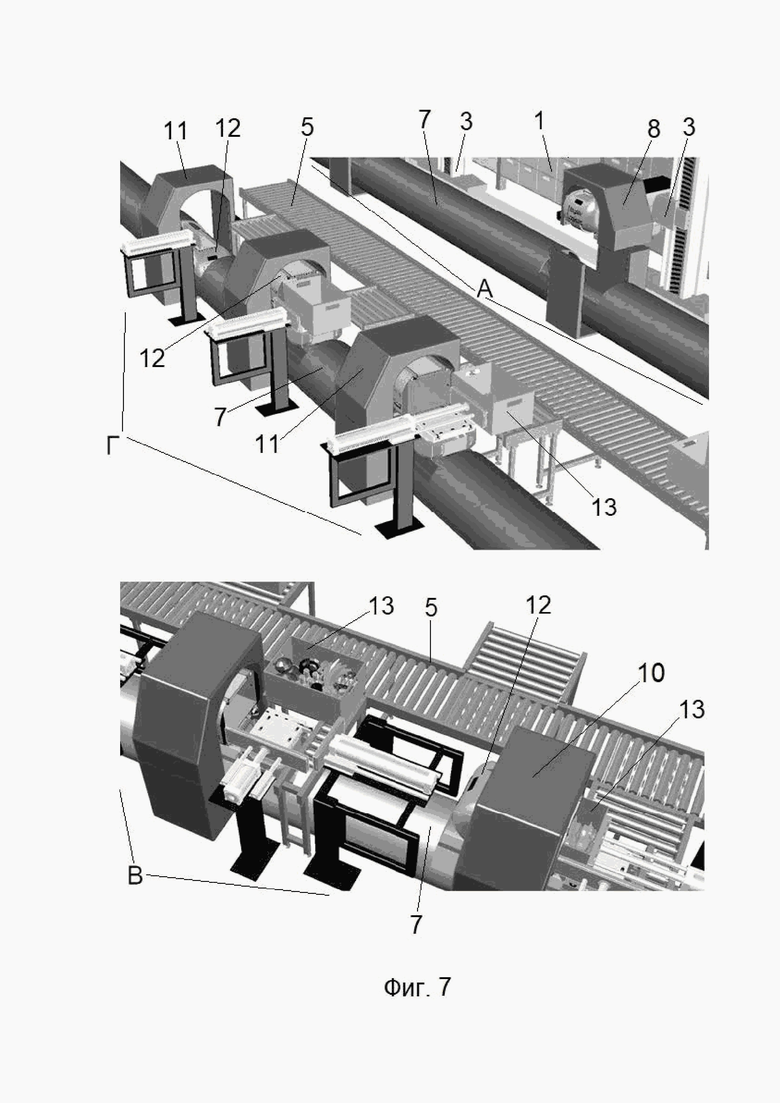
на фиг. 7 представлен сектор выгрузки пустых ящиков на конвейер, сектор загрузки ящиков с оптовым грузом, сектор загрузки ящиков в подвижной состав;
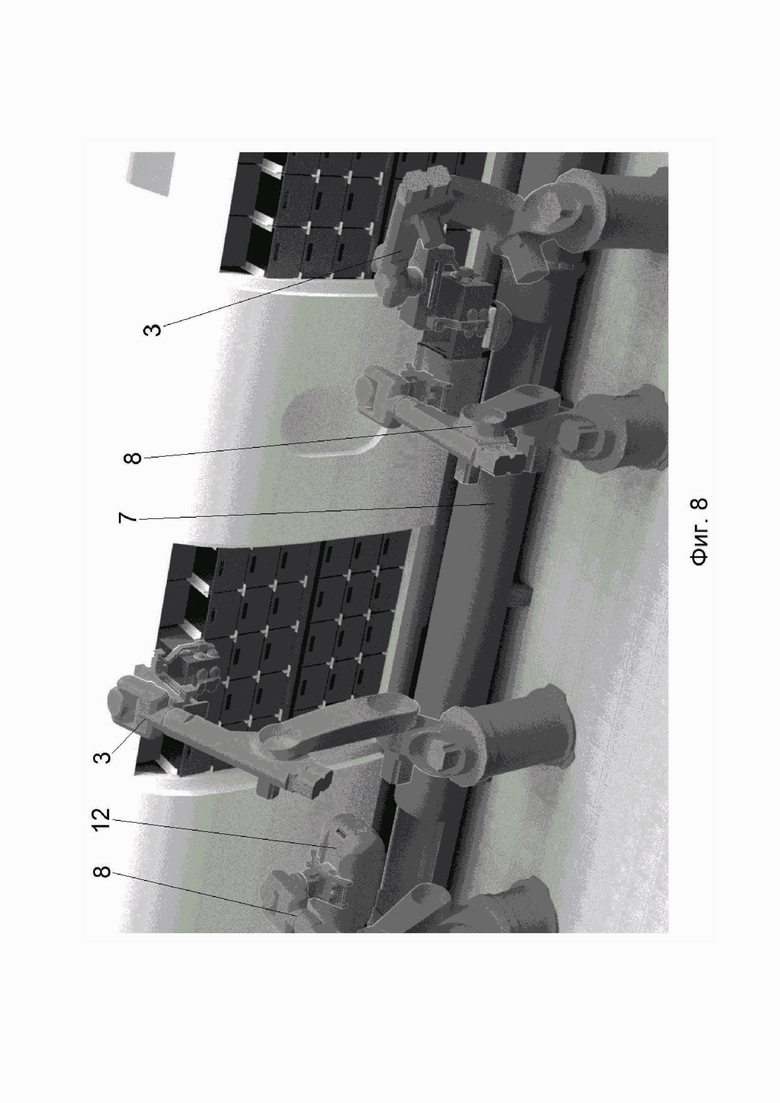
на фиг. 8 представлен вариант манипулятора, которым можно заменить кран-штабелёр и одноосевой манипулятор, на примере загрузки ящиков в вагон поезда;
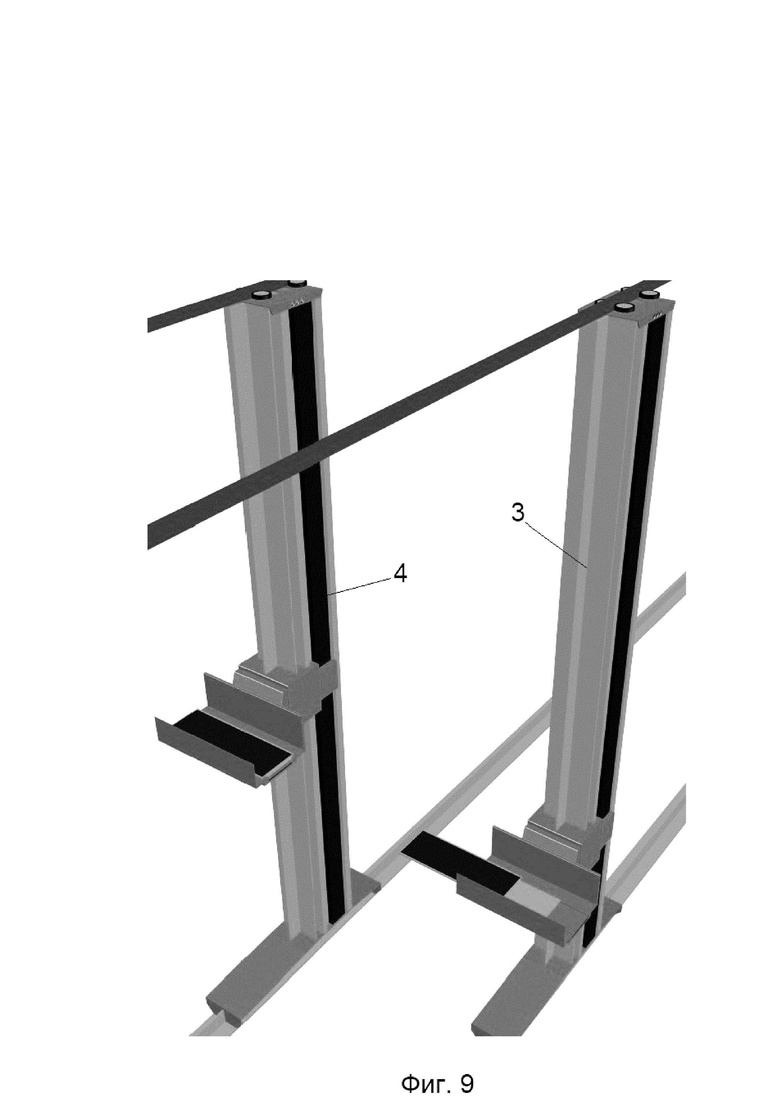
на фиг. 9 изображены краны-штабелёры в изометрии, слева кран-штабелёр с механизмом передвижения ящика в центре, справа кран-штабелёр с механизмом передвижения ящика, выдвинутым в левую сторону;
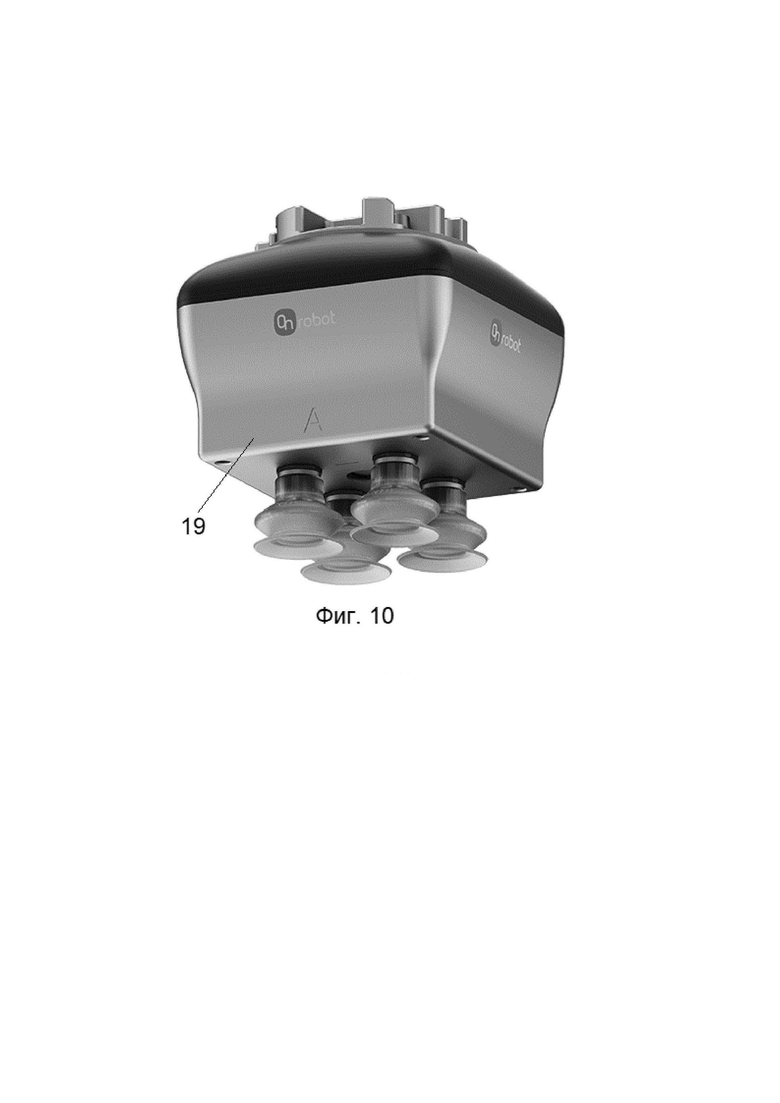
на фиг. 10 показан вакуумный захват для манипулятора;
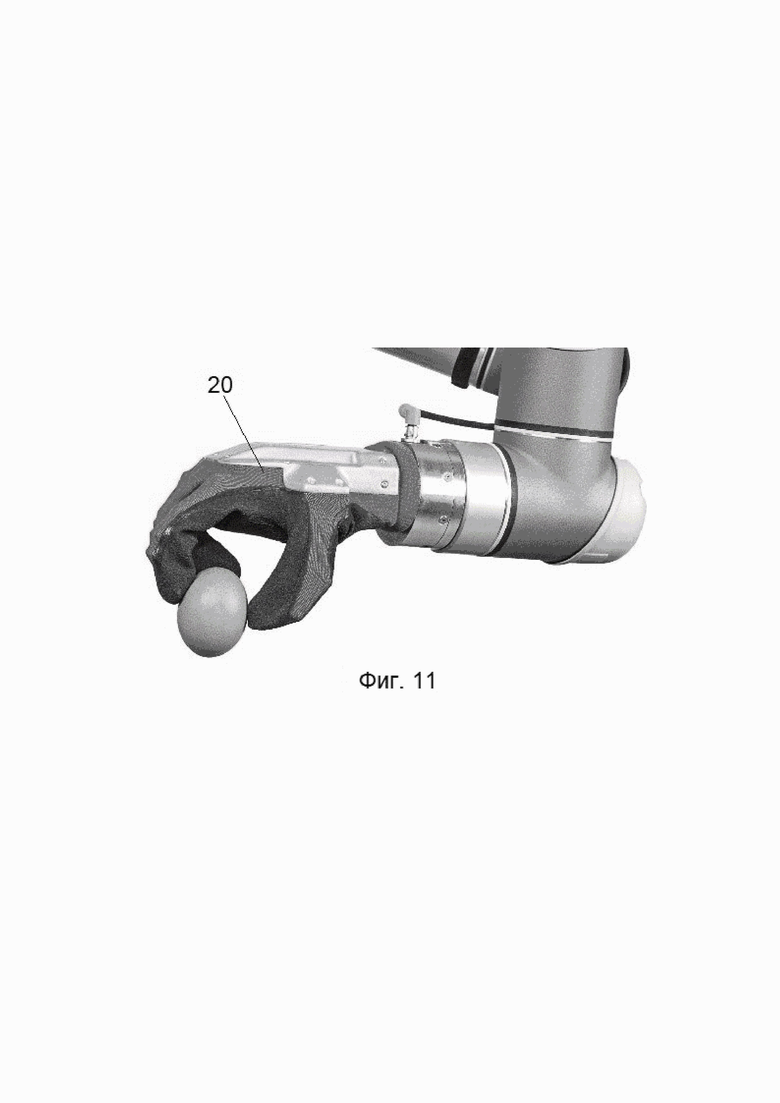
на фиг. 11 показан механический антропоморфный захват для манипулятора;
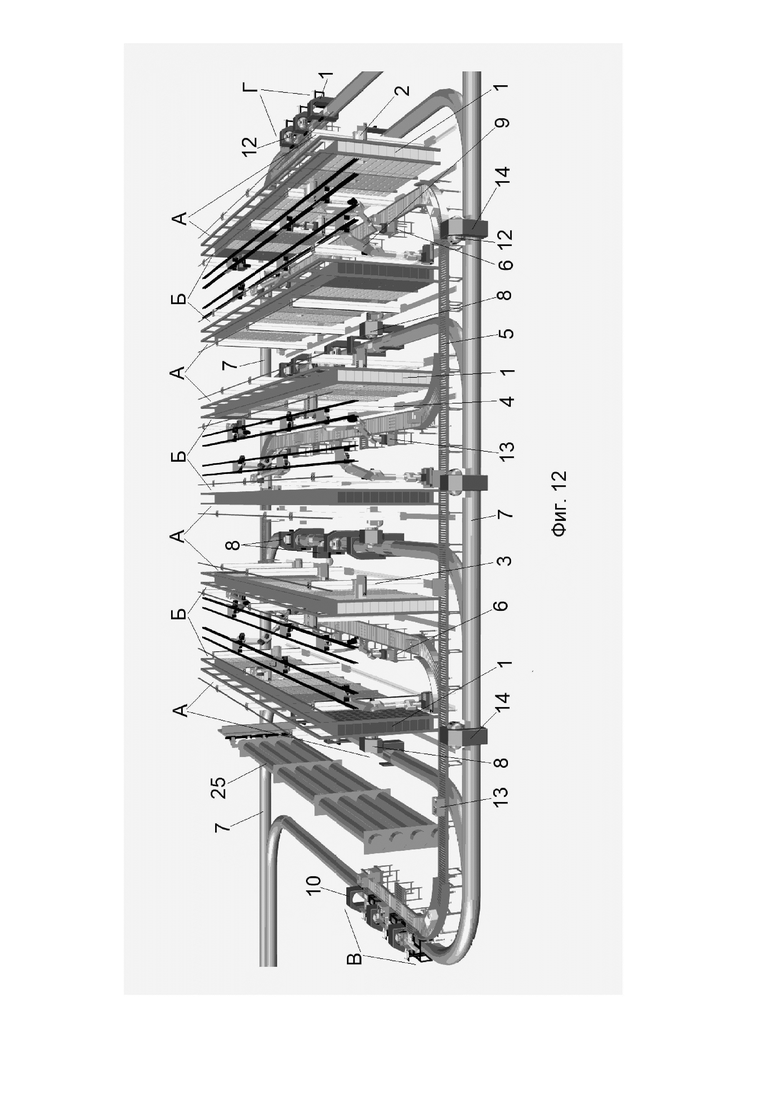
на фиг. 12 изображён автоматизированный склад-магазин, вид справа, на 3500 наименований товаров народного потребления;
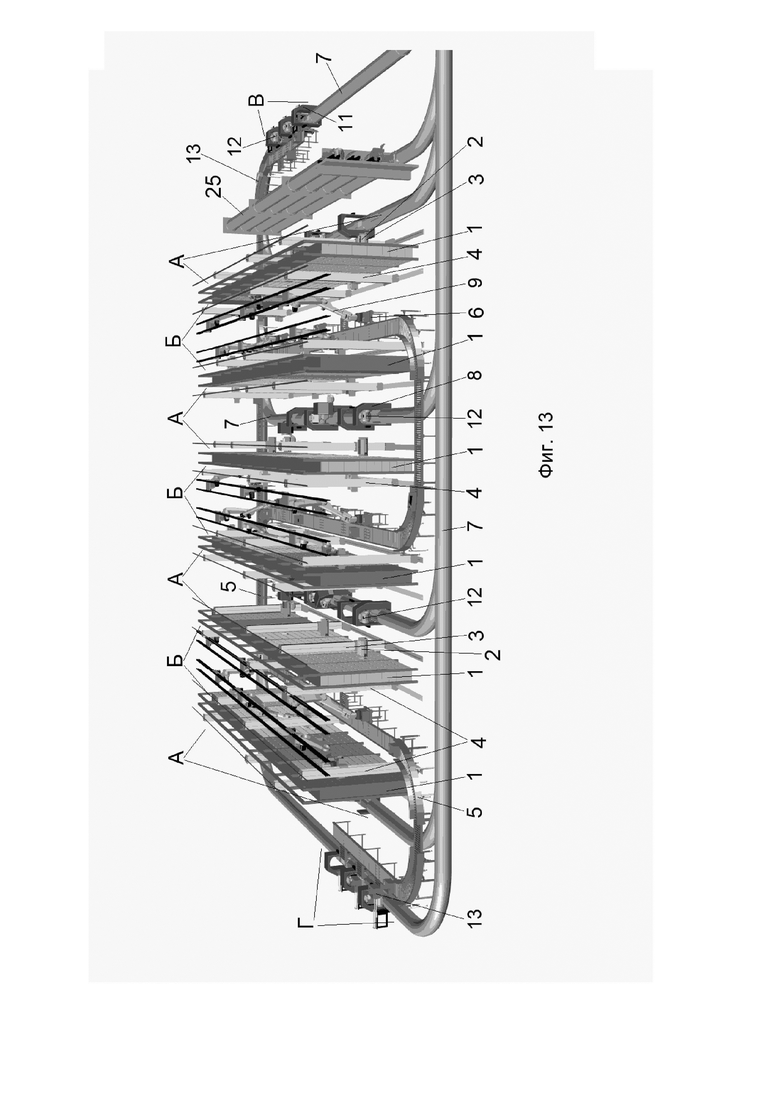
на фиг. 13 изображён автоматизированный склад-магазин, вид слева, на 3500 наименований товаров народного потребления;
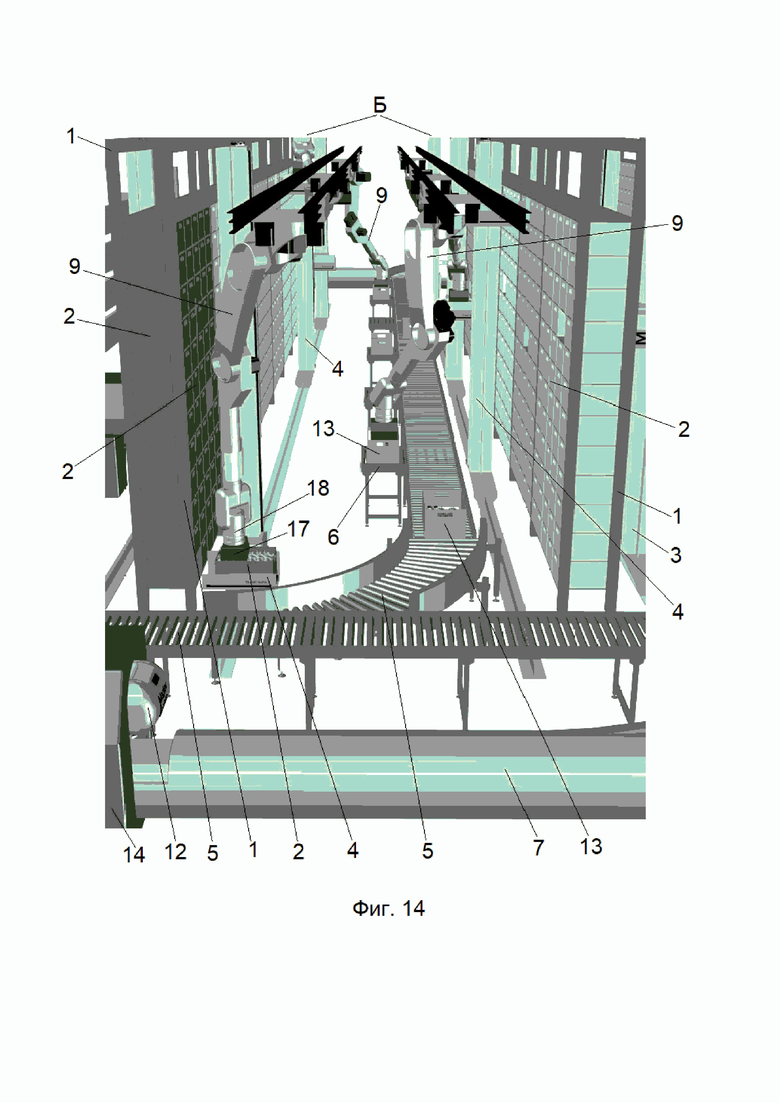
на фиг. 14 показан сектор со стеллажами, где из оптового груза формируется штучный ассортимент в одном ящике.
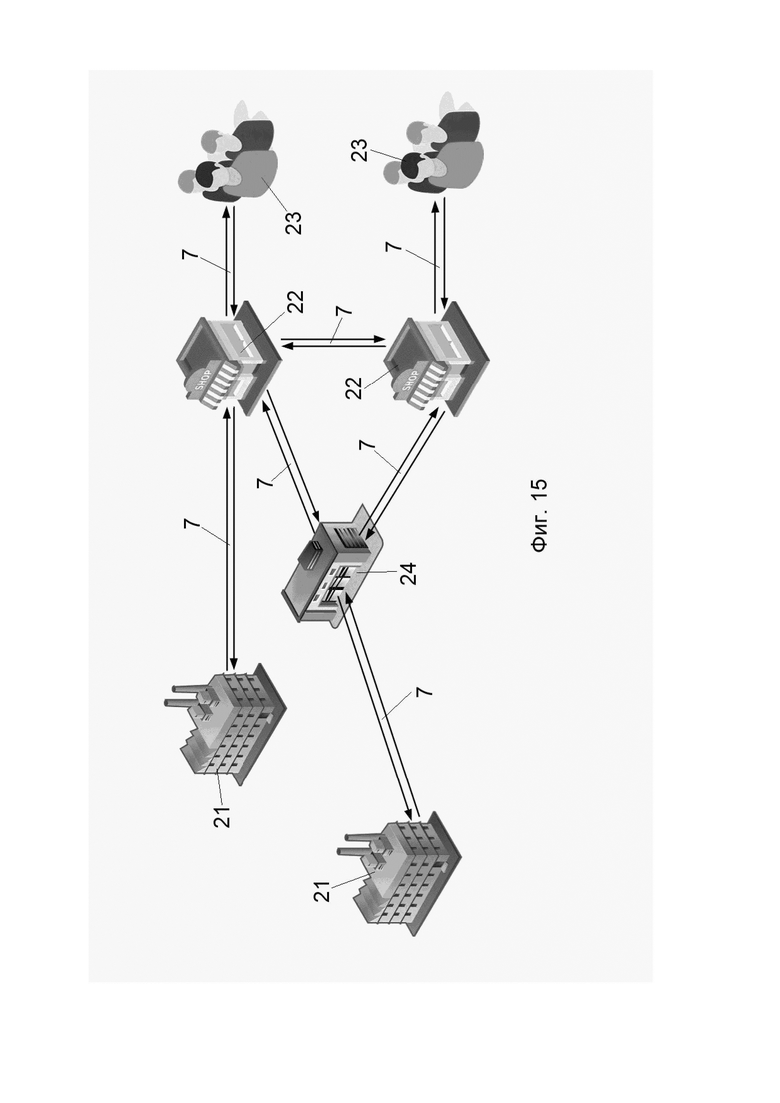
на фиг. 15 представлена схема перемещения грузов и места их обработки;
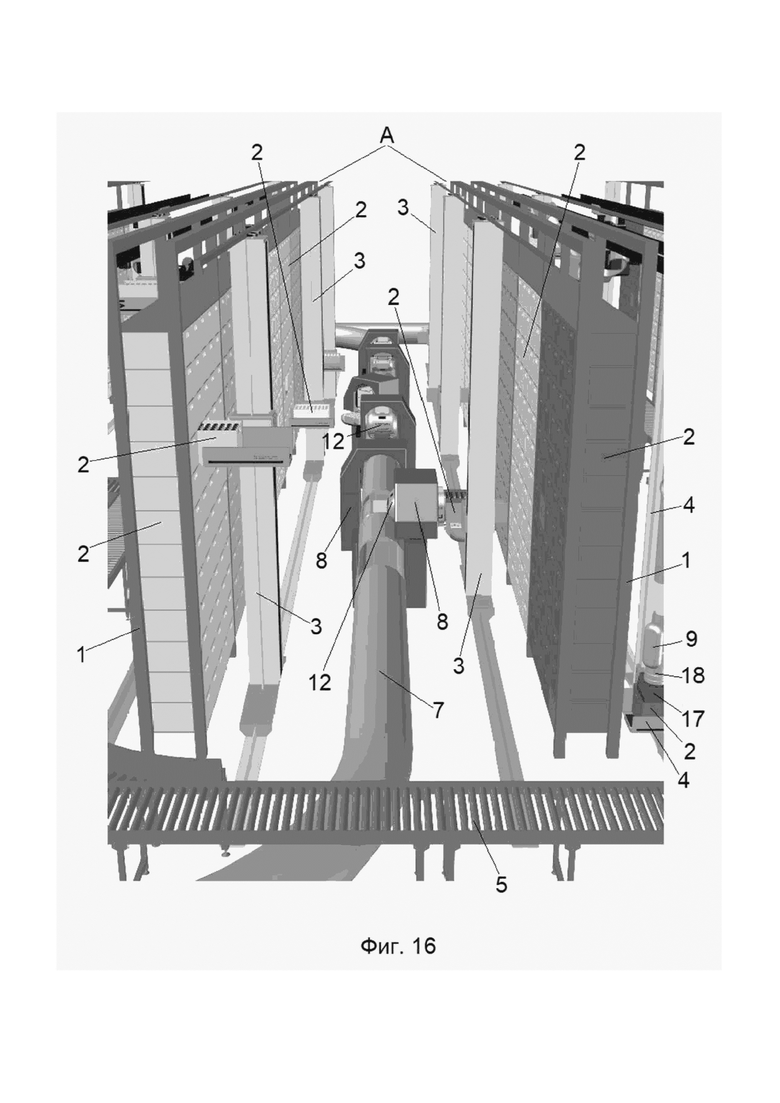
на фиг. 16 показан сектор выгрузки ящиков с оптовым грузом на стеллажи;
Техническое решение достигается посредством системы переработки грузов без ручного труда, содержащий стеллаж 1, однорядный или двухрядный для ящиков 2, кран-штабелёр 3 и 4, конвейер 5, стол-конвейер 6, транспортный путь 7, манипуляторы 8, 9, 10 и 11. Изобретение обеспечивает увеличение производительности труда при приёме и передаче груза, при выгрузке и загрузке, при составлении документации и занесения в базу данных, за счет ликвидации потерь от ручных манипуляций с грузами и документами. Не нужны поддоны, объединяющие коробки и прочие материалы для консолидации оптового груза, а также оборудование для этих операций. Это решение эффективнее всего использовать с малыми трубопроводными транспортными системами для перемещения грузов в ящиках, например, компаний Magway Limited, Великобритания, ведёт разработку с компанией ОКАДО, ссылка на сайт http://www.magway.com; JD. Com, Китай, сайт https://jdcorporateblog.com; CargoCap GmbH, Германия, сайт http://www.cargocap.de и т.д., патент RU №2755369, RU №2706615 автор Брюханов С.А.
1. Система переработки грузов без ручного труда, содержащая стеллаж 1 (фиг.1), однорядный или двухрядный (фиг. 2), для ящиков 2 (фиг. 1 и фиг. 2), краны-штабелёры 3 и 4, конвейер 5, столы-конвейеры 6, транспортный путь 7, манипуляторы 8, 9, 10, 11 отличается тем, что с одной стороны стеллажа 1 установлены, транспортный путь 7 для подачи подвижного состава 12, манипулятор 8 для разгрузки из подвижного состава 12 ящика 2 с оптовым грузом на площадку кран-штабелера 3, кран-штабелёр 3 для загрузки ящиков 2 с оптовым грузом на стеллаж 1, с другой стороны стеллажа 1 установлены кран-штабелёр 4 для перемещения ящика 2 на свою площадку, манипулятор 9 для выгрузки штучного товара в ящик 13 на столе-конвейере 6, столы-конвейеры 6 для постановки под загрузку ящиков 13 для штучных грузов, конвейер 5 для транспортировки ящиков 13 до столов-конвейеров 6 и до места загрузки ящиков 2 и 13 в подвижной состав 12, манипулятор 9 в верху или внизу между столами-конвейерами 6, или на опорах над конвейером 5, для выгрузки из ящика 2, на площадке кран-штабелёра 4, штучного груза в ящик 13 на столе-конвейере 6, манипулятор 10 для загрузки ящиков 2 и 10 в подвижной состав 12 и постановки его на транспортный путь 7.
2. Система переработки грузов без ручного труда по п.1, отличается тем, что имеет следующую последовательность процесса сортировки оптового груза в штучный: транспортный путь 7 (фиг. 3) доставляет подвижной состав 12 с оптовым грузом до сектора А разгрузки, где манипулятор 8 выгружает ящик 2 на кран-штабелёр 3 и ставит подвижной состав 12 обратно на транспортный путь 7, далее подвижной состав 12 отправляется обратно к поставщику; кран-штабелёр 3 ставит ящик 2 в назначенное место на стеллаж 1; с дугой стороны стеллажа 1, в секторе Б сортировки, кран-штабелёр 4 перемещает ящик 2 с оптовым грузом на свою площадку; с площадки этого кран-штабелёра 4 манипулятор 9 захватывает штучный груз и доставляет в ящик 13 стоящий на столе-конвейере 6; на стол-конвейер 6 ящик 13 доставляет конвейер 5, а стол-конвейер 6, после загрузки, выталкивает ящик 13 обратно на конвейер 5; заполняемый штучным товаром ящик 13 следует до следующего стола-конвейера 6, чтобы загрузиться другим грузом, либо до сектора В загрузки в подвижной состав 12, где манипулятор 10 загружает ящик 13 с грузом в ассортименте по штучно в подвижной состав 12 и ставит его на транспортный путь 7.
3. Система переработки грузов без ручного труда по п.1, отличается тем, что имеет следующую последовательность подачи порожних ящиков 13 (фиг. 3) на конвейер 5 для загрузки грузов по штучно: подвижной состав 12 с порожними ящиками 13 доставляется транспортным путём 7 до сектора Г разгрузки пустых ящиков 13, в начале конвейера 5, где манипулятор 11 выгружает порожний ящик 13 на конвейер 5, ставит подвижной состав 12 обратно на транспортный путь 7 и подвижной состав 12 по транспортному пути 7, через манипулятор 14 (фиг. 1 и фиг. 4) регулировки очереди, следует до сектора В загрузки ящиков 13 (фиг. 3) в подвижной состав 12, в это же время порожний ящик 13, следуя по конвейеру 5 от стола-конвейера 6 до другого стола-конвейера 6 заполняется штучным грузом в ассортименте, когда ящик 13 заполнится штучным грузом он переместится в сектор В, где манипулятор 10 загрузит ящик 13 со штучным грузом в подвижной состав 12, из которого ящик 13 выгрузился, и поставит подвижной состав 12 на транспортный путь 7.
4. Система переработки грузов без ручного труда по п.1, отличается тем, что ящик 2 и 13 (фиг.5) содержат электронное устройство 15, которое в свою очередь содержит метку 16 габаритов и положения ящика, пассивную или активную, электронный носитель обмена информацией, в свою очередь содержащий постоянный адрес депо, бортовой номер ящика, бортовые номера подвижных составов 12 (фиг. 1 и фиг. 4), в которые может грузиться ящик 2 и 13, а также содержащий электронный носитель для переменной информации в который вводится адрес доставки, вес груза, стоимость, данные о грузе и производителе, электронный чек, сертификат и прочая необходимая информация, что позволяет уменьшить количество приёмопередающих датчиков и опознавательных электронных устройств в технологии обработки грузов, не нужна бумага для нанесения кодов, бумажный чек, бумажный документооборот, уменьшается количество математических вычислений на компьютере управления во время опознания груза и ящика.
5. Система переработки грузов без ручного труда по п.1, отличается тем, что манипулятор 9 (фиг. 6) соединён с захватом 17 через весы 18, когда манипулятор 9 поднимает груз из ящика 2, то компьютер управления складом-магазином получает данные о весе груза и вносит их в базу данных.
Система переработки грузов без ручного труда может осуществляться различными конструкциями манипуляторов, определяющим является место расположения по отношению к стеллажу 1 (фиг.1 и фиг. 2) и последовательность перемещения груза. Например, в секторах А, В и Г (фиг. 3 и фиг. 7) можно использовать одноосевые манипуляторы как 8, 10, 11 (фиг. 7), так и манипуляторы с несколькими осями. Рассмотрим на примере загрузки вагонов, шестиосевой манипулятор 8 (фиг. 8) заменяет одноосевой манипулятор 8 (фиг. 7), а шестиосевой манипулятор 3 (фиг. 8) заменяет кран-штабелёр 3 (фиг. 7 и фиг. 9).
Захватные устройства 17 (фиг. 6) (далее захват) для манипуляторов очень разнообразны, наибольшее применение получили механические, вакуумные, магнитные, но есть ещё адгезивные и универсальные. Для способа и устройства переработки грузов без ручного труда лучшее решение, на сегодняшний день, использовать вакуумные захваты 19 (фиг. 10) и механические антропоморфные захваты 20 (фиг. 11). Сейчас уже нет такого продукта, который не могут захватить захватные устройства 17 (фиг. 6). Захват 17 может захватить одну вещь или несколько сразу, может быть револьверным или с заменой на другой автоматически. Захваты 17 для разных товаров могут быть разной конструкции или универсальными. Например, отделы фруктов и овощей находятся в одном месте на стеллаже 1 и подразделяются на отделы также как товары в магазине. Т.е. каждый отдел имеет свой манипулятор 9 с соответствующим захватом 17, например, в зависимости от того, во что упакованы фрукты и овощи в целлофан, в бумажный пакет, в сетку, в тканевой мешок или без упаковки. С целлофановой, бумажной, пластиковой, картонной упаковкой и без упаковки справиться вакуумный захват 19 (фиг. 10), с сеткой и тканью механический захват 20 (фиг. 11).
Трубопроводный транспортный путь 7 (фиг. 7, фиг. 12 и фиг. 13) и подвижной состав 12 изображены магнитолевитационными, но можно использовать транспортный путь 7 для колёсного подвижного состава, а также в виде конвейера или транспортного робота-шаттла – платформа с подъёмным механизмом, подъезжает под стеллаж или поддон, немного поднимает его и перемещает в другое место. Их два типа, с перемещением по ровной поверхности или по рельсам. Существуют разные конструкции подвижных составов, с открытием люка впереди/сзади, вверху, справа/слева или внизу.
Стол-конвейер 6 (фиг. 6 и фиг. 14) можно использовать роликовый, ленточный и магнитолевитационный.
Манипулятор 14 (фиг. 4 и фиг. 12) для регулировки очереди движения подвижного состава 12, он поднимает его для пропуска позади едущего подвижного состава 12, для этого можно использовать любое подъёмное устройство с захватом.
Работает система переработки грузов без ручного труда (далее склад-магазин) следующим образом. Например, транспортный путь 7 (фиг. 15) построен от производителя 21 груза до склада-магазина 22, от склада-магазина 22 до конечного покупателя 23, т.е. до жилых домов. Если расстояние от производителя 21 до склада-магазина 22 больше, например, 250 км, то в цепочку поставок грузов между производителем 21 и складом-магазином 22 включается распределительный центр-склад 24. Производителю 21 нужно только загрузить груз в ящики 2 (фиг. 5), не нужны консолидирующие (объединяющие) коробки, например, для напитков в бутылках, целлофановые ленты, а также оборудование для консолидации груза. Груз от производителя 21 (фиг. 15) поступает в склад-магазин 22 в подвижном составе 12 (фиг. 1 и фиг. 16). В складе-магазине 22 (фиг. 15) груз в ящиках 2 (фиг. 16) расставляется по стеллажам 1, каждое место на стеллаже 1 имеет точный адрес. Стеллажи 1 заполняются по видам товаров и по разнице в весе, товары большего веса располагаются в начале конвейера 5. Это для того, чтобы грузы разных весов и прочности раскладывались в ящике 13 не повреждая друг друга. Так раскладывает товар в магазине человек, когда собирает его в корзину.
Ящик 2 (фиг. 1 и фиг. 16) взвешивается в подвижном составе 12 у производителя 21 (фиг. 15), сверяя вес и прочие характеристики с данными электронной документации. Затем перемещается в склад-магазин 22 (фиг. 15), когда кран-штабелёр 3 (фиг. 1 и фиг. 16) ставит ящик 2 на полку стеллажа 1, это и есть момент передачи груза от производителя 21 (фиг. 15) складу-магазину 22. Данные на груз от производителя 21 считываются сканером с электронного устройства 15 (фиг. 5) ящика 2 на площадке кран-штабелёра 3 (фиг. 1 и фиг. 16), эти данные вносятся в базу компьютера склада-магазина 22 (фиг. 15). Данными является общий вес, характеристики груза, место происхождения, сертификат, стоимость и прочее. Далее ящик 2 (фиг. 12, фиг. 13, фиг. 14) с оптовым грузом на стеллаже 1 кран-штабелёр 4 выдвинет на свою площадку, а манипулятор 9 выгрузит груз в ящик 13 для штучных грузов, который перемещает конвейер 5, до столов-конвейеров 6, эта операция производится необходимое количество раз, без превышения объема ящика 13.
Порожние ящики 13 (фиг. 3, фиг. 7, фиг. 12 и фиг. 13) доставляются в сектор Г подвижным составом 12 и выгружаются манипулятором 11 на конвейер 5. Заполненный ящик 13 (фиг. 3, фиг. 7, фиг. 12 и фиг. 13) конвейер 5 доставляет в сектор В, где передающее устройство внесёт данные о товаре, данные по чеку, адрес доставки с компьютера склада-магазина 22 (фиг. 15) в электронное устройство 15 (фиг. 5) манипулятор 10 (фиг. 7) загрузит ящик 13 в подвижной состав 12, поставит его на транспортный путь 7 и подвижной состав 12 уедет до адреса доставки, т.е. до конечного покупателя 23 (фиг. 15). Подвижной состав 12 (фиг. 1 и фиг. 7), доставив груз до конечного покупателя 23 (фиг. 15), где ящик 13 разгрузят, и подвижной состав 12 доставит его обратно в склад-магазин 22 (фиг. 15), чтобы загрузиться и повторить операцию с другим адресом доставки или припарковаться в депо 25 (фиг. 12 и фиг. 13). В ночное время подвижной состав 12 паркуется в депо 25 склада-магазина 22 (фиг. 15).
Самый ответственный участок, это формирование штучного заказа, когда манипулятор 12 (фиг. 6 и фиг. 14) захватывает груз из ящика 2 и грузит его в ящик 13. Для этого техническому зрению не нужно опознать груз по нарисованному коду, знаку, геометрии и цвету, этот процесс занимает много времени и на это нужна электроэнергия. Когда манипулятор 9 перемещает захват 17 к ящику 2 на площадке крана-штабелёра 4, то вместе с командой перемещения в нужную точку, присутствует информация о грузе. Манипулятору 9 остаётся только не выпасть за геометрию ящика 2 и упаковки или груза без упаковки. Техническое зрение выполнит всего две операции, совместит границы ящика и груза, вида сверху, для попадания захвата манипулятора 9 в центр упаковки или груза. Команда на перемещение манипуляторов 8, 9, 10 и 11 (фиг. 1 и фиг. 12), кранов-штабелёров 3 и 4, всегда связана с информацией о грузе через электронную метку 15 (фиг. 5) устроенной в стенке ящика 2 и 13. На этом же участке происходит взвешивание груза по штучно, захват 17 (фиг. 6 и фиг. 14) манипулятора 9 соединён с манипулятором 9 через весы 18. Это даёт возможность контролировать убывание груза в ящике 2, например, когда груз заканчивается и его остаётся на 20 минут отгрузки, то производителю 21 (фиг. 15) или в распределительный центр-склад 24 поступает сигнал о том, что нужно отправить конкретный груз по такому-то адресу. Адресом является место на стеллаже 1 (фиг. 1 и фиг. 16). Производитель 21 (фиг. 15) или распределительный центр-склад 24 отправляет груз в ящике 2 (фиг. 1, фиг. 5 и фиг. 16), он прибывает на стеллаж 1 (фиг. 1 и фиг. 16). Это происходит в то время, когда манипулятор 9 забирает порожний ящик 2 с площадки кран-штабелёра 4, и ставит его на конвейер 5, который доставляет порожний ящик 2 до манипулятора 10 (фиг. 3, фиг. 7, фиг. 12 и фиг. 13) в сектор В. Манипулятор 10 загружает ящик 2 в подвижной состав 12, и он отравляется по транспортному пути 7 к производителю 21 (фиг. 15) или в распределительный центр-склад 24 для очередной загрузки и доставки.
Также порожний ящик 2 (фиг. 1) может вернуться с полки стеллажа 1 через кран-штабелёр 3, и манипулятор 8 погрузит его в подвижной состав 12, т.е. в обратном порядке. Если стеллаж 1 (фиг. 2) двойной, то эта опция будет отсутствовать. Когда закончится товар в ящике 2 (фиг. 15), его заберёт манипулятор 9 (фиг. 1 и фиг. 14) через кран-штабелёр 4, а кран-штабелёр 3 протолкнёт ящик 2 с оптовым товаром на место порожнего. Эту опцию можно реализовать на однорядном стеллаже 1, располагая по два ящика с одним товаром на одном стеллаже 1.
Манипуляторы 9 (фиг. 14), распределяя штучный груз по ящикам 13 формируют цифровые кассовые и товарные чеки на каждый груз, эти данные заносятся в базу данных компьютера склада-магазина 22 (фиг. 15) и в электронное устройство 15 (фиг. 5) ящика 13, когда сбор грузов в ящик 13 закончен, то чеки объединяются в один. Конечный покупатель 23 (фиг. 12) считает с него данные о грузе смартфоном на небольшом расстоянии.
Вместе с командой на загрузку из базы данных компьютера склада-магазина поступит информация в электронное устройство 15 (фиг. 5) ящика 13 в виде адреса доставки. Когда подвижной состав 12 (фиг. 7) в секторе В будет загружен ящиком 13, то бортовой компьютер подвижного состава 12 со сканирует адрес доставки с электронного устройства 15 (фиг. 5) ящика 13 и будет следовать по заданному маршруту.
Электронные носители информации работают годами без подзарядки, показали свою надёжность во многих отраслях, в том числе и в космосе. У электронного носителя 15 (фиг. 5) есть возможность заряжаться от электропитания подвижного состава 12 (фиг. 16) на ходу или на парковке 25 (фиг. 12 и фиг. 13), поэтому он будет надёжным и долговечным. Ящик 2 и 13 (фиг. 5) с электронным носителем 15 будет «виден» всем манипуляторам, конвейеру 5 (фиг.14), столу-конвейеру 6, подвижному составу 12, посредством считывающих датчиков, поток ящиков 2 и 13 просто вывести на компьютер управления, легко собирать данные автоматическом режиме без участия человека. Матрица логистики вносится в компьютерную программу одни раз, далее запрос на поступление товаров формируется автоматически. Посредством сбора информации о товаре и его скорости продажи с полки стеллажа 1 формируются запросы на оптовый товар. Товар, который не продаётся в одном складе-магазине 22 (фиг. 15), может автоматически отправиться в другой склад-магазин 22, где на него есть спрос, или отправиться обратно к производителю 21.
Промежуточный распределительный центр-склад 24 устроен по аналогу склада-магазина 22. Может формировать в мелкий опт в ящики и также как склад-магазин 22 сортировать товар по штучно для обслуживания прилегающих жилых районов.
Изобретение обеспечивает увеличение производительности в расформировании оптового груза в штучный ассортимент, за счет ликвидации потерь от ручных манипуляций грузов. Уменьшает ошибки во время сортировки, исключает из оборота товаров народного потребления объединяющие мелкий опт коробки, бумагу для нанесения кодов, полиэтиленовые пакеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Трубопроводная магнитолевитационная грузовая транспортная система | 2021 |
|
RU2755369C1 |
| ПОЧТОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НА МАГНИТНОМ ПОДВЕСЕ, УСТРОЙСТВО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ, УСТРОЙСТВО ЕЁ ПУНКТА ПОГРУЗКИ И РАЗГРУЗКИ, УСТРОЙСТВО ВЕРТИКАЛЬНОГО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ | 2018 |
|
RU2706615C2 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Автоматизированный магазин и способ его функционирования | 2020 |
|
RU2747128C1 |
| Устройство для разгрузки и загрузки стеллажей склада штучными грузами | 1974 |
|
SU547378A1 |
| Склад для хранения штучных грузов | 1976 |
|
SU734088A1 |
| Устройство для разгрузки и загрузки стеллажей штучными грузами | 1974 |
|
SU547377A1 |
| Устройство для загрузки контейнеров предметами | 1980 |
|
SU889537A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ И ПЕРЕМЕЩЕНИЯ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 1993 |
|
RU2077466C1 |
Использование: Изобретение относится к системам автоматического складирования, приёма и передачи, сортировки оптовых грузов с последующей комплектацией их в одной таре поштучно с дальнейшей отправкой груза по адресу доставки. Существо: Техническое решение достигается посредством изобретения система переработки грузов без ручного труда, где с одной стороны стеллажа установлены транспортный путь для подачи подвижного состава, манипулятор для разгрузки из подвижного состава ящика с оптовым грузом на площадку крана-штабелёра, кран-штабелёр для загрузки ящиков с оптовым грузом на стеллаж, с другой стороны стеллажа установлены кран-штабелёр для перемещения ящика на свою площадку, манипулятор для выгрузки штучного товара в ящик на столе-конвейере, столы-конвейеры для постановки под загрузку ящиков для штучных грузов, конвейер для транспортировки ящиков до столов-конвейеров и до места загрузки ящиков в подвижной состав, манипулятор вверху или внизу между столами-конвейерами, или на опорах над конвейером, для выгрузки из ящика, на площадке крана-штабелёра, штучного груза в ящик на столе-конвейере, манипулятор для загрузки ящиков в подвижной состав и постановки его на транспортный путь. В результате обеспечиваются автоматические приём и передача груза, его складирование, сортировка, формирование товарного и кассового чека, отправка груза по адресу без ручного труда. Увеличивается скорость сортировки и отправки груза по адресу назначения. Уменьшаются ошибки при сортировке груза, уменьшаются расходы на персонал, уходит ответственность за здоровье и гибель персонала, не нужны объединяющие коробки, целлофановые ленты и оборудование для консолидации груза на производственных предприятиях. Изобретение эффективнее всего использовать с малыми трубопроводными транспортными системами для передвижения грузов в ящиках. Способ и устройство переработки грузов без ручного труда может быть использован как склад, склад-магазин, магазин, как портовый, железнодорожный или таможенный терминал. 4 з.п. ф-лы, 16 ил.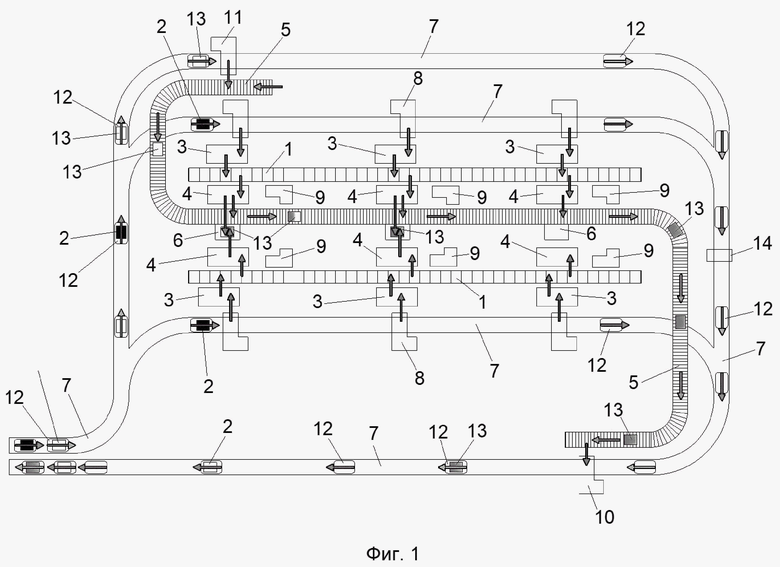
1. Система переработки грузов без ручного труда, содержащая стеллаж, однорядный или двухрядный, для ящиков, краны-штабелёры, конвейер, столы-конвейеры, транспортный путь, манипуляторы, отличающаяся тем, что с одной стороны стеллажа установлены транспортный путь для подачи подвижного состава, манипулятор для разгрузки из подвижного состава ящика с оптовым грузом на площадку крана-штабелёра, кран-штабелёр для загрузки ящиков с оптовым грузом на стеллаж, с другой стороны стеллажа установлены кран-штабелёр для перемещения ящика на свою площадку, манипулятор для выгрузки штучного товара в ящик на столе-конвейере, столы-конвейеры для постановки под загрузку ящиков для штучных грузов, конвейер для транспортировки ящиков до столов-конвейеров и до места загрузки ящиков в подвижной состав, манипулятор вверху или внизу между столами-конвейерами или на опорах над конвейером для выгрузки из ящика на площадке крана-штабелёра штучного груза в ящик на столе-конвейере, манипулятор для загрузки ящиков в подвижной состав и постановки его на транспортный путь.
2. Система переработки грузов без ручного труда по п.1, отличающаяся тем, что имеет следующую последовательность процесса сортировки оптового груза в штучный: транспортный путь доставляет подвижной состав с оптовым грузом до сектора разгрузки, где манипулятор выгружает ящик на кран-штабелёр и ставит подвижной состав обратно на транспортный путь, далее подвижной состав отправляется обратно к поставщику; кран-штабелёр ставит ящик в назначенное место на стеллаж; с другой стороны стеллажа, в секторе распределения, кран-штабелёр перемещает ящик с оптовым грузом на свою площадку; с площадки этого кран-штабелёра манипулятор захватывает штучный груз и доставляет в ящик, стоящий на столе-конвейере; на стол-конвейер ящик доставляет конвейер, а стол-конвейер, после загрузки, выталкивает ящик обратно на конвейер; заполняемый штучным товаром ящик следует до следующего стола-конвейера, чтобы загрузиться другим грузом, либо до сектора загрузки в подвижной состав, где манипулятор загружает ящик с грузом в ассортименте поштучно в подвижной состав и ставит его на транспортный путь.
3. Система переработки грузов без ручного труда по п.1, отличающаяся тем, что имеет следующую последовательность подачи порожних ящиков на конвейер для загрузки грузов поштучно: подвижной состав с порожними ящиками доставляется транспортным путём до сектора разгрузки пустых ящиков, в начале конвейера, где манипулятор выгружает порожний ящик на конвейер, ставит подвижной состав обратно на транспортный путь и подвижной состав по транспортному пути, через манипулятор регулировки очереди, следует до сектора загрузки ящиков в подвижной состав, в это же время порожний ящик, следуя по конвейеру от стола-конвейера до другого стола-конвейера, заполняется штучным грузом, когда ящик заполнится штучным грузом, он переместится в сектор, где манипулятор загрузит ящик со штучным грузом в подвижной состав, из которого ящик выгрузился, и поставит подвижной состав на транспортный путь.
4. Система переработки грузов без ручного труда по п.1, отличающаяся тем, что ящик содержит электронное устройство, которое, в свою очередь, содержит метку габаритов и положения ящика, пассивную или активную, электронный носитель обмена информацией, в свою очередь, содержащий постоянный адрес депо, бортовой номер ящика, бортовые номера подвижных составов, в которые может грузиться ящик, а также содержащий электронный носитель для переменной информации, в который вводится адрес доставки, вес груза, данные о грузе и производителе, электронный чек, сертификат и прочая необходимая информация.
5. Система переработки грузов без ручного труда по п.1, отличающаяся тем, что манипулятор соединён с захватом через весы, когда манипулятор поднимает груз из ящика, то компьютер управления получает данные о весе груза и вносит их в базу данных.
| ПОЧТОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НА МАГНИТНОМ ПОДВЕСЕ, УСТРОЙСТВО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ, УСТРОЙСТВО ЕЁ ПУНКТА ПОГРУЗКИ И РАЗГРУЗКИ, УСТРОЙСТВО ВЕРТИКАЛЬНОГО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ | 2018 |
|
RU2706615C2 |
| МАГНИТОЛЕВИТАЦИОННЫЙ СТРЕЛОЧНЫЙ ПЕРЕВОД БЕЗ МЕХАНИЧЕСКИХ И ПОДВИЖНЫХ УЗЛОВ | 2019 |
|
RU2745747C2 |
| EP 3473562 A1, 24.04.2019 | |||
| US 20210269244 A1, 02.09.2021 | |||
| US 20200087070 A1, 19.03.2020. | |||

