Настоящее изобретение относится к области нелинейной гидроакустики и может быть использовано для калибровки параметрического тракта гидролокатора.
Для излучения в параметрическом тракте гидролокатора используют два высокочастотных сигнала накачки на частотах ω1 и ω2, причем ω1>ω2. В результате взаимодействия излученных высокочастотных акустических сигналов с нелинейным слоем среды формируется сигнал на разностной частоте Ω1=ω1-ω2, который является копией излученного сигнала на несущей частоте ω1.
Формируемый сигнал на разностной частоте Ω1 претерпевает амплитудно-частотные искажения, обусловленные процессом его генерации (нелинейными свойствами среды), распространением в водной среде, влиянием излучающей и приемной аппаратуры параметрического тракта гидролокатора.
Неучет амплитудно-частотных искажений принимаемого эхосигнала на разностной частоте Ω1 при цифровой обработке, в частности при выполнении согласованной фильтрации, приводит к негативным последствиям, заключающимся в искажении отклика согласованного фильтра на полезный эхосигнал, что приводит к его расширению (ухудшается разрешающая способность по дальности) и возрастанию уровня боковых лепестков (увеличивается вероятность пропуска полезного сигнала с небольшой амплитудой), как следствие, ухудшаются технические характеристики гидролокатора.
Таким образом, важной задачей является проведение калибровки параметрического тракта гидролокатора, которая заключается в определении оптимальных параметров сигналов накачки, обеспечивающих минимальные амплитудно-частотные искажения сигнала на разностной частоте Ω1.
Известен способ (патент на изобретение РФ №2058561 «Способ калибровки параметрических излучающих антенн и устройство для его осуществления»), включающий излучение антенной высокочастотных акустических волн накачки на близких частотах ω1 и ω2, прием сигналов разностной частоты Ω1=ω1-ω2 измерительным гидрофоном, измерение амплитуд сигнала разностной частоты Ω1. В точке расположения измерительного гидрофона одновременно с излучением сигнала накачки дополнительно излучают непрерывный калибровочный высокочастотный сигнал на частоте ω3, которую выбирают из условия равенства чувствительности гидрофона на частотах ω1, ω2, ω3, а амплитуду сигнала на частоте ω3 путем регулирования уровня излучения устанавливают равной амплитуде сигналов на частотах ω1 и ω2.
В точке расположения измерительного гидрофона измеряют амплитуды дискретных составляющих U(Ω1), U(Ω2), U(Ω3) на частотах Ω1=ω1-ω2, Ω2=ω3-ω1, Ω3=ω3-ω2, сравнивают полученные величины и, если U(Ω1)>U(Ω2)=U(Ω3), делают вывод об акустическом происхождении принимаемого сигнала, а при U(Ω1)=U(Ω2)=U(Ω3), делают вывод о том, что регистрируется паразитный сигнал. Сигнал U(Ω1) акустического происхождения используют для измерения характеристики направленности излучающей параметрической антенны и амплитудно-частотной характеристики излучаемого сигнала.
К недостаткам данного способа-аналога следует отнести использование дополнительного излучателя высокочастотного калибровочного сигнала, который должен иметь стабильные характеристики для выполнения калибровки. Кроме того, при калибровке измерительный гидрофон расположен в дальней зоне излучающей антенны, что требует обеспечения большого значения отношения «сигнал/помеха» и препятствует калибровке в случае моностатической гидролокации, когда излучающая высокочастотная и низкочастотная приемная антенна расположены рядом.
Также недостатком рассматриваемого способа-аналога является отсутствие возможности учета меняющихся в пространстве нелинейных свойств водной среды, обуславливающих генерацию полезного низкочастотного сигнала на разностной частоте Ω1=ω1-ω2.
Наиболее близким аналогом к предлагаемому способу является способ калибровки параметрического тракта гидролокатора (Foote К., Francis Т., Atkins P. Calibration sphere for low-frequency parametric sonar // JASA. 2007. Vol. 121, №3. P. 1482-1489), в котором: производят калибровку параметрического тракта гидролокатора в заданном районе акватории, размещают эталонный отражающий объект на известном расстоянии от антенн гидролокатора, для излучения используют два сигнала накачки - тональный сигнал с несущей частотой ω2 и частотно-модулированный сигнал с несущей частотой ω1 и девиацией частоты Δω, в пределах полосы пропускания излучающей высокочастотной антенны гидролокатора, излучают сигналы на частотах ω1 и ω2 в сторону эталонного отражающего объекта, принимают эхосигналы на разностной частоте Ω1=ω1-ω2 с помощью низкочастотной приемной антенны, выполняют полосовую фильтрацию принятых эхосигналов, оценивают коэффициент обратного рассеяния от эталонного отражающего объекта в полосе частот приема.
Существенным недостатком данного способа-прототипа является отсутствие возможности оптимизации параметров сигналов накачки, в результате невозможно минимизировать амплитудно-частотные искажения эхосигнала на разностной частоте Ω1, что приводит к снижению отношения «сигнал/помеха» при обработке эхосигналов и ухудшению технических характеристик гидролокатора (снижению разрешающей способности по дальности, а также к увеличению вероятности пропуска полезного эхосигнала).
Наиболее близким аналогом к предлагаемому устройству является устройство для калибровки параметрического тракта гидролокатора (Foote К., Francis Т., Atkins P. Calibration sphere for low-frequency parametric sonar // JASA. 2007. Vol. 121, №3. P. 1482-1489).
Указанное устройство содержит эталонный отражающий объект, высокочастотную излучающую антенну и низкочастотную приемную антенну, передающий блок, приемный блок, блок цифровой обработки сигналов, блок управления. При этом эталонный отражающий объект не имеет соединений, вход высокочастотной излучающей антенны соединен с выходом передающего блока, выход низкочастотной приемной антенны соединен с входом приемного блока, выход которого соединен с входом блока цифровой обработки эхосигналов, выход которого соединен с входом блока управления. Выход блока управления соединен с входом приемного блока и передающего блока, блока цифровой обработки.
Устройство-прототип обладает существенным недостатком, заключающимся в отсутствии возможностей управления параметрами сигналов накачки, излучаемых в водную среду, а также параметрами согласованного фильтра в приемном блоке для выполнения согласованной фильтрации, что не позволяет минимизировать амплитудно-частотные эхосигналы на разностной частоте, обусловленные распространением в водной среде с меняющимися нелинейными свойствами и аппаратурой параметрического тракта гидролокатора.
Задача изобретения состоит в уменьшении искажений отклика согласованного фильтра на полезный эхосигнал в параметрическом тракте гидролокатора.
Технический результат заключается в оптимизации параметров сигналов накачки, излучаемых в водную среду, для обеспечения минимальных амплитудно-частотных искажений.
Для обеспечения указанного технического результата в известный способ калибровки параметрического тракта гидролокатора, в котором: производят калибровку параметрического тракта гидролокатора в заданном районе акватории, размещают эталонный отражающий объект на известном расстоянии от антенн гидролокатора, для излучения используют два сигнала накачки - тональный сигнал с несущей частотой ω2 и частотно-модулированный сигнал с несущей частотой ω1 и девиацией частоты Δω, в пределах полосы пропускания излучающей высокочастотной антенны гидролокатора, излучают сигналы на частотах ω1 и ω2 в сторону эталонного отражающего объекта, принимают эхосигналы на разностной частоте Ω1=ω1-ω2 с помощью низкочастотной приемной антенны, выполняют полосовую фильтрацию принятых эхосигналов, оценивают коэффициент обратного рассеяния от эталонного отражающего объекта в полосе частот приема, введены новые признаки:
- производят N циклов зондирования;
- для калибровки в каждом цикле зондирования: устанавливают параметры сигналов накачки для излучения в сторону эталонного отражающего объекта - несущую частоту ω1(n) и девиацию частоты Δω(n) частотно-модулированного сигнала и несущую частоту ω2(n) тонального сигнала,  , выполняют расчет коэффициентов согласованного фильтра, исходя из параметров излученных сигналов накачки, оценивают максимальное значение A(n) и ширину ΔB(n) по уровню 0.5 от значения A(n) отклика согласованного фильтра на эхосигнал от эталонного отражающего объекта;
, выполняют расчет коэффициентов согласованного фильтра, исходя из параметров излученных сигналов накачки, оценивают максимальное значение A(n) и ширину ΔB(n) по уровню 0.5 от значения A(n) отклика согласованного фильтра на эхосигнал от эталонного отражающего объекта;
- после выполнения N циклов зондирования производят пороговую обработку полученных значений ΔB(n)≤ΔB0, среди значений ΔB, меньших порога ΔB0, выбирают значение с наибольшим параметром A и запоминают номер цикла зондирования n0, соответствующий выбранному значению, отбирают оптимальные параметры сигналов накачки ω1(n0), ω2(n0), Δω(n0), обеспечивающие минимальные амплитудно-частотные искажения сигнала на выходе согласованного фильтра, рассчитывают коэффициенты импульсной характеристики согласованного фильтра для оптимальных параметров сигналов накачки и запоминают их;
- при работе параметрического тракта гидролокатора для излучения используют сигналы накачки с оптимальными параметрами ω1(n0), ω2(n0), Δω(n0), для выполнения согласованной обработки принимаемых эхосигналов применяют коэффициенты импульсной характеристики согласованного фильтра для оптимальных параметров сигналов накачки.
Для обеспечения указанного технического результата в известное устройство для калибровки параметрического тракта гидролокатора, содержащее эталонный отражающий объект, высокочастотную излучающую антенну и низкочастотную приемную антенну, передающий блок, приемный блок, блок цифровой обработки сигналов, блок управления, при этом эталонный отражающий объект не имеет соединений, вход высокочастотной излучающей антенны соединен с выходом передающего блока, выход низкочастотной приемной антенны соединен с входом приемного блока, выход которого соединен с входом блока цифровой обработки эхосигналов, выход которого соединен с входом блока управления, выход блока управления соединен с входом приемного блока и передающего блока, блока цифровой обработки, отличающееся тем, что
- в передающем устройстве используют два управляемых генератора для выработки сигналов накачки;
- в блоке цифровой обработки сигналов используют управляемый согласованный фильтр;
- дополнительно введен блок калибровки, причем вход блока калибровки соединен с выходом блока цифровой обработки сигналов, выход блока калибровки соединен с входом блока управления.
Таким образом, проведение калибровки параметрического тракта параметрического гидролокатора позволяет определить оптимальные значения параметров сигналов накачки с учетом влияния среды распространения и амплитудно-частотных характеристик аппаратуры параметрического тракта гидролокатора для обеспечения минимальных амплитудно-частотных искажений отклика согласованного фильтра на полезный эхосигнал.
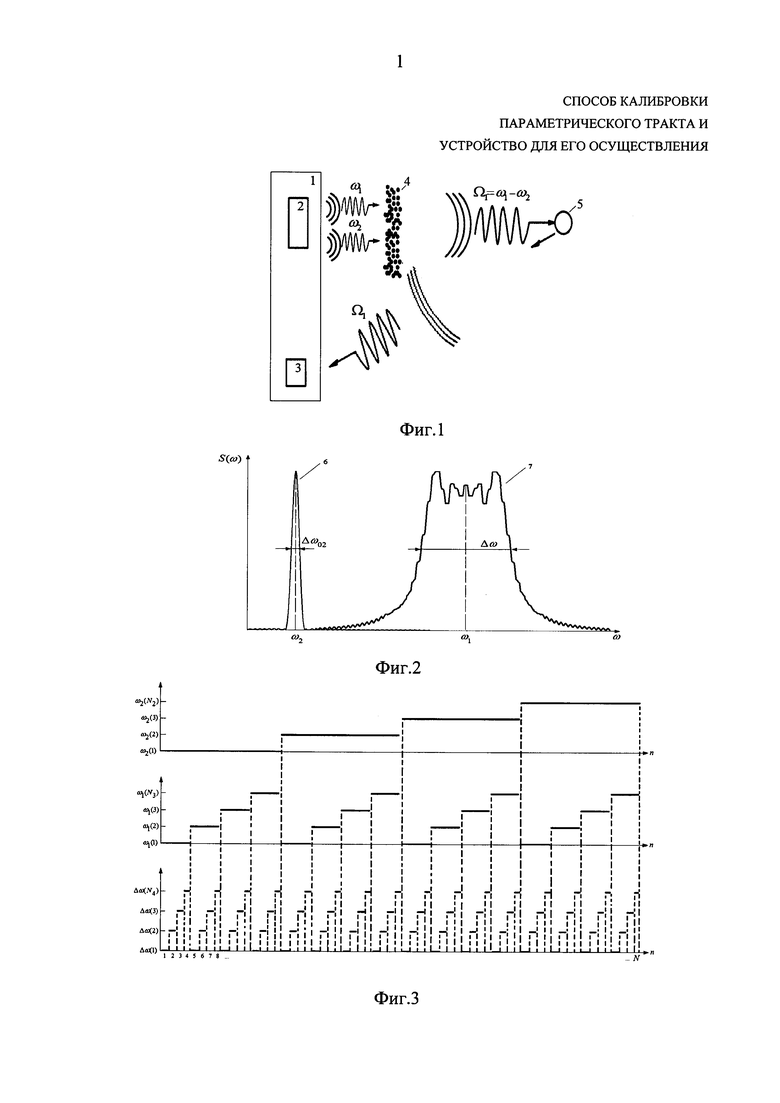
Реализация данного способа поясняется фиг. 1-4.
На фиг. 1 показана геометрия задачи калибровки параметрического тракта, на которой представлены - подводный объект 1, высокочастотная излучающая антенна 2, низкочастотная приемная антенна 3, нелинейный слой водной среды 4, эталонный отражающий объект 5.
На фиг. 2 показаны типовые амплитудные спектры излучаемых сигналов накачки: 6 - амплитудный спектр тонального сигнала на несущей частоте ω2, 7 - амплитудный спектр частотно-модулированного сигнал на несущей частоте ω1.
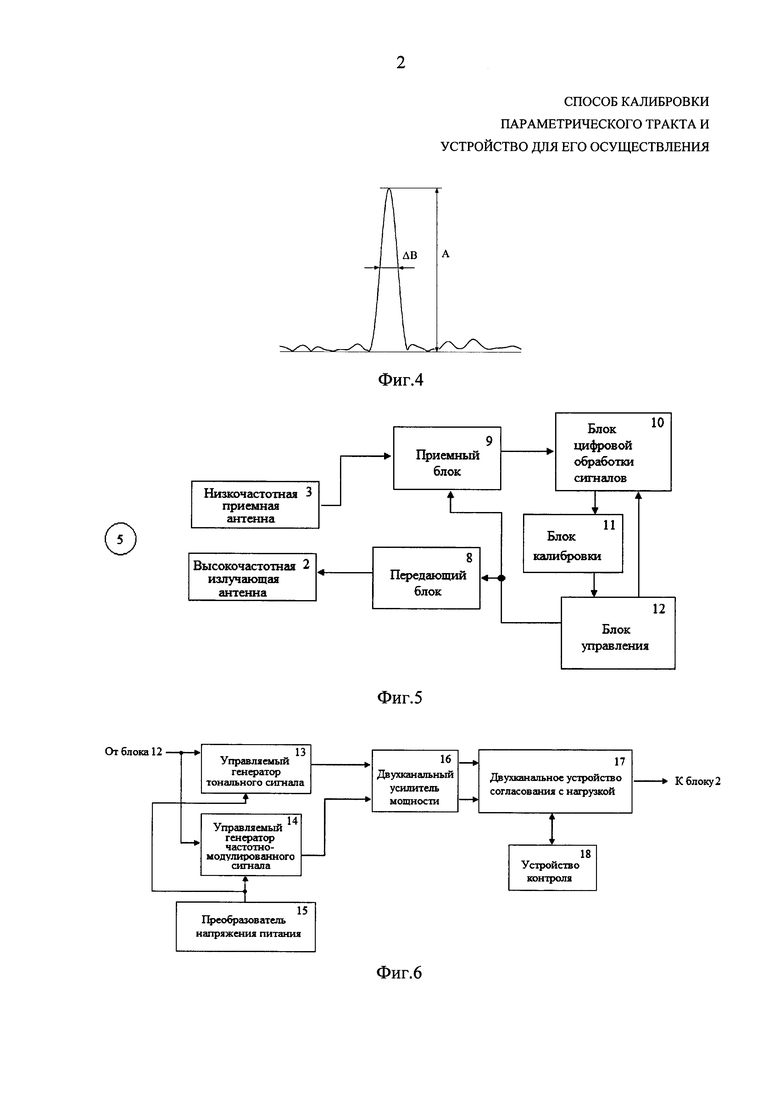
На фиг. 3 показано изменение оптимизируемых параметров в процессе калибровки.
На фиг. 4 показан отклик согласованного фильтра во временной области на принятый эхосигнал на разностной частоте.
Предложенный способ реализуется следующим образом: производят калибровку параметрического тракта гидролокатора в заданном районе акватории, в водной среде (фиг. 1) устанавливают эталонный отражающий объект 5 на известном расстоянии от антенн гидролокатора 2 и 3, располагаемого на подводном объекте 1.
В качестве эталонного отражающего объекта 5 используют сферический отражатель с радиусом a, изготовленный из стали, при этом значение a удовлетворяет условию a>>(λ/2π), где λ - длина акустической волны, падающей на объект 1. Также в качестве эталонного отражающего объекта можно использовать границы раздела «вода-лед» или «вода-воздух» при условии наличия сведений о степени их шероховатости.
В пределах полосы пропускания излучающей высокочастотной антенны гидролокатора 2 в сторону эталонного отражающего объекта 5 излучают сигналы накачки (фиг. 2) - тональный сигнал с несущей частотой ω2 и частотно-модулированный сигнал с несущей частотой ω1 и девиацией частоты Δω.
Учитывая изменчивый характер нелинейных свойств участка водной среды, генерирующего в результате взаимодействия сигналов накачки полезный сигнал на разностной частоте, а также частотно-зависимый характер процессов шумообразования и распространения акустических волн в водной среде, оптимизации подлежат следующие параметры сигналов накачки: несущая частота ω1 и девиация частоты Δω частотно-модулированного сигнала, и несущая частота ω2 тонального сигнала.
Производят калибровку параметрического тракта гидролокатора за N циклов зондирования.
Для калибровки в каждом n-ом цикле зондирования устанавливают параметры сигналов накачки (фиг. 3) для излучения в сторону эталонного отражающего объекта 5 - несущую частоту ω1(n) и девиацию частоты Δω(n) частотно-модулированного сигнала и несущую частоту ω2(n) тонального сигнала, которые определяют по формулам:



Где
N2 - число градаций несущей частоты ω1 тонального сигнала;
N3 - число градаций разностной частоты ω1-ω2;
N4 - число градаций девиации частоты частотно-модулированного сигнала накачки с несущей частотой ω2;
int [.] - оператор, производящий выделение целой части от числа;
mod (x,y) - оператор, вычисляющий число x по модулю числа y;
ω02 - начальное значение несущей частоты ω2 тонального сигнала накачки;
Δω0 - начальное значение девиации частоты;
Δω2 - шаг изменения частоты ω1;
Δω1 - шаг изменения разностной частоты ω1-ω2;
Δω01 - шаг изменения девиации частоты.
Параметры N2, N3, N4, ω02, Δω0, Δω2, Δω1, Δω01 устанавливают до начала калибровки.
Устанавливаемые значения N2, N3, N4 должны быть кратны 2 и удовлетворять условиям:

Исходя из условий (4), число N определяется числом градаций N2, N3, N4 оптимизируемых параметров сигналов накачки.
Также есть ограничения для значений ω02 и ω1(N):


где
Δω02 - ширина спектра тонального сигнала накачки 6 (фиг. 2);
ωн и ωв - левая и правая границы полосы пропускания высокочастотной излучающей антенны 2 соответственно.
В результате взаимодействия излученных сигналов накачки с нелинейным слоем водной среды 4 образуется частотно-модулированный сигнал с несущей частотой Ω1(n)=ω1(n)-ω2(n) и девиацией частоты Δω(n), который отражается от эталонного отражающего объекта 5, принимают эхосигналы на частоте Ω1(n)=ω1(n)-ω2(n) с помощью низкочастотной приемной антенны 3.
Производят полосовую фильтрацию принятых эхосигналов на частоте Ω1(n)=ω1(n)-ω2(n).
Исходя из известной дальности R до эталонного отражающего объекта 5 рассчитывают границы строба для выделения полезного эхосигнала по формуле:

где
τu - длительность излучаемого частотно-модулированного импульса,
 - частота дискретизации АЦП.
- частота дискретизации АЦП.
Значения τu и являются техническими характеристиками гидролокатора.
Выполняют известную процедуру расчета коэффициентов импульсной характеристики согласованного фильтра для частотно-модулированного сигнала с несущей частотой Ω1(n)=ω1(n)-ω2(n) и девиацией частоты Δω(n) (Баскаков С.И. Радиотехнические цепи и сигналы. - М.: Высшая школа, 1988. С. 105, С. 420).
Выполняют согласованную фильтрацию:

где
z - амплитуда эхосигналов, принятых низкочастотной приемной антенной 3,
h - импульсная характеристика согласованного фильтра,
m - номер выборки АЦП.
Для оценки амплитудно-частотных искажений оценивают максимальное значение A(n) и ширину ΔB(n) по уровню 0.5 от значения A(n) отклика согласованного фильтра B на эхосигнал (фиг. 4) от эталонного отражающего объекта 5.
Значение A(n) позволяет оценить эффективность преобразования излученных сигналов накачки в сигнал на разностной частоте, а значение ΔB(n) - частотно-избирательные свойства водной среды с учетом влияния аппаратуры параметрического тракта гидролокатора.
После выполнения N циклов зондирования производят пороговую обработку полученных значений:

где
 - пороговое значение.
- пороговое значение.
Среди значений ΔB, меньших порога ΔB0 (9), выбирают значение с наибольшим параметром A и запоминают номер цикла зондирования n0, соответствующий выбранному значению.
В результате выполнения калибровки отбирают оптимальные параметры сигналов накачки ω1(n0), ω2(n0), Δω(n0), обеспечивающие минимальные амплитудно-частотные искажения сигнала на выходе согласованного фильтра, а также рассчитывают соответствующие коэффициенты импульсной характеристики согласованного фильтра для выполнения обработки принимаемых эхосигналов.
При работе параметрического тракта гидролокатора для излучения используют сигналы накачки с оптимальными параметрами ω1(n0), ω2(n0), Δω(n0), для выполнения согласованной обработки принимаемых эхосигналов применяют коэффициенты импульсной характеристики согласованного фильтра для оптимальных параметров сигналов накачки.
Реализация устройства, реализующего предлагаемый способ, поясняется фиг. 5-9.
На фиг. 5 представлена структурная блок-схема устройства для калибровки параметрического тракта гидролокатора.
На фиг. 6 представлена структурная блок-схема приемного блока.
На фиг. 7 представлена структурная блок-схема передающего блока.
На фиг. 8 представлена структурная блок-схема блока цифровой обработки сигналов.
На фиг 9. представлена структурная блок-схема блока калибровки.
Устройство (фиг. 5) состоит из высокочастотной излучающей антенны 2, низкочастотной приемной антенны 3, эталонного отражающего объекта 5, передающего блока 8, приемного блока 9, блока 10 цифровой обработки сигналов, блока 11 калибровки, блока 12 управления.
Эталонный отражающий объект 5 не имеет соединений, вход высокочастотной излучающей антенны 2 соединен с выходом передающего блока 8, выход низкочастотной приемной антенны 3 соединен с входом приемного блока 9, выход которого соединен с входом блока 10 цифровой обработки эхосигналов, выход блока 10 соединен с входом блока 11 калибровки, выход блока 11 соединен с входом блока 12 управления. Выход блока 12 управления соединен с входом приемного блока 9 и передающего блока 8, блока 10 цифровой обработки.
Передающий блок 5 (фиг. 6) состоит из управляемого генератора тонального сигнала 13, управляемого генератора частотно-модулированного сигнала 14, двухканального усилителя 16 мощности, двухканального устройства 17 согласования с нагрузкой, преобразователя 15 напряжения питания, устройства 18 контроля.
Управляемый генератор 13 тонального сигнала и управляемый генератор 14 частотно-модулированного сигнала выполнены на базе микросхем прямого цифрового синтеза ИС AD9912.
Приемный блок 9 (фиг. 7) состоит из полосового фильтра 19, усилителя 20, аналогово-цифрового преобразователя 21, устройства 22 контроля.
Блок 10 цифровой обработки сигналов (фиг. 8) состоит из интерфейсного блока 23, управляемого согласованного фильтра 24, блока 25 расчета дальности до цели. Блок 10 цифровой обработки, в том числе и управляемый согласованный фильтр 24, реализован на базе программируемой логической интегральной схемы ALTERA EP3C16Q240C8 и сигнального процессора ADSP 21368.
Блок 11 калибровки (фиг. 9) состоит блока 26 оценки параметров отклика согласованного фильтра, блока 27 накопления, решающего устройства 28. Блок 11 калибровки реализован на сигнальном процессоре ADSP 21368.
Блок 12 управления состоит из процессорного устройства, оперативного запоминающего устройства и кварцевого генератора.
Устройство работает следующим образом. При выполнении калибровки параметрического тракта гидролокатора в каждом цикле зондирования по командным импульсам, вырабатываемым блоком управления, в передающем блоке 8 (фиг. 6) двумя управляемыми генераторами 13 и 14 осуществляется формирование двух электрических сигналов (тонального и частотно-модулированного) с установленными параметрами (несущие частоты и девиация частоты частотно-модулированного сигнала), которые преобразуются в акустические импульсы высокочастотной излучающей антенной 2 и излучаются в сторону эталонного отражающего объекта 5. Прием и преобразование в электрические сигналы осуществляется низкочастотной приемной антенной 3. Принятые электрические сигналы от низкочастотной приемной антенны 32, поступают на приемный блок 9 (фиг. 7), где выполняется полосовая фильтрация, усиление и аналого-цифровое преобразование.
Далее блок 12 управления выдает в блок 10 команду на установку коэффициентов согласованного фильтра, соответствующих параметрам излученных сигналов накачки. Затем оцифрованные данные поступают в блок 10 цифровой обработки сигналов (фиг. 8), где выполняется согласованная фильтрация и расчет дальности до цели. С выхода блока 10 данные обработки эхосигналов поступают в блок 11 калибровки (фиг. 9).
В блоке 11 калибровки производится оценка параметров отклика согласованного фильтра на полезный эхосигнал и накопление полученных данных, а также выбор оптимальных параметров сигналов накачки из набора данных по совокупности выполненных циклов зондирования. После чего вычисленные оптимальные значения параметров сигналов накачки поступают в блок 12 управления для дальнейшей работы гидролокатора.
Поясним работу блока 11.
В блоке 26 оценки параметров отклика согласованного фильтра производится оценка максимального значения A и ширины ΔB по уровню 0.5 от максимального значения отклика согласованного фильтра. В блоке 27 накопления производится накопление значений A и ΔB, полученных за N циклов зондирования. В решающем устройстве 28 производится анализ накопленных значений A и ΔB для выбора оптимальных значений сигналов накачки для дальнейшей работы гидролокатора.
Предложены способ и устройство калибровки параметрического тракта гидролокатора, позволяющие уменьшить амплитудно-частотные искажения отклика согласованного фильтра на полезный эхосигнал путем оптимизации параметров излучаемых в водную среду сигналов накачки: несущая частота тонального сигнала накачки, несущая частота и девиация частоты частотно-модулированного сигнала накачки.
Таким образом, технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР | 1995 |
|
RU2097785C1 |
| СПОСОБ РАСПОЗНАВАНИЯ МАТЕРИАЛОВ АКУСТИЧЕСКИХ ЦЕЛЕЙ | 2016 |
|
RU2635829C2 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛЕДОМЕР | 2015 |
|
RU2664981C2 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2014 |
|
RU2553730C1 |
| Параметрический профилограф | 2023 |
|
RU2814150C1 |
| Активный гидролокатор | 2019 |
|
RU2719214C1 |
| ФАЗОВЫЙ ПАРАМЕТРИЧЕСКИЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 1992 |
|
RU2039366C1 |
| Акустический способ для исследования поля скорости течений и морского волнения на прибрежной акватории | 2024 |
|
RU2840135C1 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2015 |
|
RU2590226C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИСТАНЦИЙ ДО КРОМОК СУДОХОДНОЙ ПОЛОСЫ И ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА НЕЙ | 1991 |
|
RU2006874C1 |

Настоящее изобретение относится к области нелинейной гидроакустики и может быть использовано для калибровки параметрического тракта гидролокатора. Задача изобретения состоит в уменьшении искажений отклика согласованного фильтра на полезный эхосигнал в параметрическом тракте гидролокатора. Технический результат заключается в оптимизации параметров сигналов накачки, излучаемых в водную среду, для обеспечения минимальных амплитудно-частотных искажений. Предложены способ и устройство калибровки параметрического тракта гидролокатора, позволяющие уменьшить амплитудно-частотные искажения отклика согласованного фильтра на полезный эхосигнал путем оптимизации параметров излучаемых в водную среду сигналов накачки: несущая частота тонального сигнала накачки, несущая частота и девиация частоты частотно-модулированного сигнала накачки. Устройство для калибровки параметрического тракта гидролокатора содержит эталонный отражающий объект, высокочастотную излучающую антенну и низкочастотную приемную антенну, передающий блок, приемный блок, блок цифровой обработки сигналов, блок управления. 2 н.п. ф-лы, 9 ил.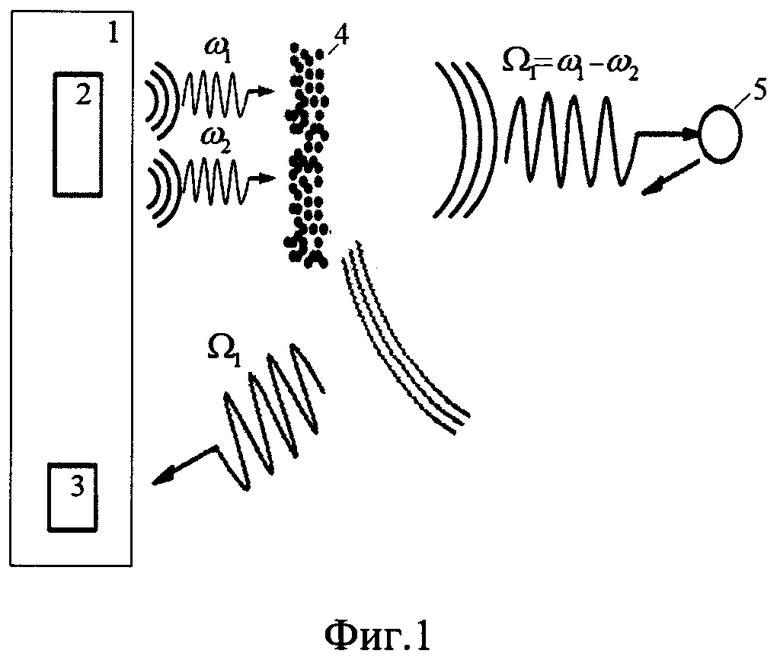
1. Способ калибровки параметрического тракта, в котором: производят калибровку параметрического тракта гидролокатора в заданном районе акватории, размещают эталонный отражающий объект на известном расстоянии от антенн гидролокатора, для излучения используют два сигнала накачки - тональный сигнал с несущей частотой ω2 и частотно-модулированный сигнал с несущей частотой ω1 и девиацией частоты Δω, в пределах полосы пропускания излучающей высокочастотной антенны гидролокатора, излучают сигналы на частотах ω1 и ω2 в сторону эталонного отражающего объекта, принимают эхосигналы на разностной частоте  с помощью низкочастотной приемной антенны, выполняют полосовую фильтрацию принятых эхосигналов, оценивают коэффициент обратного рассеяния от эталонного отражающего объекта в полосе частот приема, отличающийся тем, что производят N циклов зондирования, для калибровки в каждом цикле зондирования устанавливают параметры сигналов накачки для излучения в сторону эталонного отражающего объекта - несущую частоту ω1(n) и девиацию частоты Δω(n) частотно-модулированного сигнала и несущую частоту ω2(n) тонального сигнала,
с помощью низкочастотной приемной антенны, выполняют полосовую фильтрацию принятых эхосигналов, оценивают коэффициент обратного рассеяния от эталонного отражающего объекта в полосе частот приема, отличающийся тем, что производят N циклов зондирования, для калибровки в каждом цикле зондирования устанавливают параметры сигналов накачки для излучения в сторону эталонного отражающего объекта - несущую частоту ω1(n) и девиацию частоты Δω(n) частотно-модулированного сигнала и несущую частоту ω2(n) тонального сигнала,  , выполняют расчет коэффициентов согласованного фильтра, исходя из параметров излученных сигналов накачки; оценивают максимальное значение А(n) и ширину ΔВ(n) по уровню 0,5 от значения А(n) отклика согласованного фильтра на эхосигнал от эталонного отражающего объекта, после выполнения N циклов зондирования производят пороговую обработку полученных значений ΔB(n)≤ΔB0, среди значений ΔВ, меньших порога ΔB0, выбирают значение с наибольшим параметром А и запоминают номер цикла зондирования n0, соответствующий выбранному значению, отбирают оптимальные параметры сигналов накачки ω1(n0), ω2(n0), Δω(n0), обеспечивающие минимальные амплитудно-частотные искажения сигнала на выходе согласованного фильтра, рассчитывают коэффициенты импульсной характеристики согласованного фильтра для оптимальных параметров сигналов накачки и запоминают их, при работе параметрического тракта гидролокатора для излучения используют сигналы накачки с оптимальными параметрами ω1(n0), ω2(n0), Δω(n0), для выполнения согласованной обработки принимаемых эхосигналов применяют коэффициенты импульсной характеристики согласованного фильтра для оптимальных параметров сигналов накачки.
, выполняют расчет коэффициентов согласованного фильтра, исходя из параметров излученных сигналов накачки; оценивают максимальное значение А(n) и ширину ΔВ(n) по уровню 0,5 от значения А(n) отклика согласованного фильтра на эхосигнал от эталонного отражающего объекта, после выполнения N циклов зондирования производят пороговую обработку полученных значений ΔB(n)≤ΔB0, среди значений ΔВ, меньших порога ΔB0, выбирают значение с наибольшим параметром А и запоминают номер цикла зондирования n0, соответствующий выбранному значению, отбирают оптимальные параметры сигналов накачки ω1(n0), ω2(n0), Δω(n0), обеспечивающие минимальные амплитудно-частотные искажения сигнала на выходе согласованного фильтра, рассчитывают коэффициенты импульсной характеристики согласованного фильтра для оптимальных параметров сигналов накачки и запоминают их, при работе параметрического тракта гидролокатора для излучения используют сигналы накачки с оптимальными параметрами ω1(n0), ω2(n0), Δω(n0), для выполнения согласованной обработки принимаемых эхосигналов применяют коэффициенты импульсной характеристики согласованного фильтра для оптимальных параметров сигналов накачки.
2. Устройство для калибровки параметрического тракта, содержащее эталонный отражающий объект, высокочастотную излучающую антенну и низкочастотную приемную антенну, передающий блок, приемный блок, блок цифровой обработки сигналов, блок управления, при этом эталонный отражающий объект не имеет соединений, вход высокочастотной излучающей антенны соединен с выходом передающего блока, выход низкочастотной приемной антенны соединен с входом приемного блока, выход которого соединен с входом блока цифровой обработки эхосигналов, выход которого соединен с входом блока управления, выход блока управления соединен с входом приемного блока и передающего блока, блока цифровой обработки, отличающееся тем, что в передающем устройстве используют два управляемых генератора для выработки сигналов накачки, в блоке цифровой обработки сигналов используют управляемый согласованный фильтр, дополнительно введен блок калибровки, причем вход блока калибровки соединен с выходом блока цифровой обработки сигналов, выход блока калибровки соединен с входом блока управления.
| Kenneth G | |||
| Foote, david T.I | |||
| Francis, Philip R | |||
| Atkins | |||
| Calibration sphere for low-frequency parametric sonar | |||
| J | |||
| Acoust | |||
| Soc | |||
| Am | |||
| Ребристый каток | 1922 |
|
SU121A1 |
| СПОСОБ КАЛИБРОВКИ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ С ПАРАМЕТРИЧЕСКИМИ ПРИЕМНЫМИ АНТЕННАМИ | 2006 |
|
RU2308053C1 |
| RU2058561 C1, 20.04.1996 | |||
| US3882444 A1, 06.05.1975 | |||
| US3866159 A1, 11.02.1975. | |||

