Изобретение относится к области летательных аппаратов (ЛА), а именно, к способам оборудования беспилотных летательных аппаратов (БЛА) для установки, перемещения и сброса грузов.
Известно изобретение под названием «Устройство фиксации или сброса объемных тел для сверхлегких летательных аппаратов» (п. РФ №2587318, МПК B64D 1/10, опубл. 2016 г.), в котором описан способ фиксации, заключающийся в фиксации сбрасываемых грузов к корпусу летательного аппарата на одну из нижних его неподвижных поверхностей. К корпусу крепится основная деталь системы крепления, в которую устанавливается исполнительный механизм. Рабочая часть основной детали представляет собой параллелепипед, вытянутый в направлении под 90 градусов к основной детали. К рабочей поверхности исполнительного механизма крепится штырь затвора, диаметр которого рассчитывается в зависимости от переносимого груза. Для фиксации груза на нем устанавливается кольцо, которое вставляется в паз рабочей части основной детали и закрепляется штырем затвора. В процессе переноса груз может удерживаться только штырем затвора или иметь дополнительные направляющие для исключения вибраций и раскачиваний. Для произведения отцепления груза исполнительный механизм передвигает штырь затвора таким образом, чтобы груз больше не удерживался штырем. При этом груз или остается на месте установки или перемещается вниз под действием силы тяжести.
Данное техническое решение предназначено для сверхлегкого БЛА, отличается простотой в техническом исполнении, малым весом, минимальным числом подвижным элементов, удобством и безопасностью монтажа, а также использованием маломощных исполнительных механизмов, потребление энергии которых не сказывается на работу ЛА в целом.
Однако, данное устройство не позволяет проводить точный сброс груза при скоростном полете БЛА (без его зависания над местом сброса), существенно повышает лобовое сопротивление БЛА и не позволяет корректировать балансировку БЛА после сброса груза.
Наиболее близким аналогом заявляемого изобретения, выбранным в качестве прототипа, является способ транспортировки и сброса грузов (п. РФ №2513079, МПК B64D 1/10, 7/00, опубл. 2014 г.), заключающийся в том, что сбрасываемые грузы размещают в БЛА с возможностью перемещения в сбрасывающую часть. В грузовом отсеке ЛА располагают контейнер, в котором размещают грузы с возможностью продольного скольжения. Контейнер расположен в грузовом отсеке ЛА с возможностью продольного передвижения. Сбрасывающая часть является частью контейнера. Для сброса груза осуществляют передвижение контейнера в ЛА продольно назад (в направлении, противоположном полету) таким образом, чтобы сбрасывающая часть находилась снаружи ЛА, подают груз в сбрасывающую часть и в этом положении выталкивают его.
Данное изобретение позволяет без использования парашюта обеспечить безопасный сброс при снижении затрат и легкой адаптации для любого типа транспортного ЛА. Отсутствует замедление груза после сброса (не требуется встраивание системы повторного разгона ракеты), нет сбрасываемого оборудования, в отличие от сброса с парашютом, что обеспечивает некоторую оперативную скрытность, а, т.к., сбрасывающая часть находится снаружи ЛА, опасность столкновения с ним сильно снижается, а также достигается расширение радиуса сброса.
Однако, данный способ не позволяет проводить точный сброс груза (боеприпаса) на цель; требует применения прицельного приспособления, учитывающего скорость и высоту, тангаж полета ЛА; предполагает ограничение на расположение двигательной установки ЛА в конце фюзеляжа.
Задача, на решение которой направлено данное изобретение, - сохранение управляемости БЛА после сброса груза, повышение точности выброса груза.
Технический результат, полученный при использовании предлагаемого технического решения, - сохранение балансировки БЛА после сброса груза.
Указанный технический результат достигается тем, что грузы размещают в носовой части БЛА последовательно друг за другом с возможностью поочередной фиксации каждого крайнего к сбрасывающей части груза, при этом за последним грузом размещают часть внутренних элементов БЛА с возможностью их перемещения в носовую часть БЛА при сбрасывании каждого груза.
Дня повышения точности сброса груза в заданную точку (цель) сброс проводят в направлении полета БЛА, например, при пикировании БЛА на цель.
Размещение сбрасываемого груза и его сброс из носовой части фюзеляжа БЛА позволяет наиболее точным образом направить сбрасываемый груз на цель, однозначно формируя траекторию его полета в цель. После сброса груза БЛА отворачивает в сторону от цели.
Для снижения лобового сопротивления БЛА и повышения его управляемости применяют сбрасывающую часть, которая составляет выпуклую аэродинамическую поверхность вместе с крайним сбрасываемым грузом в носовой части БЛА, а также за последним сбрасываемым грузом размещают внутренний элемент БЛА, который составляет выпуклую аэродинамическую поверхность вместе с сбрасывающей частью.
Для повышения точности выброса груза для сброса каждого из грузов применяют пороховой двигатель с тыльной стороны груза.
В настоящее время приобрело широкое распространение использование БЛА для доставки различных грузов как в гражданских целях (посылки), так и в военных целях (сброс боеприпасов). Если для мультикоптеров вопрос балансировки самого БЛА при сбросе груза не представляет существенных трудностей, то для скоростных БЛА, использующих самолетную или ракетную аэродинамическую схему, вопрос балансировки БЛА после сброса груза представляет существенную проблему, в т.ч. в целях возврата БЛА на точку базирования. В предлагаемом изобретении сохранение балансировки БЛА осуществляется за счет перемещения оставшихся после сброса грузов и части внутренних элементов БЛА в носовую часть. При этом каждый крайний к сбрасывающей части груз поочередно фиксируют. Это обеспечивает сохранение аэродинамического сопротивления и характеристик БЛА после выброса груза, а также балансировку БЛА, когда центр давления сохраняет свою позицию за центром масс БЛА.
Все это позволяет сохранить управляемость БЛА и повысить точность выброса груза.
При анализе уровня техники не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам данного изобретения. А также не выявлено факта известности влияния признаков, включенных в формулу, на технический результат заявляемого технического решения. Следовательно, заявленное изобретение соответствует условиям «новизна» и «изобретательский уровень».
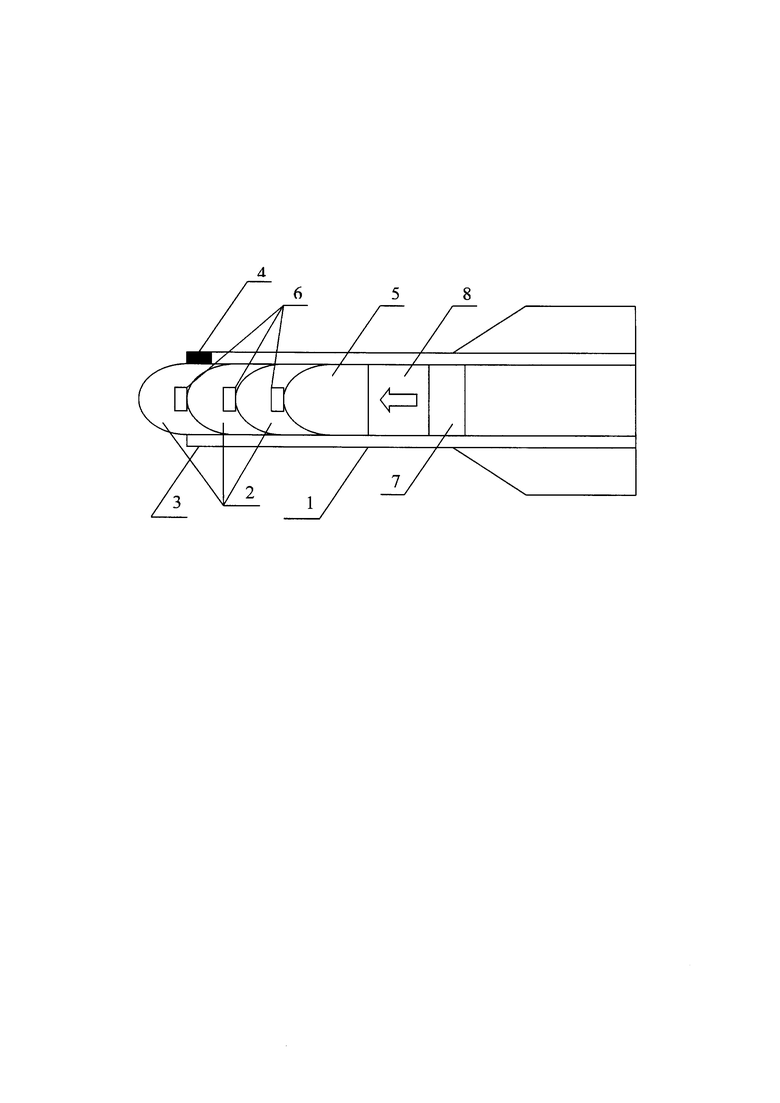
На фиг. представлена схема реализации предложенного способа.
В носовой части фюзеляжа 1 БЛА располагают сбрасываемые грузы 2 последовательно друг за другом. Грузы 2 размещают с возможностью перемещения в сбрасывающую часть 3, при этом каждый крайний к сбрасывающей части груз 2 поочередно фиксируют стопором 4. За последним грузом 2 размещают часть внутренних элементов 5 БЛА (например, аккумуляторные блоки и пр.) с возможностью их перемещения в носовую часть БЛА при сбрасывании каждого груза 2. Сброс грузов 2 проводят в направлении полета БЛА. Каждый груз 2 снабжен пороховым двигателем 6, установленным с его тыльной стороны.
Сбрасывающая часть 3 вместе с крайним сбрасываемым грузом 2 в носовой части БЛА образует выпуклую аэродинамическую поверхность. За последним сбрасываемым грузом 2 размещают внутренний элемент 5 БЛА, который вместе с сбрасывающей частью 3 образует выпуклую аэродинамическую поверхность.
При сбросе груза 2 стопор 4 временно отключается, по сигналу блока управления 7 срабатывает пороховой двигатель 6 и включается привод поступательного движения 8 оставшихся грузов и части внутренних элементов 5 БЛА. После выброса груза 2 вновь включается стопор 4. Таким образом, осуществляют последовательный разновременный выброс нескольких грузов 2 и выдвижение последующих грузов 2 вместе с внутренними элементами 5 БЛА.
Таким образом, представленные данные свидетельствуют о выполнении при использовании способа по заявляемому изобретению следующей совокупности условий:
- процесс, воплощающий заявленный способ при его осуществлении, предназначен для использования в авиационной технике, в частности, в ударных БЛА;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления.
Следовательно, заявляемый способ соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления по крену или тангажу при транспортировке легким и сверхлегким летательным аппаратом расходуемой по весу нагрузки (варианты) и легкий или сверхлегкий летательный аппарат с устройством управления по крену или тангажу при транспортировке расходуемой по весу нагрузки (варианты) | 2022 |
|
RU2796596C1 |
| Малый беспилотный летательный аппарат (варианты) | 2023 |
|
RU2824014C1 |
| ВОЗВРАЩАЕМЫЙ МНОГОРЕЖИМНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ИЗМЕНЯЕМЫМ ЗАПАСОМ СТАТИЧЕСКОЙ УСТОЙЧИВОСТИ | 2008 |
|
RU2384470C1 |
| СПОСОБ ЗАХВАТА ВОЗДУШНОЙ ЦЕЛИ СЕТЬЮ | 2020 |
|
RU2745590C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ТРАНСПОРТИРОВКИ ГРУЗОВ | 2023 |
|
RU2833448C1 |
| Модульная система раскладываемого крыла беспилотного летательного аппарата | 2023 |
|
RU2826532C1 |
| УСТРОЙСТВО ФИКСАЦИИ И СБРОСА ПОЛЕЗНОЙ НАГРУЗКИ ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830717C1 |
| Способ установки и крепления раскладываемого крыла беспилотного летательного аппарата | 2023 |
|
RU2826464C1 |
| СПОСОБ ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ ТЕРПЯЩИМ БЕДСТВИЕ ЛЮДЯМ В УДАЛЕННЫХ РАЙОНАХ С НЕТОЧНО ИЗВЕСТНЫМИ КООРДИНАТАМИ И РАКЕТНЫЙ КОМПЛЕКС ОПЕРАТИВНОЙ ДОСТАВКИ СРЕДСТВ СПАСЕНИЯ | 2016 |
|
RU2651350C1 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
Изобретение относится к области летательных аппаратов (ЛА), а именно к способам оборудования беспилотных летательных аппаратов (БЛА) для установки, перемещения и сброса грузов. Способ фиксации и сброса грузов для БЛА заключается в том, что сбрасываемые грузы размещают в БЛА с возможностью перемещения в сбрасывающую часть. Грузы размещают в носовой части БЛА последовательно друг за другом с возможностью поочередной фиксации каждого крайнего к сбрасывающей части груза. За последним грузом размещают часть внутренних элементов БЛА с возможностью их перемещения в носовую часть БЛА при сбрасывании каждого груза. Обеспечивается сохранение балансировки после сброса груза. 5 з.п. ф-лы, 1 ил.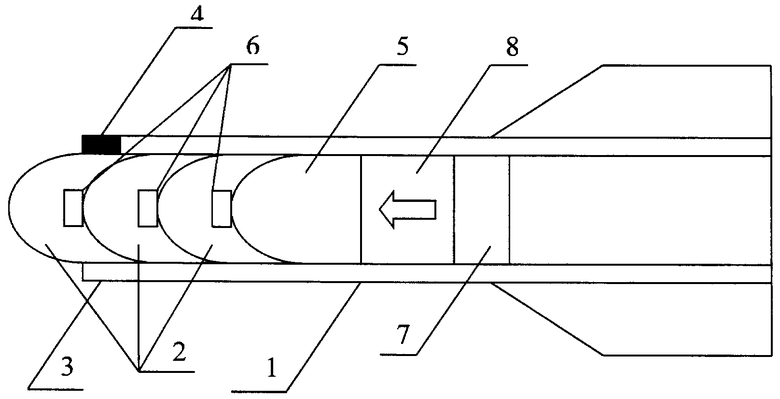
1. Способ фиксации и сброса грузов для беспилотного летательного аппарата, по которому сбрасываемые грузы размещают в беспилотном летательном аппарате с возможностью перемещения в сбрасывающую часть, отличающийся тем, что грузы размещают в носовой части беспилотного летательного аппарата последовательно друг за другом с возможностью поочередной фиксации каждого крайнего к сбрасывающей части груза, при этом за последним грузом размещают часть внутренних элементов беспилотного летательного аппарата с возможностью их перемещения в носовую часть беспилотного летательного аппарата при сбрасывании каждого груза.
2. Способ фиксации и сброса грузов для беспилотного летательного аппарата по п. 1, отличающийся тем, что сброс грузов проводят в направлении полета беспилотного летательного аппарата.
3. Способ фиксации и сброса грузов для беспилотного летательного аппарата по п. 1, отличающийся тем, что грузы размещают в носовой части фюзеляжа беспилотного летательного аппарата.
4. Способ фиксации и сброса грузов для беспилотного летательного аппарата по п. 1, отличающийся тем, что используют сбрасывающую часть, которая образует выпуклую аэродинамическую поверхность вместе с крайним сбрасываемым грузом в носовой части беспилотного летательного аппарата.
5. Способ фиксации и сброса грузов для беспилотного летательного аппарата по п. 1, отличающийся тем, что за последним сбрасываемым грузом размещают внутренний элемент беспилотного летательного аппарата, который вместе с сбрасывающей частью образует выпуклую аэродинамическую поверхность.
6. Способ фиксации и сброса грузов для беспилотного летательного аппарата по п. 1, отличающийся тем, что для сброса каждого из грузов применяют пороховой двигатель с тыльной стороны груза.
| СИСТЕМА ТРАНСПОРТИРОВКИ И СБРОСА ГРУЗОВ ТРАНСПОРТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2513079C2 |
| СПОСОБ СБРОСА ПОЛЕЗНОЙ НАГРУЗКИ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2506205C1 |
| УСТРОЙСТВО ФИКСАЦИИ ИЛИ СБРОСА ОБЪЕМНЫХ ТЕЛ ДЛЯ СВЕРХЛЕГКИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2587318C2 |
| US 20120210852 A1, 23.08.2012 | |||
| WO 2017072524 A1, 04.05.2017. | |||

