Изобретение относится к области беспилотных летательных аппаратов (БПЛА) вертолетного и самолетного типов, а именно к конструкциям легких и/или сверхлегких БПЛА, оснащенных полезным грузом, освобождение от которого во время полета изменяет полетные параметры БПЛА по крену и тангажу (при сбросе груза). В частности, под полезным грузом может рассматриваться устройство запуска штатных выстрелов ручных переносных гранатометов с малых беспилотных летательных аппаратов.
В рамках настоящего изобретения под термином миниатюрный БПЛА или малый БПЛА (SUAV) или дрон ("SUAV Advanced Concept Technology Demonstration" U.S. Army Soldier Systems Center"Small Unmanned Aircraft Vehicles Advanced Concept Technology Demonstration (SUAV ACTD)". 25 февраля 2012. Архивировано 25 февраля 2012 г.) понимается беспилотный летательный аппарат, достаточно малый, чтобы быть переносным человеком. Самые маленькие БПЛА называются микро-воздушными транспортными средствами. Миниатюрные БПЛА варьируются от микро-воздушных транспортных средств (MAV), которые могут перевозиться пехотинцем, до переносных БПЛА, которые можно перевозить и запускать, как переносную систему противовоздушной обороны пехоты. Термин обычно применяется к тем, которые используются в военных целях. БПЛА получили различные определения среди национальных регулирующих органов, часто без учета точности размеров и расхождений в спецификациях измерения веса. Эти определения варьируются от менее 2 кг для Канады до менее 25 кг для Соединенных Штатов («Регламент FAA SUAS 2015 года»). Перспектива SESAR UE для правил управления воздушным движением 2020 года также предлагала менее 25 кг ("Определение СУАС, пересмотренное СЕСАР"), в то время как САА Великобритании заявила менее 20 кг.
Условием балансировки БПЛА в установившемся горизонтальном полете является равенство нулю коэффициента момента тангажа и момента крена. При этом это равенство устанавливается по отношению к центру тяжести БПЛА. Под понятием зоны центра тяжести понимается зона опорной поверхности БПЛА вокруг центра тяжести. Чем БПЛА легче, тем меньше по площади эта зона. Устойчивость ЛА в полете определяется управлением аппаратом с целью сохранения положения проекции центра тяжести в опорной зоне. Для малых БПЛА перегрузка или перераспределение весовых нагрузок приводят к выходу проекции центра тяжести из этой зоны. Такие проблемы ярко выражены и присущи и для БПЛА самолетного и для БПЛА вертолетного типа, обладающих малым собственным весом, сильной зависимостью устойчивости от места подвеса полезного груза.
В настоящее время приобрело широкое распространение использование БПЛА для доставки различных грузов как в гражданских целях (посылки), так и в военных целях (сброс боеприпасов, производство выстрелов во время полета). Для скоростных малых БПЛА, использующих самолетную или вертолетную аэродинамическую схему, вопрос балансировки БПЛА в момент частичного или порционного сброса груза или после полного сброса груза представляет существенную проблему. Кроме 5 того, сложно решается вопрос с навешиванием груза или грузового отсека.
В рамках настоящей заявки изобретение рассматривается на примере исполнения БПЛА вертолетного и самолетного типа. БПЛА вертолетного типа имеет один или несколько винтов и представляют собой классический вертолет. Подъемная сила у аппаратов этого типа также создается аэродинамически, но не за счет крыльев, а за счет вращающихся лопастей несущего винта (винтов). Крылья либо отсутствуют вовсе, либо играют вспомогательную роль. Очевидными преимуществами БПЛА вертолетного типа являются способность зависания в точке и высокая маневренность, поэтому их часто используют в качестве воздушных роботов. БПЛА самолетного типа известен также как БПЛА с жестким крылом. Подъемная сила у этих аппаратов создается аэродинамическим способом за счет потока воздуха, набегающего на неподвижное крыло.
Известен БПЛА ракетоподобного типа, несущее полезный груз и в котором сбрасываемые грузы размещают в носовой части фюзеляжа БПЛА с возможностью перемещения в сбрасывающую часть, грузы размещают в носовой части БПЛА последовательно друг за другом с возможностью поочередной фиксации каждого крайнего к сбрасывающей части груза, при этом за последним грузом размещают часть внутренних элементов БПЛА с возможностью их перемещения в носовую часть беспилотного летательного аппарата при сбрасывании каждого груза (RU 2719703, B64D 1/10, опубл. 22.04.2020).
Сброс грузов проводят в направлении полета БПЛА, при этом используют сбрасывающую часть, которая образует выпуклую аэродинамическую поверхность вместе с крайним сбрасываемым грузом в носовой части беспилотного летательного аппарата. А за последним сбрасываемым грузом размещают внутренний элемент беспилотного летательного аппарата, который вместе с сбрасывающей частью образует выпуклую аэродинамическую поверхность. Для сброса каждого из грузов применяют пороховой двигатель с тыльной стороны груза. Как указано в патенте, это обеспечивает сохранение балансировки БПЛА после сброса груза.
Это решение принято в качестве прототипа.
В известном изобретении сохранение балансировки БПЛА по тангажу (управление по крену не рассматривается) осуществляется за счет перемещения оставшихся после сброса грузов и частей внутренних элементов БЛА в носовую часть. При этом каждый крайний к сбрасывающей части груз поочередно фиксируют. Это обеспечивает сохранение аэродинамического сопротивления и характеристик БПЛА после выброса груза, а также балансировку БПЛА, когда центр давления сохраняет свою позицию за центром масс БПЛА. Особенностью такой конструкции является то, что грузовой отсек встроен в фюзеляж и является его составной частью.
Практика применения малых БПЛА, особенно в военной области, например, для доставки груза или сброса груза или выпуска зарядов, показывает, что такие аппараты, по сути, являются аппаратами одного полета в один конец (непродолжительное время полета (от 30 мин до 1 час), частая потеря связи для управления им и разрушения). То есть, это одноразовые БПЛА. Преимуществом малых БПЛА является их небольшой размер и вес, что превращает их в труднодоступную цель. Встраивать грузовой отсек в такие малые БПЛА невозможно, но возможно навешивание грузового отсека, как дополнительного оборудования, на корпус. Но есть проблема, которая заключается в том, что навешиваемое оборудование стабилизировано при взлете и полете, но эта стабилизация нарушается при сбросе груза и оказывает влияние на стабилизацию БПЛА в полете после сброса груза.
При анализе уровня техники не обнаружено аналогов, характеризующихся признаками, тождественными всем существенным признакам данного изобретения. А также не выявлено факта известности влияния признаков, включенных в формулу, на технический результат заявляемого технического решения. Следовательно, заявленное изобретение соответствует условиям патентоспособности «новизна» и «изобретательский уровень».
Настоящее изобретение направлено на достижение технического результата, заключающегося в повышении стабилизации уравновешенного по тангажу БПЛА, нагруженного выбрасываемым в полете грузом в направлении расположения объекта приема этого груза.
Указанный технический результат достигается тем, что в малом беспилотном летательном аппарате, содержащем корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для подлежащего порционной или штучной или разовой выгрузке полезного груза во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, указанное опорное приспособление для закрепления метательного устройства для полезного груза выполнено в виде закрепляемой сверху или снизу корпуса планки Пикатини или Вивера, закрепленной в двух точках вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения, в одной из которых планка связана в корпусом шарнирно, а в другой - через привод подъема и опускания конца планки в вертикальной плоскости, проходящей через продольную ось летательного аппарата или через линию вектора курсового движения, при этом планка оснащена быстроразъемными средствами крепления метательного устройства для полезного груза, а летательный аппарат оснащен приспособлением наведения для выброса полезного груза.
Для этого варианта исполнения быстроразъемные средства могут представлять собой хомуты, а метательное устройство для выброса полезного груза - ручной гранатомет.
Кроме того, приспособление наведения может быть выполнено в виде управляемой сервоприводом видеокамеры с сеткой прицеливания и связано со спусковым механизмом метательного устройства для выброса полезного груза, или выполнено в виде видеокамер, используемых для дистанционного управления летательным аппаратом, и связано со спусковым механизмом метательного устройства для выброса полезного груза.
Указанный технический результат достигается тем, что в малом беспилотном летательном аппарате, содержащем корпусн, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для подлежащего порционной или штучной или разовой выгрузке полезного груза во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, указанное опорное приспособление для закрепления метательного устройства для полезного груза выполнено в виде закрепляемой сверху или снизу корпуса гиростабилизированной платформы, несущей быстросъемные хомуты для закрепления корпуса метательного устройства, представляющего собой ручной гранатомет, спусковой механизм которого связан с приспособлением наведения для сброса этого груза.
Для этого варианта исполнения приспособление наведения может быть выполнено в виде управляемой сервоприводом видеокамеры с сеткой прицеливания или в виде штатных видеокамер, используемых для дистанционного управления летательным аппаратом.
Указанный технический результат достигается тем, что в малом беспилотном летательном аппарате, содержащем корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для выброса полезного груза, подлежащего порционной или штучной или разовой выгрузке во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, указанное опорное приспособление для закрепления метательного устройства для выброса полезного груза выполнено в виде закрепляемой сверху или снизу корпуса гиростабилизированной платформы, несущей быстросъемные хомуты для закрепления трубы метательного устройства, выполненного в виде ручного гранатомета, труба которого используется для размещения полезного груза в виде заряда, спусковой механизм которого связан с приспособлением наведения для сброса этого заряда, при этом указанная труба размещена по одну сторону вертикальной линии, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена дополнительной трубой, несущей груз, перемещаемый в сторону центра тяжести летательного аппарата при выбросе заряда или отделяемой вместе с грузом от трубы с ударно-спусковым механизмом после выброса полезного груза или балластный груз, отделяемый от трубы с ударно-спусковым механизмом после выброса полезного груза.
Указанный технический результат достигается тем, что в малом беспилотном летательном аппарате, содержащем корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для полезного груза, подлежащего порционной или штучной или разовой выгрузке во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, метательное устройство для полезного груза выполнено в виде закрепляемой сверху или снизу корпуса вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения трубы метательного устройства, выполненного в виде ручного гранатомета, труба которого используется для размещения полезного груза в виде заряда, спусковой механизм которого связан с приспособлением наведения для сброса этого заряда, при этом труба закреплена в двух точках, в одной из которых она связана в корпусом шарнирно, а в другой - через привод подъема и опускания конца трубы в вертикальной плоскости, проходящей через продольную ось летательного аппарата или через линию вектора курсового движения, летательный аппарат оснащен приспособлением наведения для сброса полезного груза, связанным со спусковым механизмом выброса заряда из метательного устройства.
При этом для этого варианта исполнения указанная труба может быть размещена по одну сторону вертикальной линии, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена дополнительной трубой, несущей груз, отделяемой вместе с грузом от трубы с ударно-спусковым механизмом после выброса полезного груза или балластный груз, отделяемый от трубы с ударно-спусковым механизмом после выброса полезного груза.
Указанный технический результат достигается тем, что в малом беспилотном летательном аппарате, содержащем корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для полезного груза, подлежащего порционной или штучной или разовой выгрузке во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, метательное устройство для полезного груза выполнено в виде неподвижно закрепленной сверху или снизу корпуса вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения трубы метательного устройства, выполненного в виде ручного гранатомета, труба которого используется для размещения полезного груза в виде заряда, и спусковой механизм которого связан с приспособлением наведения для сброса этого заряда, при этом указанная труба размещена по одну сторону вертикальной линии, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена балластным грузом, отделяемым от трубы с ударно-спусковым механизмом после выброса полезного груза.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Настоящее изобретение поясняется конкретными примерами исполнения БПЛА, которые, однако, не являются единственно возможными, но наглядно демонстрируют возможность достижения требуемого технического результата.
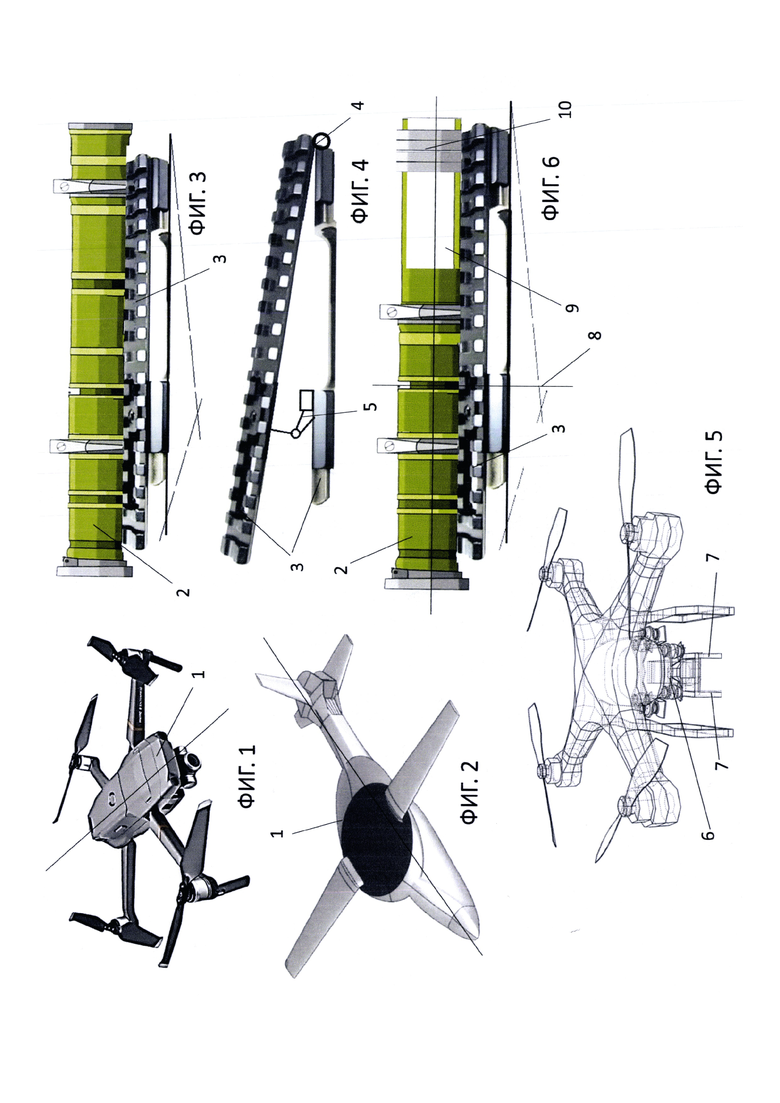
На фиг. 1 - типовой пример исполнения БПЛА вертолетного типа;
фиг. 2 - типовой пример исполнения БПЛА самолетного типа;
фиг. 3 - закрепление метательного устройства на платке Пикатини;
фиг. 4 - то же, что на фиг.3, положение регулировки планки Пикатини по углу в вертикальной плоскости;
фиг. 5 - БПЛА вертолетного типа с гиростабилизированным подвесом для закрепления метательного устройства;
фиг. 6 - метательное устройство с дополнительной трубой для регулировки баланса относительно центра тяжести БПЛА.
Согласно настоящему изобретению, рассматриваются новые конструкции грузоперевозящих малых БПЛА весом до 7 кг (вес навешиваемого оборудования), выполненных с функцией метательного выброса полезного груза. При этом изобретение рассматривается как применяемое для БПЛА вертолетного типа и для БПЛА самолетного типа. В частности, речь идет о БПЛА обеспечивающего прицельный выброс во время полета полезного груза и может использоваться как в области народного хозяйства (например, по сельскохозяйственному назначению или в области спасательной службы), так и в военной области. В качестве полезной нагрузки - груза, расходуемого во время полета, рассматриваются такие грузы, которые можно капсулировать или патронировать и оснащать элементом создания газовоздушного давления в метательном устройстве или формировать высокое давление в направляющем элементе метательного устройства, за счет чего этот груз выбрасывается в сторону направления направляющего элемента этого устройства.
В общем случае, малый беспилотный летательный аппарат содержит корпус 1 (или фюзеляж), выполненный в соответствии с проектно-конструкторской документацией, относящейся к вертолетному (фиг. 1) или самолетному (фиг. 2) типу БПЛА с расчетом подъемно-тяговой силы, учитывающей вес самого БПЛА и вес навешиваемого на корпус оборудования с полезным грузом.
Под навешиваемым оборудованием понимается метательное устройство, выполненное с функцией выброса из направляющего элемента капсулированного груза или заряда в виде груза (для подлежащего порционной или штучной или разовой выгрузке полезного груза во время полета). При этом либо капсула груза, либо заряд оснащаются элементом формирования газовоздушной смеси высокого давления (по типу патрона), либо эта смесь образуется непосредственно в направляющем элементе (пневматическое выстреливание). В частности, изобретение рассматривается на примере использования трубы 2 (как направляющего элемента) с ударно-спусковым механизмом (для инициации образования газовоздушной смеси высокого давления) от ручного гранатомета. Как вариант метательное устройство может быть выполнено в форм-факторе ручного трубчатого гранатомета.
Так же под навешиваемым оборудованием понимается механизм фиксации метательного устройства на корпусе БПЛА (как сверху корпуса, так и под днищем корпуса). При этом направляющий элемент метательного устройства располагается на корпусе БПЛА вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения. Расположение обусловлено первым фактором, зависящим от схемы размещения приводных узлов, создающих тяговое усилие, и вторым фактором - необходимостью прицеливания в точку выброса полезного груза во время полета, то есть по курсу полета.
Так же БПЛА оснащается механизмом регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза с целью:
- выравнивания моментов относительно центра тяжести при полете с грузом и при сбросе груза (конструктивно не представлен, так как обеспечивается алгоритмом полета БПЛА и ручным удаленным управлением оператора по данным видеонаблюдения);
- с целью прицеливания направляющего элемента метательного устройства в точку выброса груза при использовании приспособления наведения для выброса полезного груза.
На фиг. 3 представлен пример исполнения БПЛА, в котором метательное устройство закреплено на наружной поверхности корпуса БПЛА через опорное приспособление. Это приспособление выполнено в виде закрепляемой сверху или снизу корпуса БПЛА планки Пикатини 3 или Вивера (одинаковая по конструкции планка, отличающаяся размерами прорезей прикрепления). Планка 3 может закрепляться неподвижно на корпусе БПЛА или закрепляться в двух точках вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения, в одной из которых планка связана с корпусом шарнирно (поз. 4) (фиг. 4), а в другой - через привод 5 подъема и опускания конца планки 3 в вертикальной плоскости, проходящей через продольную ось летательного аппарата или через линию вектора курсового движения. При установке трубы ручного гранатомета в прорези планки труба метательного устройства закрепляется присутствующими на планке быстроразъемными средствами крепления (например, хомутами) (фиг. 3).
При этом, как вариант исполнения, метательное устройство может быть установлено на платформе, обеспечивающей повороты этого устройства влево-вправо (рыскание) относительно курса полета. Так, как пример, ответная часть планки Пикатини или Вивера, которая тем или иным образом закреплена на корпусе БПЛА, может быть связана с шаговым электродвигателем, позволяющим в пределах до 10-15° поворачивать эту ответную часть планки влево или вправо. Система управления этим шаговым двигателем может быть связана с камерой видеонаблюдения.
Приспособление наведения для всех примеров исполнения выполнено в виде управляемой сервоприводом видеокамеры с сеткой прицеливания и связано со спусковой частью ударно-спускового механизма метательного устройства для инициации процесса газообразования и выброса полезного груза. В качестве приспособления наведения можно использовать штатную видеокамеру/видеокамеры, которые используются для дистанционного управления БПЛА. Это приспособление в виде видеокамер так же связано со спусковой частью метательного устройства. По сути, видеокамера/видеокамеры показывают изображение картинки окружающей среды и имеют возможность по положению контрольной точки на картинке (например - это центр) фокусировать ориентацию метательного устройства по отношению к этой точке. При расположении контрольной точки в центре видеоизображения (по типу прицела) оператор дистанционного выдает управляющий сигнал на срабатывание ударного-спускового механизма. Кроме того, алгоритм работы видеокамер прицеливания может иметь набор контрольных изображений объектов, в сторону которых должен производиться выпуск заряда (как полезного груза). При появлении образа объекта, совпадающего с контрольным изображением объекта в памяти регистратора, который находится в контрольной точке, алгоритм запускает срабатывание ударно-спускового механизма.
Опорное приспособление для закрепления метательного устройства для полезного груза может быть выполнено в виде закрепляемой сверху или снизу корпуса гиростабилизированной платформы 6, несущей быстросъемные хомуты 7 для закрепления корпуса метательного устройства, представляющего собой трубу с ударно-спусковым механизмом ручного гранатомета, спусковая часть которого связана с приспособлением наведения для сброса этого груза (фиг. 5). На фиг. 5 труба метательного устройства не показана.
Как развитие этого примера исполнения, указанная труба 2 может быть размещена по одну сторону вертикальной линии 8, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена дополнительной трубой 9, несущей груз 10, перемещаемый в сторону центра тяжести летательного аппарата при выбросе заряда (фиг. 6). При заряженном метательном устройстве часть трубы, несущей заряд, уравновешивается весом дополнительной трубы 9 и весом груза 10 на ней. Изменением положения груза на участке от конца дополнительной трубы до вертикальной линии, проходящей через центр тяжести БПЛА, обеспечивают равенство крутящих моментов. В этом режиме груз, как правило, располагается ближе к открытому концу дополнительной трубы. После выброса заряда равенство моментов нарушается, что приводит к автоматическому смещению груза в сторону этой вертикальной линии. Это смещение обеспечивается отдельным приводом (например, шаговыми электродвигателями), связанным по управляющей линии с датчиками стабилизации гиростабилизированной платформы или отдельно установленными компенсационными датчиками тангажа или гироскопическим устройством (гировертикаль).
Вариант развития этого рассмотренного технического решения заключается в том, что указанная труба 2 может быть размещена по одну сторону вертикальной линии 8, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена дополнительной трубой 9, несущей груз 10 (фиг. 6). При заряженном метательном устройстве часть трубы, несущей заряд, уравновешивается весом дополнительной трубы 9 и весом груза 10 на ней. При таком расположении груз на участке дополнительной трубы до вертикальной линии, проходящей через центр тяжести БПЛА, обеспечивают равенство крутящих моментов. После выброса заряда для сохранения равенства моментов дополнительная труба с грузом отстреливается под действием давления от пороховых газов. Дополнительная труба может быть закреплена или прикреплена к трубе 2 быстроразъемным соединением, размыкание которого функционально связано с выбросом груза из основной трубы 2.
В принципе, применение дополнительной трубы с грузом - это частный случай. Вместо трубы может выступать ось с грузом или просто дополнительный балластный груз, который после метания полезного груза через трубу гранатомета отстреливается пороховой шашкой или выдавливается давлением пороховых газов или давление газов разблокировывает быстроразъемное соединение дополнительного груза с основной трубой.
Метательное устройство для может быть выполнено в виде закрепляемой сверху или снизу корпуса вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения трубы с ударно-спусковым механизмом метательного устройства, выполненного в виде ручного гранатомета. Труба используется для размещения полезного груза в виде заряда, и спусковая часть ее связана с приспособлением наведения для сброса этого заряда. Труба закреплена в двух точках, в одной из которых она связана в корпусом шарнирно, а в другой - через привод подъема и опускания конца трубы в вертикальной плоскости, проходящей через продольную ось летательного аппарата или через линию вектора курсового движения, при этом летательный аппарат оснащен приспособлением наведения для сброса полезного груза, связанным со спусковой частью ударно-спускового механизма для выброса заряда из метательного устройства.
Метательное устройство для полезного груза может быть выполнено в виде неподвижно закрепленной сверху или снизу корпуса вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения трубы с ударно-спусковым механизмом метательного устройства, выполненного в виде ручного гранатомета. Труба используется для размещения полезного груза в виде заряда, и спусковая часть ее связана с приспособлением наведения для сброса этого заряда. При этом указанная труба размещена по одну сторону вертикальной линии, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена дополнительной полой трубой, несущей груз, перемещаемый в сторону центра тяжести летательного аппарата при выбросе заряда.
Ниже рассматриваются примеры исполнения изобретений для военной области.
Рассматривается применение универсального направляющего устройства реечного типа - опорного приспособления типа планки Пикатини или Вивера, монтируемого на БПЛА. На БПЛА самолетного типа опорное приспособление монтируется неподвижно параллельно продольной оси БПЛА (наведение на цель осуществляется маневром БПЛА). На БПЛА вертикального взлета и посадки опорное приспособление монтируется на две точки, где заднее крепление имеет шарнир, а переднее крепление имеет сервопривод для наведения по вертикали, которое осуществляется отклонением переднего конца планки вверх-вниз. Наведение на цель по горизонтали осуществляется маневром БПЛА. Возможен вариант исполнения, где в качестве системы подвеса с возможностью наведения по горизонту и углу возвышения используется функциональный аналог системы подвеса видеооборудования с сервоприводами соответствующей грузоподъемности.
Устройства фиксации боеприпасов в транспортно-пусковом контейнере выполнено в виде быстроразъемных хомутов, закрепленных на планке. Хомуты должны иметь такую конфигурацию и расположение на планке, чтобы исключить возможность нерасчетной фиксации боеприпасов с нарушением центровки носителя.
Спусковой механизм (возможно совмещенный с одним из устройств фиксации боеприпаса. Спусковой механизм используется для приведения в действие штатного ударно-спускового механизма РПГ-18, 22/26.
Система обеспечения прицеливания перед выстрелом. Прицеливание перед выстрелом БПЛА самолетного типа может осуществляться с использованием штатных камер, используемых для управления дроном. Для обеспечения прицеливания на БПЛА вертикального взлета и посадки потребуется монтаж камеры с сеткой прицеливания на универсальное направляющее устройство соосно. Также система может быть дооборудована системами ночного видения для возможности применения в темное время суток и в условиях ограниченной видимости.
В другой реализации труба метательного устройства монтируется неподвижно параллельно продольной оси БПЛА (наведение на цель осуществляется маневром БПЛА). На БПЛА вертикального взлета и посадки универсальное направляющее устройство может монтироваться:
- на функциональный аналог гиростабилизированной поворотной платформы для подвеса видеооборудования с сервоприводами необходимой мощности
- на две точки, где заднее крепление имеет шарнир, а переднее крепление имеет сервопривод для наведения по вертикали, которое осуществляется отклонением переднего конца направляющего устройства вверх-вниз, а наведение на цель по горизонтали осуществляется маневром аппарата
- на две точки неподвижно, где наведение обеспечивается маневром летательного аппарата.
Используется ударно-спусковой механизм с устройством фиксации боеприпаса в направляющем устройстве (для предотвращения потери или нештатного смещения боеприпаса в направляющем устройстве во время полета). В качестве полетного балансира - металлическая / металл-полимерная / полимерная / картонная конструкция (сбрасываемая в процессе выстрела), вставляемая при подготовке выстрела в заднюю часть пускового устройства. Балансир должен иметь стопорные механизмы и ограничители, не позволяющие установить устройство неправильным образом в пусковой трубе и предотвращающие его потерю в полете. Балансир может быть выполнен в виде трубы, имеющей меньший внутренний диаметр, чем внутренний диаметр пусковой трубы, либо в виде реечной или иной конструкции. Пусковой полетный балансир оборудован передвижным балансировочным грузом (возможен вариант исполнения в виде металлического кольца со стопором, которое должно быть зафиксировано в конкретных положениях на трубе), обеспечивающим балансировку БПЛА во время полета с пусковым устройством, заряженным различными по габаритам и массе боеприпасами.
Электродвигатели и привода для работы системы наведения и УСМ.
Система электроснабжения для обеспечения работы прицельных устройств и системы наведения.
Система обеспечения прицеливания перед выстрелом.
Прицеливание перед выстрелом БПЛА самолетного типа может осуществляться с использованием штатных камер, используемых для управления дроном.
Для обеспечения прицеливания на БПЛА вертикального взлета и посадки потребуется монтаж камеры с сеткой прицеливания на универсальное направляющее устройство соосно.
Также система может быть дооборудована системами ночного видения для возможности применения в темное время суток и в условиях ограниченной видимости.
Настоящее изобретение промышленно применимо. БПЛА заявленной конструкции позволяет выбрасывать/выстреливать груз в направлении точки его доставки по линии прицеливания и на расстоянии от точки доставки, что становится особенно важным, если БПЛА не имеет возможности зависания над точкой выгрузки груза. Например, речь может идти о доставке полезного груза службами спасения. В военной области - это возможность выстреливания заряда в точку поражения на расстоянии от этой точки, то есть, находясь в зоне безопасности. Особенностью заявленных БПЛА является то, что имеется возможность прицеливания за счет маневрирования БПЛА по тангажу, при жестком закреплении направляющего элемента (трубы) на корпусе БПЛА или за счет изменения угла наклона направляющего элемента (трубы) по отношению к продольной линии летательного аппарата. Балансировка БПЛА, как с учетом веса полезного груза, так после его выброса обеспечивается компоновочными средствами. При жестком прикреплении трубы от ручного гранатомета уравновешивание осуществляется за счет баланса левой и правой частей трубы относительно центра тяжести БПЛА при расположении полезного груза в зоне этого центра тяжести. После выброса груза баланс сохраняется за счет уравновешивания моментов от левой и правой частей трубы. По крену БПЛА уравновешено за счет того, что труба (с зарядом-полезным грузом или без него) всегда находится на продольной линии БПЛА. При выполнении опорного приспособления для трубы в виде изменяющего угол наклона трубы устройства баланс моментов реализуется так же, как в рассмотренном ранее примере. Но изменение утла позволяет расширить границы зоны наведения при не изменении курса полета летательного аппарата и так же является компенсатором разницы между моментами левой и правой частей трубы после вылета заряда в точку доставки. Применение гиростабилизированной платформы обеспечивает стабилизацию положения трубы от гранатомета в пространстве, что позволяет точно наводить на цель в точке приземления полезного груза. Так как такая платформа крепится в зоне центра тяжести (на вертикальной линии, проходящей через центр тяжести), то положение трубы определяется параметрами стабилизации самой платформы. При условно сбалансированном закреплении трубы в хомутах этой платформы существенным является размещение зоны расположения заряда в зоне центра тяжести БПЛА.
Изобретение относится к области беспилотных летательных аппаратов (БПЛА). Малый БПЛА содержит корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для полезного груза, подлежащего порционной, или штучной, или разовой выгрузке во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза. Опорное приспособление для закрепления метательного устройства выполнено в виде закрепляемой сверху или снизу корпуса планки Пикатини или Вивера, закрепленной в двух точках вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения, в одной из которых планка связана в корпусом шарнирно, а в другой - через привод подъема и опускания конца планки в вертикальной плоскости, проходящей через продольную ось летательного аппарата или через линию вектора курсового движения. Планка оснащена быстроразъемными средствами крепления метательного устройства, а летательный аппарат оснащен приспособлением наведения для сброса полезного груза. Обеспечивается повышение стабилизации уравновешенного по тангажу БПЛА, нагруженного выбрасываемым в полете грузом. 5 н. и 7 з.п. ф-лы, 6 ил.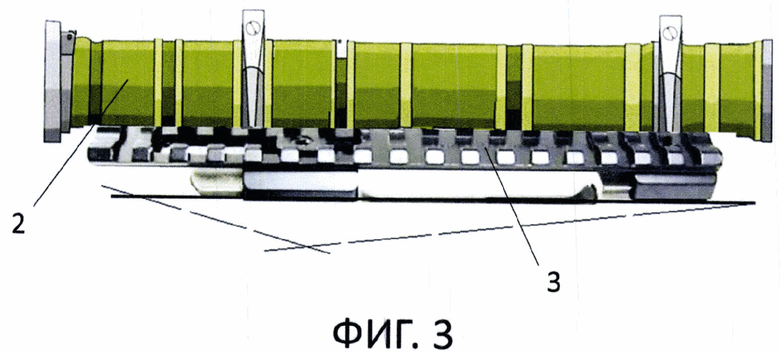
1. Малый беспилотный летательный аппарат, содержащий корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для подлежащего порционной, или штучной, или разовой выгрузке полезного груза во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, отличающийся тем, что указанное опорное приспособление для закрепления метательного устройства для полезного груза выполнено в виде закрепляемой сверху или снизу корпуса планки Пикатини или Вивера, закрепленной в двух точках вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения, в одной из которых планка связана в корпусом шарнирно, а в другой - через привод подъема и опускания конца планки в вертикальной плоскости, проходящей через продольную ось летательного аппарата или через линию вектора курсового движения, при этом планка оснащена быстроразъемными средствами крепления метательного устройства для полезного груза, а летательный аппарат оснащен приспособлением наведения для выброса полезного груза.
2. Аппарат по п. 1, отличающийся тем, что быстроразъемные средства представляют собой хомуты.
3. Аппарат по п. 1, отличающийся тем, что метательное устройство для выброса полезного груза представляет собой трубу с ударно-спусковым механизмом ручного гранатомета.
4. Аппарат по п. 1, отличающийся тем, что приспособление наведения выполнено в виде управляемой сервоприводом видеокамеры с сеткой прицеливания и связано со спусковой частью ударно-спускового механизма метательного устройства для выброса полезного груза.
5. Аппарат по п. 1, отличающийся тем, что приспособление наведения выполнено в виде видеокамер, используемых для дистанционного управления летательным аппаратом, и связано со спусковой частью ударно-спускового механизма метательного устройства для выброса полезного груза.
6. Малый беспилотный летательный аппарат, содержащий корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для подлежащего порционной, или штучной, или разовой выгрузке полезного груза во время полета, а также механизм регулировки тангажа и рыскания в соответствии с алгоритмом высвобождения полезного груза, отличающийся тем, что указанное опорное приспособление для закрепления метательного устройства для полезного груза выполнено в виде закрепляемой сверху или снизу корпуса гиростабилизированной платформы, несущей быстросъемные хомуты для закрепления корпуса метательного устройства, представляющего собой трубу с ударно-спусковым механизмом ручного гранатомета, спусковая часть которого связана с приспособлением наведения для сброса этого груза.
7. Аппарат по п. 6, отличающийся тем, что приспособление наведения выполнено в виде управляемой сервоприводом видеокамеры с сеткой прицеливания.
8. Аппарат по п. 6, отличающийся тем, что приспособление наведения выполнено в виде видеокамеры, используемой для дистанционного управления летательным аппаратом.
9. Малый беспилотный летательный аппарат, содержащий корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для выброса полезного груза, подлежащего порционной, или штучной, или разовой выгрузке во время полета, а также механизм регулировки тангажа и рыскания в соответствии с алгоритмом высвобождения полезного груза, отличающийся тем, что указанное опорное приспособление для закрепления метательного устройства для выброса полезного груза выполнено в виде закрепляемой сверху или снизу корпуса гиростабилизированной платформы, несущей быстросъемные хомуты для закрепления трубы с ударно-спусковым механизмом метательного устройства в виде ручного гранатомета, труба которого используется для размещения полезного груза в виде заряда, спусковая часть которого связана с приспособлением наведения для сброса этого заряда, при этом указанная труба размещена по одну сторону вертикальной линии, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена дополнительной трубой, несущей груз, перемещаемый в сторону центра тяжести летательного аппарата при выбросе заряда, или дополнительной трубой, отделяемой вместе с грузом от трубы с ударно-спусковым механизмом после выброса полезного груза, или балластным грузом, отделяемым от трубы с ударно-спусковым механизмом после выброса полезного груза.
10. Малый беспилотный летательный аппарат, содержащий корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для полезного груза, подлежащего порционной, или штучной, или разовой выгрузке во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, отличающийся тем, что метательное устройство для полезного груза выполнено в виде закрепляемой сверху или снизу корпуса вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения трубы с ударно-спусковым механизмом метательного устройства, выполненного в виде ручного гранатомета, труба которого используется для размещения полезного груза в виде заряда и спусковая часть которого связана с приспособлением наведения для сброса этого заряда, при этом труба закреплена в двух точках, в одной из которых она связана в корпусом шарнирно, а в другой - через привод подъема и опускания конца трубы в вертикальной плоскости, проходящей через продольную ось летательного аппарата или через линию вектора курсового движения, летательный аппарат оснащен приспособлением наведения для сброса полезного груза, связанным со спусковой частью ударно-спускового механизма для выброса заряда из метательного устройства.
11. Аппарат по п. 1, отличающийся тем, что указанная труба размещена по одну сторону вертикальной линии, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена дополнительной трубой, несущей груз, отделяемой вместе с грузом от трубы с ударно-спусковым механизмом после выброса полезного груза, или балластный груз, отделяемый от трубы с ударно-спусковым механизмом после выброса полезного груза.
12. Малый беспилотный летательный аппарат, содержащий корпус, несущий на наружной поверхности опорное приспособление для закрепления метательного устройства для полезного груза, подлежащего порционной, или штучной, или разовой выгрузке во время полета, а также механизм регулировки тангажа в соответствии с алгоритмом высвобождения полезного груза, отличающийся тем, что метательное устройство для полезного груза выполнено в виде неподвижно закрепленной сверху или снизу корпуса вдоль продольной оси летательного аппарата или вдоль вектора его курсового движения трубы с ударно-спусковым механизмом метательного устройства, выполненного в виде ручного гранатомета, труба которого используется для размещения полезного груза в виде заряда и спусковая часть которого связана с приспособлением наведения для сброса этого заряда, при этом указанная труба размещена по одну сторону вертикальной линии, проходящей через центр тяжести летательного аппарата, и на другой стороне от этой линии оснащена балластным грузом, отделяемым от трубы с ударно-спусковым механизмом после выброса полезного груза.
| СПОСОБ ФИКСАЦИИ И СБРОСА ГРУЗОВ ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2719703C1 |
| CN 107588679 A, 16.01.2018 | |||
| RU 2020137203 A, 11.05.2022 | |||
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| KR 1020160077703 A, 04.07.2016 | |||
| CN 107757919 A, 06.03.2018. | |||

