Оптические устройства для измерения расстояния как таковые известны уже давно и в большом количестве находятся в обращении. Эти устройства посылают модулированное оптическое излучение, поток которого направлен на поверхность нужного целевого объекта, расстояние которого от устройства необходимо определить. Возвращающаяся от целевого объекта, часть отраженного или рассеянного целевым объектом излучения, обнаруживается устройством и используется для определения искомого расстояния.
Диапазон измерений подобных устройств обычно находится в пределах от нескольких метров до нескольких километров.
Известны лазерные дальномеры времяпролетного типа, в которых расстояние до объекта определяется по времени запаздывания отраженного от объекта импульса оптического сигнала [1]. Недостатком таких дальномеров является то, что разрешающая способность ограничивается длительностью импульса, тем самым влияя на точность измерения расстояния. Для импульсов, длительность которых лежит в наносекундном диапазоне, погрешность измерения расстояния составляет десятки сантиметров.
Известны лазерные дальномеры, измеряющие расстояние до объекта по изменению фазы непрерывного радиочастотного сигнала, которым модулируется по интенсивности поток оптического излучения при прохождении им двойного измеряемого расстояния [2, 3]. Они характеризуются сложностью схемной реализации, которая увеличивается при повышении требований к точности измерений.
Известны также лазерные дальномеры, в которых расстояние до объекта определяется по изменению частоты отраженного частотно-модулированного сигнала [4, 5]. Основной недостаток таких дальномеров заключается в том, что интервал частоты модуляции ограничен, что в свою очередь ограничивает дальность измерений до объекта.
Наиболее близким к заявляемому техническому решению является оптическое устройство для определения расстояния до объекта [7]. Оптическое устройство включает в себя:
• источник излучения модулированного бинарного оптического сигнала, вход которого соединен с выходом
• генератора создания зондирующей последовательности, первый вход которого соединен с первым выходом
• генератора тактового сигнала,
• оптическое приемное устройство, работающее в нелинейном режиме, выход которого соединен с входом
• мультиплексора, выход которого соединен с первым входом
• первого блока накопления сигнала, выход которого соединен с первым входом
• модуля вычисления взаимно-корреляционной функции опорного и принятого
сигналов, выход которого соединен с первым входом
• второго блока накопления сигнала, выход которого соединен с входом
• демультиплексора, выход которого соединен с входом
• модуля порогового обнаружения сигнала, выход которого соединен с входом
• модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, включающего
• модуль вычисления временной задержки отраженного сигнала,
• блока подсчета циклов зондирования, выход которого соединен с входом
• блока выборки и обработки зондирующих сигналов
Недостатком указанного дальномера, принятого за прототип, является то, что в вычислительном модуле взаимно-корреляционной функции происходит обработка не идентичных сигналов, так как принятый сигнал является оптическим сигналом, который приобретает дополнительное фазовое дрожание из-за того, что он получается в результате преобразования опорного электрического сигнала в лазерном источнике, в оптических и оптико-электронных элементах устройства, а опорный сигнал сразу подводится к вычислительному модулю взаимно-корреляционной функции в виде электрического сигнала. В результате чего возникает дополнительная погрешность измерения максимума взаимно-корреляционной функции.
Техническим результатом заявляемого устройства является сохранение динамического диапазона лазерного дальномера с повышением точности измерений.
Указанный технический результат достигается тем, что, в отличие от прототипа, опорный сигнал образуется путем разделения лазерного излучения светоделительным кубом, и при регистрации корреляционного максимума задающий генератор перестраивается на следующую более длинную зондирующую последовательность. Детектирование рабочего и опорного сигналов происходит идентичными приемниками излучения, после чего электрические сигналы подаются в корреляционный блок обработки данных.
Источник излучения лазерного дальномера генерирует зондирующее излучение в виде псевдослучайной последовательности лазерных импульсов. Данный метод измерения расстояния объединяет принцип работы фазового и импульсного дальномера. Псевдослучайную последовательность импульсов можно представить в виде двоичного кода. Для генерации псевдослучайной последовательности можно использовать сдвиговый регистр с линейной обратной связью, в котором период последовательности определяется количеством бит в регистре (часто используемые: 211 - 1, 215 - 1, 223 - 1, 231 - 1). Главное свойство псевдослучайной последовательности заключается в том, что ее автокорреляционная функция, измеренная за конечный интервал времени, представляет собой узкий треугольник. Высоту этого треугольника можно вычислить по следующей формуле:


где τ0 - длительность импульсов;
σ2 - дисперсия последовательности;
N - длина последовательности.
Используя непрерывные, следующие друг за другом, лазерные псевдослучайные последовательности, можно избавиться от квазислучайного шума, который возникает вне треугольной автокорреляционной функции. К полезным качествам данной системы следует отнести простоту передачи информации о ней, например, при удаленности выхода системы от входа. Ведь для точного ее восстановления нет необходимости передавать саму последовательность: нужно сообщить длительность единицы, длину регистра и номера отводов обратной связи.
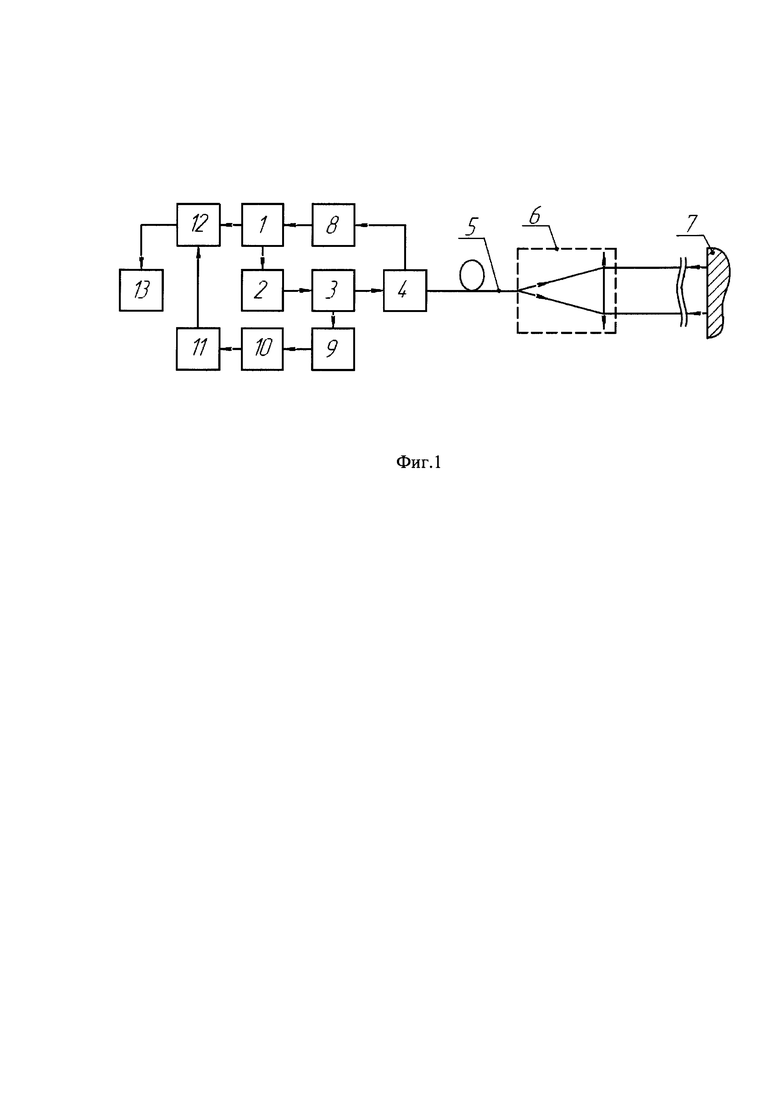
Изобретение иллюстрируется чертежом, на котором схематически изображен заявляемый лазерный дальномер.
Согласно фиг. 1 лазерный дальномер содержит: задающий генератор с устройством синхронизации 1; лазерный источник излучения 2; светоделительный куб 3; оптический разветвитель 4; оптоволокно 5; волоконный коллиматор 6; два приемника излучения 8, 10; оптическую и цифровую линии задержки 9, 11; корреляционное устройство 12 реального времени; монитор 13, для вывода информации.
Лазерный дальномер работает следующим образом. Задающий генератор 1 формирует непрерывную серию псевдослучайных последовательностей в виде электрических импульсов, далее передает сигнал источнику лазерного излучения 2, который генерирует соответствующую псевдослучайную последовательность оптических импульсов. Светоделительный куб 3, на который поступает излучение лазерного источника, делит это излучение на рабочий и опорный сигналы. Рабочий сигнал распространяется по передающему каналу, состоящему из оптического разветвителя 4, оптоволокна 5 и волоконного коллиматора 6. Выходящее излучение достигает исследуемый объект 7, отражается и возвращается в приемный канал, затрачивая время, определяемое значением скорости света и измеряемым расстоянием. Рабочий и опорный сигналы регистрируется приемниками излучения 8 и 10 соответственно. С помощью оптической 9 и цифровой 11 линий задержки, входящих в состав устройства, опорный сигнал смещается во времени таким образом, чтобы получить максимальное значение корреляционной функции двух сигналов, посчитанное корреляционным устройством реального времени 12. Результат вычислений отображается на мониторе 13. Данное временное смещение и будет временем пролета излучения до объекта и обратно. Измеряемое значение длины получается перемножением этого времени и скорости света.
Для оценки точности измерений была сгенерирована модель данного лазерного дальномера с учетом наиболее важных флуктуирующих параметров и посчитано среднеквадратическое отклонение корреляционной функции. Если при длительности импульса в 100 пс время отклика системы не превышает 10 пс, интервал фазового шума не превышает в 10 пс и отношения сигнал/шум равен 1, то относительная погрешность измерения временного смещения при дальности в 3 км составляет 3 пс, что соответствует ошибке примерно в 0,9 мм.
Источники информации:
1. Патент РФ №2140622, кл. G01C 3/08, 1999 г.
2. Патент США №6483595, НКИ 356/607, 2002 г.
3. Патент США №7023531, НКИ 356/5.01, 2006 г.
4. Патент США №6147638, НКИ 342/109, 2000 г.
5. Патент США №7139446, НКИ 385/12, 2006 г.
6. Патент США №7023531, кл. G01C 3/08, 2006 г.
7. Патент РФ №2653558, кл. G01S 17/08, 2017 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И ПОВЕРКИ МЕТЕОРОЛОГИЧЕСКОГО ЛИДАРНОГО ОБОРУДОВАНИЯ ТИПА ОБЛАКОМЕР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2636797C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2793613C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2785768C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2007 |
|
RU2339909C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЯ С ОПТОВОЛОКОННЫМ ВЫВОДОМ НА ЦЕЛЬ | 2023 |
|
RU2816822C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2017 |
|
RU2653558C9 |
| УСТРОЙСТВО ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ ДВИЖУЩЕЙСЯ ПОВЕРХНОСТИ НА ОСНОВЕ ИНТЕРФЕРОМЕТРА С ВОЛОКОННЫМ ВВОДОМ ИЗЛУЧЕНИЯ | 2017 |
|
RU2657135C1 |
| ДИСТАНЦИОННЫЙ ОПТИЧЕСКИЙ АБСОРБЦИОННЫЙ ЛАЗЕРНЫЙ ГАЗОАНАЛИЗАТОР | 2019 |
|
RU2714527C1 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО НАБЛЮДЕНИЯ | 1997 |
|
RU2145433C1 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ, СНАБЖЕННОЙ ОПТОВОЛОКОННЫМ КАБЕЛЕМ | 2011 |
|
RU2478247C1 |
Изобретение относится к измерительной технике, для измерения расстояния до различных предметов. В лазерный дальномер входит задающий генератор с устройством синхронизации, который формирует непрерывную серию псевдослучайных последовательностей в виде электрических импульсов, поступающих на лазерный источник излучения, после которого светоделительный куб формирует опорный и рабочий оптические сигналы, где рабочий сигнал распространяется по передающему каналу через оптический разветвитель, оптоволокно и волоконно-оптический коллиматор, достигает исследуемого объекта и возвращается обратно через оптический разветвитель в приемный канал, состоящий из одного приемника излучения, в то время как опорный сигнал проходит через оптическую линию задержки, второй приемник излучения, цифровую линию задержки, поступает вместе с сигналом приемного канала на блок корреляционной обработки данных, после которого вычисляется текущее расстояние до исследуемого объекта. Технический результат: сохранение динамического диапазона лазерного дальномера с повышением точности измерений. 2 з.п. ф-лы, 1 ил.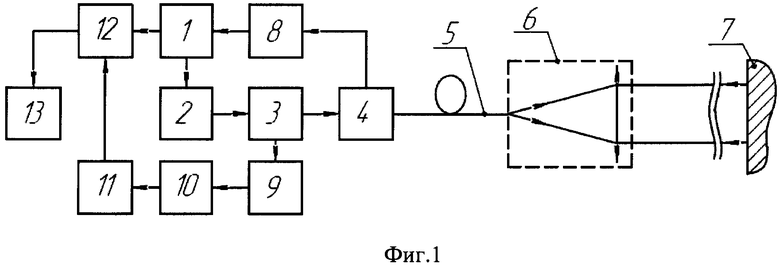
1. Лазерный дальномер, включает в себя задающий генератор с устройством синхронизации, соединенный с входом источника лазерного излучения, передающий и приемный каналы, блок корреляционной обработки данных, соединенный с монитором, отличающийся тем, что светоделительный куб формирует поступающие на объект исследования рабочий и опорный оптические сигналы, рабочий сигнал проходит по передающему каналу, выполненному в виде расположенных последовательно и оптически связанных оптического разветвителя, оптоволокна, волоконно-оптического коллиматора, а опорный сигнал, через оптическую линию задержки связан с первым приемником излучения, далее через цифровую линию задержки сигнала соединен с блоком корреляционной обработки данных, при этом рабочий сигнал после отражения от объекта исследования возвращается через оптический разветвитель в приемный канал, включающий в себя второй идентичный приемник излучения, соединенный с устройством синхронизации и с блоком корреляционной обработки данных, с помощью которого определяется максимум взаимно-корреляционной функции, результат выводится на экран.
2. Лазерный дальномер по п. 1, отличающийся тем, что с целью минимизации ошибки определения расстояния до объекта в ходе работы используется генератор с перестраиваемым периодом зондирующей последовательности (на 211 - 1,215 - 1,223 - 1,231 - 1).
3. Лазерный дальномер по п. 1, отличающийся тем, что с целью разделения сигнала, уменьшения габаритов устройства и снижения влияния фоновых засветок оптическая система для передачи излучения внутри устройства состоит из отрезков оптических волокон, снабженных входными и выходными коллиматорами.
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОРОТКИХ РАССТОЯНИЙ | 2006 |
|
RU2451905C2 |
| Способ определения расстояний | 1990 |
|
SU1783301A1 |
| ЛАЗЕРНЫЙ ИМПУЛЬСНЫЙ ДАЛЬНОМЕР | 2004 |
|
RU2288449C2 |
| US 20030048430 A1, 13.03.2003 | |||
| CN 102411141 A, 11.04.2012. | |||

