Область техники, к которой относится изобретение
Данное изобретение относится к области измерения расстояний до объекта с помощью электромагнитных волн, а более конкретно к оптическим устройствам для определения расстояний до объекта, включающим в себя источник излучения на объект модулированного бинарного оптического сигнала, генератор создания зондирующей последовательности, генератор тактового сигнала, оптическое приемное устройство, работающее в нелинейном режиме, мультиплексор, первый блок накопления сигнала, модуль вычисления взаимно-корреляционной функции опорного и принятого сигналов, второй блока накопления сигнала, демультиплексор, модуль порогового обнаружения сигнала, модуль вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, и может быть использовано, например, в навигации, в том числе беспилотных летательных аппаратов, а также в лазерной локации.
В данном описании используются следующие термины:
ЛИДАР (транслитерация LIDAR англ. Light Identification Detection and Ranging — световое обнаружение и определение дальности) — технология получения и обработки информации об удаленных объектах с помощью активных оптических систем, использующих явления отражения света и его рассеяния в прозрачных и полупрозрачных средах. Лидар, как прибор представляет собой, как минимум, активный дальномер оптического диапазона. Обычно в России подобные устройства называются лазерными дальномерами и лазерными локаторами.
ПШП, Псевдослучайные (псевдошумовые) последовательности - это полностью детерминированные цифровые последовательности, которые внешнему наблюдателю они кажутся случайными.
Мультиплексирование сигналов – уплотнение канала, т.е. передача нескольких потоков сигналовданных по одному каналу.
Демультиплексирование сигналов – обратная операция.
ВКФ - взаимнокорреляционная функция . Пример ВКФ:
Это математическая операция, мера подобия 2-х сигналов (опорного y(t) и принимаемого x(t)), точка максимума корреляционной функции соответствует точке минимального квадратичного отклонения между сигналами x и y.
Дополнительные последовательности. Известны дополнительные последовательности, (См. Варакин Л.Е. «Системы связи с шумоподобными сигналами». - М.: Радио и связь, 1985).
Последовательности {аn} и {ãn} называются дополнительными, если
Примером таких последовательностей являются D-коды.
Квантовая эффективность - вероятность генерации попадающим на приемное устройство фотоном свободного носителя, который достигнет области высокого поля, достаточного для ударной ионизации.
Оптическое излучение – в настоящем патенте под оптическим изучением понимаются электромагнитные волны, длины которых заключены в диапазоне с условными границами от 3000 µm до 0.25 µm.
ЭПР (эффективная поверхность рассеяния) - является количественной мерой свойства объекта рассеивать оптическое излучение по направлению к приемному сенсору.
ЛЧМ - линейная частотная модуляция, вид частотной модуляции при которой частота несущего сигнала изменяется линейно.
Уровень техники
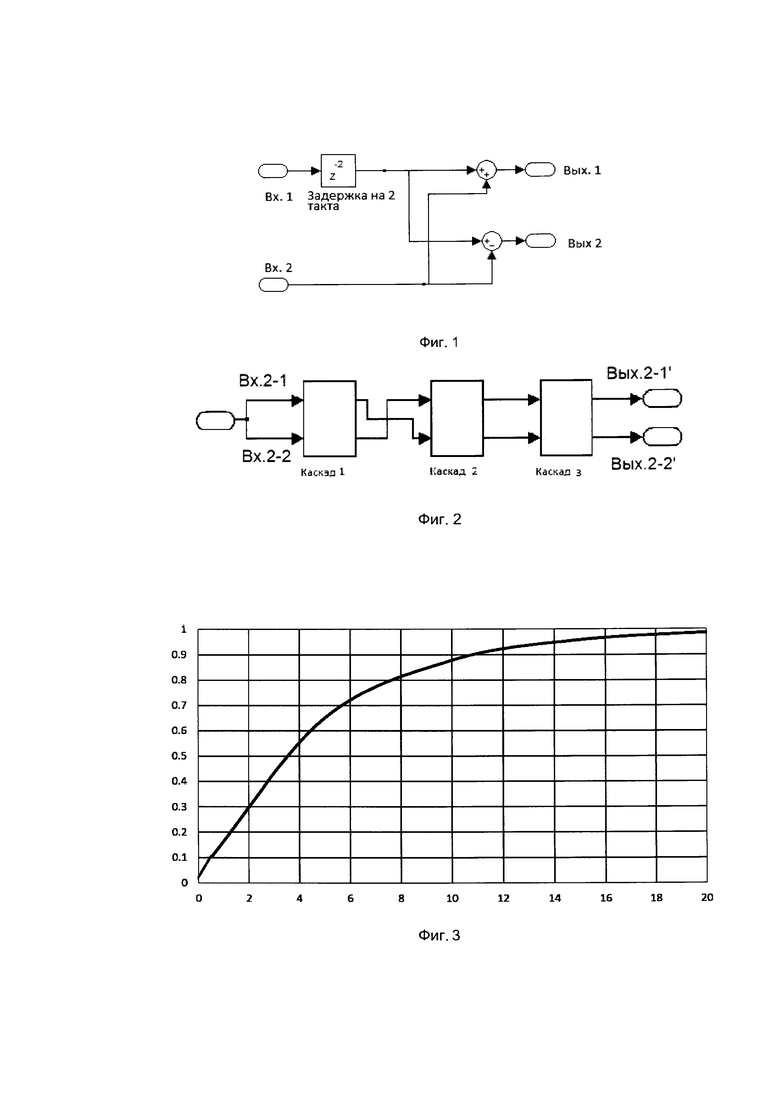
В патенте РФ RU 2605628 «Способ и оптическое устройство для определения расстояний до объекта» приведено описание способа формирования D-кодов и их модификаций, состоящее в использовании каскадного вычислителя, состоящего из последовательно соединенных каскадов каждый из которых содержит линию задержки и два сумматора. Схема такого каскада приведена на фиг. 1.
Последовательно соединяя такие каскады, как показано на фиг. 2 можно генерировать дополнительные последовательности, для чего на вход 2-1 и вход 2-2 первого каскада одновременно подается единичной импульс, а с выходов 2-1’ и 2-2’ последнего каскада считываются дополнительные последовательности.
Каскадный вычислитель используется для согласованной фильтрации сигналов, модулированных дополнительными последовательностями полученными с выходов 2-1’ и 2-2’ последнего каскада и считанными в обратном порядке, назовем их соответственно, дополнительные последовательности «один» и «два». Эти последовательности так же являются дополнительными. Для согласованной фильтрации фильтруемый сигнал одновременно подается на вход 2-1 и вход 2-2 первого каскада. По выходу 2-1’ последнего каскада каскадный вычислитель является согласованным фильтром для сигнала, модулированного последовательностью «один», а по выходу 2-2’ соответственно последовательностью «два». Соединения каскадов могут быть, как выход 2-1’ к входу 2-1, выход 2-2’ к входу 2-2, так и в перекрестно выход 2-1’ к входу 2-2 и наоборот.
Величина тактов задержки для линии задержки в каждом каскаде определяется, как
2(F((i) -1), где i номер каскада, F(i) - произвольная функция перестановок.
Например, если F(1) = 3, F(2) = 2, F(3) = 1, то в первом каскаде будет задержка на 4 такта, во втором на 2 и третьем на 1 такт.
Длина дополнительных последовательностей равна 2N, где N - число каскадов в схеме.
Например, схема, приведенная на фиг. 2, генерирует два дополнительных кода длины 23=8.
Если необходимо параллельно производить вычисления с М каналов, то число тактов задержки во всех цифровых линиях задержки, используемых в каскадном вычислителе в каждом из каскадов, должно быть увеличено в М раз. Сигналы в каскадный вычислитель при этом подаются через мультиплексор. Это позволяет упростить обработку и сократить объем используемой для вычислений памяти.
В патенте US 5499134, опубликован в марте 1996 г., описано лазерное устройство, генерирующее короткие лазерные импульсы (фемтосекундные). Устройство включает в себя генератор, который генерирует и выводит пучок коротких затравочных импульсов, модуль растяжения, который растягивает длительность затравочных импульсов путем их чирпирования (растягивания широкополосного импульса в дисперсионной оптической среде/системе), и усилитель, который принимает растянутые затравочные импульсы, усиливает амплитуду выбранных растянутых затравочных импульсов для создания усиленных чирпированных импульсов и выводит лазерный пучок усиленных растянутых импульсов в модуль сжатия, который сжимает их длительность (при прохождении импульса через среду с обратной дисперсией), выводит лазерный пучок усиленных коротких импульсов. Такой метод получил название – «Метод усиления чирпированных импульсов» (Сhirped pulse amplification).
На данный момент модулируемые лазерные устройства, генерирующие последовательности фемтосекундных импульсов с частотой следования фемтосекундных импульсов до 200 MHz при длительности менее 20 fs (фемтосекунд) являются доступными устройствами на рынке волоконно-оптических коммуникационных систем.
Пример 1. Используется лазер YLMO компании MenloSystems с длительностью импульса менее 150 fs и частотой повторения 100 MHz. За время 300 µs с использованием такого лазера можно излучить ПШП состоящую из 15000 оптических импульсов. Мощность излучения каждого единичного импульса составляет не менее 26 kW. Обработка принятой ПШП позволяет получить эффект (достичь того же соотношения сигнал/шум на выходе приемника), который бы мы получили, используя лазер генерирующий мощность в 150 fs импульсе порядка 3.2 MW. Это позволят увеличить диапазон разрешаемых дальностей (по сравнению с моноимпульсным вариантом зондирования) в 3.3 раза при ненаправленном оптическом излучении от источника, если же вся излучаемая энергия будет фокусироваться на зондируемом объекте увеличение диапазона составит 11 раз.
Для целей зондирования, рефлектометрии, волоконно-оптической коммуникации, сжатие чирпированных импульсов может происходить и в приемном тракте. Близкий по сути метод широко используется в радиолокации и получил название согласованной ЛЧМ фильтрации сигнала. Отличие состоит в том, что оптический чирпированный сигнал не является когерентным.
Известны сенсоры регистрации оптического излучения, применяемые для регистрации единичных фотонов, работающих в нелинейном режиме. Примером такого сенсора может служить сенсор, описанный в патенте RU 2346357, опубликован в 2009 г., на основе тонкопленочных сверхпроводниковых структур.
Подобного рода сенсоры характеризуются:
1) квантовой эффективностью до 80- 90%,
2) рабочими диапазонами длин волн регистрируемого излучения от 0.25 до 3 µm,
3) временным разрешение до 25 ps.
На основе подобных приемников, создаются интегральные системы регистрации, имеющие десятки каналов (пикселов).
В патенте США 5892575 «Method and apparatus for imaging a scene using a light detector operating in non-linear geiger-mode», опубликованном в апреле 1999 г., описано устройство, которое включает в себя источник импульсного оптического излучения, направляющий излучение на зондируемый объект, оптическую систему, собирающую оптическое излучение и направляющую его на фотоприемное устройство, выполненное в виде массива сенсоров, в качестве которых используются лавинные диоды, работающие в режиме счетчика Гейгера (SPAD), систему измерения времени пролета испускаемого оптического импульса до поверхности объекта и обратно до фотоприемного устройства, вычислительного устройства (процессора) и дисплея для отображения информации. Система подсчета времени фиксирует время (отсчитываемое в импульсах тактового генератора от момента начала испускания) между началом испускания оптического импульса и временем срабатывания соответствующего сенсора массива, реагирующего на одиночные фотоны. При срабатывании соответствующего сенсора к моменту времени срабатывания, отсчитываемому в импульсах тактового генератора, вычислительным устройством приурочивается соответствующая ячейка памяти, к содержимому которой (изначально нулевому) прибавляется единица.
Сенсоры так же могут срабатывать от сторонних источников излучения и самопроизвольно с определенной средней частотой. Процесс испускания оптических импульсов и вероятностной регистрации/приема порожденных ими фотонов циклический. Процесс завершается при превышении значений, записанных в ячейках памяти, приуроченных к конкретным сенсорам и моментам времени некоторой пороговой величины. Расстояние до области на поверхности зондируемого объекта или цели от соответствующего ей сенсора фотоприемного устройства определяется по номеру импульса тактового генератора, отсчитываемому от начала цикла зондирования, которому соответствует/приурочена ячейка памяти с максимальным записанным в ней значением, превышающим заданный порог обнаружения.
В данном патенте приведен пример надежного измерения расстояния до поверхности объекта при вероятности срабатывания сенсора от отраженного сигнала, порожденного единичным зондирующим импульсом, которая составляет всего 3%.
Однако описанный в этом патенте метод имеет недостаток, связанный с большим временем определения дальности, связанный с тем, что время накопления сигнала кратно времени рекуррентного периода посылки зондирующих импульсов, длительность которого больше максимальной разрешаемой дальности Rmax, умноженной на 2/С.
Так допустим, если вероятность обнаружения отраженного сигнала, порожденного единичным излучающим импульсом (отраженным от отражающего объект), на отрезке времени То составляет 5%, то для измерения относительной отражающей способности от объекта (измеряемой в срабатываниях сенсора в секундах) со среднеквадратическим отклонением 5% необходимо произвести подсчет принятых фотонов на 8000 отрезках То σ = 0.05 = 1/(0.05⋅8000)1/2.
Таким образом, время измерения возрастает до
8000⋅ТR, где ТR - рекуррентный период, который не может быть меньше, чем Rmax⋅2/С, где Rmax - максимальная разрешаемая дальность, а С – скорость света.
Так для Rmax =10 км при накоплении сигнала за 8000 рекуррентных периодов потребуется не менее 0.53 с.
Данный недостаток устраняется за счет использования в качестве зондирующих сигналов оптического диапазона, модулированного ПШП. Это позволяет при той же мощности оптического источника излучения сократить время накопления соразмерно длительности ПШП, содержащей количество оптических импульсов соразмерное числу рекуррентных периодов при моноимпульсном зондировании.
В заявке на патент США 20150120241, опубликованной в апреле 2015, указано, что для приема отраженных от объекта оптических ПШП можно использовать так называемые SPAD (однофотонные лавинные диоды).
Однако использование методов зондирования с использованием ПШП имеет недостатком то, что в силу ограниченности динамического диапазона приемного устройства, при приеме сигнала, представляющего собой суперпозицию двух и более оптических ПШП и шумовой составляющей сигнала, суммарная измеряемая интенсивность излучения не всегда может быть измерена корректно.
Так, например, в случае использования в качестве приемника излучения лавинного диода, работающего в нелинейном режиме счетчика Гейгера, существует отрезок времени между моментом образования лавины, инициированной принятым фотоном, ее гашением, а также между гашением и восстановлением (этот отрезок времени называют мертвым временем, обозначаемым как, Тd). В этот промежуток времени регистрация других дополнительных фотонов невозможна.
Таким образом, какой бы не была интенсивность принимаемого излучения на отрезке времени не более Td можно зафиксировать не более одного фотона. К этому следует добавить, что только часть (в зависимости от типов сенсоров и длины волны) от 1-2% до 90% фотонов, попавших на поверхность лавинного фотодиода, вызывает лавинный процесс. Поэтому очевидно, что излучения с интенсивностью оптического излучения, попадающие на приемную поверхность сенсора, работающего в нелинейном режиме счетчика Гейгера, и измеряемые в количестве срабатываний сенсора за единицу времени, больше чем 1/Тd, измеряться не могут.
Параметр 1/Тd называется максимальной частотой счета/регистрации фотонов и определяет верхнюю границу динамического диапазона приемных устройств на основе приемников единичных фотонов.
Параметр, определяемый, как среднее количество ложных регистраций фотонов за единицу времени определяет соответственно нижнюю границу динамического диапазона однофотонного приемного устройства (может составлять единицы ложных срабатываний в секунду).
Недостатком лидаров, рефлектометров, использующих в качестве зондирующих сигналов оптические ПШП, а качестве приемных сенсоров устройства, работающие в нелинейном режиме, характеризующиеся ограничением роста тока при увеличении интенсивности принимаемого излучения, или лавинообразным увеличение роста тока, обусловленного ударной ионизацией (режим счетчика Гейгера), является то, что отраженный принимаемый сигнал будет являться суперпозицией оптических сигналов от объекта/-ов расстояние до которого измеряется, так и сигналы от других (объектов). Причем интенсивность сигналов от всех или некоторых объектов может быть выше верхнего порога линейности приемного устройства.
На фиг. 3 приведена экспериментально полученная зависимость вероятности обнаружения фотона за время То = 490 ps от интенсивности излучения, выраженной в среднем числе фотонов поступающих на поверхность исследуемого сенсора за время То. Фигура 3 взята из Optics Express Vol. 18 (2010), Issue 6, pp. 5906-5911 // Method for characterizing single photon detectors in saturation regime by cw laser // J.Oh, C.Antonelli, M.Tur, M.Brodsky https://doi.org/10.1364/OE.18.005906
Действительно, если внутри временного интервала То, вероятность срабатывания приемного устройства (сенсора) работающего в режиме счетчика Гейгера от излучения, порожденного первым источником излучения, составляет 10%, а вероятность срабатывания того же сенсора от излучения, порожденного вторым источником излучения составляет 98%, то вероятность обнаружения за время То излучения, являющегося суперпозицией излучений от обоих источников будет близка к 98%.
При сложении излучений от двух источников вероятность обнаружения фотона от которых за время То составляет 5%, вероятность обнаружения будет близка к 10%, т.е. вероятность срабатывания сенсора за время То зависит аддитивно от интенсивностей источников излучения, в случае если суперпозиция излучений не превышает диапазон линейной зависимости вероятности срабатывания сенсора от интенсивности (см. фигуру 3). Благодаря этому становится возможным выделение (обнаружение) детектированных при помощи сенсора, работающего в режиме счетчика Гейгера псевдошумовых сигналов, интенсивности оптических импульсов которых находятся в диапазоне линейной зависимости вероятности срабатывания сенсора от интенсивности излучения каждого оптического импульса в ПШП, подаваемого на приемную поверхность сенсора. Выделение сигналов осуществляется путем вычисления корреляции между опорным и принятым при помощи сенсора сигналом.
Если же интенсивности оптического излучения в сигнале, являющимся суперпозицией псевдошумовых сигналов от разрешаемых объектов, превышают порог линейности, то это приводит к тому, что при последующей корреляционной обработке будет наблюдаться подавление сигналов от разрешаемых объектов (снижение амплитуды корреляционного отклика от разрешаемого объекта), появление ложных корреляционных откликов в полученной в результате корреляционной обработки рефлектограмме. Подобного рода искажения принято называть нелинейными искажениями.
Если в моноимпульсных лидарах, в том числе и с накоплением принимаемого сигнала, возможно устранение отраженных сигналов, от посторонних объектов, (которыми могут быть сетка/забор, кустарник, аэрозоль), эффективно отражающих оптический сигнал и расположенных перед/после объекта, расстояние до которого измеряется путем записи/накопления сигнала только в нужном (предварительно заданном) временном интервале, то при использовании в качестве зондирующего оптической ПШП это становится невозможным т.к. оптические сигналы от различных объектов накладываются друг на друга во времени.
Приведем примеры, показывающие существующее снижение возможностей по обнаружению/выделению оптического псевдошумового сигнала, отраженного от зондируемого объекта при смешении его с другими оптическими псевдошумовыми сигналами, интенсивности оптических импульсов в которых существенно превышают диапазон линейности приемного устройства, работающего в режиме счета фотонов, и примеры показывающие преодоление этого недостатка.
Пример 2. ( Два «слабых» сигнала)
До момента детектирования сенсором, работающем в режиме счета фотонов, принимаемый сигнал является суперпозицией двух оптических ПШП «один» и «два» с интенсивностями оптических импульсов в последовательностях в границах диапазона линейности сенсора. Вероятность срабатывания сенсора от каждого оптического импульса в оптической ПШП составляет ≈10%. Сигнал «два» представляет собой сигнал «один», задержанный на время 50Тo. Оптические сигналы «один» и «два» моделируют отраженные сигналы от двух объектов расположенных в створе направленного на них излучения, от модулируемого ПШП источника излучения. Объект «два» расположен по ходу луча от лидара (рефлектометра) дальше на 25Тo/С, чем объект «один». То составляет 500 ps, частота ложных срабатываний приемного сенсора составляет 3 MHz. Время в цикле зондирования отсчитывается от начала цикла зондирования по синхроимпульсам с периодом повторения То. Момент времени, в цикле зондирования, попадающий во временной интервал, начало которого ≈То⋅(n-1) и окончание ≈То⋅(n), приурочивается к номеру синхроимпульса n, отсчитываемому в каждом цикле зондирования от начала цикла зондирования.
Осуществляются четыре цикла зондирования. В каждом цикле зондирования используется своя уникальная зондирующая оптическая ПШП, состоящая из 512 позиций, занимающих временной интервал 4⋅То каждая. На временной позиции происходит излучение или не излучение оптического импульса длительности Ti менее или немного более To. Значению члена модулирующей ПШП последовательности «0» соответствует «не излучение», а «1» соответственно «излучение». Все ПШП, используемые для модуляции псевдошумового оптического сигнала, получены из двух дополнительных ПШП длины 512, члены которых принимают значения «+1» и «–1». В первом цикле зондирования для модулирования используется ПШП, полученная из первой дополнительной последовательности путем замены в ней «-1» на «0». Во втором цикле полученная из первой дополнительной последовательности путем замены в ней «1» на «0», а «-1» на «1». Во втором цикле зондирования для модулирования используется ПШП, полученная из второй дополнительной последовательности путем замены в ней «-1» на «0». В третьем цикле полученная из второй дополнительной последовательности путем замены в ней «1» на «0», а «-1» на «1».
Прием оптического сигнала осуществляется следующим образом. В каждом цикле зондирования, при регистрации оптического излучения в момент времени, приуроченный к номеру синхроимпульса n, на вычислитель/согласованный фильтр на n-ом такте (отсчитываемом от начала цикла зондирования) подается «1» в циклах зондирования с четными номерами или «-1» в циклах зондирования с нечетными номерами. Последовательности, считываемые с выхода вычислителя/согласованного фильтра, прибавляются к содержимому ячеек памяти блока накопления. Перед первым циклом зондирования содержимое ячеек памяти блока накопления было обнулено. Ячейки памяти в блоке накопления приурочены к номерам членов последовательности считываемой с вычислителя/согласованного фильтра в каждом цикле зондирования.
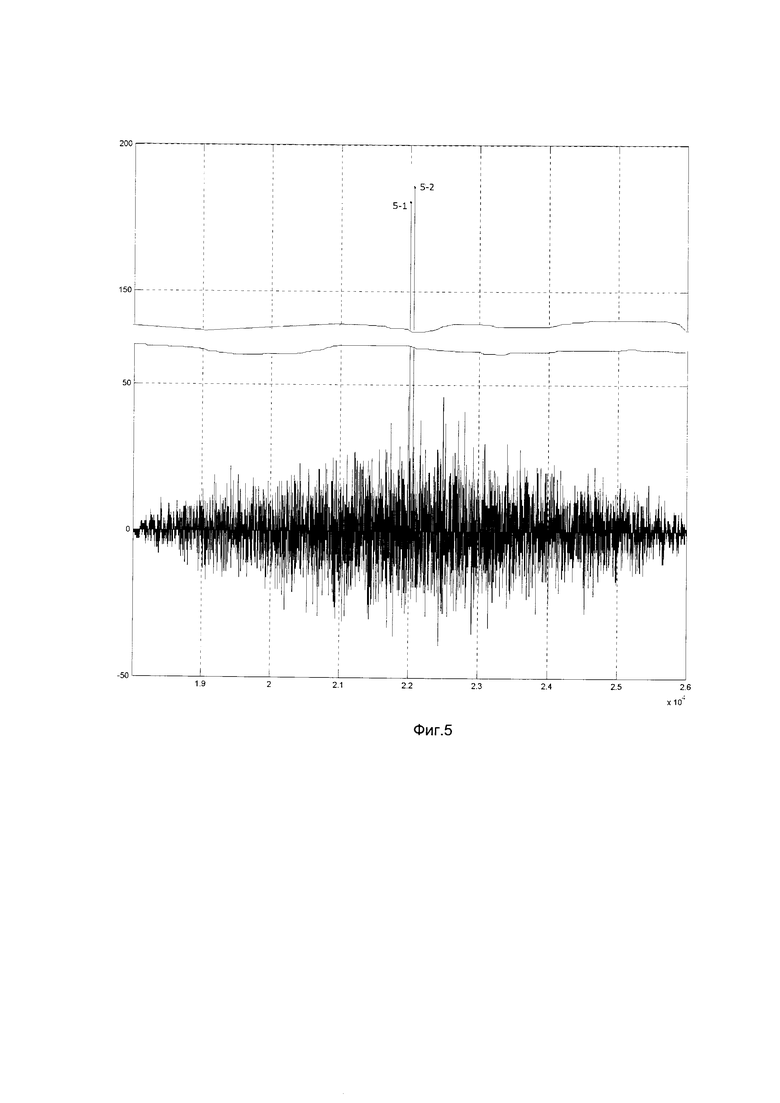
На фиг. 5 приведен фрагмент дискретной последовательности (рефлектограммы), полученной в результате считывания содержимого ячеек памяти блока накопления, после накопления в нем четырех последовательностей, полученных с выхода вычислителя/согласованно фильтра в четырех циклах зондирования. На оси абсцисс графика на фиг. 5 отложены номера ячеек памяти блока накопления (с номерами, соответствующими номерам синхроимпульсов, отсчитываемых в каждом цикле зондирования), а на оси ординат – амплитуды, считываемые с ячеек памяти блока накопления с соответствующими оси абсцисс номерами.
Видны отклики 5-1 и 5-2, позволяющие различить/обнаружить сигнал «один» и сигнал «два» и определить задержку между ними, равную 50Тo.
Пример 3. («Слабый» сигнал при наличии «сильных»)
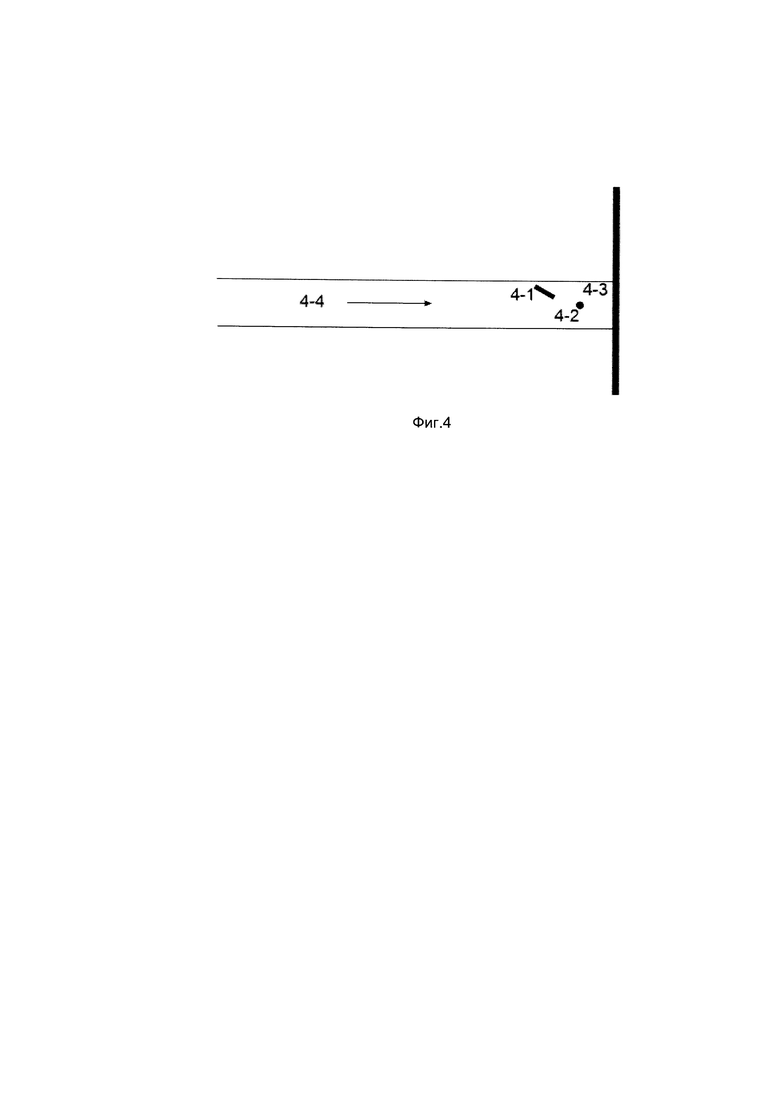
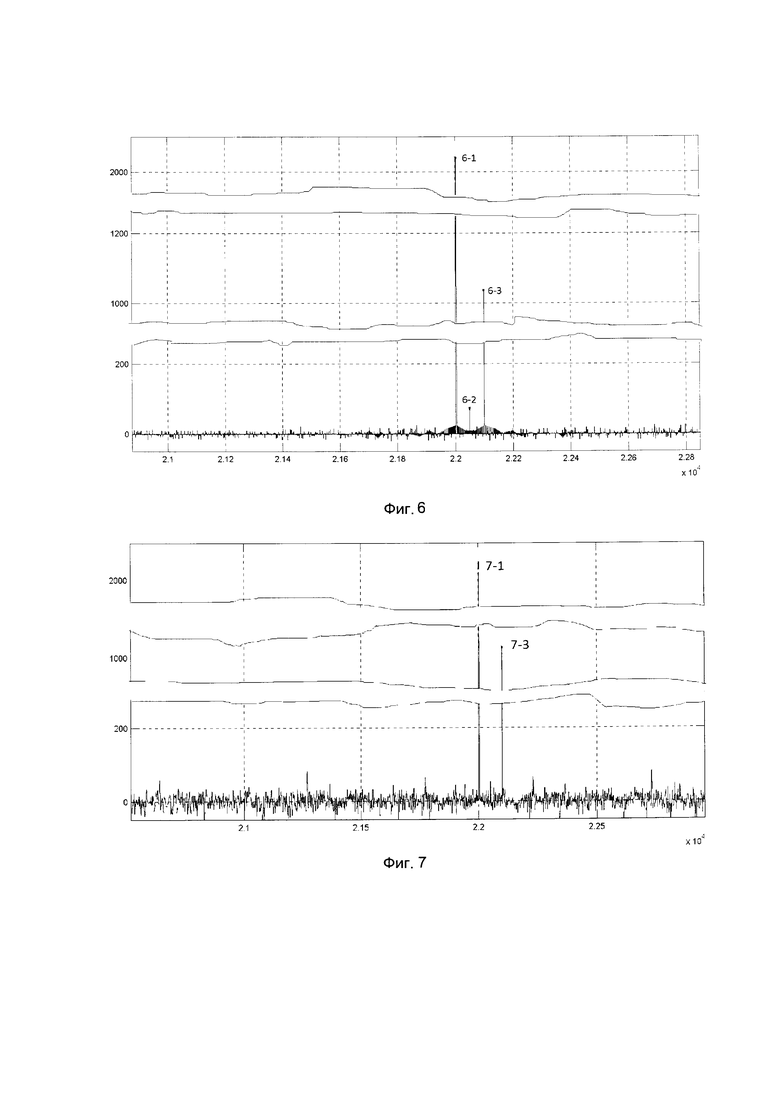
Отличие от примера 1 состоит в том, что в створе луча, направленного на объекты оптического излучения, от модулируемого ПШП источника излучения находятся три объекта, схематически отраженные на фиг. 4.
Как отображено на фиг. 4, перед зондируемым объектом 4-2 расположен протяженный отражающий объект 4-1, а за зондируемым объектом 4-2 расположена отражающая перегородка 4-3. На объекты 4-1, 4-2, 4-3 направлено зондирующее оптическое излучение 4-4. Вероятность срабатывания приемного сенсора лидара (рефлектометра) от каждого единичного оптического импульса (в оптической зондирующей ПШП), отраженного от объекта 4-2 и принимаемого сенсором, работающим в режиме счетчика Гейгера, составляет ≈10%. Вероятность срабатывания сенсора от единичного оптического импульса, отраженного от объекта 4-3 (отражающая перегородка), составляет ≈98%. Протяженный по направлению зондирующего излучения объект 4-1 отражает на сенсор лидара растянутый во времени световой импульс, вызывающий от четырех до пяти срабатываний сенсора за время 5То, характеризующее протяженность объекта 4-1.
Расстояние от фронтальной к источнику излучения поверхности передней кромки объекта 4-1 до зондируемого объекта составляет 25То/С, а до отражающей перегородки 50To/С.
На фиг. 6 приведен фрагмент дискретной последовательности (рефлектограммы), полученной в результате считывания содержимого ячеек памяти блока накопления после четвертого цикла зондирования. Видны отклики 6-1 и 6-2, 6-3, позволяющие различить/обнаружить сигналы от протяженного объекта 4-1, зондируемого объекта 4-2 и отражающей перегородки 4-3.
Пример 4 отличается от примера 3 тем, что все ПШП, используемые для модуляции псевдошумового оптического сигнала, получены из двух бинарных ПШП длины 512, не являющихся дополнительными.
На фиг. 7 приведен фрагмент дискретной последовательности (рефлектограммы), полученной в результате считывания содержимого ячеек памяти блока накопления после четвертого цикла зондирования. На фиг. 7 четко видны отклики 7-1 и 7-3, позволяющие различить/обнаружить сигнал от протяженного объекта 4-1 и отражающей перегородки 4-3. Сигнал от объекта 4-2 по амплитуде не выделяется на фоне шумовой составляющей рефлектограммы.
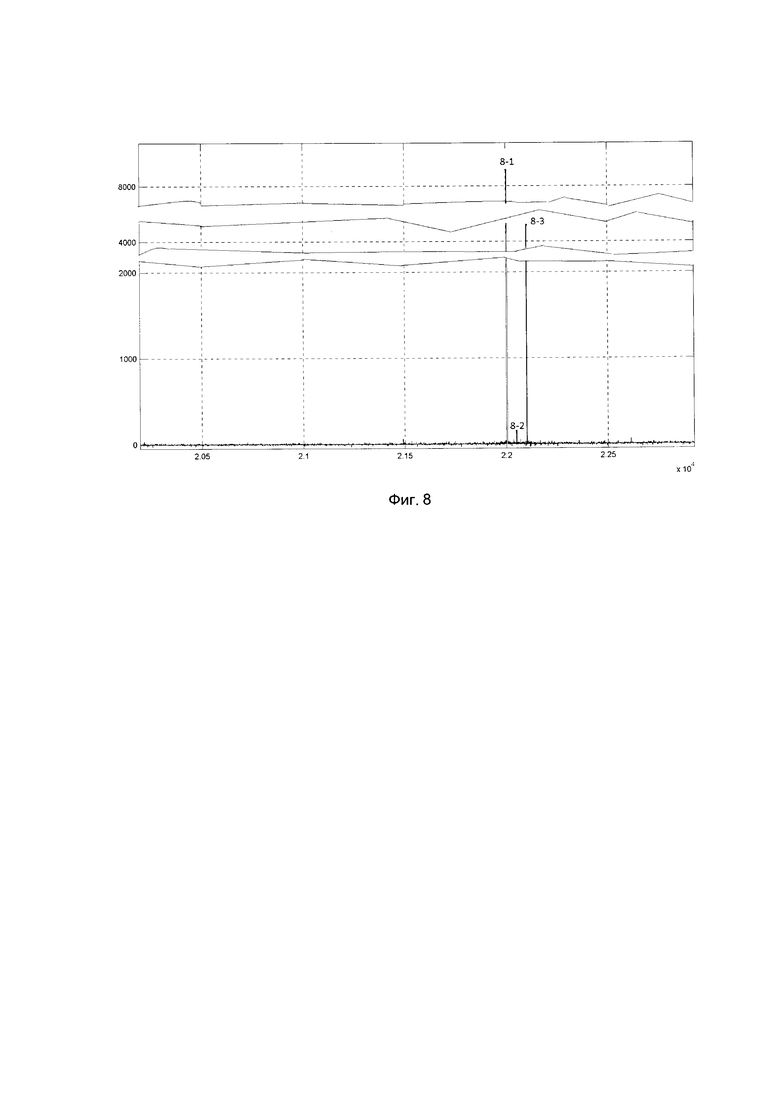
Пример 5 отличается от примера 3 тем, что вероятность срабатывания сенсора от каждого одиночного оптического импульса, отраженного от объекта 4-2, в оптической ПШП составляет ≈4%. Число циклов зондирования увеличено до 16. В каждых последующих четырех циклах зондирования для модуляции используются две уникальные дополнительные последовательности длины 512.
На фиг. 8 приведен фрагмент дискретной последовательности (рефлектограммы), полученной в результате считывания содержимого ячеек памяти блока накопления после 16-го цикла зондирования. Видны отклики 8-1, 8-2, 8-3, позволяющие различить/обнаружить сигнал от протяженного объекта 4-1, точечного объекта 4-2 и отражающей перегородки 4-3. Отклик от объекта 4-2 по амплитуде ярко выделяется на фоне шумовой составляющей рефлектограммы.
В ходе исследований было сделано наблюдение о том, что использование способа (модулирования зондирующих сигналов и их последующей обработки), описанного в патенте РФ № 2605628, опубликован в 2016 году, позволяет эффективно различать/выделять одновременно принимаемые сигналы с интенсивностью импульсов в ПШП, лежащих в пределах диапазона линейной зависимости сигнала с выхода сенсора от интенсивности излучения на подающегося на поверхность сенсора, так и сигналы с интенсивностью, превышающей диапазон линейной зависимости.
Было также обнаружено, что этот же эффект сохраняется и при замене приемного устройства генерирующего ток, интегрируемый на отрезках То, на бинарное приемное устройство, работающее в режиме счетчика Гейгера. Например, т.н. SPAD или SSPD (сверхпроводящий счетчик одиночных фотонов) сенсоры. Как оказалось, такая замена позволяет выделять зондирующие сигналы при использовании бинарного сенсора даже в том случае если средняя частота срабатываний сенсора составляет до 70% от частоты повторения синхроимпульсов, равной 1/То. Предпочтительно, чтобы средняя частота срабатываний сенсора была менее чем 50% от частоты повторения синхроимпульсов.
Оптическое устройство для определения расстояний до объекта по указанном уровняю техники, описанном в патенте РФ № 2605628, опубликован в 2016 году, включает в себя
• источник излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с выходом
• генератора создания зондирующей последовательности, первый вход которого соединен с первым выходом
• генератора тактового сигнала,
• оптическое приемное устройство, выход которого соединен с входом
• мультиплексора, выход которого соединен с первым входом
• первого блока накопления сигнала, выход которого соединен с первым входом
• модуля вычисления взаимно-корреляционной функции опорного и принятого (детектированного) сигналов, выход которого соединен с первым входом
• второго блока накопления сигнала, выход которого соединен с входом
• демультиплексора, выход которого соединен с входом
• модуля порогового обнаружения сигнала, выход которого соединен с входом
• модуля вычисления расстояния до определяемого объекта по временной задержке принятого сигнала, включающего
• модуль вычисления временной задержки принятого сигнала.
Данное устройство является наиболее близким по технической сути и достигаемому техническому результату и выбрано за прототип предлагаемого изобретения.
Недостатком этого прототипа являются ограниченные возможности по одновременному выделению из принимаемого сигнала, корреляционных откликов, от сигналов, отраженных от зондируемых объектов, в случае если в принимаемом сигнале присутствуют как сигналы с интенсивностями пикового излучения на поверхности сенсора, лежащими в диапазоне линейной зависимости вероятности срабатывания приемного сенсора от интенсивности излучения сигнала на временном интервале заданной длительности, так и сигналы с пиковыми интенсивностями излучения, вызывающими срабатывание сенсора на временном интервале той же длительности с вероятностями, близкими к 100%.
Таким образом, проблемой, на решение которой направлено настоящее изобретение, является узкий динамический диапазон лидара (рефлектометра), плохое разрешение сигналов от объектов с различными ЭПР, использующего в качестве зондирующих сигналов сигналы, модулированные ПШП, а техническим результатом - увеличение динамического диапазона лидара, использующего в качестве зондирующих сигналов сигналы, модулированные ПШП.
Становится возможным принимать совместно и одновременно определять расстояния до поверхностей объектов отражающих сигналы, состоящие из последовательностей коротких оптических импульсов (вспышек) и содержащих единицы фотонов (количество излучаемой энергии). Вероятность срабатывания сенсора от каждого такого импульса в принимаемой последовательности пропорциональна интенсивности излучения оптических импульсов. Так и объектов отражающих сигналы, состоящие из последовательностей коротких оптических импульсов и содержащих количество фотонов (количество излучаемой энергии), достаточное для срабатывания сенсора от каждого такого оптического импульса вероятностью близкой к 100%.
Раскрытие изобретения
Опирающееся на это оригинальное наблюдение настоящее изобретение, главным образом, имеет целью предложить оптическое устройство для определения расстояний до объекта, позволяющее, по меньшей мере, сгладить как минимум один из указанных выше недостатков, а именно обеспечить увеличение динамического диапазона лидара, использующего в качестве зондирующих сигналов сигналы, модулированные псевдошумовыми последовательностями, за счет использования в качестве зондирующих сигналов ПШП оптические последовательности, модулированные ПШП, полученными из бинарных дополнительных кодов, а в качестве приемного оптического сенсора приемного тракта лидара бинарный оптический сенсор, работающий в нелинейном режиме счетчика Гейгера и позволяющий вероятностно (с вероятностью регистрации, пропорциональной числу фотонов, содержащихся в коротком оптическом импульсе) регистрировать как короткие оптические импульсы, попадающие на поверхность сенсора и содержащие единицы фотонов, так и оптические импульсы, попадающие на поверхность сенсора и содержащие количество фотонов, заведомо большее чем обязательно приводящее к срабатываю сенсора с вероятностью, близкой к 100%.
Для достижения этой цели:
• устройство включает в себя модуль формирования сигнала на каждом такте n, соответствующего значению 0, если излучение не зафиксировано сенсором на интервале времени начинающемуся по синхроимпульсу n и заканчивающемуся по синхроимпульсу n+1, и 1 или -1 если излучение зафиксировано на этом же интервале времени, первый вход которого соединен с выходом приемного устройства (оптического сенсора), второй вход которого соединен с вторым выходом генератора тактового сигнала, и выход которого соединен с входом мультиплексора,
• устройство включает в себя блок конъюнкции, первый вход которого соединен с третьим выходом генератора тактового сигнала, второй вход которого соединен с выходом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, первый выход которого соединен с третьим входом модуля формирования сигнала на каждом такте, и второй выход которого соединен с вторым входом первого блока накопления сигнала,
• устройство включает в себя блок формирования синхроимпульса на начало цикла зондирования, первый вход которого соединен с четвертым выходом генератора тактового сигнала, первый выход которого соединен со вторым входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, а второй выход которого соединен с входом
• блока подсчета циклов зондирования, выход которого соединен с входом
• блока выборки и обработки зондирующих сигналов, первый выход которого соединен с третьим входом первого блока накопления сигнала 7, второй выход которого соединен со вторым входом модуля 8 вычисления взаимно-корреляционной функции излученного и отраженного сигналов, третий выход которого соединен со вторым входом второго блока накопления сигнала, четвертый выход которого соединен с третьим входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, пятый выход которого соединен со вторым входом генератора создания зондирующей последовательности.
Благодаря данным выгодным характеристикам появляется возможность того, что формируется бинарная последовательность, в которой номер каждого члена приурочен к номеру синхроимпульса, отсчитываемого от момента начала цикла зондирования и принимающего значение «0», если до следующего синхроимпульса не произошло срабатывание сенсора (регистрация кванта оптического излучения), и «1» или «-1», если произошло срабатывание сенсора, это позволяет эффективно выделять зондирующие сигналы (корреляционные отклики) при использовании бинарного сенсора даже в том случае, если средняя частота срабатываний сенсора составляет 70% от частоты синхроимпульсов, равной 1/То.
Существует вариант изобретения, в котором оно включает в себя эталонный источник сигналов точного времени и частоты, первый выход которого соединен с входом генератора тактового сигнала, а второй выход которого соединен со вторым входом блока формирования синхроимпульса на начало цикла зондирования.
Благодаря данным выгодным характеристикам появляется возможность синхронизации работы оптических устройств по времени, что позволяет одновременно работать нескольким оптическим устройствам по одним и тем же зондируемым объектам в одном и том же частотном (оптическом) диапазоне.
Существует, кроме того, вариант изобретения, в котором сенсор детектирования отраженного оптического сигнала, или само оптическое устройство, или приемный тракт оптического устройства расположен на устройстве оптической стабилизации или оснащен устройством оптической стабилизации.
Благодаря данной выгодной характеристике появляется возможность расширения использования предлагаемого решения для транспортных средств, в частности для беспилотных летательных аппаратов, которые могут использовать предлагаемое решение в качестве основы технического зрения.
Существует возможный вариант изобретения, в котором оптически чувствительный элемент детектирования отраженного оптического сигнала имеет поляризационный фильтр, размещенный перед входом оптического сигнала на оптически чувствительный элемент.
Благодаря данной выгодной характеристике появляется возможность повышать соотношение сигнал/шум и, следовательно, повышать точность измерений расстояний до отражающих объектов.
Существует возможный вариант изобретения, в котором сенсор детектирования отраженного оптического сигнала от объекта выполнен в виде элементов оптически чувствительной матрицы.
Благодаря данной выгодной характеристике появляется возможность одновременно получать рефлектограммы/измерять расстояния до множества объектов, лежащих в угле поля зрения оптического тракта сенсора.
Совокупность существенных признаков предлагаемого изобретения неизвестна из уровня техники для способов аналогичного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения в отношении способа. Неочевидность решения говорит о неочевидности решения для специалиста в данной области техники и таким образом о соответствии изобретения критерию «изобретательский уровень».
Краткое описание чертежей
Другие отличительные признаки и преимущества данного изобретения ясно вытекают из описания, приведенного ниже для иллюстрации и не являющегося ограничительным, со ссылками на прилагаемые чертежи, на которых:
- фигура 1 изображает схему последовательно соединенных каскадов, каждый из которых содержит линию задержки и два сумматора, согласно уровню техники,
- фигура 2 изображает последовательность соединения каскадов из фигуры 1 для генерирования дополнительных последовательностей, согласно уровню техники,
- фигура 3 изображает экспериментально полученную зависимость вероятности обнаружения фотона за время То от интенсивности излучения, выраженной в среднем числе фотонов, поступающих на поверхность исследуемого сенсора за время То, согласно уровню техники,
- фигура 4 изображает схему расположения объектов в створе направленного излучения лидара,
- фигуры 5-8 изображают фрагменты дискретной последовательности, полученной в результате считывания содержимого ячеек памяти, согласно уровню техники,
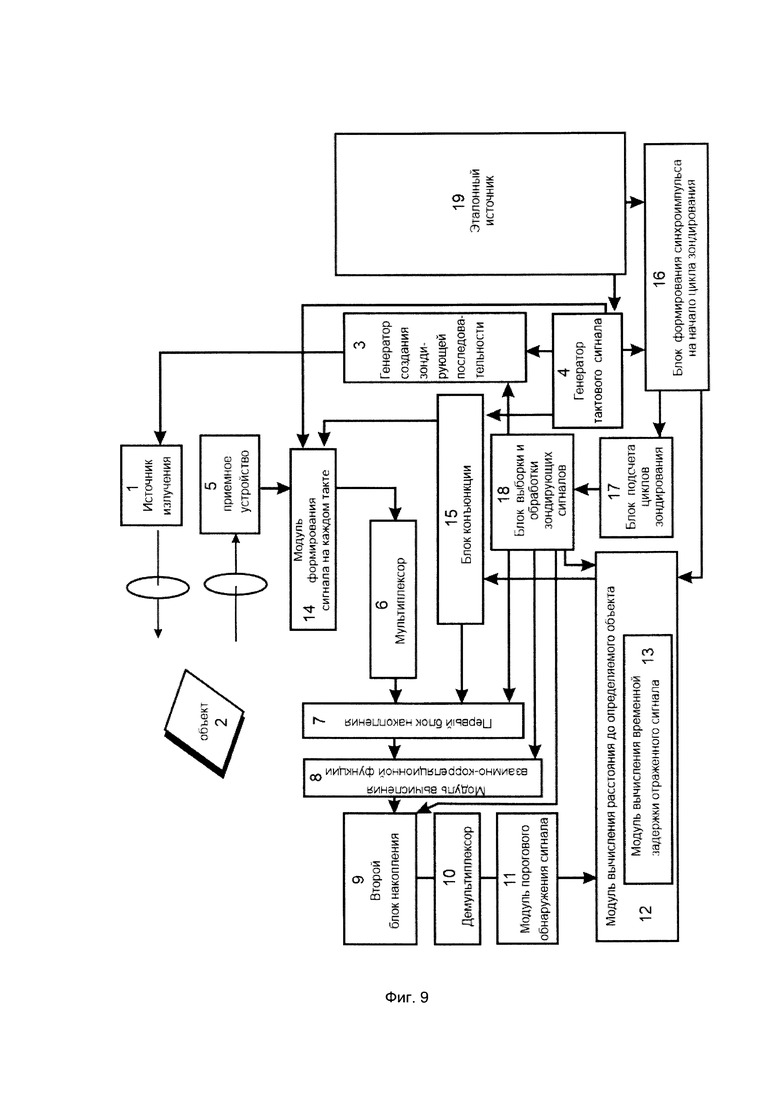
- фигура 9 изображает функциональную схему оптического устройства для определения расстояний до объекта, согласно изобретению,
- фигура 10 изображает этапы работы оптического устройства для определения расстояний до объекта согласно изобретению.
Описание устройства
Согласно фиг. 9 оптическое устройство для определения расстояний до объекта включает в себя:
• источник излучения 1 на объект модулированного бинарного оптического сигнала, вход которого соединен с выходом
• генератора 3 создания зондирующей последовательности, первый вход которого соединен с первым выходом
• генератора 4 тактового сигнала,
• оптическое приемное устройство 5, работающее в нелинейном режиме, выход которого соединен с входом
• мультиплексора 6, выход которого соединен с первым входом
• первого блока накопления сигнала 7, выход которого соединен с первым входом
• модуля 8 вычисления взаимно-корреляционной функции опорного и принятого сигналов, выход которого соединен с первым входом
• второго блока накопления сигнала 9, выход которого соединен с входом
• демультиплексора 10, выход которого соединен с входом
• модуля 11 порогового обнаружения сигнала, выход которого соединен с входом
• модуля 12 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, включающего
• модуль 13 вычисления временной задержки отраженного сигнала,
• устройство включает в себя модуль 14 формирования сигнала на каждом интервале времени начинающемуся по синхроимпульсу n и заканчивающемуся по синхроимпульсу n+1, соответствующего значению 0, если излучение не зафиксировано на приуроченном к такту n интервалу времени, и 1 или -1, если излучение зафиксировано на том же интервале времени, первый вход которого соединен с выходом приемного устройства (оптического сенсора) 5, второй вход которого соединен со вторым выходом генератора тактового сигнала 4 и выход которого соединен с входом мультиплексора 6,
• устройство включает в себя блок 15 конъюнкции, первый вход которого соединен с третьим выходом генератора тактового сигнала 4, второй вход которого соединен с выходом модуля 12 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, первый выход которого соединен с третьим входом модуля 14 формирования сигнала на каждом такте, и второй выход которого соединен с вторым входом первого блока накопления сигнала 7,
• устройство включает в себя блок 16 формирования синхроимпульса на начало цикла зондирования, первый вход которого соединен с четвертым выходом генератора тактового сигнала 4, первый выход которого соединен со вторым входом модуля 12 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, а второй выход которого соединен с входом
• блока 17 подсчета циклов зондирования, выход которого соединен с входом
• блока 18 выборки и обработки зондирующих сигналов, первый выход которого соединен с третьим входом первого блока накопления сигнала 7, второй выход которого соединен со вторым входом модуля 8 вычисления взаимно-корреляционной функции излученного и отраженного сигналов, третий выход которого соединен со вторым входом второго блока накопления сигнала 9, четвертый выход которого соединен со третьим входом модуля 12 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, пятый выход которого соединен со вторым входом генератора создания зондирующей последовательности 3.
Устройство опционально включает в себя эталонный источник 19 сигналов точного времени и частоты, первый выход которого соединен с входом генератора тактового сигнала 4, а второй выход которого соединен со вторым входом блока 16 формирования синхроимпульса на начало цикла зондирования.
Источник излучения 1 на объект/среду модулированного бинарного оптического сигнала может содержать последовательно соединенные модулируемый генератор коротких затравочных импульсов, модуль чирпирования затравочных импульсов, усилитель чармированных импульсов и модуль сжатия чирпированных импульсов. Модуль сжатия чирпированных импульсов может располагаться непосредственно перед оптическим сенсором (приемным устройством) 5. На фиг. 9 не показаны.
Сенсор (приемное устройства) 5 (он же оптически чувствительный элемент детектирования отраженного оптического сигнала, или само оптическое устройство, или приемный тракт оптического устройства) может быть расположен на устройстве гироскопической стабилизации или содержит устройство оптической стабилизации. На фиг. 9 не показаны.
Сенсор 5 может иметь поляризационный фильтр, размещенный перед входом оптического сигнала на светочувствительный элемент. На фиг. 9 не показаны.
Сенсор приемного устройства 5 может быть выполнен в виде элементов оптически чувствительной матрицы.
Осуществление изобретения
Согласно фиг. 10 оптическое устройство для определения расстояний до объекта работает следующим образом.
Приведем наиболее исчерпывающий пример реализации изобретения, имея в виду, что данный пример не ограничивает применения изобретения.
Этап Э1. Создают генератором 3 создания зондирующей последовательности модуляцию в виде бинарной псевдошумовой последовательности, согласованной с вычислителем ВКФ и излучают ее в пространство.
Этап Э2. Принимают отраженный от объектов сигнал оптическим приемным устройством 5.
Этап Э3. Формируют бинарный цифровой код модулем 14.
Этап Э4. Мультиплексируют с помощью модуля 6 сформированный на этапе 3 код на первый блок накопления 7.
Этап Э5. Подают бинарный цифровой код в первый блок накопления 7, в котором осуществляется накопление дискретного сигнала путем суммирования или вычитания отсчетов, получаемых с выхода модуля формирования 14. Перед пуском устройства все ячейки памяти первого блока накопления обнуляются.
Этап Э6. Считывают сигнал (последовательность), накопленный в ячейках памяти блока накопления 7, и подают его на модуль вычисления ВКФ 8.
Этап Э7. Подают последовательность с модуля вычисления ВКФ 8 на второй блок накопления 9 в виде дискретного сигнала путем суммирования или вычитания отсчетов, получаемых с выхода модуля вычисления ВКФ 8 с содержимым ячеек памяти. Перед пуском устройства все ячейки памяти первого блока накопления 7 обнуляются.
Этап Э8. Демультиплексируют с помощью модуля 10 (считывают в определенном порядке) содержимое ячеек памяти со второго блока накопления 9 на модуль порогового обнаружения сигнала 11, соответствующий определенному пикселу (светочувствительному элементу детектирования принимаемого сигнала с приемного устройства 5).
Этап Э9. При превышении порогового значения одним или двумя последовательными отсчетами выборки передают амплитуды и номера этих отсчетов на модуль 12 вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала.
Этап Э10. Вычисляют расстояние до отражающего объекта.
Этап Э11. Повторяют этапы Э1-Э10.
Промышленная применимость
Предлагаемое оптическое устройство для определения расстояний до объекта может быть осуществлено специалистом на практике и при осуществлении обеспечивает реализацию заявленного назначения, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
В соответствии с предложенным изобретением были проведены расчеты работы оптического устройства для определения расстояний до объекта.
Расчеты работы устройства показали, что оно обеспечивает возможность работы лидара в случае если отраженный сигнал представляет собой суперпозицию сигналов, отраженных от определяемых/зондируемых объектов, причем суперпозиция сигналов содержит хотя бы один отраженный сигнал с интенсивностями световых импульсов, превышающими динамический диапазон оптического приемного устройства, при этом устройство обеспечивает надежное обнаружение сигналов от всех объектов.
При этом если в способе по патенту РФ № 2605628 принимаемый сигнал формировался в виде цифровой последовательности подаваемой на первый блок накопления, где номер члена последовательности приурочен к номеру синхроимпульса, по которому начинается или оканчивается интегрирование фототока на интервале времени То, то в настоящем изобретении формируется бинарная последовательность, в которой номер каждого члена приурочен к номеру синхроимпульса, отсчитываемого от момента начала цикла зондирования и принимающего значение «0», если до следующего синхроимпульса не произошло срабатывание сенсора (регистрация канта оптического излучения), и «1» или «-1», если произошло срабатывание сенсора.
Таким образом, в данном изобретении достигнута поставленная задача – увеличение динамического диапазона лидара, использующего в качестве зондирующих сигналов сигналы, модулированные псевдошумовыми последовательностями, за счет использования в качестве зондирующих сигналов ПШП оптические последовательности, модулированные ПШП, полученными из бинарных дополнительных последовательностей, а в качестве приемного оптического сенсора, бинарный оптический сенсор, работающий в нелинейном режиме счетчика Гейгера и позволяющий вероятностно (с вероятностью регистрации пропорциональной числу фотонов содержащихся в коротком оптическом импульсе) регистрировать, как короткие оптические импульсы, попадающие на поверхность сенсора и содержащие единицы фотонов, так и оптические импульсы, попадающие на поверхность сенсора и содержащие количество фотонов, заведомо большее, чем обязательно приводящее к срабатываю сенсора с вероятностью, близкой к 100%.
Рекомендуется применять данное изобретение для:
- систем технического зрения, в том числе и для летательных аппаратов, робототехнических систем, некогерентных рефлектометрах, радарах терагерцевого диапазона.
Несмотря на то, что изобретение было подробно описано на примерах вариантов, которые представляются предпочтительными, необходимо помнить, что эти примеры осуществления изобретения приведены только в целях иллюстрации изобретения. Данное описание не должно рассматриваться как ограничивающее объем притязаний изобретения, поскольку в схему описанного изобретения специалистами в области обработки сигналов и проектирования интегральных микросхем, и др. могут быть внесены изменения, направленные на то, чтобы адаптировать изобретение конкретным устройствам или ситуациям, и не выходящим за рамки прилагаемой формулы изобретения. Специалисту в данной области техники понятно, что в пределах сферы действия изобретения, которая определяется пунктами формулы изобретения, возможны различные варианты и модификации, включая эквивалентные решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2016 |
|
RU2626973C1 |
| УСТРОЙСТВО И СПОСОБ ПРИЕМА ОПТИЧЕСКОГО СИГНАЛА, ОТРАЖЕННОГО ОТ ЗОНДИРУЕМОГО ОБЪЕКТА | 2021 |
|
RU2778546C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2014 |
|
RU2577079C1 |
| СПОСОБ И ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ ДО ОБЪЕКТА | 2015 |
|
RU2605628C1 |
| Устройство для измерения распределения скоростей подвижных слоев по дальности | 1990 |
|
SU1780070A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2019 |
|
RU2720268C1 |
| КОМПЛЕКС ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ И ОПТИЧЕСКОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО КОМПЛЕКСА | 2012 |
|
RU2515957C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490672C1 |
| СПОСОБ ГЛУБИННОЙ ГЕОРАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2816128C1 |
| Устройство для счета фотонов | 1983 |
|
SU1114897A1 |
Изобретение относится к области измерения расстояний до объекта с помощью электромагнитных волн. Оптическое устройство для определения расстояний до объекта включает в себя источник излучения на объект модулированного бинарного оптического сигнала, генератор создания зондирующей последовательности, генератор тактового сигнала, оптическое приемное устройство, работающее в нелинейном режиме, первый блок накопления сигнала, модуль вычисления взаимно-корреляционной функции опорного и принятого сигналов, второй блок накопления сигнала, демультиплексор, модуль порогового обнаружения сигнала, модуль вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, модуль вычисления временной задержки отраженного сигнала. Оптическое устройство также включает в себя модуль формирования сигнала на каждом такте n, соответствующего значению 0, 1 или -1, блок конъюнкции, блок формирования синхроимпульса на начало цикла зондирования, блок подсчета циклов зондирования, блок выборки и обработки зондирующих сигналов. Технический результат заключается в увеличении динамического диапазона лидара, использующего в качестве зондирующих сигналов сигналы, модулированные псевдошумовыми последовательностями. 4 з.п. ф-лы, 10 ил.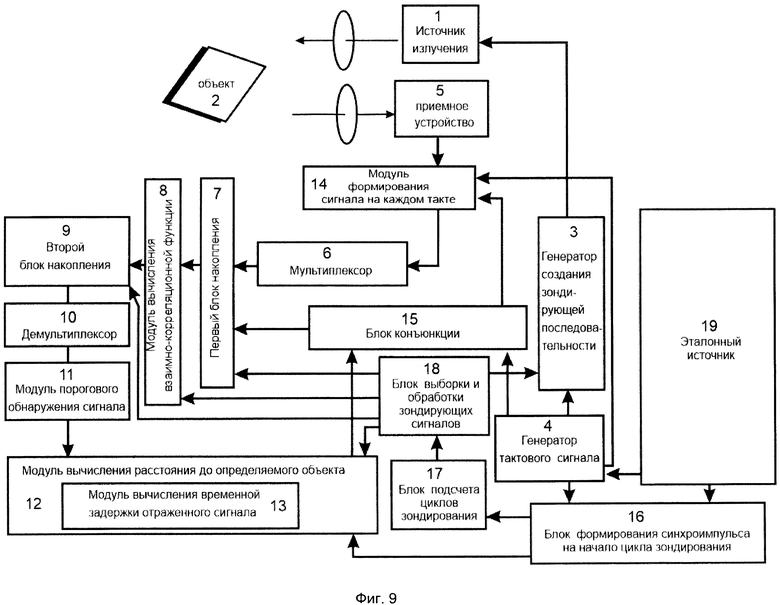
1. Оптическое устройство для определения расстояний до объекта, включающее в себя:
• источник излучения на объект модулированного бинарного оптического сигнала, вход которого соединен с выходом
• генератора создания зондирующей последовательности, первый вход которого соединен с первым выходом
• генератора тактового сигнала,
• оптическое приемное устройство, работающее в нелинейном режиме, выход которого соединен с входом
• мультиплексора, выход которого соединен с первым входом
• первого блока накопления сигнала, выход которого соединен с первым входом
• модуля вычисления взаимно-корреляционной функции опорного и принятого сигналов, выход которого соединен с первым входом
• второго блока накопления сигнала, выход которого соединен с входом
• демультиплексора, выход которого соединен с входом
модуля порогового обнаружения сигнала, выход которого соединен с входом
• модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, включающего
• модуль вычисления временной задержки отраженного сигнала,
отличающееся тем, что
• устройство включает в себя модуль формирования сигнала на каждом такте n, соответствующего значению 0, если излучение не зафиксировано сенсором на интервале времени, начинающемуся по синхроимпульсу n и заканчивающемуся по синхроимпульсу n+1, и 1 или -1, если излучение зафиксировано на этом же интервале времени, первый вход которого соединен с выходом приемного устройства (оптического сенсора), второй вход которого соединен с вторым выходом генератора тактового сигнала, и выход которого соединен с входом мультиплексора,
• устройство включает в себя блок конъюнкции, первый вход которого соединен с третьим выходом генератора тактового сигнала, второй вход которого соединен с выходом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, первый выход которого соединен с третьим входом модуля формирования сигнала на каждом такте, и второй выход которого соединен с вторым входом первого блока накопления сигнала,
• устройство включает в себя блок формирования синхроимпульса на начало цикла зондирования, первый вход которого соединен с четвертым выходом генератора тактового сигнала, первый выход которого соединен со вторым входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, а второй выход которого соединен с входом
• блока подсчета циклов зондирования, выход которого соединен с входом
• блока выборки и обработки зондирующих сигналов, первый выход которого соединен с третьим входом первого блока накопления сигнала, второй выход которого соединен со вторым входом модуля вычисления взаимно-корреляционной функции излученного и отраженного сигналов, третий выход которого соединен со вторым входом второго блока накопления сигнала, четвертый выход которого соединен с третьим входом модуля вычисления расстояния до определяемого объекта по временной задержке отраженного сигнала, пятый выход которого соединен со вторым входом генератора создания зондирующей последовательности.
2. Оптическое устройство по п.1, отличающееся тем, что оно включает в себя эталонный источник сигналов точного времени и частоты, первый выход которого соединен с входом генератора тактового сигнала, а второй выход которого соединен со вторым входом блока формирования синхроимпульса на начало цикла зондирования.
3. Оптическое устройство по п.1, отличающееся тем, что сенсор детектирования отраженного оптического сигнала, или само оптическое устройство, или приемный тракт оптического устройства расположен на устройстве оптической стабилизации или оснащен устройством оптической стабилизации.
4. Оптическое устройство по п.1, отличающееся тем, что оптически чувствительный элемент детектирования отраженного оптического сигнала имеет поляризационный фильтр, размещенный перед входом оптического сигнала на оптически чувствительный элемент.
5. Оптическое устройство по п.1, отличающееся тем, что сенсор детектирования отраженного оптического сигнала от объекта выполнен в виде элементов оптически чувствительной матрицы.
| СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТОВ С ПОМОЩЬЮ ПИКОСЕКУНДНЫХ ИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2195688C2 |
| US 4575237 A, 11.03.1986 | |||
| WO 2012014077 A2, 02.02.2012 | |||
| US 2011205521 A1, 25.08.2011 | |||
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |

