Изобретение относится к медицинской технике, в частности к устройствам для повышения эффективности реабилитации в домашних и амбулаторных условиях для пациентов с ограниченными возможностями.
Известен Tilt-браслет с распознаванием жестов, который разработали студенты СпбПУ [1]. Устройство способно заменить собой пульт, клавиатуру, мышку, джойстик и многие другие управляющие устройства. Распознавая естественные жесты и движения, он делает взаимодействие с цифровой средой более простым и комфортным. При этом руки остаются свободными, чтобы переключаться между сеансами управления различными устройствами, браслет не надо снимать. Встроенного аккумулятора хватает на восемь часов работы без подзарядки. Недостатки: Tilt-браслет не имеет дисплея, не является медицинским устройством.
Известно устройство Даниила Казанцева [2], которое помогает глухим озвучивать свои мысли. Технология изобретения основана на специально обученной глубокой нейронной сети. Она способна с высокой точностью считывать положение и движения рук, а затем интерпретировать жесты в речь. Недостатки: устройство не способно считывать мышечные сокращения при движении пальцами руки.
Известен электростимулятор «Нейромиотест-Ответ-01» [3], который предназначен для оценки нейромышечной функции во время наркоза путем диагностической электростимуляции периферических двигательных нервов и наблюдения выраженности вызванных мышечных ответов.
Недостатки: наличие большого количества внешних проводов с накожными электродами; для установки накожных электродов требуется помощь специалиста; отсутствует дисплей для отслеживания результатов измерений.
Известен электромиограф «Синапсис» [4], который предназначен для проведения рутинных и углубленных исследований биоэлектрической активности мышц и нервных структур. Регистрация производится либо накожными, либо игольчатыми электродами. В базу данных введены нормативные параметры, осуществляется их автоматический сравнительный анализ с реально получаемыми данными. Имеется возможность редактирования полученных результатов при их чтении из базы данных. Отмеченные недостатки: высокие массогабаритные показатели. Электромиограф «Синапсис» весит 5 кг, питается от +5 В (от интерфейса USB ПК, на котором установлено программное обеспечение обрабатывающее данные электромиографии), что ограничивает свободу перемещения и использования электромиографа.
В качестве прототипа выбран патент RU 2720323 C1 «Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы» [5]. Данное изобретение представляет собой тренажер с биологической обратной связью для реабилитации кистей и пальцев рук, состоящий из модуля управления, выполненного в виде полого пластикового корпуса, фиксируемого на предплечье пациента, модуля двигателя сгибания/разгибания кисти руки, дополнительно оснащеннный шаговым двигателем для сгибания/разгибания кисти руки, модулем управления с расположенным в модуле управляющим микроконтроллером, контроллером шагового двигателя для сгибания/разгибания кисти и контроллером для управления сервоприводом, Bluetooth-модулем связи с входящим в комплект тренажера компьютером, модулем сенсора кожно-гальванической реакции организма пациента, модулем миосенсора, модуля преобразователя напряжения питания для шагового двигателя, автономными, независимыми от электросети, источниками электропитания для питания всех электронных компонент и модулей тренажера, подключаемым в Интернет компьютером с установленным на нем специально разработанным программным обеспечением, модулем двигателя для сгибания/разгибания пальцев кисти руки с содержащим обеспечивающий управляемое принудительное сгибание/разгибание пальцев кисти руки сервопривод, перчаткой для фиксации кисти руки на модуле сгибания пальцев кисти руки, оснащенной расположенными внутри пальцев перчатки датчиками давления пальцев кисти руки. Вес заявленного тренажера, без учета веса компьютера, входящего в комплект тренажера, составляет 1,25 кг, длина тренажера - более 200 мм.
Недостатком прототипа являются высокие массогабаритные характеристики и большое количество внешних проводов. Данные недостатки оказывают виляние на процесс реабилитации рук, в виде дополнительной нагрузки в 1,25 кг. на руку и затрудненный процесс надевания тренажера на руку без посторонней помощи. Также к недостаткам можно отнести отсутствие переносного мобильного устройства с дисплеем и установленным программным обеспечением, которое необходимо потребителям, не имеющим компьютер дома для отслеживания прогресса/регресса реабилитации. Данные недостатки вынуждают требовать помощи высококвалифицированных специалистов и не позволяют использование устройства потребителям в домашних условиях.
Техническим результатом изобретения является повышение эффективности реабилитации тремора в домашних условиях и упрощение конструкции устройства.
Технический результат достигается тем, что:
1. Наличие дисплея в модуле управления для предоставленияя обратной связи прохождения реабилитации тремора руки.
2. Малые массогабаритные показатели браслета, а именно уменьшение массы (до 1 кг) и габаритов устройства (длина браслета - менее 200 мм), для снижения нагрузки во время проведения реабилитации. Разработанная конструкция браслета позволяет удобно разместить комплектующие таким образом, чтобы минимизировать габаритные показатели.
3. Браслет конструктивно выполнен таким образом, чтобы была дополнительная возможность регулировать длину браслета под разную ширину предплечья.
4. Значительно уменьшено количество внешних проводов, которые могли бы мешать во время эксплуатации устройства.
Изобретение состоит из браслета, который представляет собой корпус, в котором содержатся микроконтроллер, Bluetooth-модуль, плата управления датчиками, датчики электромиографии и модуль управления, который представляет собой корпус, содержащий в себе микрокомпьютер с установленным программным обеспечением для реабилитации с определенными заданиями, дисплей для отображения графиков электромиографии, средства ввода информации (кнопки) и вывода информации (динамик).
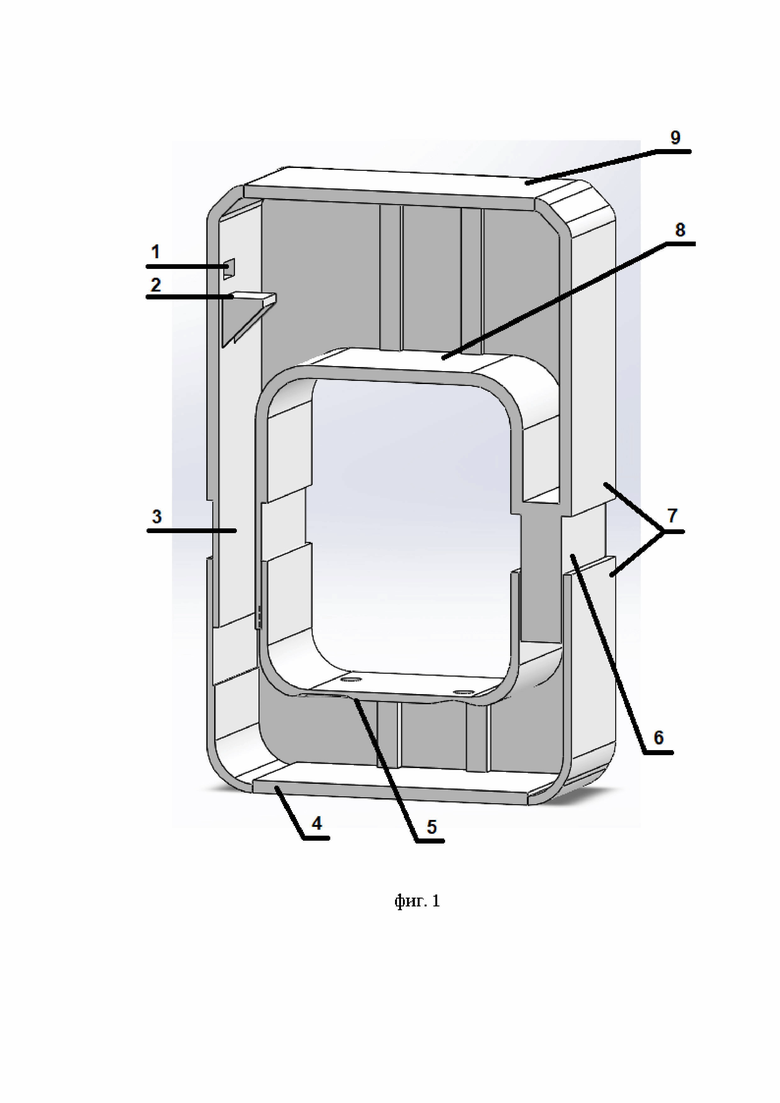
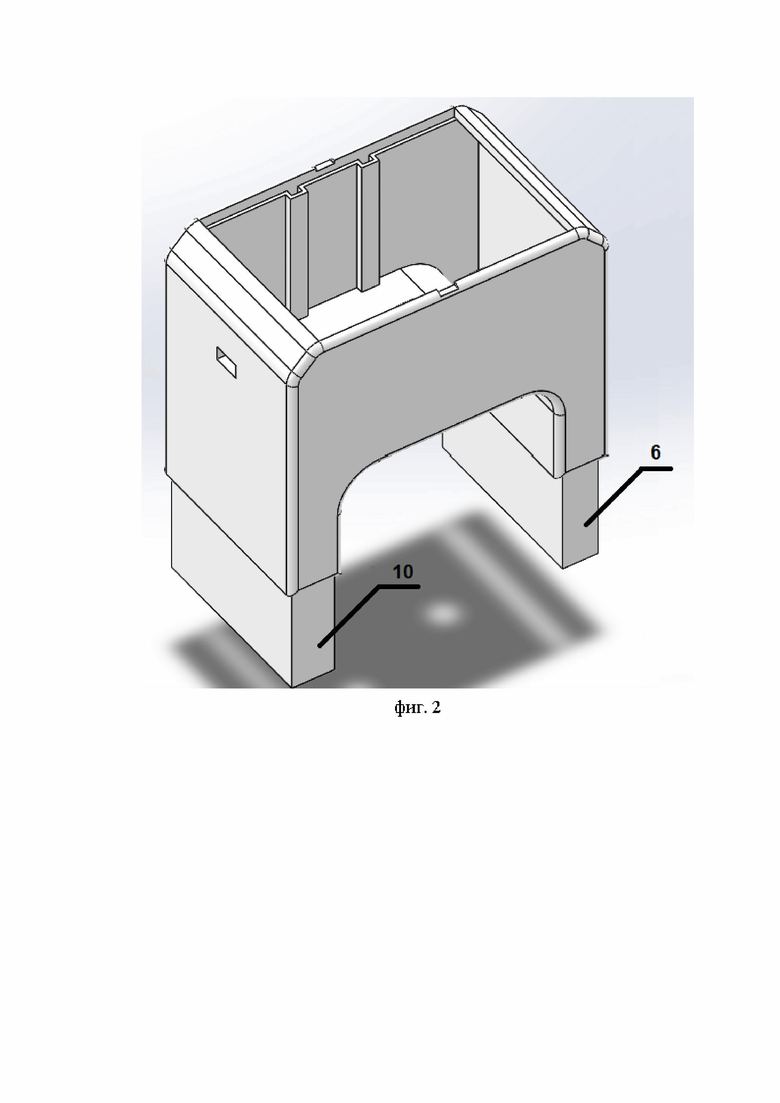
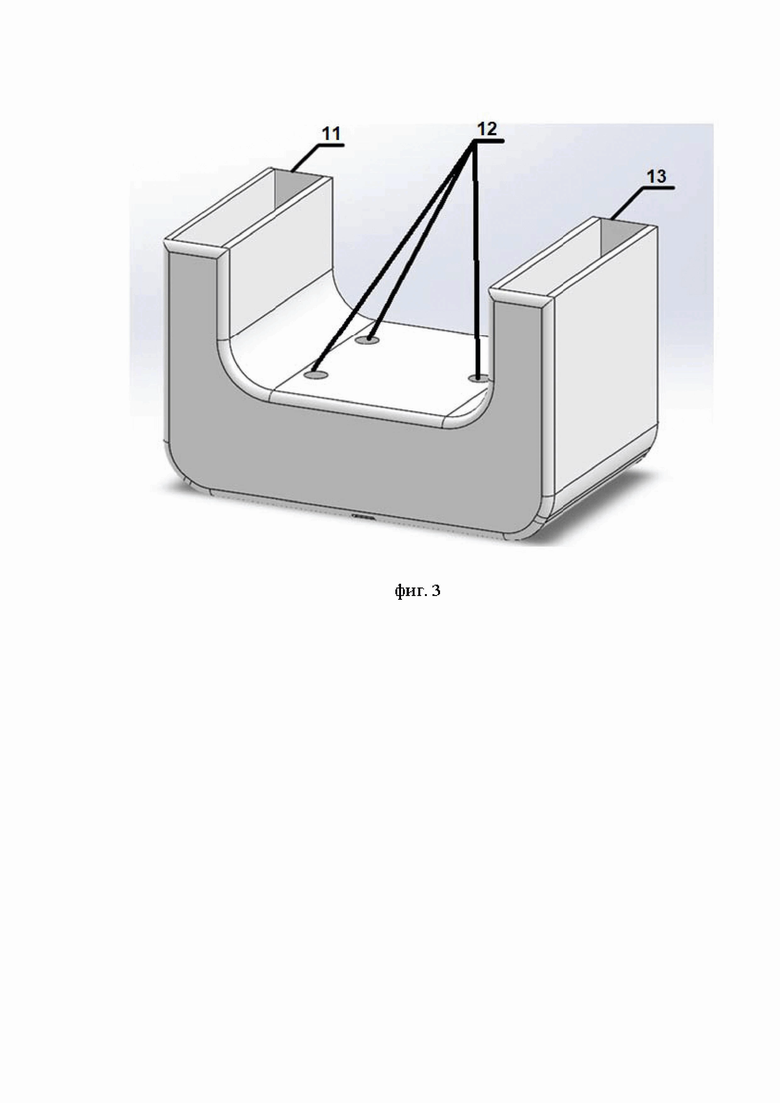
На фиг. 1, фиг. 2, фиг. 3 изображен пластиковый корпус (7) браслета с отверстиями, имеющий площадку (2), предназначенную для расположения на ней микроконтроллера, разъем (1) для электрического питания браслета, верхнюю часть (8), предназначенную для расположения в ней комплектующих, нижнюю часть (5), предназначенную для расположения в ней датчиков электромиографии, боковой проход (3), предназначенный для проводов, также для ремонтоспособности предусмотрены верхняя (9) и нижняя (4) крышки. Боковые части браслета выполнены в длину 30 мм и сконструированы так, что позволяют регулировать его длину для соответствия ширине предплечья пользователя за счет вытягивания и последующей фиксации нижней части в противоположных направлениях от верхней части, что достигается благодаря плотному соединению удлиненных элементов верха браслета (6, 10) с расширенными посадочными отверстиями его нижней части (13, 11) соответственно, так как датчики электромиографии состоят из электрода и клейкой части, электроды расположены во внутренней части корпуса браслета, а клейкие части расположены снаружи корпуса браслета, для обеспечения замены клейких частей выполнены 3 отверстия (12). За счет того, что датчики уже зафиксированы в определённом положении в браслете, пользователю не требуется помощь специалиста для расположения датчиков на руке для эксплуатации устройства.
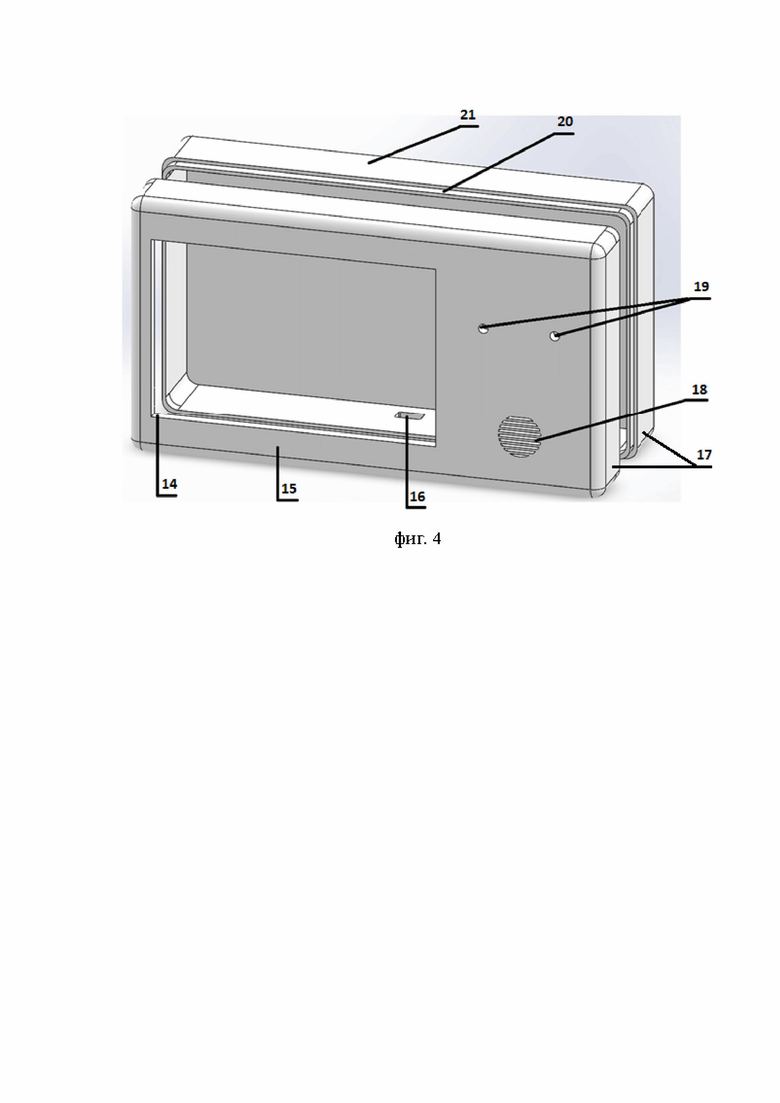
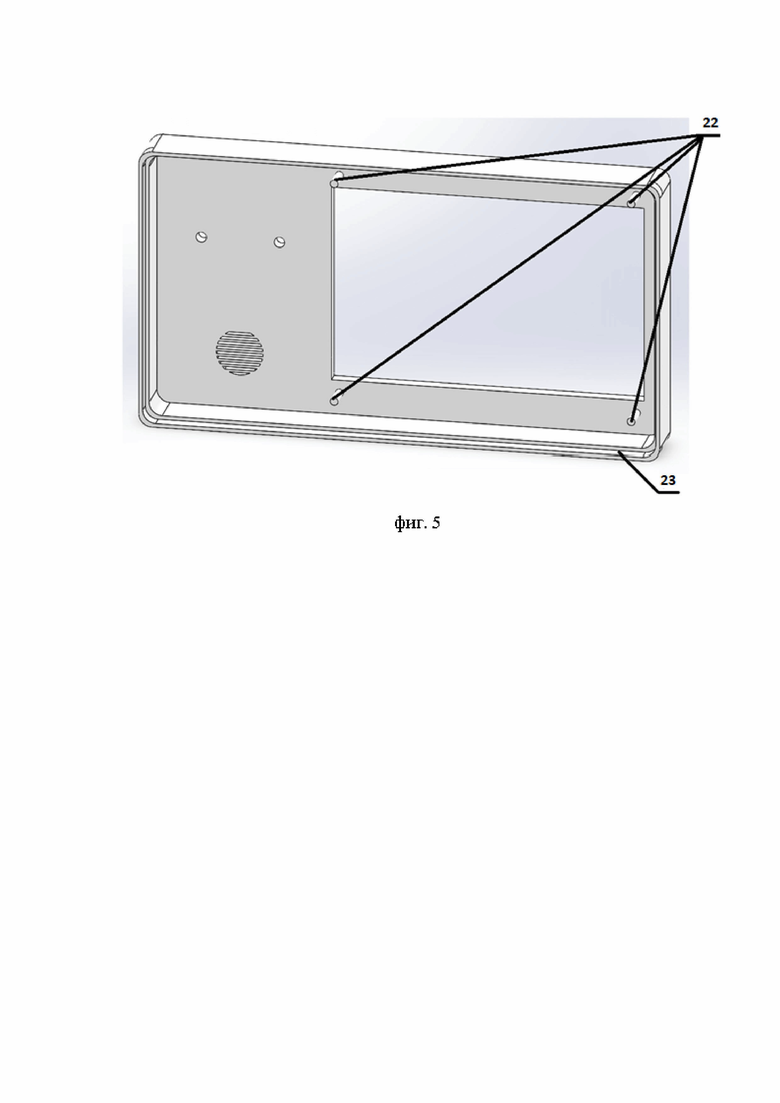
На фиг. 4 и фиг. 5 показан пластиковый корпус (17) модуля управления с отверстиями, который включает в себя переднюю (15) и заднюю (21) части, которые соединяются между собой за счет плотного соединения частей выпуклой (20) и впалой (23), на передней части (15) выполнены разъёмы для дисплея (14), двух кнопок (19) и вывода звука динамика (18), на задней части (21) выполнен разъём для заряда модуля управления (16), дисплей крепится на выпуклые пеньки (22), микрокомпьютер (не обозначен) фиксируется клеем на заднюю часть корпуса (21) с внутренней стороны.
Провода, соединяющие комплектующие, располагаются в корпусе (не обозначены), а снаружи, как показано на фиг. 1 и фиг. 4, расположены разъемы для электрического питания браслета (1) и модуля управления (16) от внешних аккумуляторов.
Разработаны алгоритмы программного обеспечения отдельно для микроконтроллера браслета и для микрокомпьютера модуля управления.
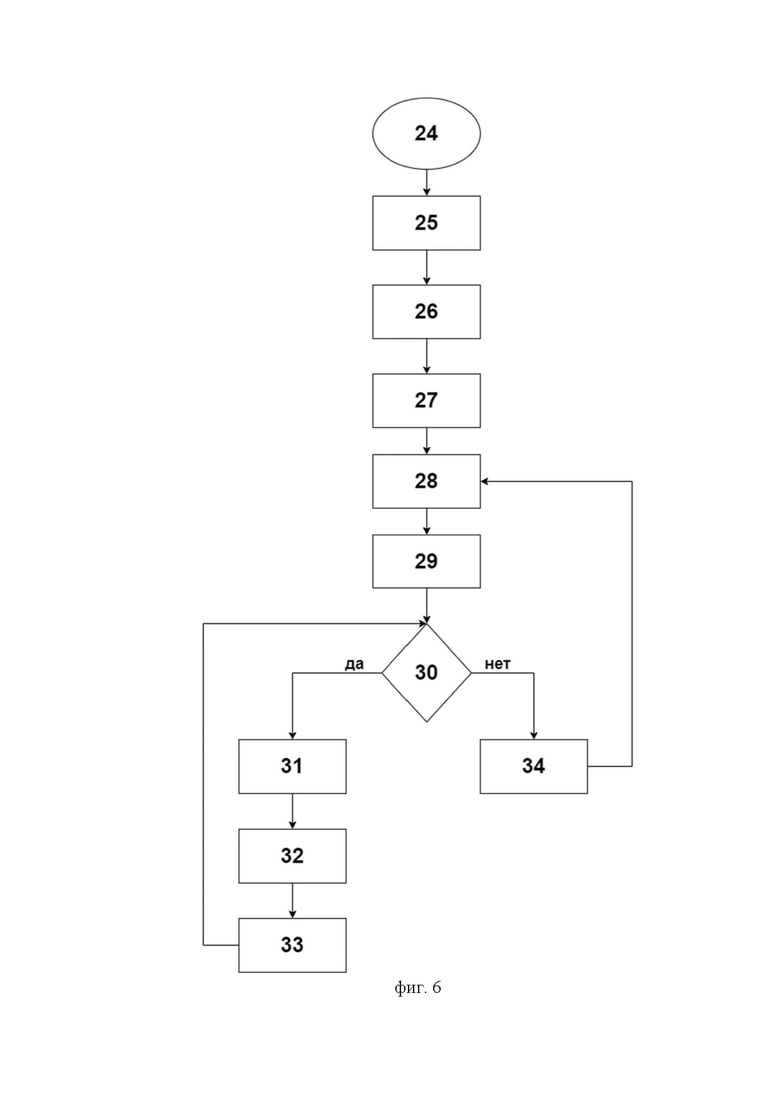
На фиг. 6 описывается алгоритм работы программного обеспечения микроконтроллера, предназначенного для сбора, обработки и передачи биоэлектрических сигналов, получаемых с датчиков электромиографии (ЭМГ). Процесс инициируется с этапа инициализации (24), где производится настройка портов ввода/вывода для связи с ЭМГ датчиками (25) и инициализация параметров Bluetooth-модуля (26), обеспечивающего беспроводную передачу данных. После входа в главный цикл работы (27), система переходит в режим ожидания подключений (28), монитора возможность установления беспроводной связи (29). При успешном подключении к внешнему устройству (30), происходит чтение и анализ сигналов ЭМГ с аналоговых входов микроконтроллера (31), преобразование их в цифровую форму, обработка и упаковка в формат, пригодный для передачи (32), затем осуществляется отправка данных через Bluetooth-модуль (33). В случае отсутствия подключения, система приводится в исходное состояние для нового цикла ожидания (34).
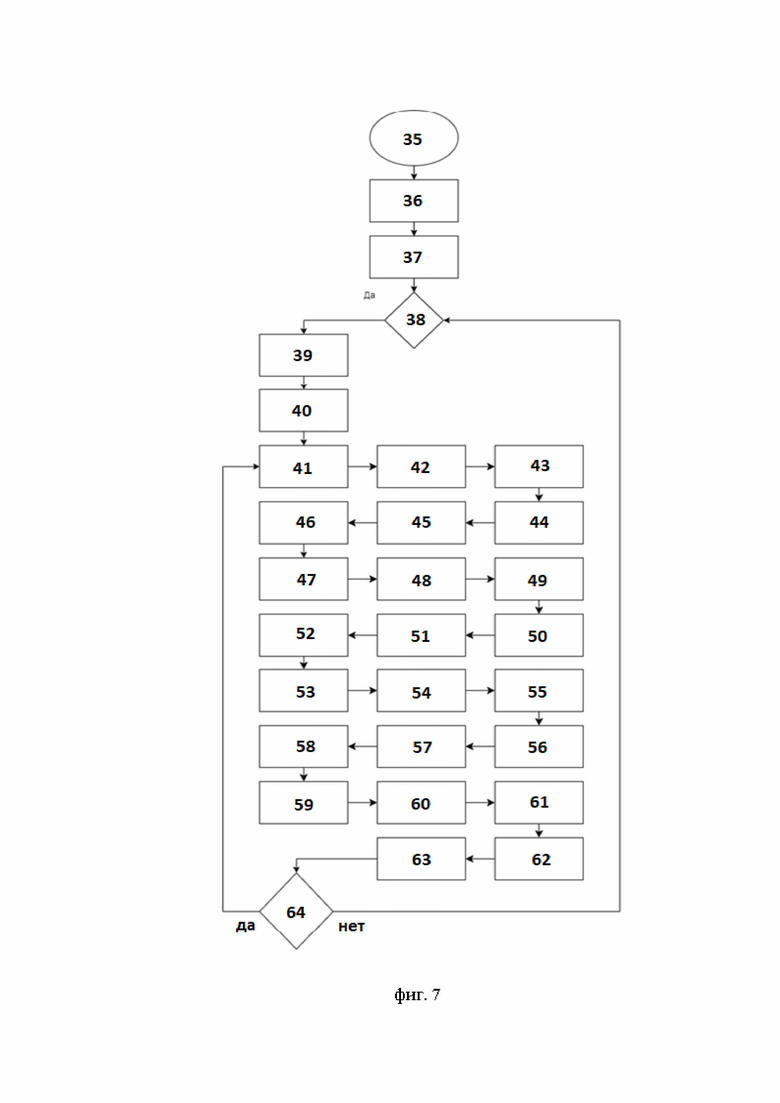
На фиг. 7 изображен алгоритм программного обеспечения для микрокомпьютера модуля управления, предназначенный для прохождения программы реабилитации тремора руки. Программа начинается с этапа инициализации (35), включающего подготовку пользовательского интерфейса и окон приложения (36), а также настройку Bluetooth-соединения (37). После запроса пользователя о начале сеанса (38), система запускает приложение (39), устанавливает связь через Bluetooth для получения данных с периферийных устройств (40), и отображает первое окно с инструкциями (41). Далее, через кнопки на модуле управления осуществляется навигация между окнами (42, 44, 46, 48, 50, 52, 54, 56, 58, 59), в которых последовательно представляются упражнения для реабилитации (47, 49, 51, 53, 55, 57), показываемые на дисплее, далее воспроизводится звуковой сигнал для дыхательных упражнений через динамик (60), через 1 минуту завершается воспроизведение звука (61). В процессе сеанса система получает и обрабатывает данные об активности мышц пользователя (43, 62), на основе которых строится график (45, 63), позволяющий оценить эффективность выполнения упражнений. По завершении цикла упражнений предлагается возможность повторить сеанс (64), возвращая пользователя к начальному этапу демонстрации инструкций (41) или запуска нового сеанса (38), что позволяет адаптировать реабилитационный процесс под индивидуальные потребности пользователя. Таким образом, данное программное обеспечение предоставляет комплексный подход к восстановлению функций руки у пациентов с тремором, используя последовательность мультимодальных упражнений и обеспечивая интерактивный контроль. Данное программное обеспечение предназначено только для реабилитации тремора руки. Программное обеспечение для микрокомпьютера может содержать в себе различные упражнения для реабилитации тремора руки, например, «Сожмите-разожмите кулак», «Прикосновение кончиком указательного пальца к подушечке большого пальца, а далее остальных пальцев», «Сгибания запястья», «Сжатие мяча для снятия стресса», «Поднятие пальцев, при лежащей ладони на столе», «Растяжка пальцев», «Восстановление дыхания и расслабление руки», а также любые другие упражнения для реабилитации тремора руки.
Браслет крепится на проксимальной части предплечья. Данное расположение удобно во время эксплуатации и позволяет во время движения пальцами фиксировать процессы возбуждения мышц, с помощью электромагнитных датчиков. Снятие результатов мышечной активности осуществляется методом поверхностной электромиографии. Так как данный метод активно используется в существующих устройствах и обеспечивает удобство и безболезненность во время использования [6].
Полученные данные обрабатываются и отображаются в виде графика электромиографии на дисплей модуля управления. Графики позволяют отслеживать динамику мышечной активности. Прием данных от браслета осуществляется модулем управления по Bluetooth. В устройстве используются специально отобранные задания для эффективной реабилитации. С помощью устройства пользователь самостоятельно сможет отслеживать прогресс/регресс реабилитации.
Массогабаритные размеры браслета составляют: вес - 315 грамм, габаритные размеры - длина 90 мм, ширина 55 мм, высота 130 мм. Изображение готового макета браслета представлено на фиг. 7.
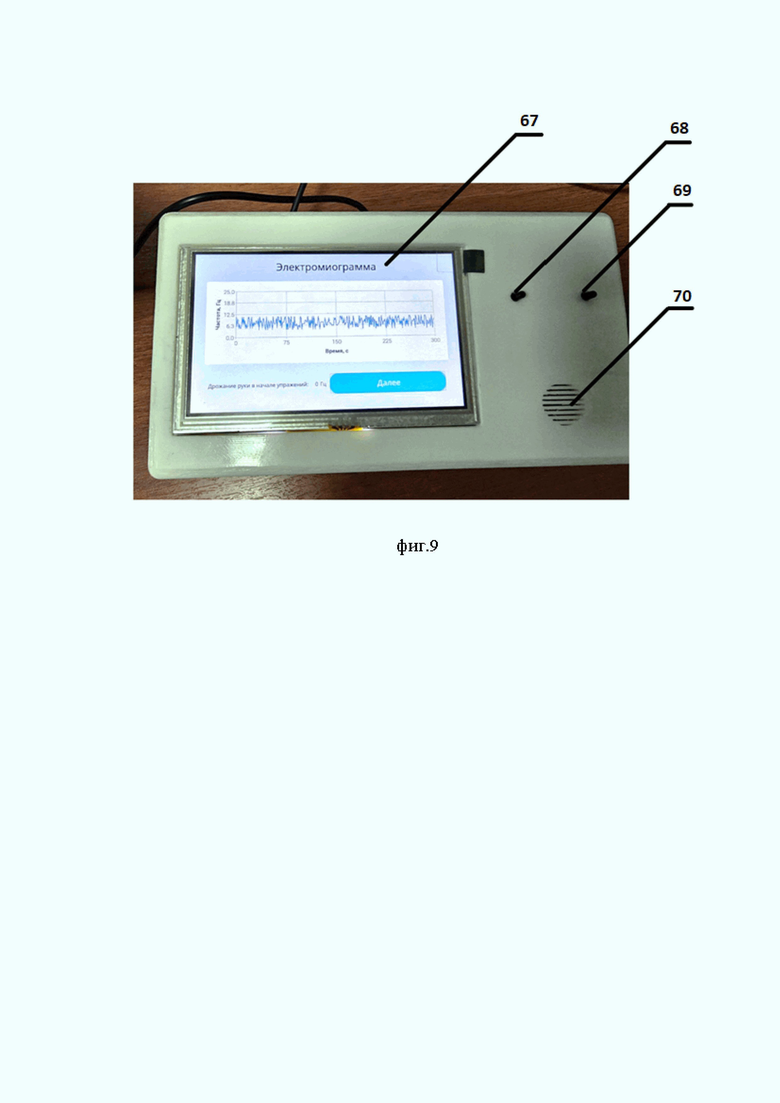
Массогабаритные размеры модуля управления составляют: вес - 570 грамм, габаритные размеры - длина 200 мм, ширина 55 мм, высота 110 мм. Изображение готового макета модуля управления представлено на фиг. 9.
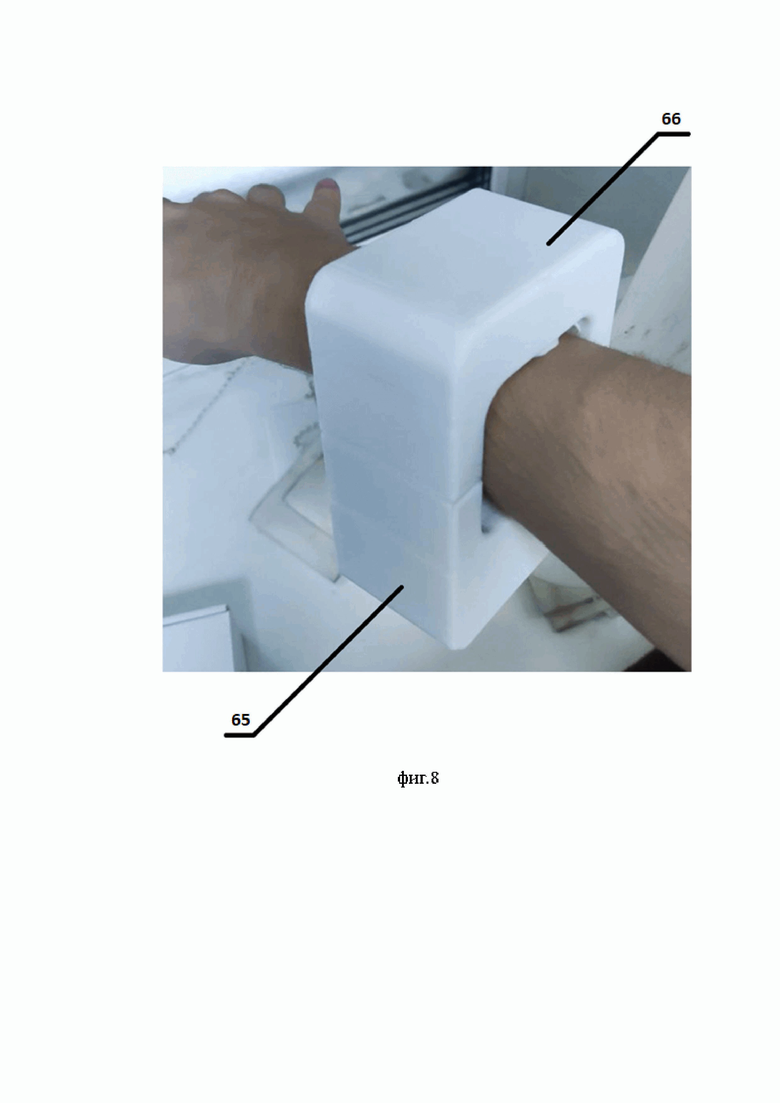
Последовательность работы пользователя с устройством представляет собой следующее, как показано на фиг. 8 и фиг. 9: пользователь с ограниченными возможностями надевает браслет на руку, соединив верхнюю (66) и нижнюю (65) части, регулируя под свою руку длину браслета, двигает пальцами руки, выполняя задания, показываемые на дисплее модуля управления (67); датчики электромиографии и плата управления датчиками обеспечивают получение данных с кожи руки, микроконтроллер с встроенным программным обеспечением осуществляет обработку, расшифровку данных, далее данные передаются с помощью Bluetooth-модуля; микрокомпьютер (принимает данные с Bluetooth-модуля; после получения обработанных данных, на дисплее модуля управления (67) строится график электромиографии; график электромиографии показывает значения частоты дрожания пальцами рук в зависимости от времени; динамик (70) выполняет функцию звукового оповещения об окончании выполнения упражнений и успешном составлении графика электромиографии на дисплее (67); кнопки (68, 69) позволяют переключаться между заданиями вперед (69) и назад (68), изображенными на дисплее (67) модуля управления.
Вес изобретения, с учетом веса браслета и модуля управления, составляет 0,885 кг, длина браслета - 90 мм.
На фиг. 10 изображено изобретение - мышечный интерпретатор, который выполнен в виде браслета и модуля управления в корпусе из пластика ABS.
Источники информации, использованные при составлении описания:
1. Tilt-браслет с распознаванием жестов // vc.ru URL: https://vc.ru/tribuna/92445-tilt-braslet-s-raspoznavaniem-zhestov (дата обращения: 01.11.2023).
2. Школьник из Екатеринбурга выиграл грант Google Science Fair // kommersant URL: https://www.kommersant.ru/doc/4047547 (дата обращения: 01.11.2023).
3. Электростимулятор периферических нервов для оценки нейромышечной функции во время наркоза НЕЙРОМИОТЕСТ-ОТВЕТ-01 // eliman URL: http://www.eliman.ru/otvet.htm (дата обращения: 01.11.2023).
4. 4-канальный многофункциональный электромиограф (электронейромиограф, миограф) «Синапсис» // colibri.group URL: https://colibri.group/product/4-канальный-многофункциональный-элек/ (дата обращения: 01.11.2023).
5. Деваев В.М. (RU), Вахитов Б.И. (RU), Вахитов И.Х. (RU), Фадеев А.Ю. (RU), Хисамутдинов Р.Э. (RU), Кашапов Н.Ф. (RU). Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы. Патент 2720323 РФ. 2020.
6. Поверхностная ЭМГ: применимость в биомеханическом анализе движений и возможности для практической реабилитации // sciencejournals URL: https://sciencejournals.ru/view-article/?j=chelfiz&y=2021&v=47&n=2&a=ChelFiz2102004Kotov (дата обращения: 20.12.2023).
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Способ функциональной диагностики биомеханики двигательных нарушений в коленном суставе человека | 2023 |
|
RU2823491C1 |
| Способ реабилитации пациентов с неврологическими нарушениями после ишемического инсульта | 2023 |
|
RU2829423C2 |
| Интерактивный тренажер для реабилитации двигательной функции руки после неврологического поражения | 2024 |
|
RU2830420C1 |
| Способ мультимодальной коррекции двигательных и когнитивных нарушений у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2813807C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ ДИАГНОСТИКИ ГИПОКИНЕЗИИ ПАЦИЕНТОВ С СИНДРОМОМ ПАРКИНСОНИЗМА И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ ТАКОГО СПОСОБА (ВАРИАНТЫ) | 2021 |
|
RU2770980C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2765237C2 |

Изобретение относится к медицине и может быть использовано в домашних и амбулаторных условиях. Предложен мышечный интерпретатор, предназначенный для людей, имеющих проблемы с моторикой верхних конечностей, с помощью специальных реабилитационных заданий. Устройство состоит из двух основных устройств, сообщающихся друг с другом посредством беспроводной Bluetooth-связи, - браслета с биоэлектрическими датчиками и модуля управления. Корпуса устройств выполнены из пластика. Для микроконтроллера браслета и микрокомпьютера модуля управления, входящих в корпуса устройств, разработаны алгоритмы программного обеспечения. Имеется дополнительная возможность регулирования длины браслета под ширину запястья человека за счет конструктивного вытягивания и фиксации боковых частей браслета. Изобретение обеспечивает повышение эффективности реабилитации тремора в домашних условиях и упрощение конструкции устройства. 10 ил.
Устройство для восстановления функций руки у пациентов с тремором, которое включает браслет и модуль управления, выполненные в виде пластиковых корпусов, браслет включает микроконтроллер с программным обеспечением, Bluetooth-модуль, плату управления датчиками и датчики электромиографии; модуль управления включает дисплей, микрокомпьютер с программным обеспечением, кнопки и динамики, при этом боковые части браслета выполнены с возможностью вытягивания и последующей фиксации нижней части в противоположных направлениях от верхней части.
| US 2021100999 A1, 08.04.2021 | |||
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| US 2009105785 A1, 23.04.2009 | |||
| US 2022160309 A1, 26.05.2022. | |||

