V
Изобретение относится к сельскохозяйственному м а Ц и построен ню, нреимуществеи- но к производству тракторов па гусеничном движителе.
Цель изобретенияповышение КПД
путем автоматизированного нод ье.ма н опускания наг1равляюн1их колес.
На чертеже дана схема гусеничного трактора.
Гусеничный трактор содержит раму I с гусеничным движителем 2 и устройство для сцепления с сельхозагрегатом 3, установленным на опорное колесо 4. Гусеничный движитель включает в себя ведущее колесо 5 и направляющие колеса 6, снабженные механизмом их подъема и опускания, который состоит из гидроцилиндра 7. имеющего полости А и Б, соединенные с гидронасосом 8 через трехпозиционный распределитель 9 с электромагнитами 10 управления.
На ведущее колесо 5 движителя н опорное колесо 4 сельхозагрегата устанавлива- ются датчики 11 и 12 частоты вращения сигна лы от которых подаются на делитель 13, выход которого соединен с входом блока 14 сравнения, выполненного, нанри- мер, в виде двух компараторов 15 и 16, пороговые уровни которых представляют со бой напряжения Um, эквивалентное верхнему, и t/Mo - нижнему приделам изменения буксования движителя. Выход блока сравнения через задатчик 17 режима работы, снабженный переключателе. 18, соединен с усилителями 19 мощности, сигнал от кото- рых подается па электромагниты трехпо- зициопного распределителя 9.
Гусеничный трактор работает следующим образом.
Переключателем 18 могут задаваться три режима работы: автоматический, нринуди- тельный подъем и принудительное опускание направляющих колес.
При работе гусеничного трактора в автоматическом режиме (подвижные элементы задатчика 18 режима работы находятся в крайнем левом положении) сигпалы, по- стунающие от датчиков 11 и 12 оборотов подаются па делитель 13 и от него на блок 14 сравнения. Если подаваемый сигнал, эквивалентный текущему буксованию движителей, меньще нижнего порогового уровня i/m. компаратора 16, то па его выходе получается сигнал логической «1, который через усилитель мощности воздействует на левый электромагнит 10 распределителя 9. При этом на выходе ко.м- паратора 15 получается сигнал логического «О. В данном случае золотник распределителя 9, притягиваясь левым электромагнитом 10, смещается влево и открывает подвод масла от насоса 8 в полость Б гид- роцилиндра 7, обеспечивая подъем направ- ляющих колес движителя. Это происходит до тех пор, пока сигнал от делителя 13 не становится несколько больще порогового уровня Um компаратора 16, или не
25
Ш
20
40 45 г
нросходит максимальный подъем колес. При создании .избыточного давления масла оно пойдет через предохранительный клапан на слив.
Ес:1и ве, 1ичина си1 на: а, поступающего от делителя, находится is диапазоне нижнего (/пг и верхнего (Ущ пороговых уровней 1,1и )авна им, то па выходах обоих компараторов присутствуют сигна: ы логическо- -о «О, что обеспечивает нейтральное ноло- жепие золотника расиределителя 9. Это соответствует блоки ровке ги дроцил и ндров механизма нодъема и опускания направляющих колес и характеризует работу агрегата в зоне нечувствительности системы.
Ес. 1и ве;|ичина сигна:1а, поступаюн1.его от делителя, становится больн е верхнего порогового уровня (Уп, компаратора 15, то па его выходе получается сигнал логической «1, что обеспечивает подачу э:1ектрического сигпа.ча на правьп1 электромагнит 10 и неревод в правое крайнее по;1оже1П1е золотника. .Мас. ю от насоса 8 поступает в полость .4 гидронилиндра 7, обеснечивая опускание направляющих колес на почву. Процесс опускания происходит до тех пор, пока сигнал, постунаюнлий от де.;1ите. 1Я, не стано ится несколько мень- 1ПИМ ве.чичины L/m или пока не произойдет но, 1ное онускапие нанравляюнхих Ko. iec на почву.
В режиме ()аботы «принудительное опускание колес подвижные э.чементы задатчика 18 режима работы находятся в среднем положении. Это обеспечивает подключение левого усилителя 19 .МОПАПОСТИ к «земле, а правого уси,г1ителя 19 к источнику напряжения, что в конечном итоге приводит к воздействию на правый электромагнит 10 распределителя 9 и перевод его золотника в крайнее правое гюложепие. При этом полость А гидроцилиндра 7 соединяется с насосом 18, а полость Б со сливом, что обеспечивает опускание колес.
В режиме работы «Принудительный нодъ- е.м колес подвижные элемепты задатчика 18 режима работы находятся в крайнем правом положении, что в конечном итоге .приводит к воздействию на левый электромагнит распределителя 9 и соединение полости А гидроцилиндра 7 со сливом, а полости 5 - с насосом, т. е. опускание колес.
Формула изобретения
Гусеничный трактор, преимущественно для сельскохозяйственных работ, содержа- пдий раму с гусеничным движителем, с ведущими и направляющи.ми колесами, связанный с механизмом их подъема и опускания, и устройство для сцепления с сельскохозяйственной мащиной с опорным колесом, причем механиз.м подъема и опускания включает в себя четырехлинейный трехпозиционный гидрораспределитель и гид1324918
34
равлический цилиндр, рабочие полости кото-вход которого соединен с выходом дели- рого связаны трубопроводами с входамителя, задатчиком режима работы, вход ко- гидрораспределителя, отличающийся тем,торого соединен с выходом блока срав- что с целью повышения КПД путем обес-нения, усилителями мощности, входы кото- печения оптимальной площади опорнойрых соединены с задатчиком режима ра- поверхности гусеничного движителя, он снаб- боты, а гидрораспределитель выполнен элек- жен датчиками частоты вращения, уста-ктроуправляемым с электромагнитами, кото- новленными на ведущем колесе движителярые соединены с выходами усилителей мощ- и опорном колесе сельскохозяйственного аг-ности, причем в нейтральной позиции гид- регата, делителем, соединенным входами срораспределителя рабочие полости гидроуказанными датчиками, блоком сравненияцилиндра разобщены.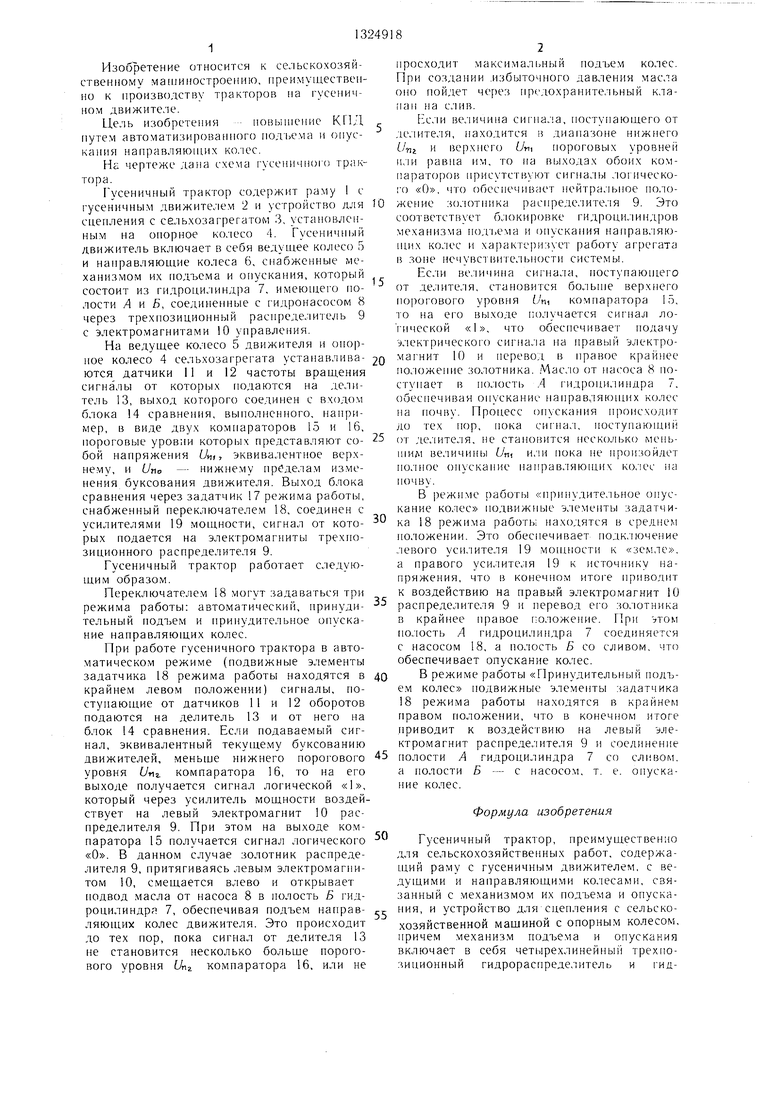
| название | год | авторы | номер документа |
|---|---|---|---|
| Гусеничный трактор | 1987 |
|
SU1446017A2 |
| Система управления блокировкой дифференциала колесного транспортного средства | 1987 |
|
SU1414667A1 |
| Система управления блокировкой дифференциала колесного транспортного средства | 1985 |
|
SU1298102A1 |
| Устройство для повышения проходимости транспортного средства | 1986 |
|
SU1335489A1 |
| Гидрообъемное рулевое управление с механизмом блокировки дифференциала | 1987 |
|
SU1414668A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2049690C1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ | 1989 |
|
SU1829271A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2605802C2 |
| Гидропривод грузовой лебедки | 1985 |
|
SU1268506A1 |
| Система поворота шарнирно сочлененных гусеничных тракторов | 1987 |
|
SU1495191A1 |
И.чобретеяие относится к сельскохозяйственному машиностроению. Цель - новы- HiCHHe КПД 1-усеничного трактора. Гусеничный трактор содержит раму 1 с гусеничным .1е.м 2 и устройство для сцепления с гельхо: агрегатом 3, установленным ил опорном колесе 4. Направляющие колеса 6 гусеничного движителя снабжены механизмом их подъема и опускания, а на ведунхее колесо 5 движителя и опорное колесо 4 сельхозагрегата установлены датчики частоты вранхения 11 и 12. Сигнал от датчиков через делитель 13, блок сравнения 14, задатчик режима работы 17, усилители монхности 19 подается на электромагниты 10 управления трехпозицион- ным распределителем 9, который включен в гидравлическую схему механизма подъема и опускания направляющих колес 6. Такое устройство обеспечивает работу механизма подъема и опускания направляющих колес в автоматическом и принудительном режимах. Режим работы задается переключателем 18, установленным на задатчике режима работы 17. 1 ил. Ф (Л оо 1Ч5 4 СО 00
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| кл | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
