Область техники
Настоящее изобретение относится к области спутников, в частности к удержанию спутников на орбите.
Уровень техники
Геостационарный спутник представляет собой спутник, движущийся по орбите вокруг Земли и следующий по направлению вращения Земли.
Один оборот геостационарного спутника вокруг Земли занимает примерно 24 часа, что равно количеству времени, за которое Земля совершает один оборот вокруг своей оси. Данные виды спутников считаются геостационарными, поскольку они кажутся неподвижными при наблюдении из конкретного места на Земле, и обычно используются в качестве спутников связи.
Геостационарные спутники имеют заданные орбиты над экватором Земли, так что они не сталкиваются друг с другом и не создают помех связи друг друга. Геостационарные спутники движутся по орбите с радиусом примерно 42164 километра от центра Земли. Спутники при таком радиусе делают один оборот вокруг Земли примерно за 24 часа (звездные сутки) под воздействием силы тяготения Земли. Орбита спутника может подвергаться возмущающим влияниям, таким как силы тяготения от Солнца и Луны, некруговая форма Земли, давление солнечного излучения и т. д. Для преодоления возмущающих влияний и удержания спутника на заданной орбите системы движения на спутнике 30 выполняют активные маневры, которые также называют маневрами для «удержания на орбите». При наблюдении из местоположения на Земле положение спутника поддерживают в пределах установленной орбитальной станции или «поста», имеющего заданные размеры.
Удержание на орбите включает в себя управление долготой спутника, эксцентриситетом его орбиты, и наклонением его орбитальной плоскости от экваториальной плоскости Земли.
Пример удержания на орбите описан в патенте США № 6 015 116, выданном 18 января 2000 г. Система движения, описанная в патенте 6 015 116, использует четыре двигателя малой тяги, которые расположены по диагонали на задней стороне (зенита) спутника. Одна пара двигателей малой тяги имеет линию тяги, направленную через центр 10 масс спутника, а другая пара имеет силы двигателя малой тяги, отделенные плечом момента от центра масс. Другой пример удержания на орбите описан в патенте США № 7 918 420, выданном 05 апреля 2011 г.
Оба патента включены в настоящий документ посредством ссылки в полном объеме.
Необходимо установить новые и улучшенные маневры для удержания на орбите, которые являются эффективными и экономящими топливо.
Раскрытие изобретения
Описанные в настоящем документе варианты осуществления обеспечивают маневры для удержания спутника на орбите. Спутник, описанный в настоящем документе, содержит спутниковую платформу, имеющую сторону надира, обращенную к Земле, и сторону зенита, противоположную стороне надира. Северный электрический двигатель малой тяги установлен в направлении северной области стороны зенита и ориентирован для создания тяги через центр масс спутника. Южный электрический двигатель малой тяги установлен в направлении южной области стороны зенита и ориентирован для создания тяги через центр масс спутника. Устройство управления орбитой управляет маневрами для удержания спутника на орбите. Устройство управления орбитой выполнено с возможностью выбора длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла. Разность между длительностями импульсов включения создает изменение эксцентриситета, по существу, вдоль оси x геоцентрической системы координат. Устройство управления орбитой выполнено с возможностью выбора смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла. Разность между смещениями импульсов включения создает изменение эксцентриситета, по существу, вдоль оси y геоцентрической системы координат. Вследствие разностей в импульсах включения в восходящем и нисходящем узлах за счет указанных маневров может быть получено изменение целевого вектора эксцентриситета (Δe). Таким образом, целевое Δe может быть изменено для компенсации вектора эксцентриситета, вызванного давлением солнечного излучения и другими возмущающими влияниями.
В одном варианте осуществления спутник, кроме того, содержит восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника, и западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника.
В другом варианте осуществления устройство управления орбитой выполнено с возможностью управления импульсом включения одного из западного химического двигателя малой тяги или импульсом включения восточного двигателя малой тяги вблизи восходящего узла, и для управления импульсом включения другого одного из западного химического двигателя малой тяги или импульсом включения восточного химического двигателя малой тяги вблизи нисходящего узла. Импульс (импульсы) включения химических двигателей малой тяги создает дополнительную векторную составляющую Δe.
В другом варианте осуществления разность в длительностях импульсов 5 включения для электрических двигателей малой тяги и разность в смещениях импульсов включения электрических двигателей малой тяги создает суммарное изменение радиальной скорости спутника, при этом суммарное изменение радиальной скорости создает составляющую вектора дельта-эксцентриситета для орбиты спутника вследствие импульсов включения электрических двигателей малой тяги. Устройство управления орбитой выполнено с возможностью управления импульсом включения одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги в первом месте, расположенном вдоль орбиты спутника, что создает первое 15 тангенциальное изменение скорости спутника, при этом первое тангенциальное изменение скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги. Устройство управления орбитой выполнено с возможностью выбора первого местоположения импульса включения одного химического двигателя малой тяги, так, чтобы составляющая дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги.
В другом варианте осуществления устройство управления орбитой выполнено с возможностью управления импульсом включения другого одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги во втором месте, расположенном вдоль орбиты спутника, что создает второе тангенциальное изменение скорости спутника, при этом второе тангенциальное изменение скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги. Устройство управления орбитой выполнено с возможностью выбора второго местоположения импульса включения другого химического двигателя малой тяги, так, чтобы составляющая вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги и составляющей дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги.
В другом варианте осуществления устройство управления орбитой выполнено с возможностью определения наклонения орбитальной плоскости спутника и определения полного времени импульсов включения для импульса включения северного электрического двигателя малой тяги и импульса включения южного двигателя малой тяги на основе наклонения.
В другом варианте осуществления устройство управления орбитой выполнено с возможностью определения положения Солнца в геоцентрической системе координат на основе времени года и выбора длительности и смещения импульса включения северного электрического двигателя малой тяги, и длительности и смещения импульса включения южного электрического двигателя малой тяги для получения целевого изменения эксцентриситета, который направлен за положение Солнца на 90º ± 5°.
В другом варианте осуществления северный электрический двигатель малой тяги ориентирован под первым углом к оси север-юг спутника, причем первый угол составляет 35° ± 25°. Южный электрический двигатель малой тяги ориентирован под вторым углом к оси север-юг спутника, причем второй угол составляет 35° ± 25°.
В другом варианте осуществления северный электрический двигатель малой тяги и южный электрический двигатель малой тяги используют ксенон в качестве топлива.
Другой вариант осуществления включает в себя способ управления маневрами для удержания спутника на орбите, как описано выше. Способ включает в себя выбор длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла. Орбитальное устройство управления выполнено с возможностью выбора смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла.
Другой вариант осуществления включает в себя устройство управления орбитой, выполненное с возможностью управления маневрами для удержания спутника на орбите, как описано выше.
Устройство управления орбитой выполнено с возможностью выбора длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла. Устройство управления орбитой выполнено с возможностью выбора смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла.
Описанные признаки, функции и преимущества могут быть остигнуты независимо в различных вариантах осуществления или могут быть объединены в других вариантах осуществления, дополнительные детали которых можно рассматривать со ссылками на следующее описание и чертежи.
Краткое описание чертежей
Теперь будут описаны некоторые варианты осуществления настоящего изобретения, только в качестве примера, со ссылками на прилагаемые чертежи. Одинаковым ссылочным номером обозначен один элемент или такой же тип элемента на всех чертежах.
В примере варианта осуществления на фиг. 1 представлен спутник.
В примере варианта осуществления на фиг. 2 представлена сторона зенита спутниковой платформы.
В примере варианта осуществления на фиг. 3 представлен вид сбоку спутниковой платформы.
В примере варианта осуществления на фиг. 4 представлена орбита спутника.
В примере варианта осуществления на фиг. 5 представлены векторы скорости, полученные в результате импульсов включения двигателя малой тяги.
На фиг. 6 представлен эксцентриситет орбиты спутника.
На фиг. 7 представлен эксцентриситет, вызванный давлением солнечного излучения.
В примере варианта осуществления на фиг. 8 представлена разность в длительностях импульсов включения вблизи восходящего узла и нисходящего узла.
В примере варианта осуществления на фиг. 9 приведено смещение импульса включения вблизи восходящего узла и смещение импульса включения вблизи нисходящего узла.
В примере варианта осуществления на фиг. 10 приведено целевое Δe, полученное вследствие маневров для удержания на орбите.
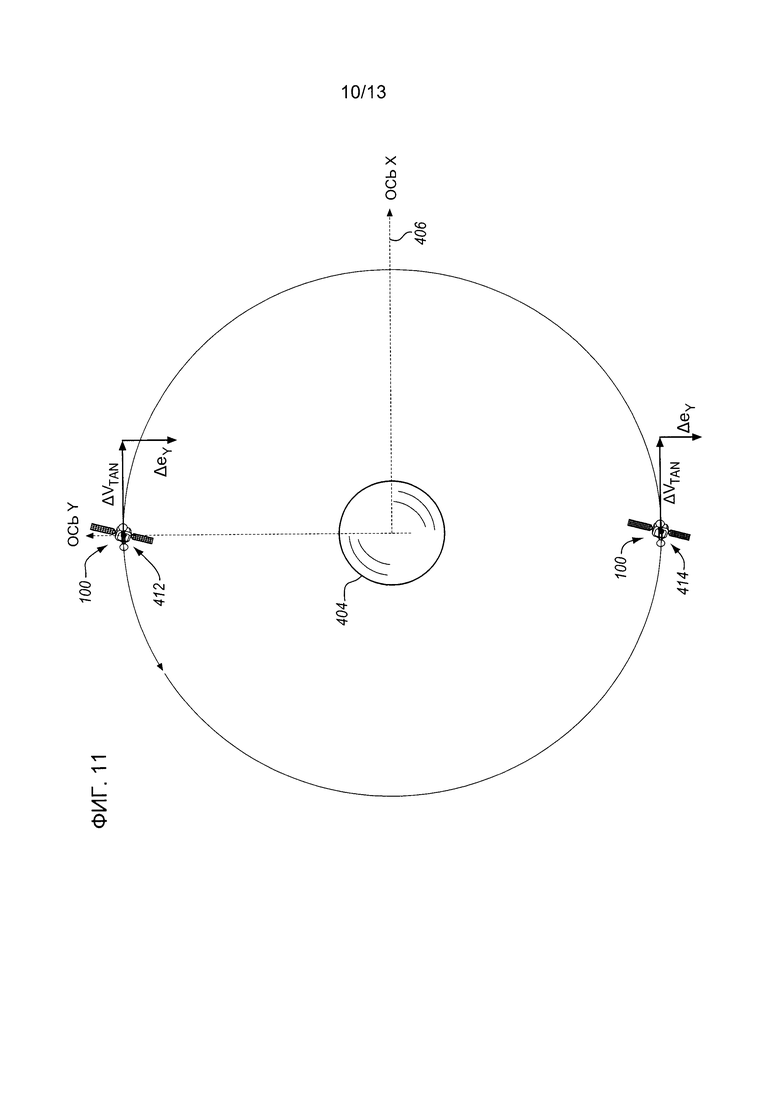
В примере варианта осуществления на фиг. 11 представлен импульс включения химического двигателя малой тяги вблизи восходящего узла и/или нисходящего узла.
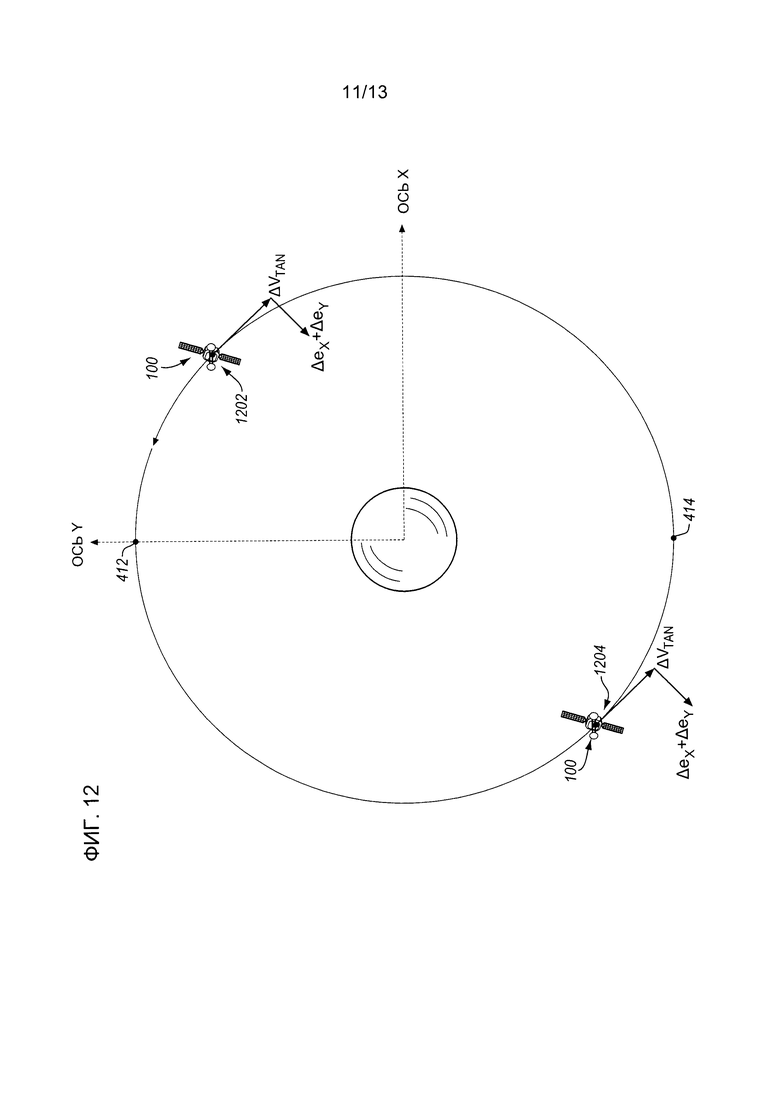
В примере варианта осуществления на фиг. 12 приведен импульс включения химического двигателя малой тяги в местоположениях вдоль орбиты спутника.
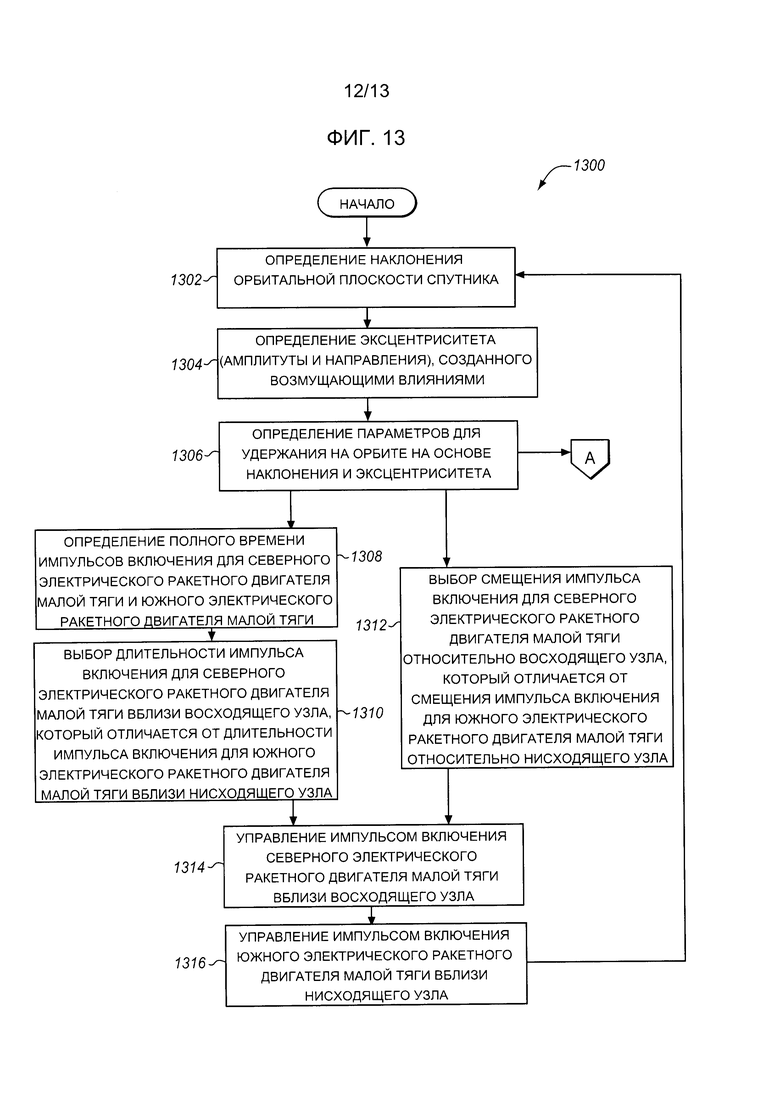
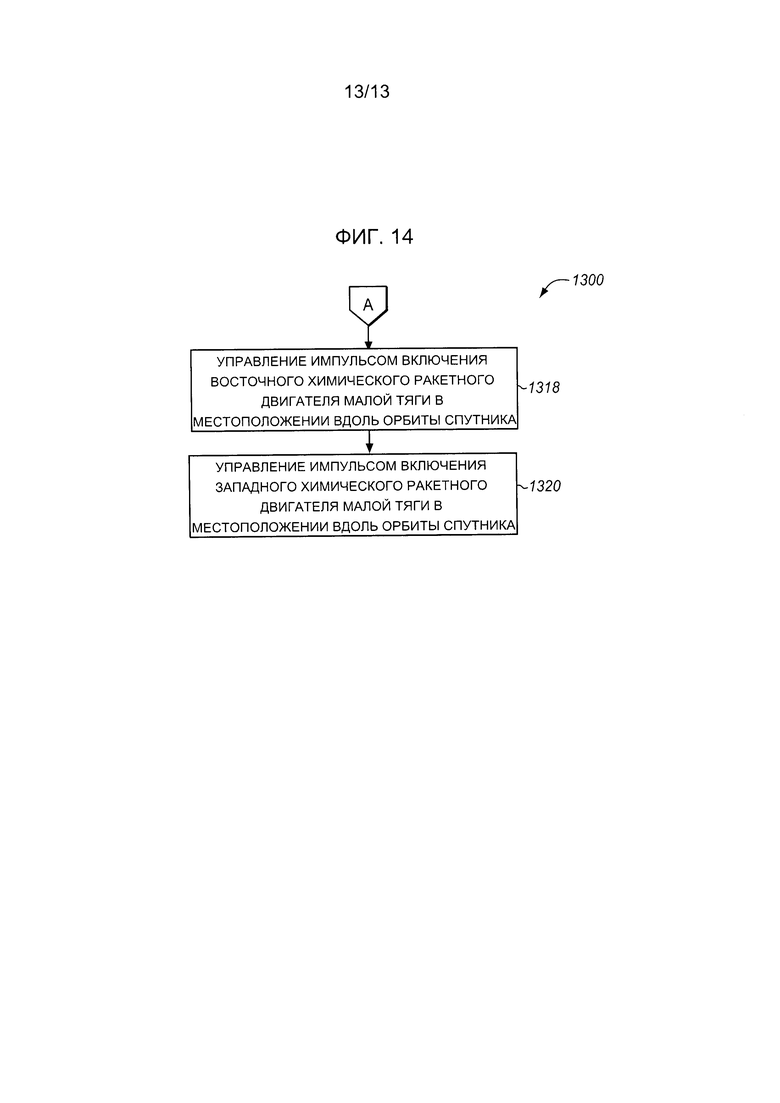
В примере варианта осуществления на фиг. 13-14 приведены блок-схемы, иллюстрирующие способ управления маневрами для удержания спутника на орбите.
Осуществление изобретения
Чертежи и следующее описание иллюстрируют конкретные примеры вариантов осуществления. Следует иметь в виду, что специалисты в данной области техники смогут разрабатывать различные механизмы, которые, хотя и не описаны в явном виде в данном описании или не показаны здесь, воплощают описанные в настоящем документе принципы и включены в предполагаемый объем формулы изобретения, которая приведена после настоящего описания. Кроме того, какие-либо примеры, описанные в настоящем документе, предназначены для понимания принципов изобретения и должны рассматриваться как не имеющие ограничительного характера. В результате настоящее изобретение ограничено не конкретными вариантами осуществления или описанными ниже примерами, а только формулой изобретения и ее эквивалентами.
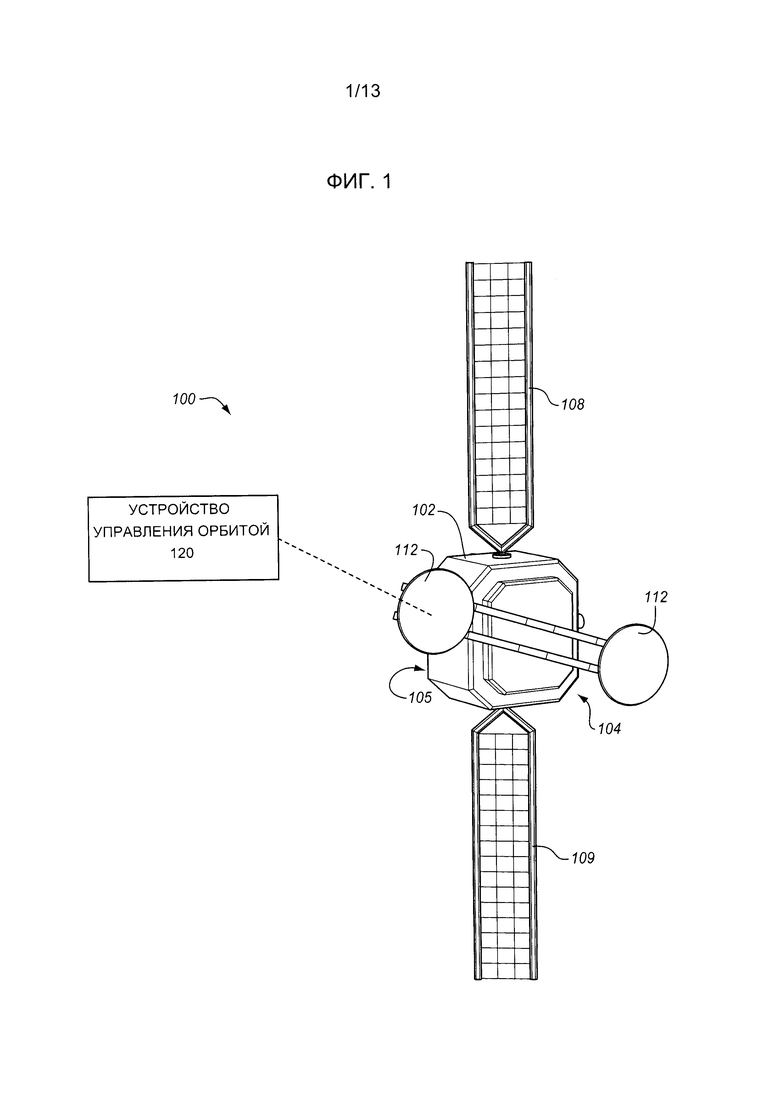
В примере варианта осуществления на фиг. 1 представлен спутник 100. Спутник 100 содержит главный корпус, несущий полезную нагрузку спутника, который называется спутниковой платформой 102. При наблюдении с Земли спутниковая платформа 102 включает в себя сторону 104 надира (или переднюю сторону) и противоположную сторону 105 зенита (или заднюю сторону). Термины «сторона» или «поверхность» могут быть использованы взаимозаменяемо при описании спутниковой платформы 102. Спутник 100 также содержит крылья 108-109 солнечных батарей, прикрепленные к спутниковой платформе 102, которые могут быть использованы для получения электроэнергии от Солнца для питания различных компонентов на спутнике 100. Спутник 100 также содержит одну или больше антенн 112, которые могут быть использованы для связи.
Конструкция спутника 100, показанная на фиг. 1, является примером и, при необходимости, может изменяться.
Спутник 100 выполнен с возможностью вращения вокруг Земли, например, по геостационарной орбите. Чтобы удерживать спутник 100 на заданной орбите, со спутником 100 соединено устройство 120 управления орбитой. Устройство 120 управления орбитой содержит устройства, компоненты или модули (включая аппаратуру, программное обеспечение или сочетание аппаратуры и программного обеспечения), которые управляют маневрами для удержания спутника 100 на орбите. Устройство 120 управления орбитой может быть расположено на Земле, и имеет возможность связи со спутником 100 посредством беспроводных сигналов.
Устройство 120 управления орбитой в качестве альтернативы может быть расположено на спутнике 100. Устройство 120 управления орбитой также может быть собрано из блоков, с частью устройства 120 управления орбитой, расположенной на Земле, и частью, расположенной локально на спутнике 100.
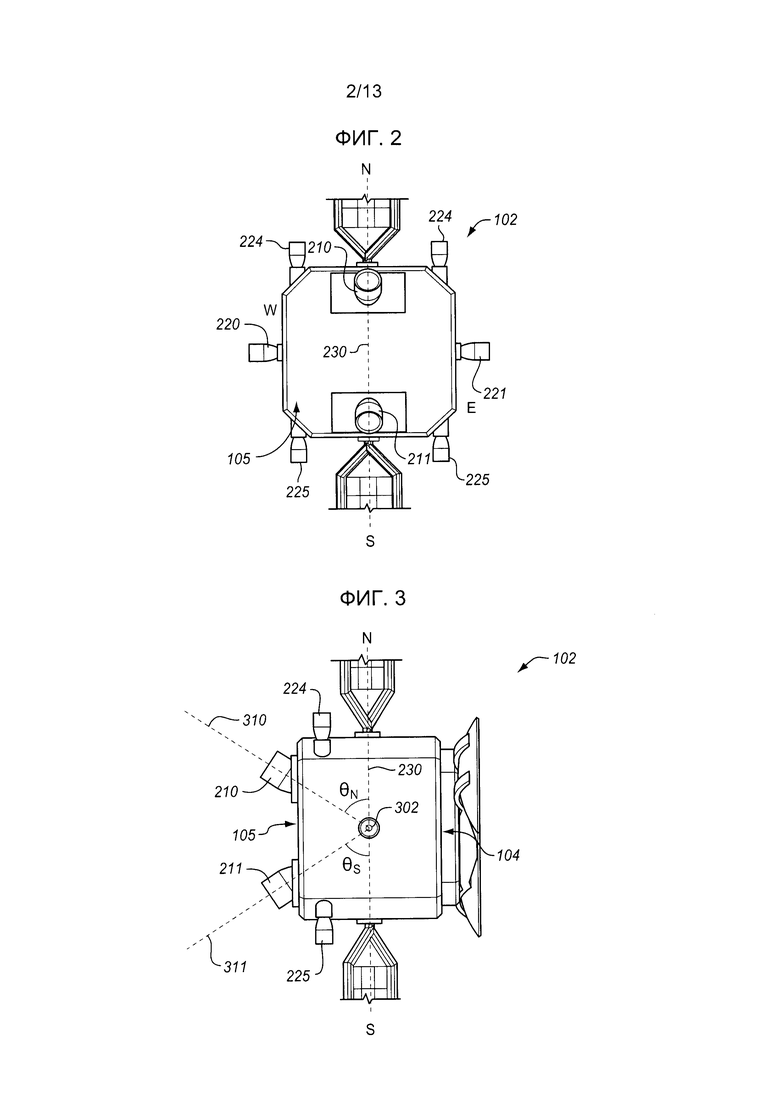
Спутник 100 содержит систему движения, которую используют для маневров для удержания на орбите. В примере варианта осуществления на фиг. 2 представлена сторона 105 зенита спутниковой платформы 102.
Верхнюю сторону спутниковой платформы 102 называют северной стороной (обозначенной «N»), а нижнюю сторону спутниковой платформы 102 называют южной стороной (обозначенной «S»). Левую сторону спутниковой платформы 102 на фиг. 2 называют западной стороной (обозначенной «W»), а правую сторону спутниковой платформы 102 на
фиг. 2 называют восточной стороной (обозначенной «E»). Сторона 105 зенита спутниковой платформы 102 содержит пару электрических двигателей 210-211 малой тяги, которые являются частью системы движения. Электрический двигатель малой тяги является типом двигателя малой тяги, который создает электрическое тяги за счет ускоренных ионов.
В типичном электрическом двигателе малой тяги ракетное топливо (например, ксенон) инжектируют в ионизационную камеру и ионизируют посредством бомбардировки электронами. Затем ионы ускоряются за счет электромагнитного поля, и эмитируются из двигателя малой тяги в качестве выхлопа, создающего тяги. Одним из примеров электрического двигателя малой тяги является движительная установка на ионах ксенона (Xenon Ion Propulsion System, XIPS©) изготавливаемая компанией L-3 Communications, Аврора, штат Колорадо.
Электрический двигатель 210 малой тяги установлен в направлении северной области стороны 105 зенита, и в настоящем документе называется северным электрическим двигателем малой тяги.
Электрический двигатель 211 малой тяги установлен в направлении южной области стороны 105 зенита, и в настоящем документе называется южным электрическим двигателем малой тяги. В данном варианте осуществления северный электрический двигатель 210 малой тяги и южный электрический двигатель 211 малой тяги установлены по центру на стороне 105 зенита вдоль оси 230 север-юг спутниковой платформы 102. В других вариантах осуществления северный электрический двигатель 210 малой тяги и южный электрический двигатель 211 малой тяги могут быть установлены со смещением от центра.
В примере варианта осуществления на фиг. 3 представлен вид сбоку спутниковой платформы 102. Северный электрический двигатель 210 малой тяги ориентирован или наклонен вниз для получения тяги через центр 302 масс спутника 100. Линия 310 представляет линию тяги северного электрического двигателя 210 малой тяги, проходящую через центр 302 масс. Ориентация северного электрического двигателя 210 малой тяги образует угол наклона θN между линией 310 тяги и осью 230 север-юг спутниковой платформы 102. Угол наклона θN может составлять 35° ± 25°. Северный электрический двигатель 210 малой тяги может быть закреплен под необходимым углом, или может быть установлен в карданном подвесе, чтобы устройство 120 управления орбитой могло регулировать угол наклона θN северного электрического двигателя 210 малой тяги, при необходимости. Благодаря ориентации северного электрического двигателя 210 малой тяги, существует возможность создавать тягу в южном направлении (вниз на фиг. 3) и радиально в направлении Земли.
Южный электрический двигатель 211 малой тяги ориентирован или наклонен вверх для получения тяги через центр 302 масс спутника 100.
Линия 311 представляет линию тяги южного электрического двигателя 211 малой тяги, проходящую через центр 302 масс. Ориентация южного электрического двигателя 211 малой тяги образует угол наклона θS между линией 311 тяги и осью 230 север-юг спутниковой платформы 102. Угол наклона θS может составлять 35° ± 25°. Южный электрический двигатель 211 малой тяги может быть закреплен под необходимым углом, или может быть установлен в карданном подвесе, чтобы устройство 120 управления орбитой могло регулировать угол наклона θS южного электрического двигателя 211 малой тяги, при необходимости. Благодаря ориентации южного электрического двигателя 211 малой тяги, существует возможность создавать тягу в северном направлении (вверх на фиг. 3), и радиально в направлении Земли.
Число или положения электрических двигателей 210-211 малой тяги, как показано на фиг. 2-3, обеспечивает примерную конфигурацию.
Описанные в настоящем документе маневры для удержания на орбите применяют к любой конфигурации, в которой электрические ракетные двигатели малой тяги создают изменение скорости вне плоскости орбиты (или нормальное изменение скорости) и радиальное изменение скорости.
На фиг. 2 химический двигатель 220 малой тяги установлен на западной стороне спутниковой платформы 102, а химический двигатель 221 малой тяги установлен на восточной стороне спутниковой платформы 102. Химический двигатель малой тяги представляет собой двигатель малой тяги, который сжигает жидкое ракетное топливо для получения тяги. Один из типов химического двигателя малой тяги называется двигателем малой тяги, работающим на двухкомпонентном ракетном топливе (или двухкомпонентном РТ), который сжигает жидкое топливо и жидкий окислитель в камере сгорания. Химический двигатель 220 малой тяги может быть установлен по центру на западной стороне спутниковой платформы 102 для получения тяги через центр 302 масс спутника 100 (см. фиг. 3). Точно так же, химический двигатель 221 малой тяги может быть установлен по центру на восточной стороне спутниковой платформы 102 для получения тяги через центр 302 масс спутника 100.
В одном варианте осуществления химические ракетные двигатели 224 малой тяги могут быть установлены на северной стороне спутниковой платформы 102, и химические ракетные двигатели 225 малой тяги могут быть установлены на южной стороне спутниковой платформы 102.
Северный и южный химические ракетные двигатели 224-225 малой тяги являются дополнительными. Если установлены северный и южный химические ракетные двигатели 224-225 малой тяги, их местоположение может изменяться в зависимости от антенн, панелей солнечных батарей и другой полезной нагрузки, прикрепленной к северной и южной сторонам спутниковой платформы 102.
Система движения спутника 100 может содержать другие ракетные двигатели малой тяги, не показанные на фиг. 2-3. Например, резервный электрический двигатель малой тяги может быть установлен в северной области стороны 105 зенита на случай отказов северного двигателя 210 малой тяги. Аналогично, резервный электрический двигатель малой тяги может быть установлен в южной области стороны 105 зенита на случай отказов южного двигателя 211 малой тяги. Дополнительные химические ракетные двигатели малой тяги также могут быть установлены на стороне 105 зенита, и любом сочетании северной, южной, восточной и западной сторон. Поскольку ракетные двигатели малой тяги и ракетное топливо дорогие, возможно будет желательно уменьшить число двигателей малой тяги, используемых для маневров для удержания на орбите, и уменьшить число маневров, выполняемых в ходе удержания на орбите.
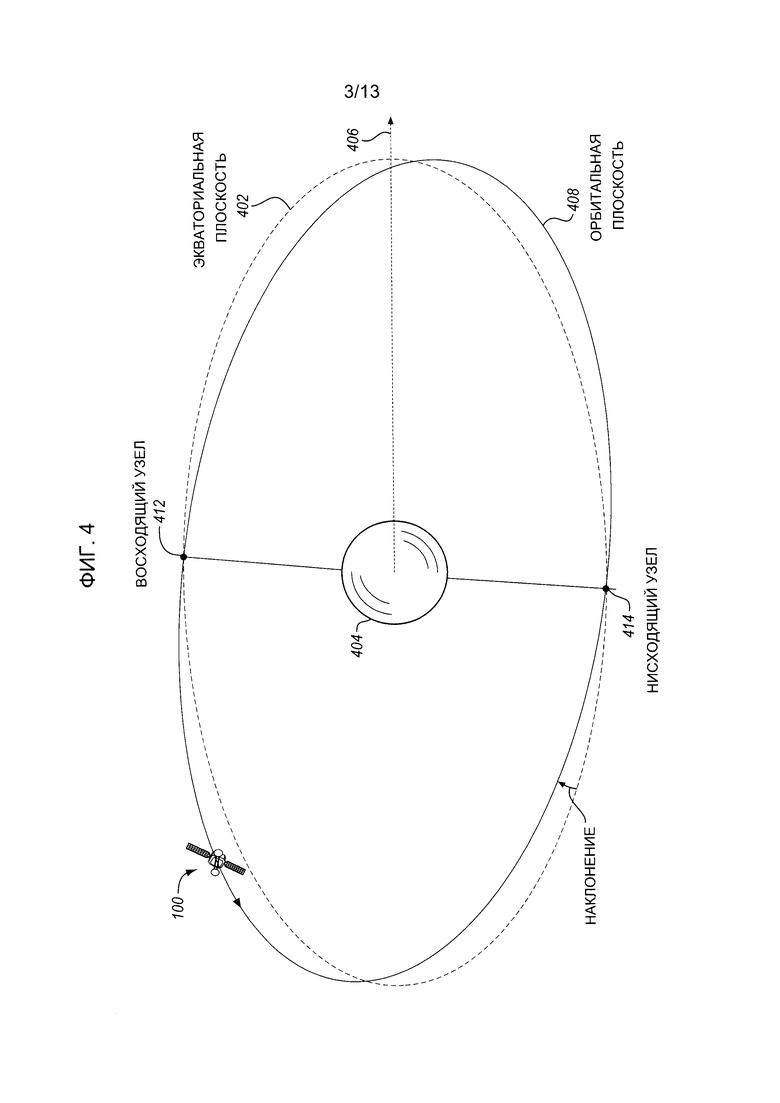
В примере варианта осуществления на фиг. 4 представлена орбита спутника 100. Пунктирный эллипс представляет экваториальную плоскость 402 Земли 404, которая является плоскостью, проходящей через экватор Земли 404. Пунктирная стрелка представляет первую точку весеннего равноденствия 406, в которой экваториальная плоскость проходит через центр Солнца. Сплошной эллипс представляет орбитальную плоскость 408 спутника 100, когда он вращается вокруг Земли 404.
Если бы Земля 404 была совершенной сферой и была бы изолирована от других тел в солнечной системе, орбита спутника была бы эллипсом постоянного размера и формы, в плоскости, направление которой остается неизменным. Однако различные силы возмущают орбиту спутника 100, что вызывает изменение формы орбиты и ориентации орбитальной плоскости 408 до формы и орбиты, отличающейся от экваториальной плоскости 402. Например, силы тяготения Солнца и Луны, несферическая форма Земли 404, давление солнечного излучения и т. п. могут влиять на орбиту спутника 100. Возмущающие влияния могут приводить к наклону орбитальной плоскости 408 спутника 100 относительно экваториальной плоскости 402, который называют наклонением. Наклонение является элементом орбиты, который описывает угол между орбитальной плоскостью спутника и экваториальной плоскостью. Когда орбитальная плоскость 408 наклоняется относительно экваториальной плоскости 402, связь между орбитальной плоскостью 408 и экваториальной плоскостью 402 может быть описана их узлами орбиты. Восходящий узел находится в месте, где орбитальная плоскость 408 пересекает экваториальную плоскость 402, проходящую с юга на север. На фиг. 4 восходящий узел 412 составляет примерно 90° от первой точки весеннего равноденствия 406. Нисходящий узел находится в месте, где орбитальная плоскость 408 пересекает экваториальную плоскость 402, проходящую с юга на север. На фиг. 4 нисходящий узел 414 составляет примерно 270° от первой точки весеннего равноденствия 406, или 180° от восходящего узла 412.
Возмущающие влияния могут также приводить к тому, что орбита спутника 100 будет более эллиптической, чем круговой, что называют эксцентриситетом. Эксцентриситет представляет собой элемент орбиты, который показывает отклонение орбиты от круга. Значение эксцентриситета 0 показывает круговую орбиту, а значения между 0 и 1 описывают эллиптическую орбиту. Эксцентриситет орбиты может быть охарактеризован вектором эксцентриситета, который является вектором, направленным к перигею, и имеет амплитуду, равную скалярному эксцентриситету орбиты (амплитуда находится между 0 и 1, и является безразмерной). Когда орбита имеет эксцентриситет, больший чем 0, форма орбиты становится эллиптической вокруг Земли, а не круговой. Для эллиптической орбиты самую длинную и самую короткую линии, которые могут быть начерчены через центр эллипса, называют большой осью и малой осью, соответственно. Большая полуось – это половина большой оси, представляет собой среднее расстояние от спутника до Земли. Перигей – это точка орбиты, ближайшая к Земле, и противоположностью перигея является апогей, который является самой дальней точкой орбиты от Земли. При описании эллиптической орбиты вектор эксцентриситета направлен на перигей и имеет амплитуду, равную эксцентриситету (e) эллипса (0 < e < 1).
В приведенных ниже вариантах осуществления описаны маневры для удержания на орбите, которые компенсируют наклонение и эксцентриситет орбиты спутника. Маневры для удержания на орбите включают в себя импульсы включения одного или больше двигателей малой тяги спутника 100 при его вращении вокруг Земли 404. Импульс включения двигателя малой тяги создает или обеспечивает изменение скорости (ΔV) спутника 100. В примере варианта осуществления на фиг.5 представлены векторы скорости, полученные в результате импульсов включения двигателя малой тяги. Импульсы включения двигателя малой тяги могут создать ΔV в направлении по нормали, направлении по касательной и/или в радиальном направлении. Направление по нормали находится вне орбитальной плоскости спутника 100, направление по касательной – это направление перемещения спутника 100 по его орбите, и радиальное направление – направление к Земле 404. Хотя электрические ракетные двигатели 210-211 малой тяги не показаны на фиг. 5, импульс включения северного двигателя 210 малой тяги будет создавать ΔV в радиальном направлении (ΔVradial) и направлении по нормали (ΔVnormal) вследствие его угла наклона (см. фиг. 3). Импульс включения южного электрического двигателя 211 малой тяги будет создавать ΔV в радиальном направлении и направлении по нормали вследствие его угла наклона (см. фиг. 3). Импульс включения западного химического двигателя 220 малой тяги или восточного химического двигателя 221 малой тяги будет создавать ΔV в направлении по касательной (ΔVtan). ΔV в направлении по нормали может быть использована для компенсации наклонения орбитальной плоскости 408 (см. фиг. 4).
Маневры в узлах орбиты или вблизи них обеспечивают более эффективную компенсацию наклонения. Например, импульс включения северного электрического двигателя 210 малой тяги вблизи восходящего узла 412 создает ΔV в направлении по нормали, и импульс включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414 также создает ΔV в направлении по нормали. Общее ΔVnormal компенсирует наклонение орбитальной плоскости 408. Каждый из указанных импульсов включения создает ΔV в радиальном направлении.
Когда длительность импульсов включения одинакова, ΔVradial, созданная в восходящем узле 412 и нисходящем узле 414 взаимно уничтожаются, так что суммарная ΔVradial отсутствует.
Электрические ракетные двигатели 210-211 малой тяги эффективно используют для компенсации наклонения в данном режиме, но традиционно не используют для компенсации эксцентриситета орбиты спутника. В описанных здесь вариантах осуществления используют электрические ракетные двигатели 210-211 малой тяги для компенсации эксцентриситета в дополнение к наклонению.
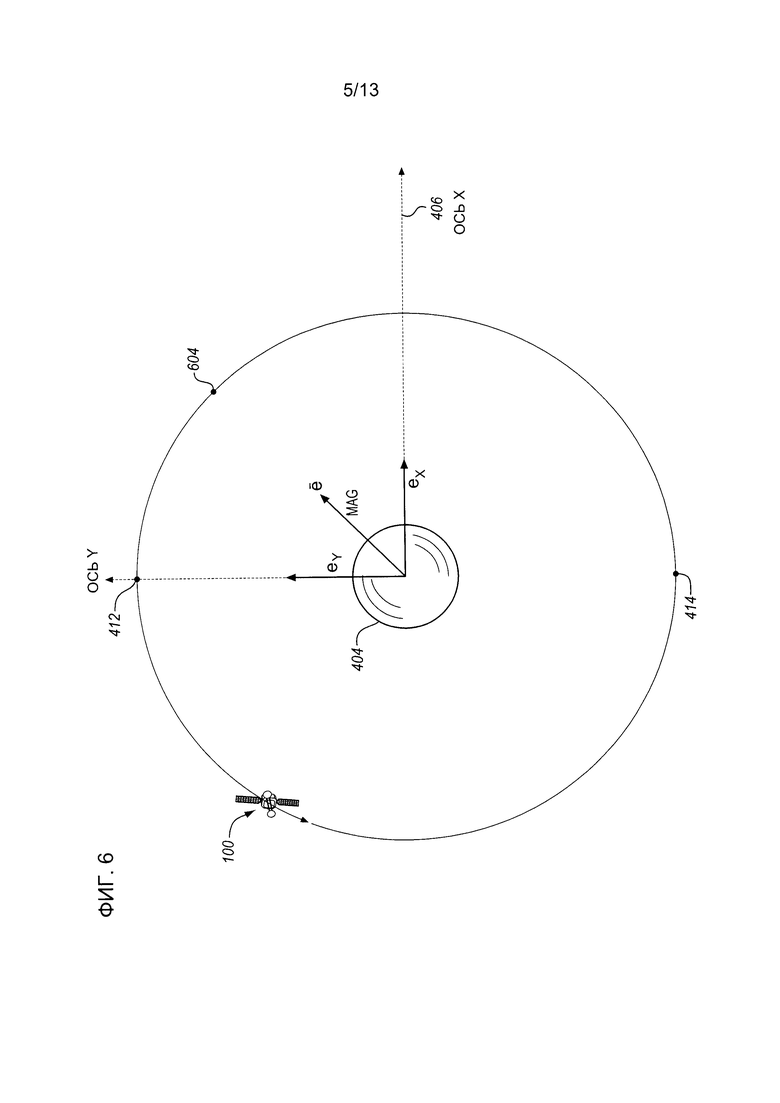
На фиг. 6 представлен эксцентриситет орбиты спутника 100. Орбита спутника 100 на фиг. 6 показана в геоцентрической системе координат, в качестве примера. Ось x (или ось K1) соответствует первой точке весеннего равноденствия 406, а ось y (или ось H1) показана, как находящаяся под углом 90° к оси x. Ось z для геоцентрической системы координат будет находиться с севера на юг вдоль полюсов Земли 404, которые находятся внутри и за пределами страницы на фиг. 6.
Эксцентриситет орбиты может быть представлен вектором эксцентриситета. Вектор эксцентриситета (ē) включает x-составляющую (eX) вдоль оси x и y-составляющую (eY) вдоль оси y. Вектор эксцентриситета направлен на перигей 604, и имеет амплитуду MAG.
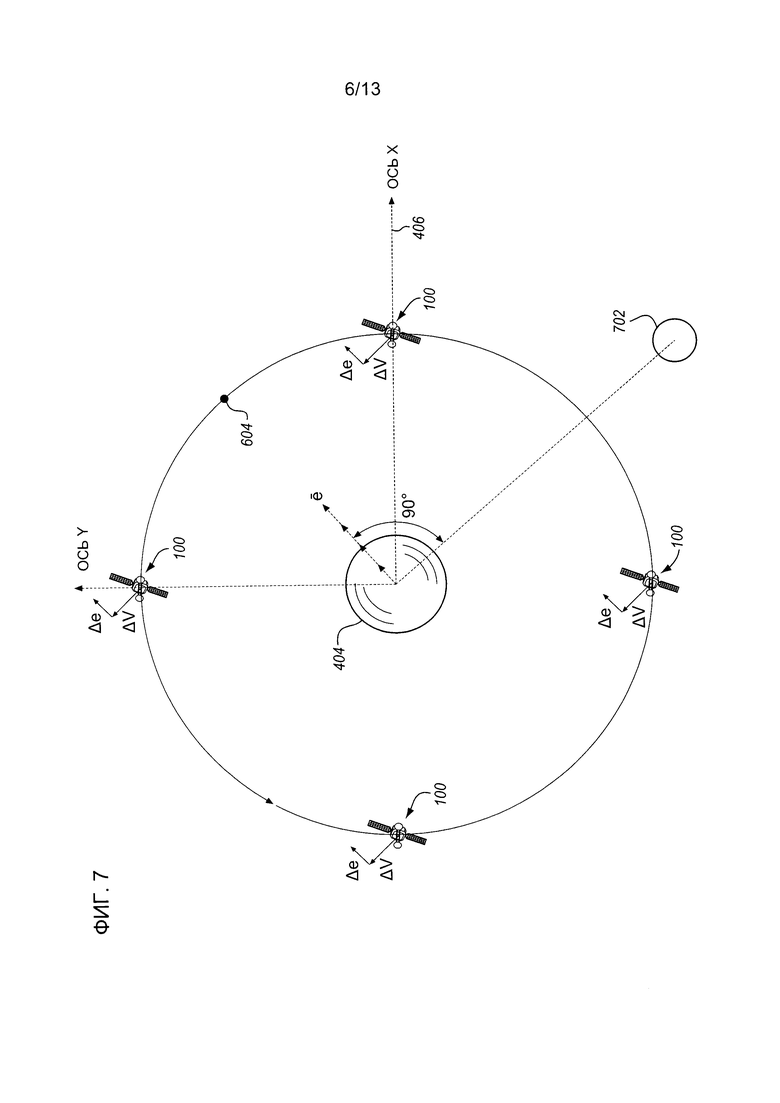
Эксцентриситет, показанный на фиг. 6, может быть вызван давлением солнечного излучения и/или другими возмущающими влияниями. На фиг. 7 представлен эксцентриситет, вызванный давлением солнечного излучения. В геоцентрической модели положение Солнца 702 зависит от времени года. Например, в весеннем равноденствии Солнце 702 будет находиться в первой точке весеннего равноденствия 406, которая равна 0°. За год Земля 404 будет «обращаться по орбите» вокруг Солнца 702 примерно на 1° в день (360° ÷ 365 дней ≈ 1° / день). Солнце 702 показано примерно под 300° на фиг. 7. Давление солнечного излучения от Солнца 702 подталкивает спутник 100 при движении по орбите. Указанное давление будет создавать ΔV в направлении от Солнца 702. На фиг. 7 показана ΔV, создаваемая в четырех различных положениях на орбите, 5 но понятно, что давление может влиять на спутник 100 вдоль всей орбиты.
Изменение скорости (ΔV) спутника 100 создает изменение в эксцентриситете (Δe), которое перпендикулярно ΔV. Как показано на фиг.7, каждое ΔV приводит к соответствующей составляющей Δe, которая направлена под 90° за ΔV. Составляющие Δe слагаются, чтобы получался вектор эксцентриситета для орбиты, вызванный давлением солнечного излучения. Как видно из фиг. 7, эксцентриситет, вызванный давлением солнечного излучения, направлен под 90º впереди Солнца 702. Таким образом, перигей для орбиты спутника переведет Солнце 702 на 90º. Если Солнце 702 было на нуле градусов (около 21 марта), вектор эксцентриситета, вызванный давлением солнечного излучения, будет направлен на 90º.
Если Солнце 702 было на 90º, эксцентриситет, вызванный давлением солнечного излучения, будет направлен на 180º. Если Солнце 702 было на 180º (около 21 сентября), вектор эксцентриситета, вызванный давлением солнечного излучения, будет направлен на 2700. Если Солнце 702 было на 270º, вектор эксцентриситета, возмущённый давлением солнечного излучения, будет направлен на 0º.
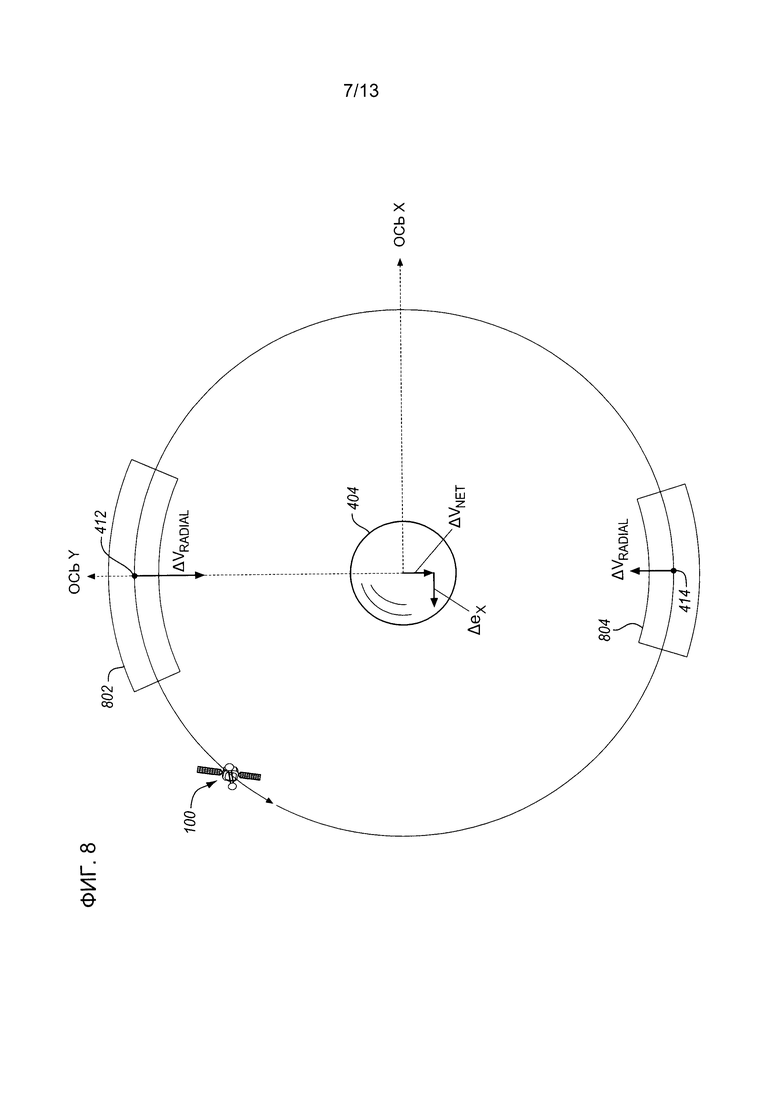
Описанные здесь маневры для удержания на орбите обладают возможностью компенсации эксцентриситета, вызванного давлением солнечного излучения и другими возмущающими влияниями. Маневры для удержания на орбите создают целевое Δe в направлении, противоположном эксцентриситету, вызванному давлением солнечного излучения и другими возмущающими влияниями. Для получения целевого Δe длительность импульса включения вблизи восходящего узла 412 отличается от длительности импульса включения вблизи нисходящего узла 414. В примере варианта осуществления на фиг. 8 представлена разность в длительностях импульсов включения вблизи восходящего узла 412 и нисходящего узла 414. В данном варианте осуществления длительность 802 импульса включения северного электрического двигателя 210 малой тяги показана вблизи восходящего узла 412, а длительность 804 импульса включения южного электрического двигателя 211 малой тяги показана вблизи нисходящего узла 414. Полное или суммарное время импульсов включения двигателей 210-211 малой тяги определяют по меньшей мере частично для компенсации наклонения орбитальной плоскости 408. Разность в длительностях 802 и 804 импульсов включения создает составляющую Δe вдоль оси x. Например, если полное время импульсов включения составляет 6 часов, на длительность 802 импульса включения может быть выделено 4 часа, тогда как на длительность 804 импульса включения может быть выделено 2 часа.
Импульс включения северного электрического двигателя 210 малой тяги создает ΔVradial, которое больше чем ΔVradial, создаваемое за счет импульса включения южного электрического двигателя 211 малой тяги. Суммарное ΔVradial, создаваемое за счет двух маневров, находится по существу вдоль оси y, и дает в результате составляющую Δe вдоль оси x. Радиальные скорости взаимно уничтожались бы, если бы импульсы включения имели одинаковую длительность. Когда существует разность между длительностями импульса включения северного двигателя 210 малой тяги и южного двигателя 211 малой тяги, ΔVradial в узлах орбиты взаимно не уничтожаются, и суммарное ΔVradial остается. В примере, показанном на фиг. 8, амплитуда ΔVradial в восходящем узле 412 больше, чем амплитуда ΔVradial в нисходящем узле 414, поскольку длительность импульса включения больше в восходящем узле 412. Разность в длительностях импульсов включения в двух узлах орбиты дает в результате составляющую Δe вдоль отрицательной полуоси x.
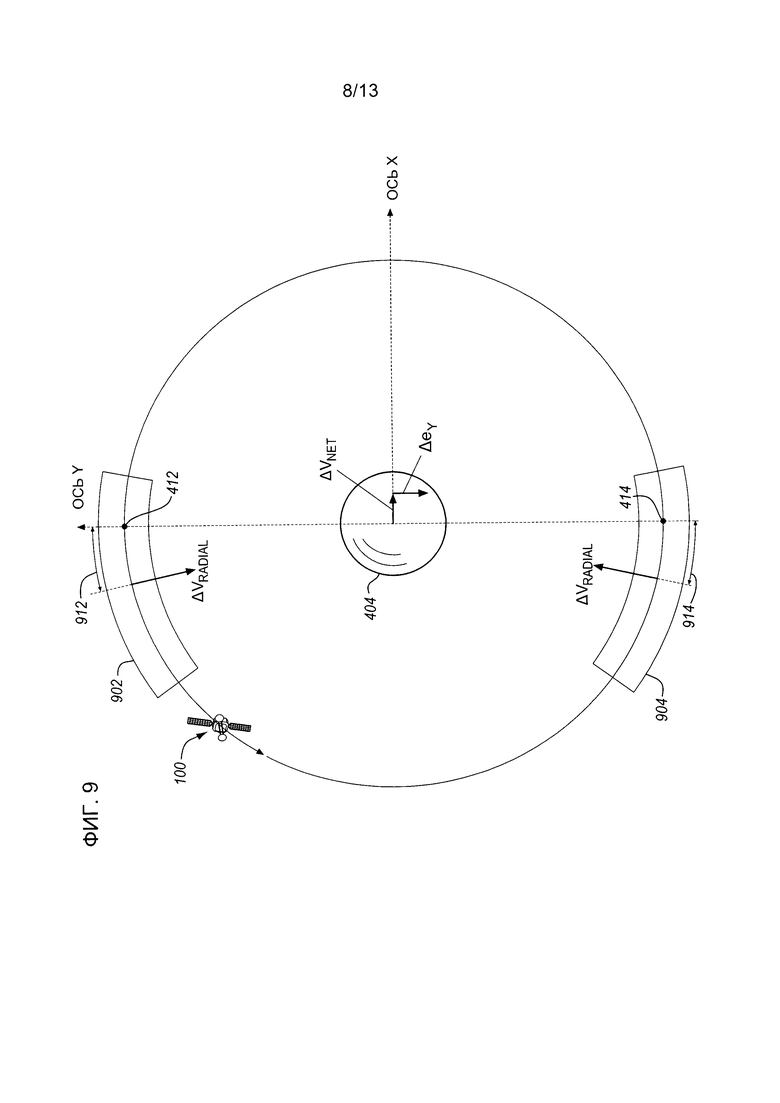
Для дополнительного получения целевой Δe на основе маневров, импульсы включения вблизи восходящего узла 412 и нисходящего узла 414 могут быть смещены во времени относительно соответствующих им узлов орбиты. В примере варианта осуществления на фиг. 9 приведено смещение импульса включения вблизи восходящего узла 412 и смещение импульса включения вблизи нисходящего узла 414. В данном варианте осуществления импульс включения 902 северного электрического двигателя 210 малой тяги показан вблизи восходящего узла 412, а импульс включения 904 южного электрического двигателя 211 малой тяги показан вблизи нисходящего узла 414. Центр импульса включения 902 смещен от восходящего узла 412 на смещение 912. Центр импульса включения 902 показан как имеющий место за восходящим узлом 412, но в других примерах он может находиться перед восходящим узлом 412.
Центр импульса включения 904 смещен от нисходящего узла 414 на смещение 914. Центр импульса включения 904 показан как имеющий место перед восходящим узлом 414, но в других примерах он может находиться за восходящим узлом 412. Смещения 912 и 914 могут быть описаны сдвигом во времени, градусами и т. п.
Разность в смещениях импульсов включения 902 и 904 создает составляющую Δe, по существу вдоль оси y. Импульс включения 902 северного электрического двигателя 210 малой тяги создает ΔVradial, и импульс включения 904 южного электрического двигателя 211 малой тяги создает ΔVradial. Суммарную ΔVradial получают за счет двух маневров, что дает в результате составляющую Δe вдоль оси y. Радиальные скорости взаимно уничтожались бы, если бы импульсы включения были центрированы в узлах 412 и 414 орбиты. Когда существует отклонение между смещениями северного двигателя 210 малой тяги и южного двигателя 211 малой тяги, ΔVradial в узлах орбиты взаимно не уничтожаются, и суммарное ΔVradial остается.
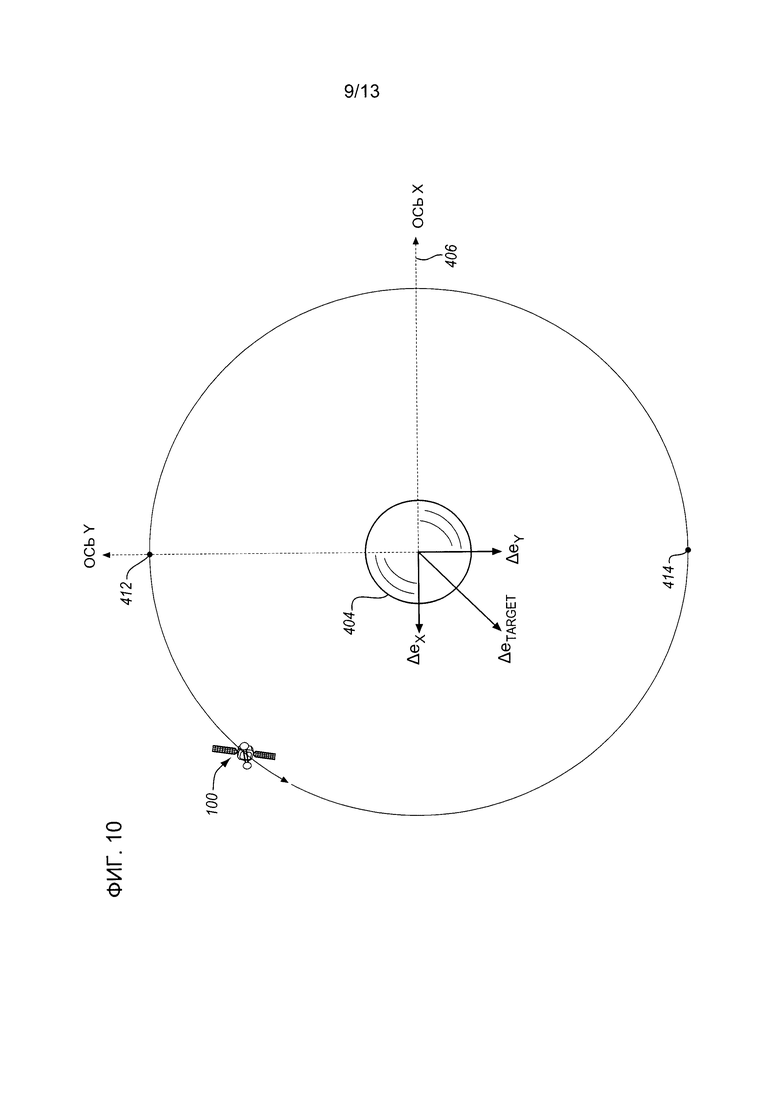
Для получения целевого Δe устройство 120 управления орбитой может изменять длительности импульса включения между узлами орбиты, чтобы получать составляющую Δe вдоль оси x (или по существу вдоль оси x). Кроме того, устройство 120 управления орбитой может изменять смещение импульса включения вблизи узлов орбиты для получения составляющей Δe вдоль оси y (или по существу вдоль оси y). Сочетание указанных двух отклонений может давать суммарное ΔVradial, что, в свою очередь, дает целевое Δe (Δetarget = Δex + Δey), что может компенсировать эксцентриситет, создаваемый давлением солнечного излучения и другими возмущающими влияниями. В примере варианта осуществления на фиг. 5 приведено целевое Δe, полученное вследствие маневров для удержания на орбите. Предположим для фиг. 10, что разность между длительностями импульсов включения создает составляющую Δex, а разность в смещениях импульсов включения создает составляющую Δey.
Составляющие Δex и Δey слагаются для создания целевого Δe. Устройство управления орбитой может корректировать маневры таким образом, что целевое Δe ориентировано в направлении, противоположном направлению вектора эксцентриситета, создаваемого давлением солнечного излучения и другими возмущающими влияниями, как показано на фиг. 7. Таким образом, маневры дляудержания на орбите могут компенсировать эксцентриситет, создаваемый под воздействием Солнца 702.
Если маневры, выполняемые электрическими ракетными двигателями 210-211 малой тяги, не обеспечивают достаточного ΔVradial для получения целевого Δe, устройство 120 управления орбитой может также запускать западный химический двигатель 220 малой тяги и/или восточный химический двигатель 221 малой тяги для помощи в получении целевого Δe. Импульсы включения химических двигателей 220-221 малой тяги могут быть выполнены в узлах орбиты или вблизи них, или могут 25 быть выполнены в других местоположениях вдоль орбиты спутника 100 на основе необходимого направления целевого Δe. Чтобы сложить составляющую Δe, полученную за счет импульсов включения электрических двигателей 210-211 малой тяги, устройство 120 управления орбитой может управлять импульсом включения восточного химического двигателя 221 малой тяги в месте, расположенном вдоль орбиты спутника 100, что дает ΔVtan спутника 100. ΔVtan создает составляющую Δe вследствие импульса включения восточного химического двигателя 221 малой тяги. Устройство 120 управления орбитой может также управлять импульсом включения западного химического двигателя 220 малой тяги в месте, расположенном вдоль орбиты спутника 100, что дает другое ΔVtan спутника 100. ΔVtan создает составляющую Δe вследствие импульса включения западного химического двигателя 220 малой тяги. Устройство 120 управления орбитой выбирает местоположения импульсов включения химических двигателей 220-221 малой тяги таким образом, чтобы составляющие Δe от этих импульсов включения слагались с составляющей Δe от импульсов включения электрических двигателей 210-211 малой тяги, для получения целевого Δe.
В примере варианта осуществления на фиг. 11 представлен импульс включения химического двигателя малой тяги вблизи восходящего узла 412 и/или нисходящего узла 414. Импульс включения восточного 15 химического двигателя 221 малой тяги будет создавать ΔV в направлении по касательной. Указанное ΔV противостоит орбитальному перемещению спутника 100 и называется тормозным импульсом ΔVtan вблизи восходящего узла 412 находится вдоль оси x, что создает составляющую Δe, по существу вдоль оси y. Указанная составляющая Δey слагается с составляющей Δe вследствие импульсов включения электрических двигателей 210-211 малой тяги для получения целевого Δe. Импульс включения западного химического двигателя 220 малой тяги будет создавать ΔV в направлении по касательной. Указанное ΔV совпадает с орбитальным перемещением спутника 100 и называется прямым импульсом. ΔVtan вблизи нисходящего узла 414 находится вдоль оси x, что создает составляющую Δe, по существу вдоль оси y. Указанная составляющая Δey слагается с составляющей Δe вследствие импульсов включения электрических двигателей 210-211 малой тяги и составляющей Δey вследствие импульсов включения восточного химического двигателя 221 малой тяги для получения целевого Δe. Маневры, показанные на фиг.11, являются только примерами для отображения того, каким образом импульсы включения одного или больше химических двигателей 220-221 малой тяги могут слагаться с составляющими Δe, полученными за счет импульсов включения электрических двигателей 210-211 малой тяги.
В примере варианта осуществления на фиг. 12 приведен импульс включения химического двигателя малой тяги в местоположениях вдоль орбиты спутника 100. Импульс включения западного химического двигателя 220 малой тяги и/или восточного химического двигателя 221 малой тяги может находиться фактически в любом месте, расположенном вдоль орбиты. Импульс включения восточного химического двигателя 221 малой тяги будет создавать ΔVtan в местоположении 1202, что создает составляющую Δex и составляющую Δey. Составляющие Δex и Δey могут слагаться с составляющей Δe вследствие импульсов включения электрических двигателей 210-211 малой тяги для получения целевого Δe.
Аналогично, импульс включения западного химического двигателя 220 малой тяги будет создавать ΔVtan в местоположении 1204, что создает составляющую Δex и составляющую Δey. Составляющие Δex и Δey могут слагаться с составляющей Δe вследствие импульсов включения электрических двигателей 210-211 малой тяги, составляющими Δex и Δey вследствие импульса включения восточного химического двигателя 221 малой тяги для получения целевого Δe. Местоположения 1202 и 1204, как правило, находятся на 180° друг от друга, но местоположения могут отклоняться от 180° друг от друга, в зависимости от необходимых составляющих Δe. Маневры, показанные на фиг. 12, являются только примерами для отображения того, каким образом импульсы включения одного или больше химических двигателей 220-221 малой тяги могут слагаться с составляющими Δe, полученными за счет импульсов включения электрических двигателей 210-211 малой тяги.
Устройство 120 управления орбитой может осуществлять какую-либо комбинацию маневров, описанных выше, для получения целевого Δe.
Пример процесса для осуществления удержания на орбите с помощью устройства 120 управления орбитой показан на фиг. 13-14. В примере варианта осуществления на фиг. 13-14 приведены блок-схемы, иллюстрирующие способ 1300 управления маневрами дляудержания на орбите спутника 100. Этапы способа 1300 будут описаны в отношении спутника 100 по фиг. 1-3, хотя специалисту в данной области должно быть понятно, что описанные здесь способы могут быть выполнены для других, не показанных спутников или систем. Этапы способа, описанные в настоящем документе, не являются всеобъемлющими, и могут включать другие этапы, которые не показаны. Этапы для схем, показанные здесь, также могут быть выполнены в другом порядке.
При инициировании маневров для удержания на орбите, устройство 120 управления орбитой может определять или устанавливать наклонение орбитальной плоскости 408 спутника 100 (этап 1302). Устройство 120 управления орбитой может также определять, устанавливать или оценивать эксцентриситет, создаваемый возмущающими влияниями, такими как давление солнечного излучения (этап 1304). Как описано выше, эксцентриситет от давления солнечного излучения изменяет направление на основании местоположения Солнца. Таким образом, устройство 120 управления орбитой может оценивать направление и амплитуду эксцентриситета, получаемого под воздействием давления солнечного излучения, на основе времени года.
Устройство 120 управления орбитой затем определяет параметры маневров для удержания на орбите, чтобы компенсировать наклонение орбитальной плоскости 408 и/или эксцентриситета, полученного из-за возмущающих влияний, таких как давление солнечного излучения. При определении параметров устройство 120 управления орбитой определяет полное время импульсов включения для северного электрического двигателя 210 малой тяги и южного электрического двигателя 211 малой тяги в сочетании (этап 1308). Полное время импульсов включения для северного электрического двигателя 210 малой тяги и южного электрического двигателя 211 малой тяги вычисляют, чтобы компенсировать наклонение орбитальной плоскости 408. Устройство 120 управления орбитой затем разделяет полное время импульсов включения на различные длительности импульсов включения вблизи восходящего узла 412 и нисходящего узла 414. При импульсе включения «вблизи» узла орбиты импульс включения находится вблизи или вплотную к узлу орбиты.
Устройство 120 управления орбитой выбирает длительность импульса включения северного электрического двигателя 210 малой тяги вблизи восходящего узла 412, которая отличается от длительности импульса включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414 (этап 1210). Разность в длительностях импульсов включения вб лизи восходящего и нисходящего узлов создает составляющую Δe, по существу вдоль оси x (см. фиг. 8).
Устройство 120 управления орбитой также определяет, когда выполняются импульсы включения относительно узлов орбиты.
Устройство 120 управления орбитой выбирает смещение импульса включения северного электрического двигателя 210 малой тяги относительно восходящего узла 412, которое отличается от смещения импульса включения южного электрического двигателя 211 малой тяги относительно нисходящего узла 414 (этап 1312). Смещение указывает сдвиг центра импульса включения от узла орбиты. В традиционных маневрах для удержания на орбите импульсы включения центрировались около восходящего узла и нисходящего узла. В данном варианте осуществления центр импульсов включения северного электрического двигателя 210 малой тяги и южного электрического двигателя 211 малой тяги могут быть смещены от центра узлов орбиты по времени, градусам и т. п. Минимальное смещение для одного из импульсов включения равно нулю, а максимальное смещение ограничено длительностью импульса включения и величиной необходимой корректировки наклонения.
Разность в смещениях импульсов включения вблизи восходящего и нисходящего узлов создает составляющую Δe, по существу вдоль оси y (см. фиг. 9).
Устройство 120 управления орбитой затем управляет импульсом включения северного электрического двигателя 210 малой тяги вблизи восходящего узла 412 (этап 1314), и управляет импульсом включения южного электрического двигателя 211 малой тяги вблизи нисходящего узла 414 (этап 1316). Импульсы включения электрических двигателей 210-211 малой тяги могут выполняться ежедневно (или почти ежедневно в течение годового периода или дольше).
Если импульсы включения электрических двигателей малой тяги не создают достаточную составляющую Δe, устройство 120 управления орбитой может управлять импульсом включения западного химического двигателя 220 малой тяги и/или восточного химического двигателя 221 малой тяги, как показано на фиг. 14. Устройство 120 управления орбитой может управлять импульсом включения восточного химического двигателя 221 малой тяги в месте, расположенном вдоль орбиты спутника 100 (этап 1318), что дает другое ΔVtan спутника 100. ΔVtan создает составляющую Δe вследствие импульса включения восточного химического двигателя 221 малой тяги. Устройство 120 управления орбитой может, кроме того, управлять импульсом включения западного химического двигателя 220 малой тяги в месте, расположенном вдоль орбиты спутника 100 (этап 1320), что дает ΔVtan спутника 100. ΔVtan создает составляющую Δe вследствие импульса включения западного химического двигателя 220 малой тяги. Устройство 120 управления орбитой выбирает местоположение импульса включения восточного химического двигателя 221 малой тяги и/или местоположение импульса включения западного химического двигателя 220 малой тяги, таким образом, чтобы их составляющие Δe слагались с составляющей Δe вследствие импульса включения электрических двигателей 210-211 малой тяги. Сложение данных составляющих Δe компенсирует эксцентриситет из-за возмущающих влияний.
Сочетание импульсов включения, описанных выше, обеспечивает возможность получения целевого Δe для компенсации возмущающих влияний. Например, чтобы противодействовать эксцентриситету, вызванному воздействием Солнца, маневры для удержания на орбите, описанные выше, могут создавать целевое Δe, направленное примерно на 90º за Солнцем. Целевое Δe ориентировано в направлении, противоположном вектору эксцентриситета, вызванного воздействием Солнца. Поскольку положение Солнца изменяется в течение года, устройство 120 управления орбитой может корректировать маневры для удержания на орбите таким образом, чтобы целевое Δe продолжало ориентироваться примерно на 90º за Солнцем.
Какой-либо из различных элементов, показанных на чертежах или описанных в настоящем документе, может быть воплощен в аппаратуре, программном обеспечении, программно-аппаратных средствах или их сочетании. Например, элемент может быть выполнен в виде выделенных аппаратных средств. Элементы выделенных аппаратных средств могут называться «процессоры», «контроллеры» или другими аналогичными терминами. При выполнении процессором функции могут быть выполнены одним выделенным процессором, одним совместно используемым процессором или множеством отдельных процессоров, некоторые из которых могут быть совместно используемыми. Кроме того, явное использование термина «процессор» или «контроллер» не следует истолковывать для ссылки исключительно на аппаратные средства, способные выполнять программу, и могут неявно включать, в том числе, аппаратуру процессора цифровой обработки сигналов (digital signal processor, DSP), сетевой процессор, специализированную интегральную схему (application specific integrated circuit, ASIC) или другую схему, программируемую пользователем вентильную матрицу (field programmable gate array, FPGA), постоянное запоминающее устройство (ПЗУ) для сохранения программного обеспечения, оперативное запоминающее устройство (ОЗУ), энергонезависимое запоминающее устройство, логическое устройство или некоторые другие физические компоненты или модули аппаратных средств.
Кроме того, элемент может быть реализован в виде команд, выполняемых процессором или компьютером, для выполнения функцией элемента. Некоторыми примерами команд является программное обеспечение, управляющая программа, и программно-аппаратные средства. Команды находятся в рабочем состоянии при выполнении процессором, чтобы управлять процессором для выполнения функций элемента. Команды могут быть сохранены на запоминающих устройствах, которые выполнены с возможностью считывания процессором.
Некоторыми примерами запоминающих устройств являются цифровые или твердотельные запоминающие устройства, магнитные запоминающие устройства, такие как магнитные диски и магнитные ленты, жесткие диски или оптически считываемые цифровые запоминающие носители данных.
Кроме того, изобретение включает в себя варианты осуществления в соответствии со следующими пунктами:
Пункт 1. Спутник, выполненный с возможностью обращения вокруг Земли, содержащий:
спутниковую платформу, имеющую сторону надира, обращенную к Земле и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северной области стороны зенита и ориентированный вниз, для создания тяги через центр масс спутника;
южный электрический двигатель малой тяги, установленный в направлении южной области стороны зенита и ориентированный вверх, для создания тяги через центр масс спутника, и
устройство управления орбитой, управляющее маневрами для удержания спутника на орбите; причем устройство управления орбитой выполнено с возможностью выбора длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла;
устройство управления орбитой выполнено с возможностью выбора смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла.
Пункт 2. Спутник по пункту 1, который содержит:
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника.
Пункт 3. Спутник по пункту 2, в котором:
устройство управления орбитой выполнено с возможностью управления импульсом включения одного из западного химического двигателя малой тяги или восточного химического двигателя малой тяги вблизи восходящего узла.
Пункт 4. Спутник по пункту 3, в котором:
устройство управления орбитой выполнено с возможностью управления импульсом включения другим одним из западного химического двигателя малой тяги или восточного химического двигателя малой тяги вблизи нисходящего узла.
Пункт 5. Спутник по пункту 2, в котором:
разность в длительностях импульсов включения для электрических двигателей малой тяги и разность в смещениях импульсов включения электрических двигателей малой тяги создает суммарное изменение радиальной скорости спутника, при этом суммарное изменение радиальной скорости создает составляющую дельта-эксцентриситета для орбиты спутника вследствие импульсов включения электрических двигателей малой тяги;
устройство управления орбитой выполнено с возможностью управления импульсом включения одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги в первом месте, расположенном вдоль орбиты спутника, что создает первое тангенциальное изменение скорости спутника, при этом первое тангенциальное изменение скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги, и
устройство управления орбитой выполнено с возможностью выбора первого местоположения импульса включения одного химического двигателя малой тяги, так, чтобы составляющая дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги.
Пункт 6. Спутник по пункту 5, в котором:
устройство управления орбитой выполнено с возможностью управления импульсом включения другого одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги во втором месте, расположенном вдоль орбиты спутника, что создает второе тангенциальное изменение скорости спутника, при этом второе тангенциальное изменение скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги;
устройство управления орбитой выполнено с возможностью выбора второго местоположения импульса включения другого химического двигателя малой тяги, так, чтобы составляющая дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги и составляющей дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги.
Пункт 7. Спутник по пункту 1, в котором:
устройство управления орбитой выполнено с возможностью определения наклонения орбитальной плоскости спутника и определения полного времени импульсов включения для импульса включения северного электрического двигателя малой тяги и импульса включения южного двигателя малой тяги на основе наклонения.
Пункт 8. Спутник по пункту 1, в котором:
устройство управления орбитой выполнено с возможностью определения положения Солнца в геоцентрической системе координат на основе времени года и выбора длительности и смещения импульса включения северного электрического двигателя малой тяги, и длительности и смещения импульса включения южного электрического двигателя малой тяги для получения целевого изменения вектора эксцентриситета, который направлен за положение Солнца на 90º ± 5°.
Пункт 9. Спутник по пункту 1, в котором:
северный электрический двигатель малой тяги ориентирован под первым углом к оси север-юг спутника, причем первый угол составляет 35° ± 25°, и южный электрический двигатель малой тяги ориентирован под вторым углом к оси север-юг спутника, причем второй угол составляет 35°± 25°.
Пункт 10. Спутник по пункту 1, в котором:
северный электрический двигатель малой тяги и южный электрический двигатель малой тяги используют ксенон в качестве топлива.
Пункт 11. Способ управления маневрами для удержания на орбите спутника, в котором спутник содержит спутниковую платформу, имеющую сторону надира, обращенную к Земле, и сторону зенита, противоположную стороне надира, северный электрический двигатель малой тяги, установленный в направлении северной области стороны зенита и ориентированный вниз, для создания тяги через центр масс спутника, и южный электрический двигатель малой тяги, установленный в направлении южной области стороны зенита и ориентированный вверх, для создания тяги через центр масс спутника, при этом способ включает в себя:
выбор длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла, и выбор смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла.
Пункт 12. Способ по пункту 11, в котором:
спутник дополнительно содержит восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника, и западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника;
способ дополнительно включает в себя:
управление импульсом включения одного из западного химического двигателя малой тяги или восточного химического двигателя малой тяги вблизи восходящего узла.
Пункт 13. Способ по пункту 12, дополнительно включающий в себя:
управление импульсом включения другого одного из западного химического двигателя малой тяги или восточного химического двигателя малой тяги вблизи нисходящего узла.
Пункт 14. Способ по пункту 11, в котором:
спутник дополнительно содержит восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника, и западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника; и
разность в длительностях импульсов включения для электрических двигателей малой тяги и разность в смещениях импульсов включения электрических двигателей малой тяги создает суммарное изменение радиальной скорости спутника, при этом суммарное изменение радиальной скорости создает составляющую дельта-эксцентриситета для орбиты спутника вследствие импульсов включения электрических двигателей малой тяги;
способ, кроме того, включает в себя:
управление импульсом включения одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги в первом месте, расположенном вдоль орбиты спутника, что создает первое тангенциальное изменение скорости спутника, при этом первое тангенциальное изменение скорости создает составляющую векторадельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги;
при этом первое местоположение импульса включения одного химического двигателя малой тяги выбирают таким образом, чтобы составляющая дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги.
Пункт 15. Способ по пункту 14, кроме того включающий в себя:
управление импульсом включения другого одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги во втором месте, расположенном вдоль орбиты спутника, что создает второе тангенциальное изменение скорости спутника, при этом второе тангенциальное изменение скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги, при этом второе местоположение импульса включения другого химического двигателя малой тяги выбирают таким образом, чтобы составляющая вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги и составляющей дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги.
Пункт 16. Способ по пункту 11, кроме того включающий в себя:
определение наклонения орбитальной плоскости спутника и определение полного времени импульсов включения для импульса включения северного электрического двигателя малой тяги и импульса включения южного электрического двигателя малой тяги.
Пункт 17. Способ по пункту 11, кроме того включающий в себя:
определение положения Солнца в геоцентрической системе координат в соответствии с временем года и
выбор длительности и смещения импульса включения северного электрического двигателя малой тяги, и длительности и смещения импульса включения южного электрического двигателя малой тяги для получения целевого изменения вектора эксцентриситета, который направлен за положение Солнца на 90º ± 5°.
Пункт 18. Спутник, содержащий:
устройство управления орбитой, выполненное с возможностью управления маневрами для удержания спутника на орбите, при этом спутник содержит:
спутниковую платформу, имеющую сторону надира, обращенную к Земле, и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северной области стороны зенита и ориентированный вниз, для создания тяги через центр масс спутника;
южный электрический двигатель малой тяги, установленный в направлении южной области стороны зенита и ориентированный вверх для создания тяги, проходящей через центр масс спутника;
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги, проходящей через центр масс спутника, и западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги, проходящей через центр масс спутника, причем устройство управления орбитой выполнено с возможностью выбора длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла;
устройство управления орбитой выполнено с возможностью выбора смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла.
Пункт 19. Спутник по пункту 18, в котором:
разность в длительностях импульсов включения для электрических двигателей малой тяги и разность в смещениях импульсов включения электрических двигателей малой тяги создает суммарное изменение радиальной скорости спутника, при этом суммарное изменение радиальной скорости создает составляющую дельта-эксцентриситета для орбиты спутника вследствие импульсов включения электрических двигателей малой тяги;
устройство управления орбитой выполнено с возможностью управления импульсом включения одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги в первом месте, расположенном вдоль орбиты спутника, что создает первое тангенциальное изменение скорости спутника, при этом первое тангенциальное изменение скорости создает составляющую дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги, и устройство управления орбитой выполнено с возможностью выбора первого местоположения импульса включения одного химического двигателя малой тяги так, чтобы составляющая дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги.
Пункт 20. Спутник по пункту 19, в котором:
устройство управления орбитой выполнено с возможностью управления импульсом включения другого одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги во втором месте, расположенном вдоль орбиты спутника, что создает второе тангенциальное изменение скорости спутника, при этом второе тангенциальное изменение скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги;
устройство управления орбитой выполнено с возможностью выбора второго местоположения импульса включения другого химического двигателя малой тяги так, чтобы составляющая дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги слагалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги и составляющей вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги.
Хотя в настоящем документе описаны конкретные варианты осуществления, объем изобретения не ограничен указанными конкретными вариантами осуществления. Наоборот, объем изобретения ограничен следующими пунктами формулы изобретения и их эквивалентами.

Группа изобретений относится к управлению движением спутников, и в частности к удержанию параметров орбиты спутника (в частности, геостационарного) в заданных пределах. Спутник содержит северный и южный электрические двигатели малой тяги, а также восточный и западный химические двигатели малой тяги. Бортовое устройство управления орбитой спутника обеспечивает требуемые длительности импульсов включения тех или иных электрических двигателей вблизи нисходящего и восходящего узлов орбиты и смещения участков их включения относительно этих узлов. Химические двигатели включаются также в других точках орбиты. Это позволяет, в частности, обеспечить заданную величину и ориентацию вектора эксцентриситета, подверженного возмущениям от солнечного давления. Технический результат направлен на повышение эффективности орбитального маневрирования спутника, в частности на экономию топлива для манёвров. 3 н. и 10 з.п. ф-лы, 14 ил.
1. Спутник, выполненный с возможностью вращения по орбите вокруг Земли и содержащий:
спутниковую платформу, имеющую сторону надира, обращенную к Земле, и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северной области стороны зенита и ориентированный для создания тяги через центр масс спутника;
южный электрический двигатель малой тяги, установленный в направлении южной области стороны зенита и ориентированный для создания тяги через центр масс спутника;
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника;
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника, и
устройство управления орбитой, управляющее маневрами для удержания спутника на орбите; причем устройство управления орбитой выполнено с возможностью выбора длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла;
устройство управления орбитой выполнено с возможностью выбора смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла,
устройство управления орбитой выполнено с возможностью управления импульсом включения одного или большего количества двигателей из западного химического двигателя малой тяги или восточного химического двигателя малой тяги вблизи одного или большего количества узлов из восходящего узла и нисходящего узла.
2. Спутник по п. 1, в котором:
разность в длительностях импульсов включения для электрических двигателей малой тяги и разность в смещениях импульсов включения электрических двигателей малой тяги создает суммарное изменение радиальной скорости спутника, при этом суммарное изменение радиальной скорости создает составляющую дельта-эксцентриситета для орбиты спутника вследствие импульсов включения электрических двигателей малой тяги;
устройство управления орбитой выполнено с возможностью управления импульсом включения одного или большего количества двигателей из восточного химического двигателя малой тяги или западного химического двигателя малой тяги в первом месте, расположенном вдоль одного или больше местоположений вдоль орбиты спутника, что создает по меньшей мере одно из первого и второго тангенциальных изменений скорости спутника, при этом первое тангенциальное изменение скорости создает одну или более составляющих дельта-эксцентриситета вследствие импульса включения указанных одного или больше химических двигателей малой тяги, и
устройство управления орбитой выполнено с возможностью выбора по меньшей мере одного из первого и второго местоположений импульсов включения указанных одного или более химических двигателей малой тяги таким образом, чтобы составляющие дельта-эксцентриситета вследствие импульсов включения указанных одного или более химических двигателей малой тяги складывались с составляющими дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги.
3. Спутник по п. 1, в котором:
устройство управления орбитой выполнено с возможностью определения наклонения орбитальной плоскости спутника и определения полного времени импульсов включения для импульса включения северного электрического двигателя малой тяги и импульса включения южного двигателя малой тяги на основе наклонения.
4. Спутник по п. 1, в котором:
устройство управления орбитой выполнено с возможностью определения положения Солнца в геоцентрической системе координат на основе времени года и с возможностью выбора длительности и смещения импульса включения северного электрического двигателя малой тяги, а также длительности и смещения импульса включения южного электрического двигателя малой тяги для получения целевого изменения эксцентриситета, который направлен за положение Солнца на 90º± 5°.
5. Спутник по п. 1, в котором:
северный электрический двигатель малой тяги ориентирован под первым углом к оси север-юг спутника, причем первый угол составляет 35° ± 25°, и
южный электрический двигатель малой тяги ориентирован под вторым углом к оси север-юг спутника, причем второй угол составляет 35° ± 25°.
6. Спутник по п. 1, в котором:
северный электрический двигатель малой тяги и южный электрический двигатель малой тяги используют ксенон в качестве топлива.
7. Способ управления маневрами для удержания спутника на орбите, в котором спутник содержит
спутниковую платформу, имеющую сторону надира, обращенную на Землю, и сторону зенита, противоположную стороне надира,
северный электрический двигатель малой тяги, установленный в направлении северной области стороны зенита и ориентированный для создания тяги через центр масс спутника, и
южный электрический двигатель малой тяги, установленный в направлении южной области стороны зенита и ориентированный для создания тяги через центр масс спутника,
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника;
при этом способ включает в себя:
выбор длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла, и
выбор смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла, и
управление импульсом включения одного из западного химического двигателя малой тяги или восточного химического двигателя малой тяги вблизи восходящего узла.
8. Способ по п. 7, дополнительно включающий в себя:
управление импульсом включения другого одного из западного химического двигателя малой тяги или восточного химического двигателя малой тяги вблизи нисходящего узла.
9. Способ по п. 7, в котором:
спутник дополнительно содержит
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника; и
разность в длительностях импульсов включения для электрических двигателей малой тяги и разность в смещениях импульсов включения электрических двигателей малой тяги создает суммарное изменение радиальной скорости спутника, при этом суммарное изменение радиальной скорости создает составляющую дельта-эксцентриситета для орбиты спутника вследствие импульсов включения электрических двигателей малой тяги; при этом
способ, дополнительно, включает в себя:
управление импульсом включения одного из восточного химического двигателя малой тяги или западного химического двигателя малой тяги в первом месте, расположенном вдоль орбиты спутника, что создает первое тангенциальное изменение скорости спутника, при этом первое тангенциальное изменение скорости создает составляющую вектора дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги;
причем первое местоположение импульса включения одного химического двигателя малой тяги выбирают таким образом, чтобы составляющая дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги складывалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги.
10. Способ по п. 9, дополнительно включающий в себя:
управление импульсом включения другого из восточного химического двигателя малой тяги или западного химического двигателя малой тяги во втором месте, расположенном вдоль орбиты спутника, что создает второе тангенциальное изменение скорости спутника, при этом второе тангенциальное изменение скорости создает составляющую дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги, причем при этом второе местоположение импульса включения указанного другого химического двигателя малой тяги выбирают таким образом, чтобы составляющая дельта-эксцентриситета вследствие импульса включения другого химического двигателя малой тяги складывалась с составляющей дельта-эксцентриситета вследствие импульсов включения электрических двигателей малой тяги и составляющей дельта-эксцентриситета вследствие импульса включения одного химического двигателя малой тяги.
11. Способ по п. 7, дополнительно включающий в себя:
определение наклонения орбитальной плоскости спутника и определение полного времени импульсов включения для импульса включения северного электрического двигателя малой тяги и импульса включения южного электрического двигателя малой тяги на основе наклонения.
12. Способ по п. 7, дополнительно включающий в себя:
определение положения Солнца в геоцентрической системе координат на основе времени года и
выбор длительности и смещения импульса включения северного электрического двигателя малой тяги и длительности и смещения импульса включения южного электрического двигателя малой тяги для получения целевого изменения эксцентриситета, который направлен за положение Солнца на 90º± 5°.
13. Спутник, выполненный с возможностью вращения по орбите вокруг Земли и содержащий:
устройство управления орбитой, выполненное с возможностью управления маневрами для удержания на орбите спутника, при этом спутник содержит:
спутниковую платформу, имеющую сторону надира, обращенную к Земле, и сторону зенита, противоположную стороне надира;
северный электрический двигатель малой тяги, установленный в направлении северной области стороны зенита и ориентированный для создания тяги через центр масс спутника;
южный электрический двигатель малой тяги, установленный в направлении южной области стороны зенита и ориентированный для создания тяги через центр масс спутника;
восточный химический двигатель малой тяги, установленный на восточной стороне спутниковой платформы для создания тяги через центр масс спутника, и
западный химический двигатель малой тяги, установленный на западной стороне спутниковой платформы для создания тяги через центр масс спутника, причем
устройство управления орбитой выполнено с возможностью выбора длительности импульса включения северного электрического двигателя малой тяги вблизи восходящего узла, которая отличается от длительности импульса включения южного электрического двигателя малой тяги вблизи нисходящего узла; и
устройство управления орбитой выполнено с возможностью выбора смещения импульса включения северного электрического двигателя малой тяги относительно восходящего узла, которое отличается от смещения импульса включения южного электрического двигателя малой тяги относительно нисходящего узла.
| US 5984236 А, 16.11.1999 | |||
| US 6042058 A, 28.03.2000 | |||
| US 5443231 A, 22.08.1995 | |||
| US 6015116 A, 18.01.2000 | |||
| US 7918420 B2, 05.04.2011 | |||
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |

