Изобретение относится к космической области, а именно к способам управления группировками близколетящих искусственных спутников Земли, а более точно, касается управления группой спутников, размещенных на геостационарной орбите (ГСО) в одних и тех же или пересекающихся долготных и широтных диапазонах.
Необходимость совместного управления спутниками на ГСО обусловлена, по крайней мере, одной из следующих проблем:
размещение новых спутников на ГСО при ограниченном числе возможных орбитальных позиций;
размещением спутников одной группировки в виде некоторого виртуального объекта связи, таким образом, что все спутники движутся внутри диаграммы направленности антенных систем наземного сегмента.
В основе решения этих проблем лежат вопросы удержания спутников в орбитальной позиции по географической долготе и широте, в сочетании с требованиями обеспечения безопасного относительного движения. Кроме того, в случае объединения спутников, с точки зрения связи, в единый объект расстояние между спутниками не должно превышать некоторого максимального значения.
Известны способы управления кластерами спутников на геостационарных орбитах (патенты США №5120007, кл. 244/158. R; №5506780, кл. 364/459; Watanabe H. et al., "Results of operational simulation about orbital control model for plural satellites", Proceedings of the First European Conf. on Space Debris, Darmstadt, Germany, 5-7 April 1993, ESA SD-01, pp.657-662; Ono Т., Montenbruck O. et al., "A study of new colocation control system", AIAA Paper, №98-1350, 1998, 10 рр.), основанные на разнесении относительных векторов наклонения и эксцентриситетов:




где Ej, Ij - векторы эксцентриситета и наклонения j-го спутника; еj, ij, Ωj и ωj эксцентриситет, наклонение орбиты, долгота восходящего узла и аргумент перицентра; ΔEjk и ΔIjk - относительные векторы эксцентриситета и наклонения между j и k спутниками. Геометрически разнесение этих векторов означает, что линия узлов пересечения плоскостей орбит не совпадает с линией равных высот спутников. Таким образом, каково бы ни было положение спутников на этих орбитах, относительное расстояние между ними всегда будет не менее некоторого предельного значения определяемого векторами ΔEjk и ΔIjk. Особенности орбитальной эволюции в этих методах, как правило, не учитываются.
Известен способ управления спутниками на ГСО без разнесения их орбитальных элементов (Chao C.C., Peterson G.E., Menn M.D. "Formationkeeping strategies for GEO halo collocation", AIAA Paper, №2000-4136, 2000, 10 рр.), заключающийся в организации полета спутников по одним и тем же орбитам со сдвигом их положений вдоль орбиты (по средней аномалии).
Известен способ управления совместным безопасным полетом двух геостационарных спутников (Pattinson L. "EUTELSAT satellite colocation", AIAA Paper, №96-1187, 1996, 9 pp.), выбранный за прототип. Способ управления кластером находящихся на геостационарной орбите спутников, размещенных в одних и тех же или в пересекающихся долготных и широтных диапазонах, заключающийся в измерении параметров орбиты, определении по ним текущих значений орбитальных элементов, сравнении их с требуемыми, и проведении на основе этого маневров с помощью исполнительных органов в виде химических двигателей большой тяги для коррекции наклонения орбиты, эксцентриситета и орбитального периода, заключается также в разнесении относительных векторов наклонения и эксцентриситета, но при этом учитываются особенности орбитальной эволюции вектора эксцентриситета - долговременная эволюция годографа вектора эксцентриситета, описывающего окружность в годичном движении.
Однако этот способ требует согласованного проведения маневров на всех спутниках в один и тот же день, что существенным образом усложняет управление всеми спутниками. Особенности орбитальной эволюции вектора наклонения в прототипе не учитываются, что приводит к дополнительным расходам топлива.
В основу изобретения положена задача разработки экономичного по затратам топлива и не требующего согласованного проведения маневров на спутниках способа долговременного управления кластером спутников на геостационарной орбите, обеспечивающего их полет на относительных расстояниях, изменяющихся в определенных пределах, в том числе совместный безопасный полет.
Технический результат изобретения достигается тем, что в способе управления кластером находящихся на геостационарной орбите спутников, заключающемся в измерении параметров орбиты каждого спутника, определении по ним текущих значений орбитальных элементов каждого спутника, сравнении их с требуемыми и проведении на основе этого маневров с помощью исполнительных органов для коррекции наклонения орбиты, эксцентриситета и орбитального периода, в отличие от известного согласно первому варианту выполнение маневров на каждом из спутников осуществляют с помощью исполнительных органов в виде двигателей малой тяги, переводя вектора наклонения в разнесенные друг относительно друга кольцевые области так, чтобы угол между линией, соединяющей текущее положение конца каждого вектора с центром соответствующей ему кольцевой области, и направлением на Солнце был равен увеличенной на 180 град величине прямого восхождения Солнца, одновременно проводят маневры, переводящие вектора эксцентриситета спутников в разнесенные друг относительно друга кольцевые области так, чтобы линия, соединяющая текущее положение конца каждого вектора с центром соответствующей ему кольцевой области, отставала от направления на Солнце на половину углового расстояния при движении вектора эксцентриситета по окружности естественного дрейфа в пределах кольцевой области, далее на протяжении всего полета производят изменение относительного расстояния между спутниками в требуемых пределах за счет компенсации квазивекового приращения вектора наклонения каждого спутника в сочетании с коррекцией вектора эксцентриситета, при которой в момент прохождения вектором эксцентриситета середины интервала между точкой входа окружности естественного дрейфа в кольцевую область допустимого изменения вектора эксцентриситета и точкой выхода из этой области линия, соединяющая центр окружности естественного дрейфа и центр соответствующей ему кольцевой области допустимого изменения вектора эксцентриситета, совпадала с направлением на Солнце, приводя тем самым к постоянству относительных векторов наклонения и эксцентриситета.
Технический результат изобретения достигается тем, что в способе управления кластером находящихся на геостационарной орбите спутников, заключающемся в измерении параметров орбиты каждого спутника, определении по ним текущих значений орбитальных элементов каждого спутника, сравнении их с требуемыми, и проведении на основе этого маневров с помощью исполнительных органов для коррекции наклонения орбиты, эксцентриситета и орбитального периода в отличие от известного согласно второму варианту выполнение маневров на каждом из спутников осуществляют с помощью исполнительных органов в виде двигателей малой тяги, переводя вектора наклонения в разнесенные друг относительно друга кольцевые области так, чтобы угол между линией, соединяющей текущее положение конца каждого вектора с центром соответствующей ему кольцевой области, и направлением на Солнце был равен увеличенной на 180 град, величине прямого восхождения Солнца, при этом проводят маневры, переводящие вектора эксцентриситета спутников в разнесенные друг относительно друга кольцевые области так, чтобы линия, соединяющая текущее положение конца каждого вектора с центром соответствующей ему кольцевой области, совпадала с направлением на Солнце, далее на протяжении всего полета производят изменение относительного расстояния между спутниками в требуемых пределах за счет компенсации квазивекового приращения вектора наклонения для каждого спутника без коррекции вектора эксцентриситета, приводя тем самым к постоянству относительных векторов наклонения и эксцентриситета.
Второй вариант в отличие от первого предполагает отсутствие маневров, изменяющих вектора эксцентриситета. В этом случае размер кольцевой области допустимого изменения вектора эксцентриситета у каждого аппарата должен быть близок по среднему диаметру окружности естественного дрейфа. Посредством выбора начальных условий, напрямую зависящих от положения Солнца, можно добиться того, что движение вектора эксцентриситета будет осуществляться в пределах кольцевой области его допустимого изменения без проведения в дальнейшем дополнительных маневров. Параметры и положение кольцевых областей допустимого изменения векторов эксцентриситета и наклонения выбираются исходя из размеров широтных и долготных диапазонов и характеристик спутников. Целесообразность использования двигателей малой тяги, по сравнению с химическими двигателями, обусловлена высоким удельным импульсом (14000-25000 м/с), что приводит к значительной экономии топлива и соответственно к снижению массы спутника.
В дальнейшем изобретение поясняется описанием конкретных вариантов его выполнения и прилагаемыми чертежами и графиками, на которых:
фиг.1 изображает изменение вектора наклонения на годовом интервале при неуправляемом движении;
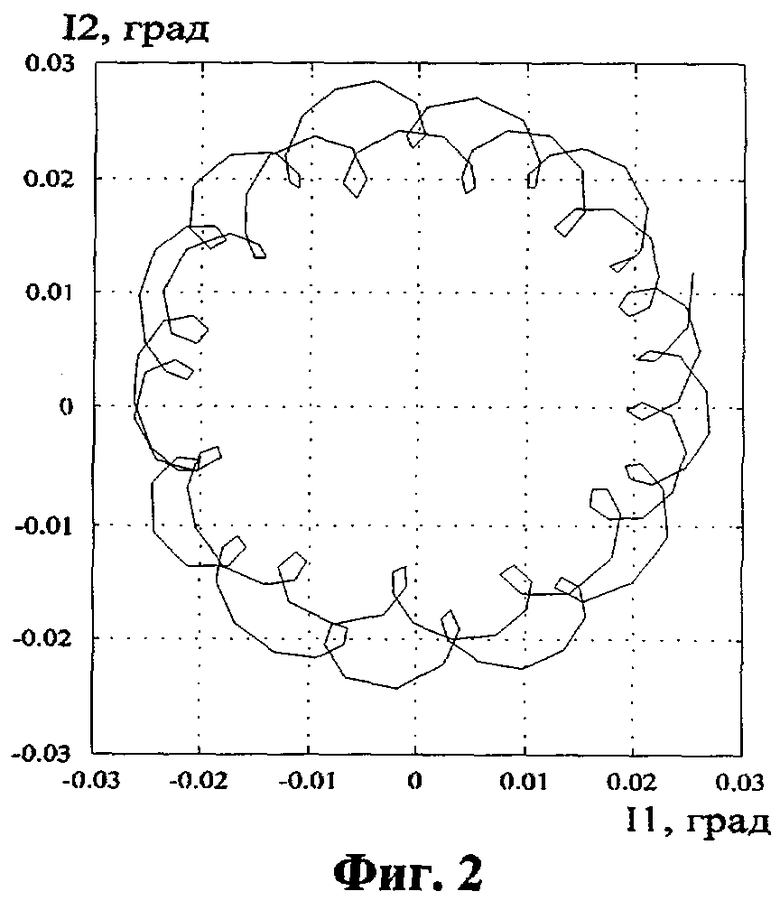
фиг.2 - изменение вектора наклонения на годовом интервале при управляемом движении;
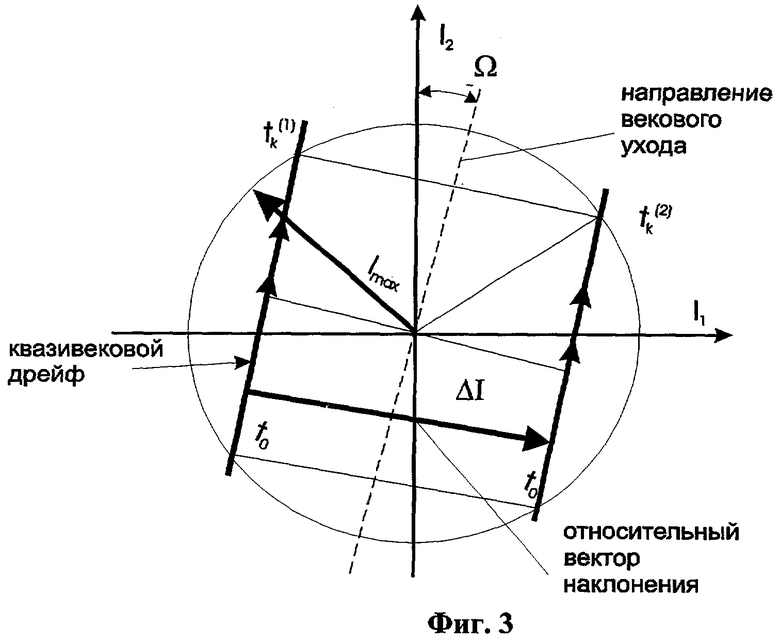
фиг.3 - изменение векторов наклонений двух спутников;
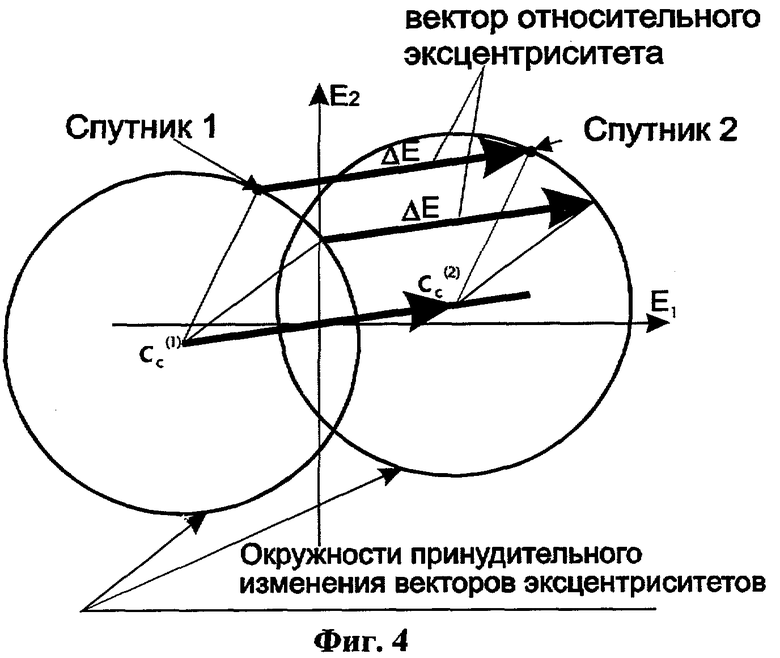
фиг.4 - изменение векторов эксцентриситетов двух спутников;
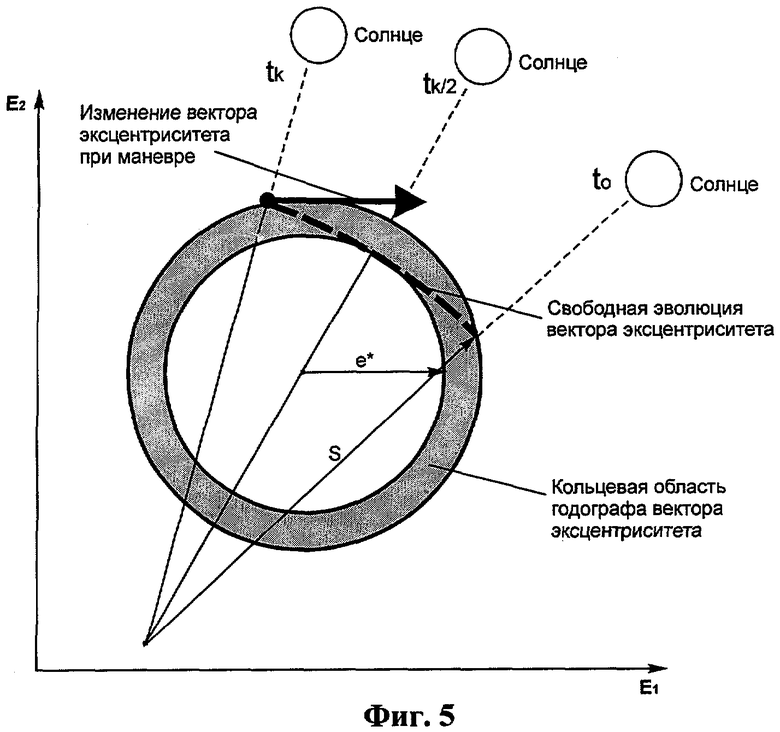
фиг.5 - схему коррекции векторов эксцентриситетов;
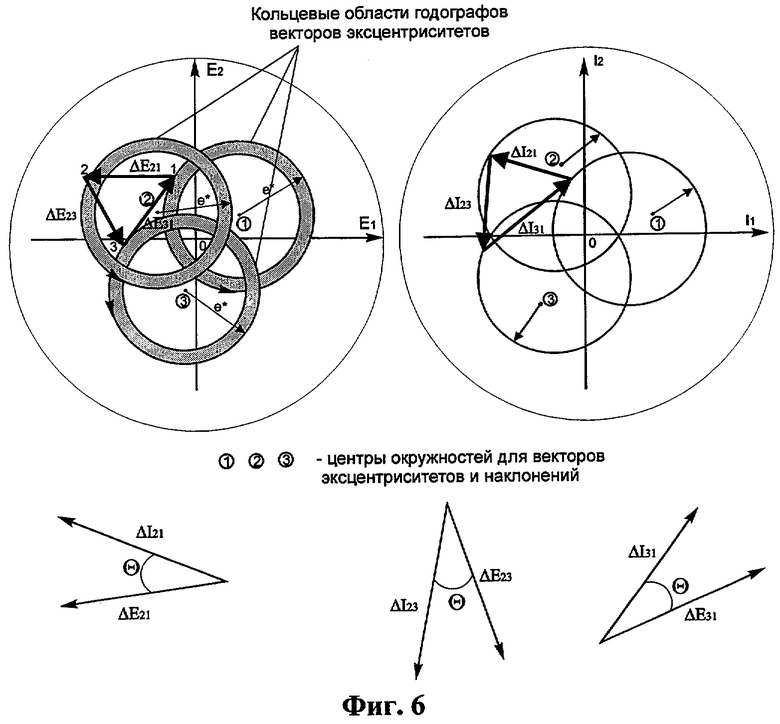
фиг.6 - схему синхронного изменения относительных векторов эксцентриситета и наклонений;
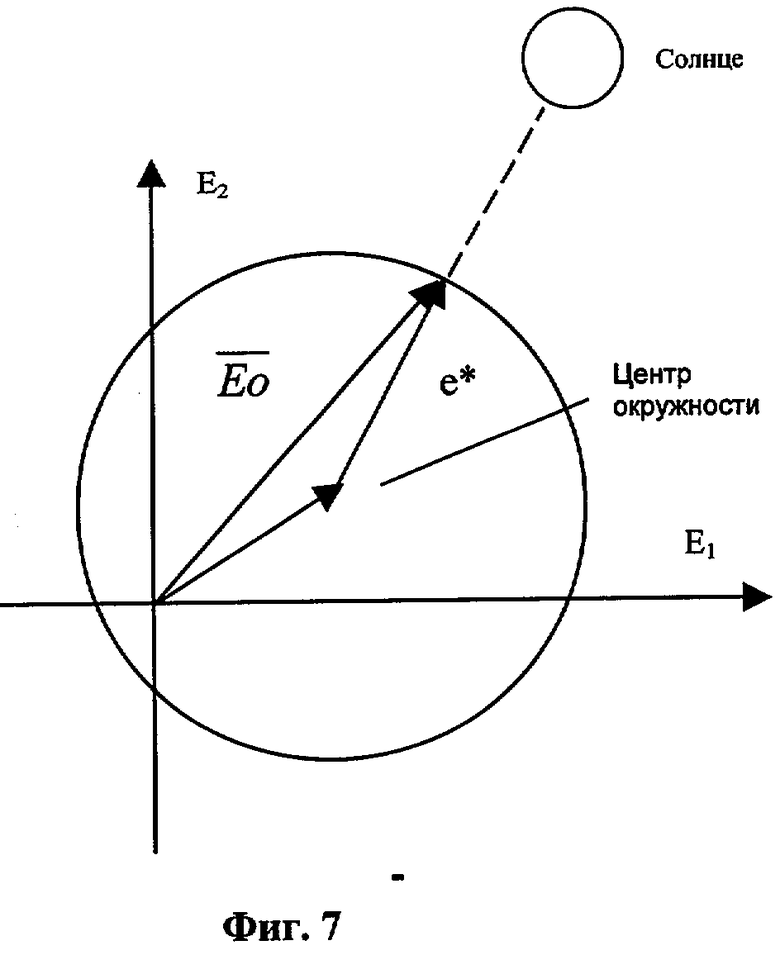
фиг.7 - выбор начального направления вектора эксцентриситета;
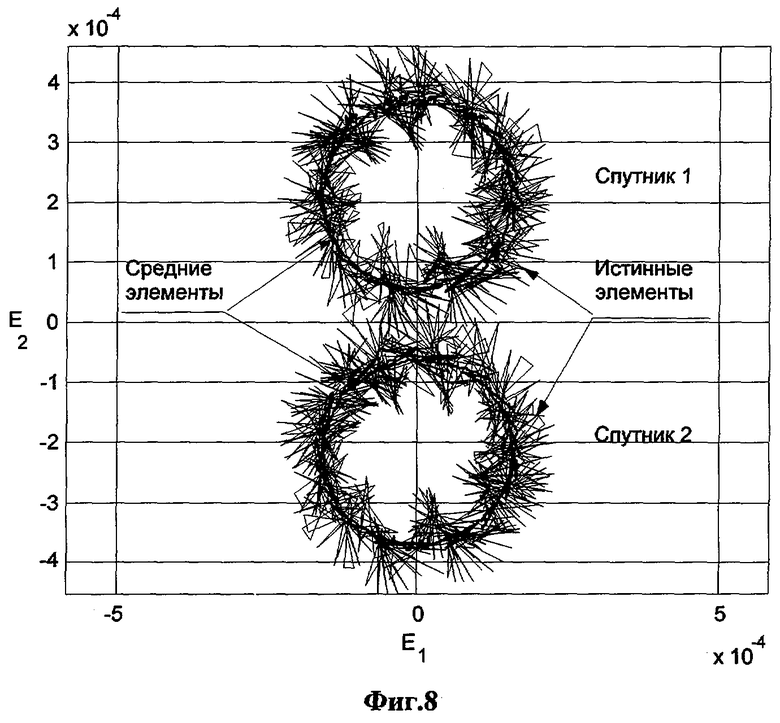
фиг.8 - эволюцию векторов эксцентриситета для двух спутников на годовом интервале;
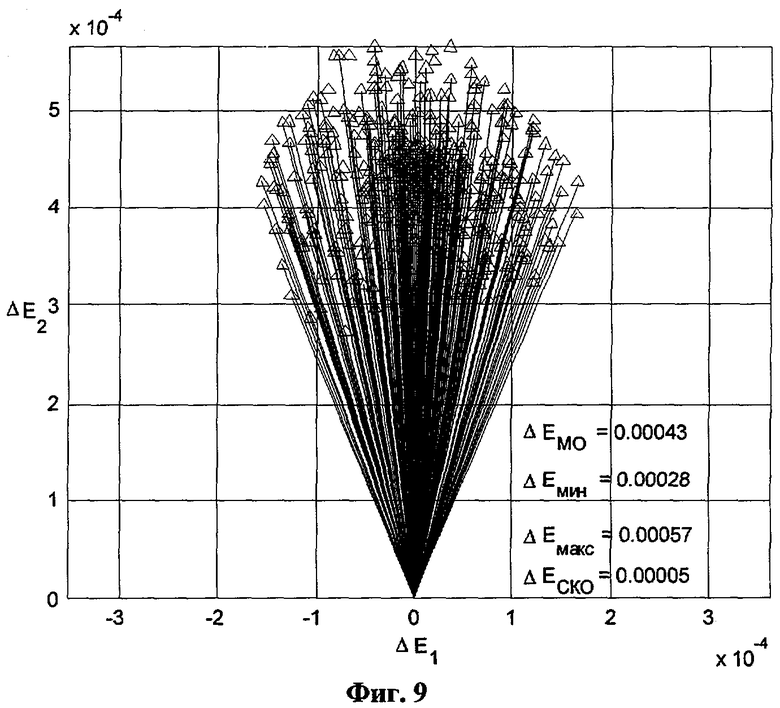
фиг.9 - изменение относительных векторов эксцентриситетов на годовом интервале;
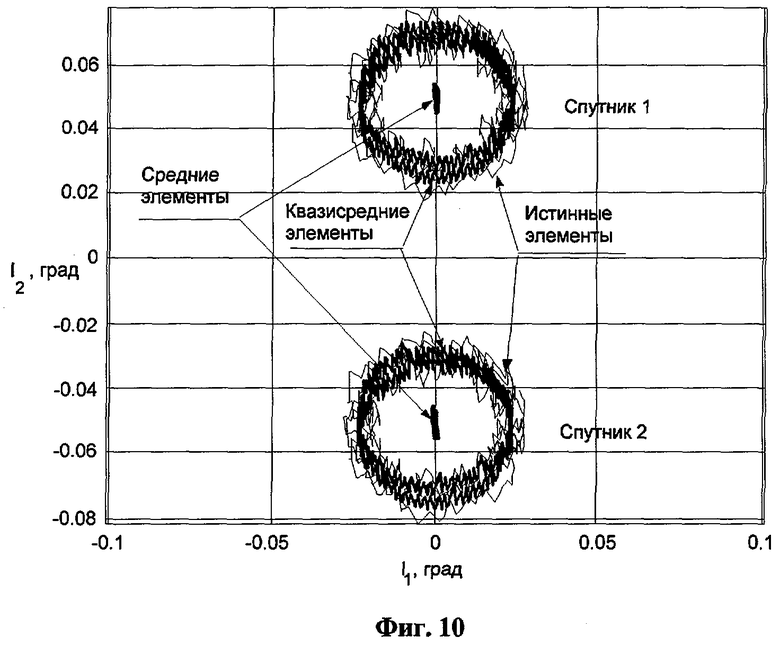
фиг.10 - эволюцию векторов наклонения для двух спутников на годовом интервале;
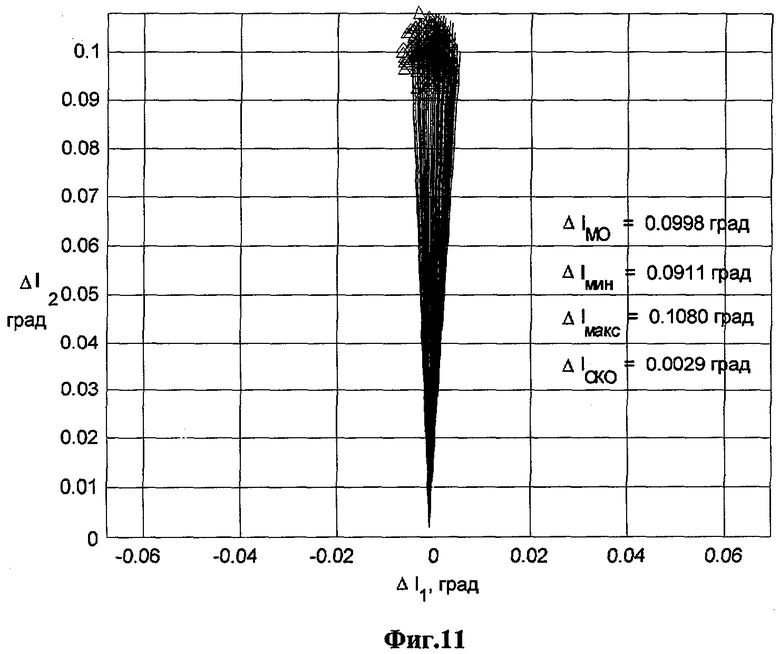
фиг.11 - изменение относительных векторов наклонения на годовом интервале;
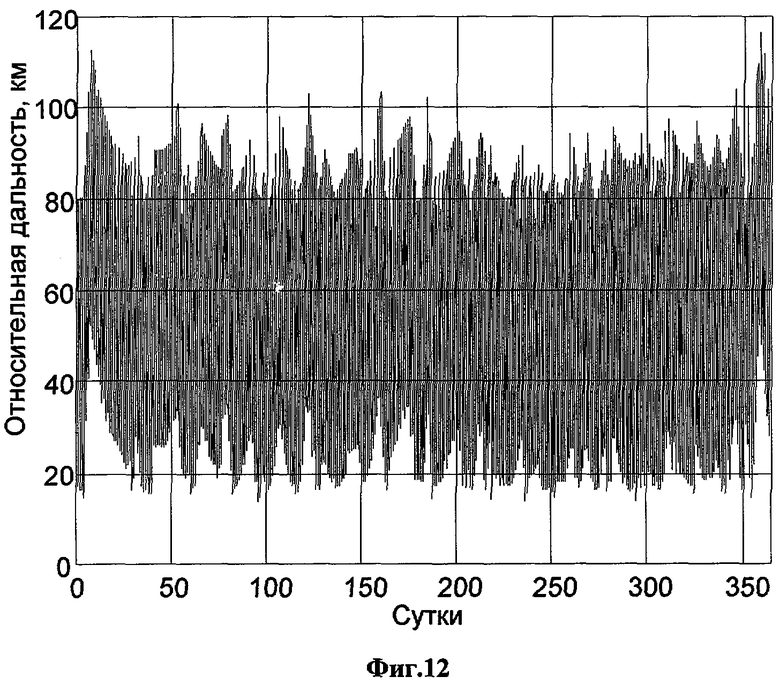
фиг.12 - изменение относительных дальностей между спутниками на годовом интервале;
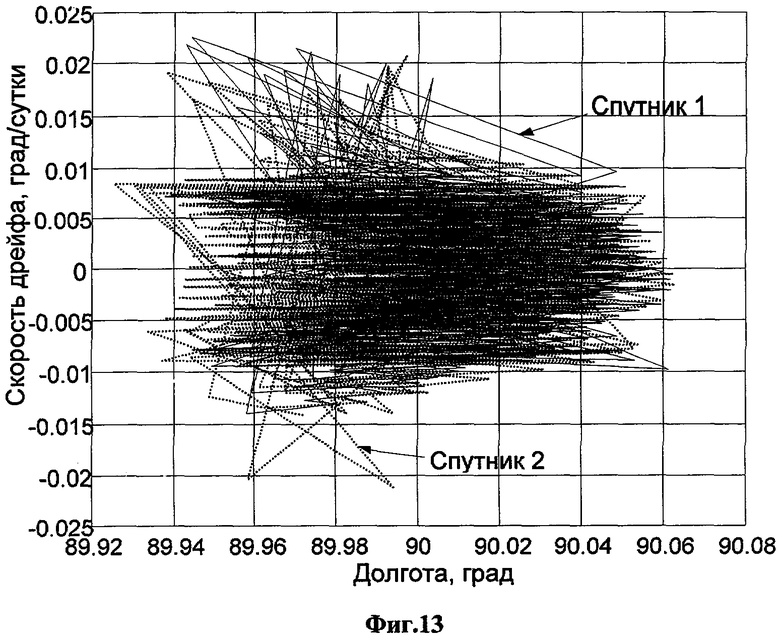
фиг.13 - фазовый портрет движения двух спутников (скорость дрейфа по долготе от значения средней географической долготы).
При этом на фиг.1-13 приняты следующие обозначения:
е* - радиус окружности свободной эволюции вектора эксцентриситета;
Е, E1, E2 - вектор эксцентриситета и его компоненты;
 - вектор направления на Солнце;
- вектор направления на Солнце;
I, I1, I2 - вектор наклонения и его компоненты;
ΔE, ΔI - разностные векторы эксцентриситета и наклонения;
S - радиус свободной эволюции вектора эксцентриситета;
t - время;
ϕ - угловое смещение Солнца за половину периода коррекции эксцентриситета;
Θ - угол между относительными векторами ΔE и ΔI.
Поставленная задача решается посредством проведения маневров, выполняемых двигателями малой тяги и приводящих к такому движению центров масс спутников, что эволюции векторов наклонения и эксцентриситета по годографам синхронизируются, а взаимная ориентация относительных векторов эксцентриситета и наклонения остается практически постоянной. Для обеспечения безопасного совместного полета кластера спутников на геостационарной орбите существенным является не сохранение абсолютных значений векторов эксцентриситетов и наклонений (т.е. сохранение формы и положения орбиты каждого спутника), а сохранение неизменными только относительных векторов наклонения и эксцентриситета. Это может быть достигнуто удержанием абсолютных значений орбитальных элементов спутников в узких пределах и как следствие их относительных векторов. Вместе с тем допустимо, если орбитальные элементы - вектора эксцентриситета и наклонения всех спутников имеют такие синхронные эволюции в долговременном масштабе, при которых неизменность относительных векторов сохраняется.
Характер возмущенного движения геостационарных спутников и методы управления одиночными спутниками хорошо известны. Наиболее существенным возмущением орбитальных элементов является квазивековое изменение наклонения, которое составляет ˜0.8-1.0 град/год (фиг.1). Около 90% расходов топлива на поддержание орбитальной позиции связано с необходимостью коррекции этого возмущения. Величина потребной характеристической скорости в год составляет ˜45-55 м/с. Коррекция вектора наклонения обеспечивается проведением маневров на одном или двух интервалах на витке. Середины этих интервалов располагаются на линии узлов целевой и исходной плоскостей орбит спутника. Направление суммарных отрабатываемых импульсов коррекции ортогональны плоскости орбиты и на антиподных участках витка (при двух интервалах маневрирования) противоположны.
Возможны три типа коррекций удержания вектора наклонения в заданных широтных пределах (перечислены в порядке увеличения затрат (топлива):
коррекция только квазивековой составляющей смещения вектора наклонения, т.е. среднего I (учет возмущений осредненных с периодом до одного года включительно);
частичная коррекция с компенсацией циклических возмущений вдоль направления векового смещения вектора наклонения, т.е. коррекция проекции квазисреднего I на направление среднего I (учет годовых и полугодовых возмущений);
максимальная коррекция, т.е. коррекция истинного I.
Наиболее эффективным методом коррекции наклонения является коррекция, компенсирующая только составляющую вектора наклонения, параллельную направлению векового ухода. При этом экономия топлива составит ˜10-25%. В таком случае вектор наклонения будет иметь циклическое изменение с полугодовым периодом и амплитудой ˜0.025 град. (фиг.2).
Для вектора эксцентриситета возможны следующие виды коррекций:
удержание модуля вектора эксцентриситета в заданных пределах;
переход на заданный прицельный вектор эксцентриситета;
принудительный дрейф вектора эксцентриситета по окружности заданного радиуса (т.е. в кольцевой области).
Средний расход топлива на эти коррекции эквивалентен ˜2 м/с характеристической скорости за год. Для управления положением спутника по долготе используется традиционный способ формирования фазовой кривой (см. Чернявский Г.М., Бартенев В.А. "Управление орбитой геостационарного спутника Земли", М. - Машиностроение, 1978) и коррекция долготы выполняется совместно с коррекцией эксцентриситета (A.Kamel and С.Wagner, "On the Orbital Eccentricity Control of Synchronous Satellites", Journal of the Astronautical Sciences, Vol.XXX, 1982, №1, pp.61-73).
В настоящее время для управления совместным безопасным полетом двух и более спутников в окрестности одной рабочей точки геостационарной орбиты используют разнесение векторов наклонений и эксцентриситетов смежных спутников и поддержание этих разностей в определенных пределах посредством выбора схемы проведения маневров. По физическому смыслу это означает, что вблизи линии узлов пересечений орбит спутников их разносят по высоте, а вблизи линии равных высот их разносят в боковом по отношению к плоскостям орбит направлении, что исключает опасное сближение спутников в относительном движении. Кроме того, спутники должны удерживаться в рабочей точке с определенной в тактико-техническом задании точностью по широте и долготе.
Традиционным способом реализации управления совместным движением двух спутников в окрестности одной точки геостационарной орбиты является периодическая коррекция истинного вектора наклонения или частичная коррекция этого вектора с компенсацией периодических возмущений вдоль направления векового смещения вектора наклонения. Коррекция вектора эксцентриситета проводится таким образом, чтобы его годограф представлял собой окружность с годичным периодом движения по ней. На спутниках с относительно большой тягой маневры на изменение наклонения (определяющие около 90% всех затрат топлива на удержание в рабочей точке геостационарной орбиты) проводятся с периодичностью от 2 до 6 недель характеристическая скорость каждого маневра ˜2-10 м/с. При этом вектор наклонения получает значительное смещение и поэтому такая процедура должна проводиться согласованно по времени на всех спутниках для уменьшения поворота относительного вектора наклонения. Как указывалось выше, самым экономичным способом коррекции вектора наклонения является устранение вековой составляющей, что приводит к остаточной эволюции вектора наклонения (см. фиг.2), в основном, близко к окружности радиусом ˜0.025(с полугодовым периодом. Размеры этой окружности сравнимы с размерами области удержания спутника в рабочей точке по долготе и широте (как правило, это ±0.05°...0.1°). Поэтому такую коррекцию (т.е. устранение только векового возмущения) при совместном управлении спутниками, как правило, не используют, поскольку при несогласованных положениях спутников в части полугодовых возмущающих членов векторов наклонения их различие может составить ˜0.05°. Однако специальным выбором начальных положений векторов наклонения спутников и при малой периодичности проведения коррекций наклонения (т.е. на спутниках с относительно малой тягой) можно обеспечить при коррекции только вековой части (см. фиг.3) их синфазную эволюцию векторов наклонения по окружностям радиусом ˜0.025 таким образом, что вектор их разности будет сохранять близкое к постоянному направление. При проведении маневров коррекции наклонения в силу их небольшой величины относительный вектор наклонения практически не будет поворачиваться. Кроме того, с практической точки зрения, весьма важным является отсутствие необходимости согласования моментов проведения коррекции на спутниках.
Схема выбора и коррекции векторов эксцентриситета приведена на фиг.4. Благодаря смещению центров окружностей принудительного движения (радиуса е*) в требуемом направлении относительно вектора разности наклонений (ΔI) и организации посредством маневров двигателями малой тяги синфазного движения по этим окружностям, линия равных высот будет практически неподвижна. Если радиус е* равен радиусу S окружности, соответствующей свободной эволюции вектора эксцентриситета, вызываемого давлением солнечного света, то для стабилизации направления этой линии коррекции не требуется, т.к. синфазное движение по любым одинаковым траекториям обеспечивает стабильность направления, заданного начальной выставкой. В случае если e*<S, что возможно из-за ограничений величины эксцентриситета, то потребуются специальные коррекции вектора эксцентриситета и соответствующие расходы рабочего тела.
Для проведения коррекций эксцентриситета может быть принята схема, приведенная на фиг.5. Согласно ей каждый маневр переводит вектор эксцентриситета в положение, из которого при естественном дрейфе (за счет давления солнечного света) годограф вектора коснется окружности его принудительного изменения примерно в середине планируемого интервала времени пассивного (по эксцентриситету) полета. Таким образом, годограф вектора эксцентриситета будет находиться внутри кольцевой области.
Схема синхронного изменения относительных векторов эксцентриситета и наклонения на примере кластера из трех спутников показана на фиг.6. Видно, что в случае движения годографов векторов по окружностям углы между относительными векторами ΔЕ и ΔI остаются практически постоянными и приблизительно равными заданному углу Θ. Для обеспечения подобной синхронной эволюции векторов эксцентриситета и наклонения на начальный момент они должны быть сформированы таким образом, что линия, соединяющая центр окружности вектора эксцентриситета с начальной точкой  была направлена на Солнце, а линия относительного вектора наклонения образовывала с вектором эксцентриситета заданный угол.
была направлена на Солнце, а линия относительного вектора наклонения образовывала с вектором эксцентриситета заданный угол.
В качестве примера выбраны следующие значения: координаты центров окружностей эволюции годографов векторов эксцентриситетов 1 спутника (0,2·10-4), 2 спутника (0, -2·10-4), е*=1.5·10-4, координаты центров окружностей эволюции годографов векторов наклонения 1 спутника (0, 0.045°), 2 спутника (0, 0.045°). Приняты θ=0, а периодичность коррекции эксцентриситета в соответствии с практикой принята равной 25 дней, что соответствует смещению положения Солнца ˜25°. Таким образом ϕ˜12.5°. На фиг.8-13 представлены результаты моделирования долговременного полета двух геостационарных спутников в одном и том же долготном и широтном диапазонах ±0.1 град. на годовом интервале: изменение абсолютных векторов эксентриситетов (фиг.8) относительно векторов эксцентриситетов (фиг.9), абсолютных векторов наклонения (фиг.10), относительного вектора эксцентриситета наклонения (фиг.11). Изменение относительного расстояния между спутниками показано на фиг.12, а их средних географических долгот - на фиг.13. Относительные расстояния между спутниками изменялись в пределах 18-110 км. Взаимная ориентация относительных векторов эксцентриситета и наклонения сохраняется с погрешностью ±8-12°, т.е. не хуже чем значение угла ϕ. Моделирование полета спутников выполнялось в точной постановке с учетом нецентральности гравитационного поля Земли, притяжения Солнца и Луны, давления солнечного света. Учитывались также ошибки определения орбит и исполнения маневров. Результаты моделирования подтверждают техническую реализуемость предлагаемого способа управления кластером спутников.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2559371C2 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2013 |
|
RU2535353C2 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ УВОДА ПРЕКРАТИВШИХ АКТИВНОЕ СУЩЕСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ С РАБОЧИХ НАКЛОННЫХ И ЭКВАТОРИАЛЬНЫХ ОРБИТ В ПЛОТНЫЕ СЛОИ АТМОСФЕРЫ | 2018 |
|
RU2708406C1 |
Изобретения относятся к управлению группировками спутников, размещенных в одних и тех же или пересекающихся долготных и широтных диапазонах геостационарной орбиты. Предлагаемый способ заключается в измерении параметров орбит спутников, определении по ним орбитальных элементов, сравнении их с требуемыми и проведении корректирующих маневров с помощью двигателей малой тяги. При этом переводят векторы наклонения спутников в разнесенные друг от друга кольцевые области их допустимого изменения так, чтобы угол между линией, соединяющей конец вектора с центром его кольцевой области, и направлением на Солнце был на 180° больше прямого восхождения Солнца. По первому варианту способа векторы эксцентриситета спутников переводят в аналогичные кольцевые области так, чтобы аналогичная линия отставала от направления на Солнце наполовину углового перемещения вектора по окружности его естественного дрейфа в пределах кольцевой области. Далее изменяют расстояния между спутниками в требуемых пределах, компенсируя квазивековое приращение вектора наклонения и корректируя вектор эксцентриситета так, что при прохождении этим вектором середины интервала между точкой входа окружности его естественного дрейфа в его кольцевую область и точкой выхода из этой области линия, соединяющая центр данной окружности и центр кольцевой области, совпадала с направлением на Солнце. Если кольцевая область допустимого изменения каждого вектора эксцентриситета близка к окружности его естественного дрейфа (второй вариант), то указанную выше линию для этой области совмещают с направлением на Солнце, и в дальнейшем коррекцию этих векторов не проводят. Технический результат изобретений состоит в экономии затрат топлива на коррекцию, не требующую согласованного ее проведения для всех спутников, и в обеспечении их долговременного полета на безопасных расстояниях. 2 н.п. ф-лы. 13 ил.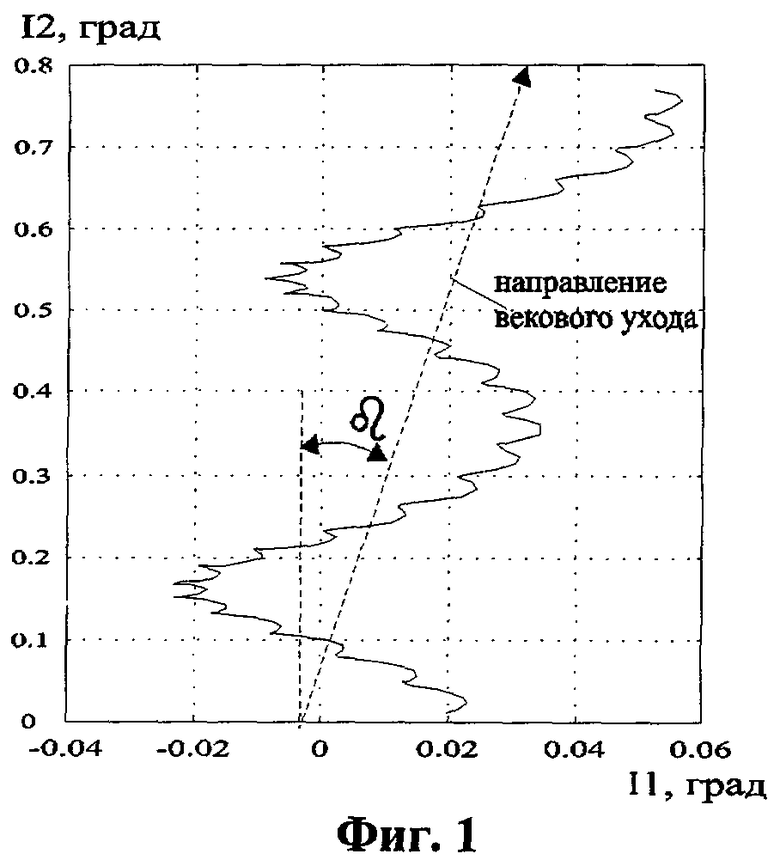
| PATTINSON L | |||
| EUTELSAT satellite collocation | |||
| AIAA Paper | |||
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| US 5506780 A, 09.04.1996 | |||
| US 5120007 A, 09.06.1992 | |||
| СПОСОБЫ РАБОТЫ СПУТНИКОВОЙ КОММУНИКАЦИОННОЙ СИСТЕМЫ, СПОСОБ УПРАВЛЕНИЯ ЕЕ РАБОТОЙ И СИСТЕМА УПРАВЛЕНИЯ СПУТНИКОВЫМ АНТЕННЫМ ОХВАТОМ НЕГЕОСТАЦИОНАРНОЙ ОРБИТАЛЬНОЙ МНОГОСПУТНИКОВОЙ СИСТЕМЫ | 1992 |
|
RU2121225C1 |
| А.В.АНДРЕЕВ, В.И.КУРКИН | |||
| Геосинхронные телекоммуникационные системы спутников на орбитах с "соударениями" | |||
| Труды Московского технического университета связи и информатики | |||
| - М., 2004, с.28-34. | |||

