Область техники, к которой относится настоящее изобретение.
Настоящее изобретение относится к гидравлическому ударному устройству и к оснащенному им строительному оборудованию, а более конкретно, к гидравлическому ударному устройству, длина хода которого регулируется в соответствии с состоянием дробления, и к оснащенному им строительному оборудованию.
Предшествующий уровень техники настоящего изобретения .
Отбойный молоток - это устройство, используемое для дробления горной породы и тому подобное путем дробления объекта долотом, и гидравлический отбойный молоток навесного типа, установленный на тяжелой строительной технике, такой как экскаватор, в основном используется на большой строительной площадке и тому подобное.
В работах по дроблению горной породы скорость работы является одним из важных факторов из-за предельных сроков строительства. Таким образом, режим обычного отбойного молотка переключается в соответствии с действиями оператора между режимом длинного хода, имеющим большую длину хода поршня для увеличения силы дробления при дроблении твердой породы, и режимом короткого хода, в котором скорость дробления увеличена, хотя сила дробления несколько уменьшена.
Однако, поскольку обычный отбойный молоток полностью зависит от произвольного решения оператора по выбору режима, неквалифицированному человеку трудно использовать отбойный молоток, и трудно управлять отбойным молотком при частом переключении режима.
Техническая Задача
Настоящее изобретение направлено на создание гидравлического ударного устройства, длина хода которого регулируется в соответствии с состоянием дробления, и на создание оснащенного им строительного оборудования.
Цель, которая должна быть достигнута с помощью изобретения, не ограничена вышеописанной целью, и другие цели, которые не описаны, будут понятны специалистам в данной области техники из следующих описаний и прилагаемых фигур.
Техническое решение
Согласно одному аспекту настоящего изобретения представлено ударное устройство, которое дробит объект, причем устройство содержит: цилиндр для размещения поршня; поршень для возвратно-поступательного движения в цилиндре; отверстие обратного хода для соединения передней камеры, расположенной на передней стороне цилиндра, с гидравлическим источником; отверстие прямого хода, образованное в задней камере, расположенной на задней стороне цилиндра; клапан прямого и обратного хода для управления движением вперед и движением назад поршня путем его расположения в одном из положения прямого хода для соединения отверстия прямого хода с гидравлическим источником и побуждения поршня двигаться вперед, и положения обратного хода для соединения отверстия прямого хода с гидравлическим выпускным трубопроводом и побуждения поршня двигаться назад; трубопровод управления для перемещения клапана прямого и обратного хода в положение прямого хода при подключении к гидравлическому источнику; отверстие длинного хода для соединения гидравлического источника с трубопроводом управления через заднюю камеру, когда поршень перемещается назад в первое положение, причем отверстие длинного хода образовано между отверстием обратного хода и отверстием прямого хода и соединено с трубопроводом управления; отверстие короткого хода, соединенное с гидравлическим источником через заднюю камеру при движении поршня во второе положение, которое ближе к передней стороне цилиндра, чем первое положение, причем отверстие короткого хода образовано между отверстием обратного хода и отверстием длинного хода и соединено с трубопроводом управления; передаточный клапан, расположенный между отверстием короткого хода и трубопроводом управления и устанавливаемый в одно из положения длинного хода для отсоединения отверстия короткого хода от трубопровода управления и положения короткого хода для соединения отверстия короткого хода с трубопроводом управления; датчик приближения для определения нижней мертвой точки поршня, когда цель дроблена; и контроллер, выполненный с возможностью: определения состояния дробления на основании обнаруженной нижней мертвой точки и передачи управляющего сигнала в передаточный клапан на основании определенного состояния дробления, причем, когда передаточный клапан находится в положении длинного хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается в первое положение и работает в режиме длинного хода, а когда передаточный клапан находится в положении короткого хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается во второе положение, в котором поршень находится перед возвращением в первое положение, и работает в режиме короткого хода, который короче длинного хода.
Согласно другому аспекту настоящего изобретения представлено ударное устройство, выполненное в виде отбойного молотка, оборудованного на конце стрелы или рычага экскаватора для дробления горной породы, причем устройство содержит: цилиндр; поршень для возвратно-поступательного перемещения в цилиндре; долото для дробления породы за счет возвратно-поступательного движения поршня; электромагнитный клапан для регулирования положения прямого хода, при котором гидравлическое давление для направления усилия прямого хода на поршень прикладывается либо в первом положении цилиндра, либо во втором положении, обратном первому положению; датчик приближения для определения нижней мертвой точки поршня, когда горная порода дроблена; контроллер, выполненный с возможностью: определения характеристик горной породы на основе обнаруженной нижней мертвой точки и передачи электронного сигнала для управления электромагнитным клапаном в соответствии с характеристиками горной породы.
Согласно еще одному аспекту настоящего изобретения представлено ударное устройство, содержащее: поршень для возвратно-поступательного движения и остановки долота, которое дробит объект; датчик приближения для определения нижней мертвой точки для поршня, когда поршень останавливает долото; электромагнитный передаточный клапан для регулирования возвратно-поступательного движения поршня в режиме длинного хода или в режиме короткого хода; и контроллер, выполненный с возможностью: генерирования сигнала рабочего цикла на основе обнаруженной нижней мертвой точки и непрерывного переключения возвратно-поступательного движения между режимом длинного хода и режимом короткого хода, так что электромагнитный передаточный клапан выполняет режим длинного хода и режим короткого хода с временным разделением, используя рабочий цикл.
Согласно еще одному аспекту настоящего изобретения представлено строительное оборудование, содержащее: описанное выше ударное устройство; и экскаватор, оснащенный ударным устройством.
Решение проблемы настоящего изобретения не ограничено вышеописанными решениями, и решение, которое не описано, станет очевидным для специалистов в данной области техники из описания и прилагаемых фигур.
Полезные результаты
Согласно настоящему изобретению длина хода регулируется в соответствии с состоянием дробления, и, таким образом, длина хода может устанавливаться автоматически без отдельной регулировки, когда рабочий дробит твердую или мягкую породу.
Результат изобретения не ограничен вышеописанным эффектом, и другие результаты, которые не описаны, будут понятны специалистам в данной области техники из следующих описаний и прилагаемых фигур.
Краткое описание фигур
На Фиг. 1 представлен схематичный вид строительного оборудования согласно варианту осуществления настоящего изобретения.
На Фиг. 2 представлен схематичный вид ударного устройства согласно варианту осуществления настоящего изобретения.
На Фиг. 3 представлено ударное устройство в разобранном виде в перспективе согласно варианту осуществления настоящего изобретения.
На Фиг. 4 представлен первый пример принципиальной схемы ударного устройства согласно варианту осуществления настоящего изобретения.
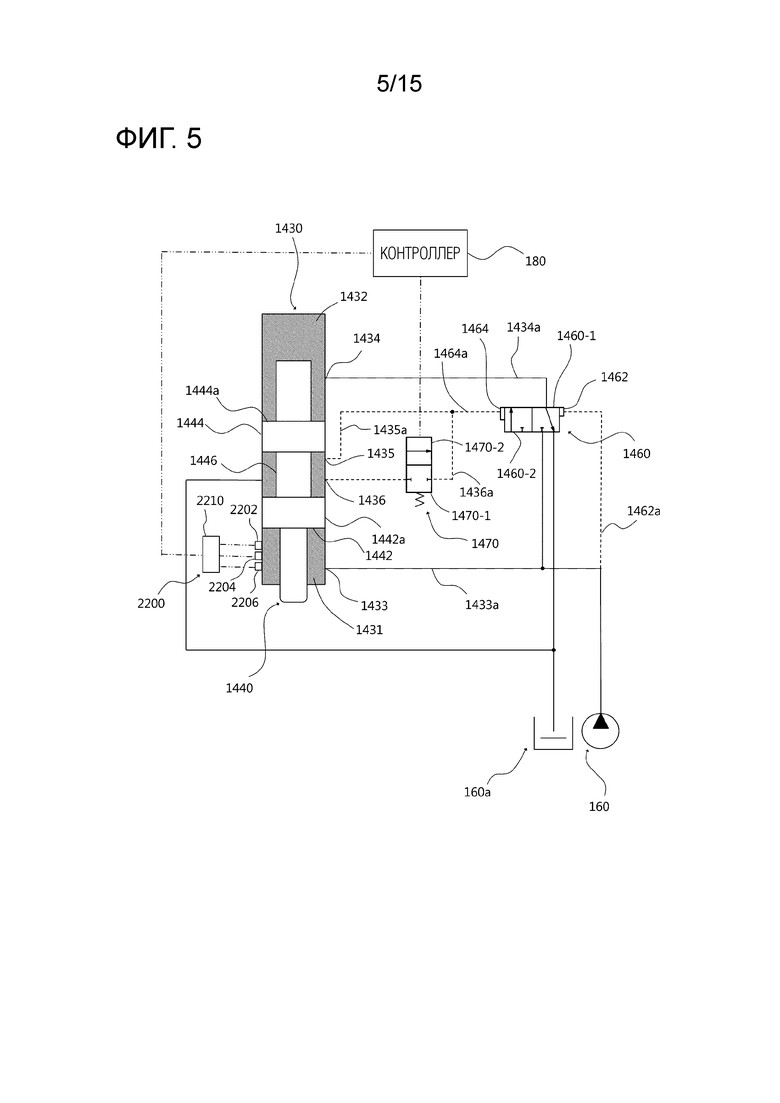
На Фиг. 5 представлен второй пример принципиальной схемы ударного устройства согласно варианту осуществления настоящего изобретения.
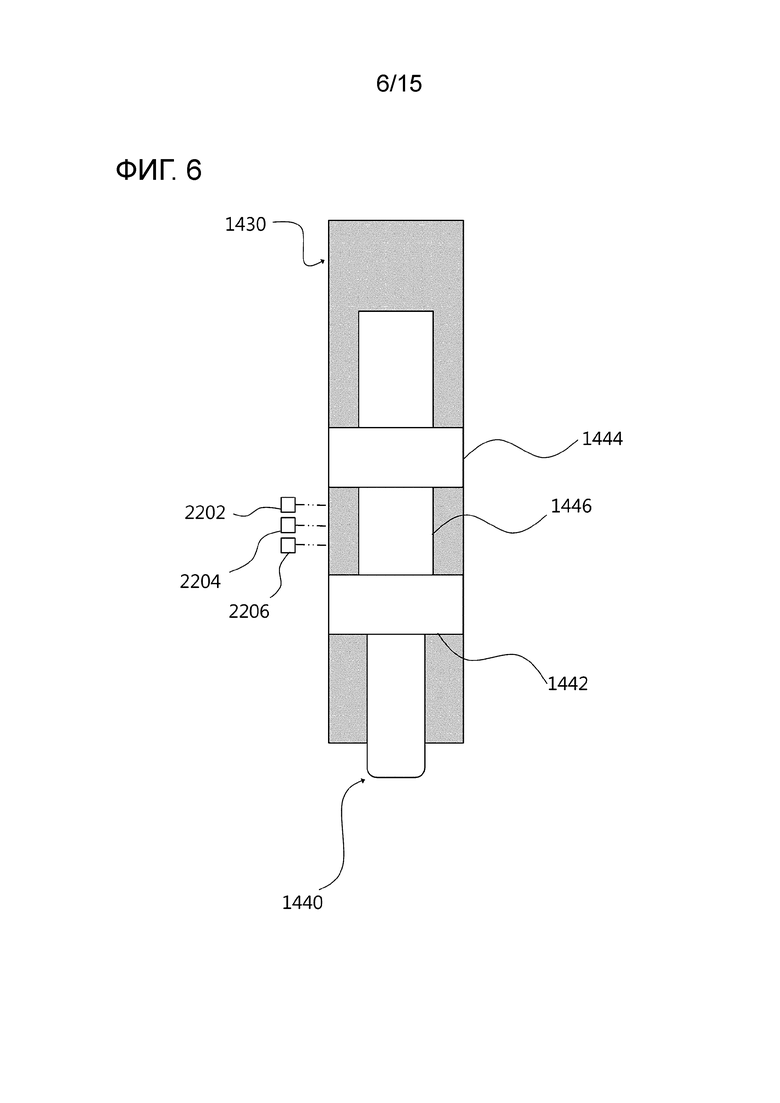
На Фиг. 6 представлен вид примера расположения датчика приближения согласно варианту осуществления настоящего изобретения.
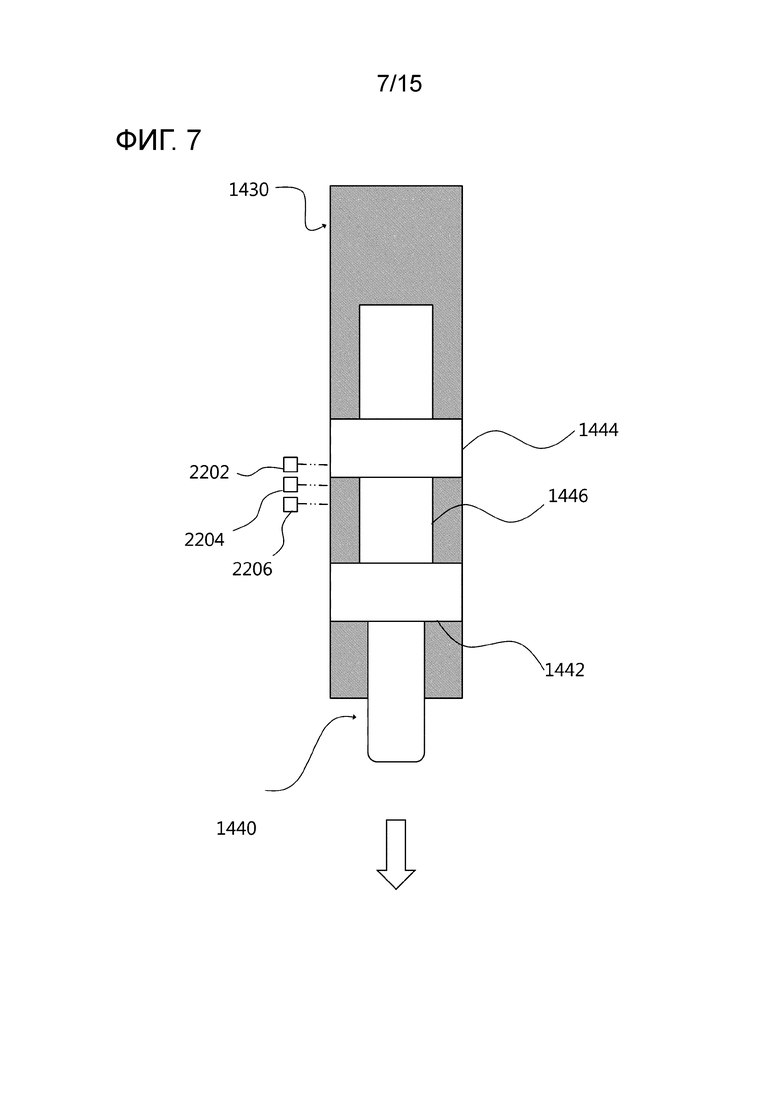
На Фиг. 7 представлен вид, иллюстрирующий нижнюю мертвую точку поршня, когда твердая порода дроблена, в состоянии, в котором датчик приближения расположен в соответствии с Фиг. 6.
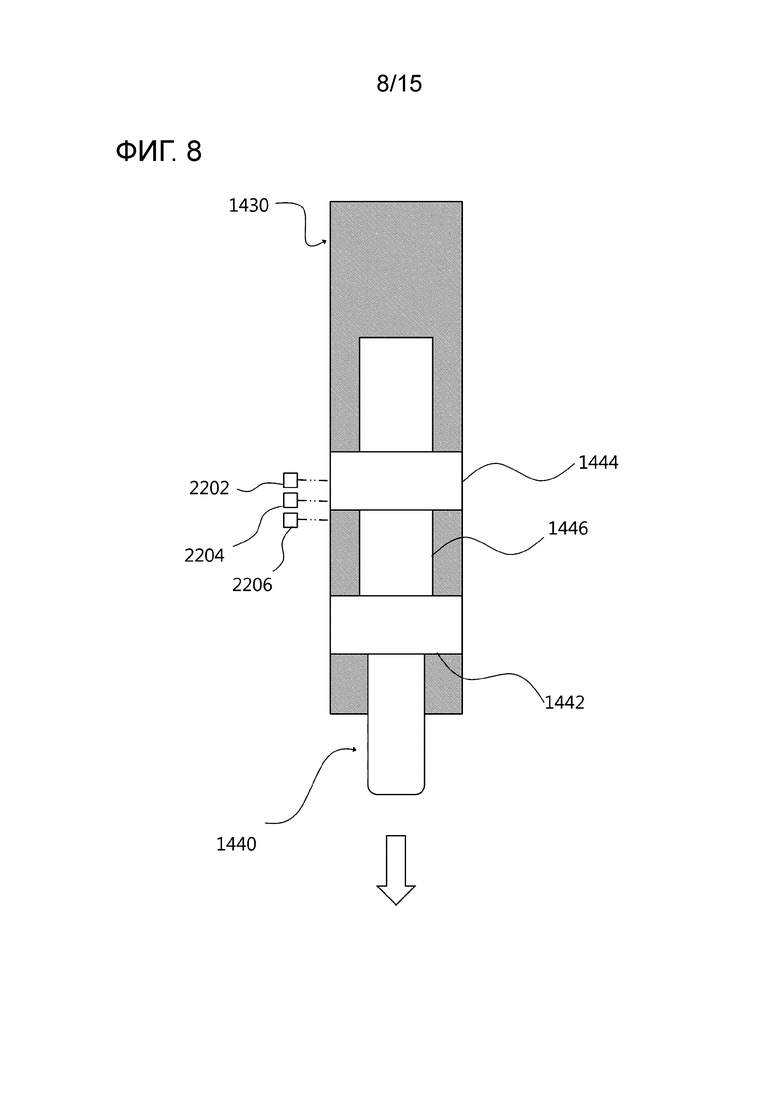
На Фиг. 8 представлен вид, иллюстрирующий нижнюю мертвую точку поршня, когда средняя порода дроблена, в состоянии, в котором датчик приближения расположен в соответствии с Фиг. 6.
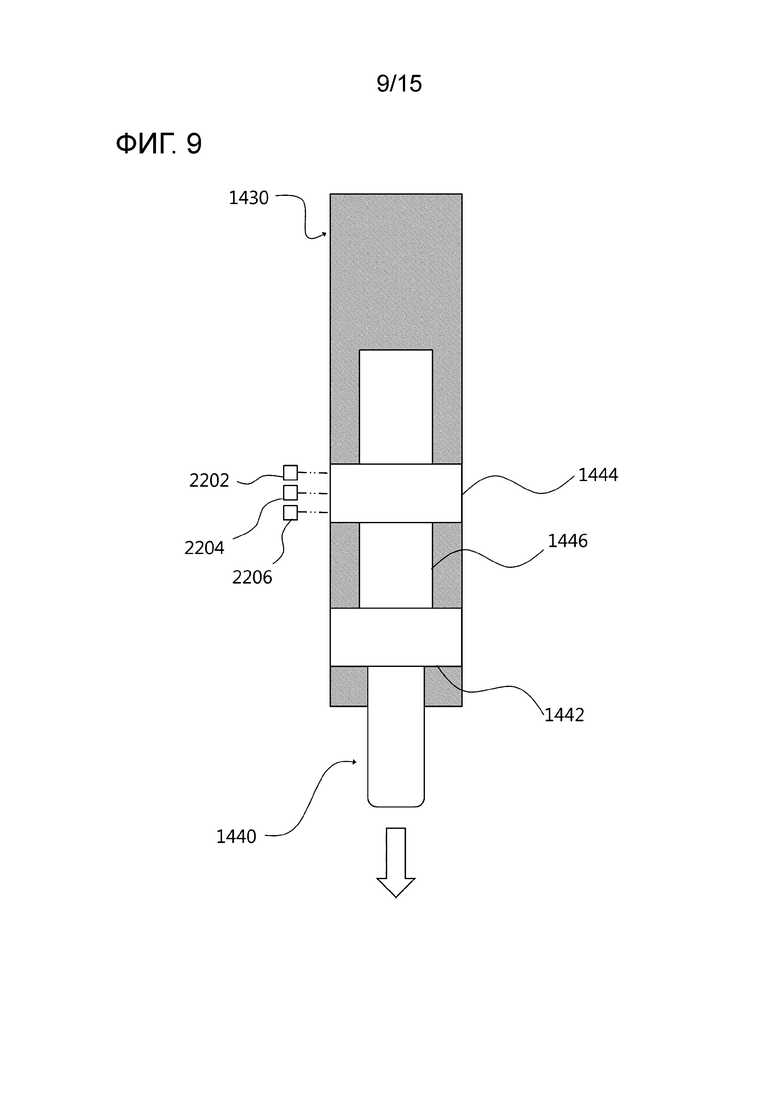
На Фиг. 9 представлен вид, иллюстрирующий нижнюю мертвую точку поршня, когда мягкая порода дроблена, в состоянии, в котором датчик приближения расположен в соответствии с Фиг. 6.
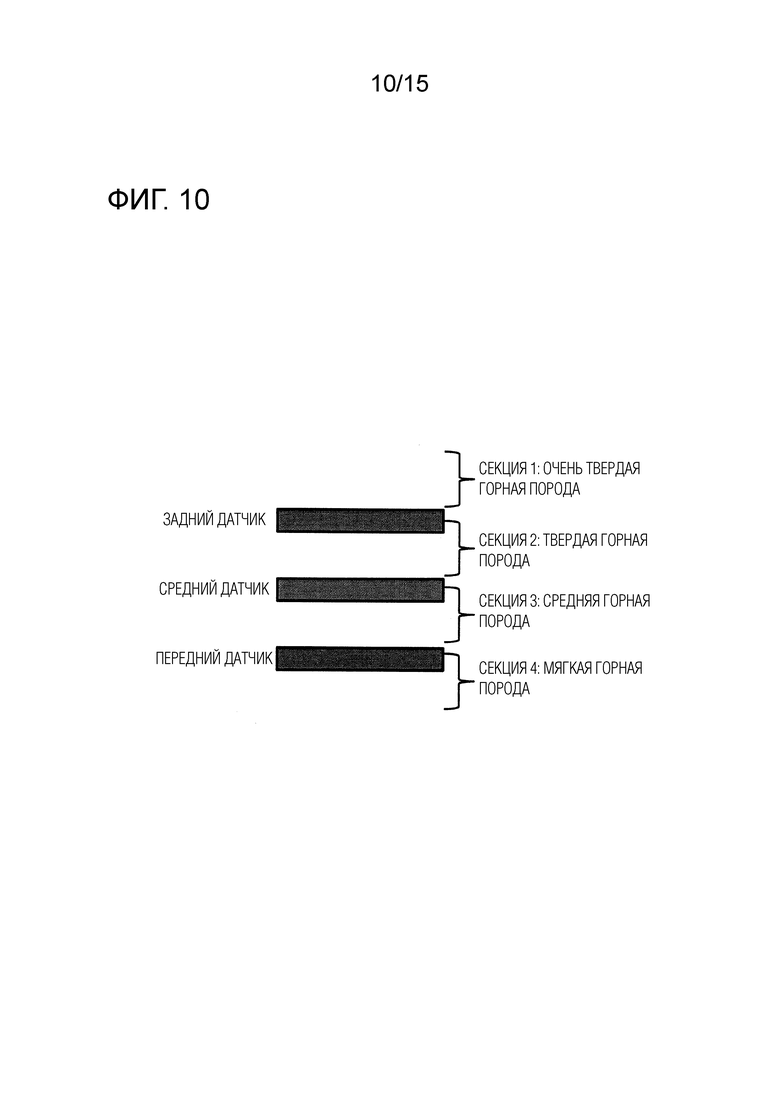
На Фиг. 10 представлен вид, иллюстрирующий секции распознавания в соответствии с твердостью разрушаемого объекта датчика приближения, расположенного в соответствии с Фиг. 6.
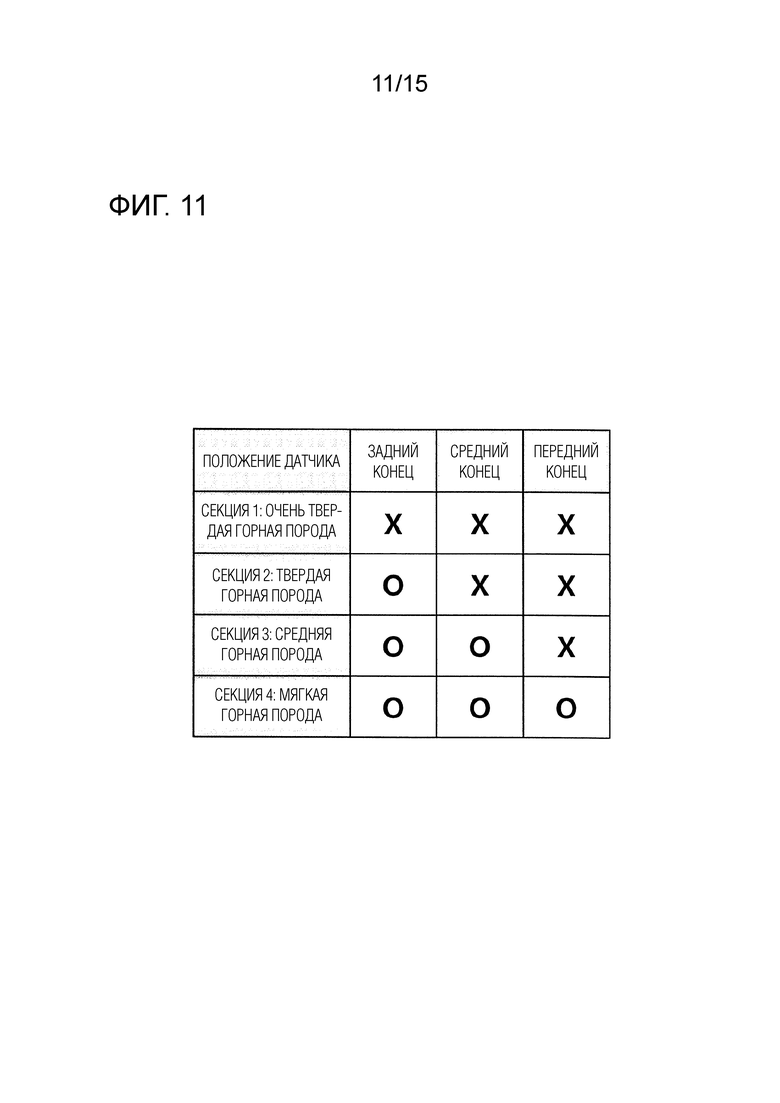
На Фиг. 11 представлена таблица для определения твердости разрушаемого объекта в соответствии с результатом обнаружения датчика приближения, расположенного в соответствии с Фиг. 6.
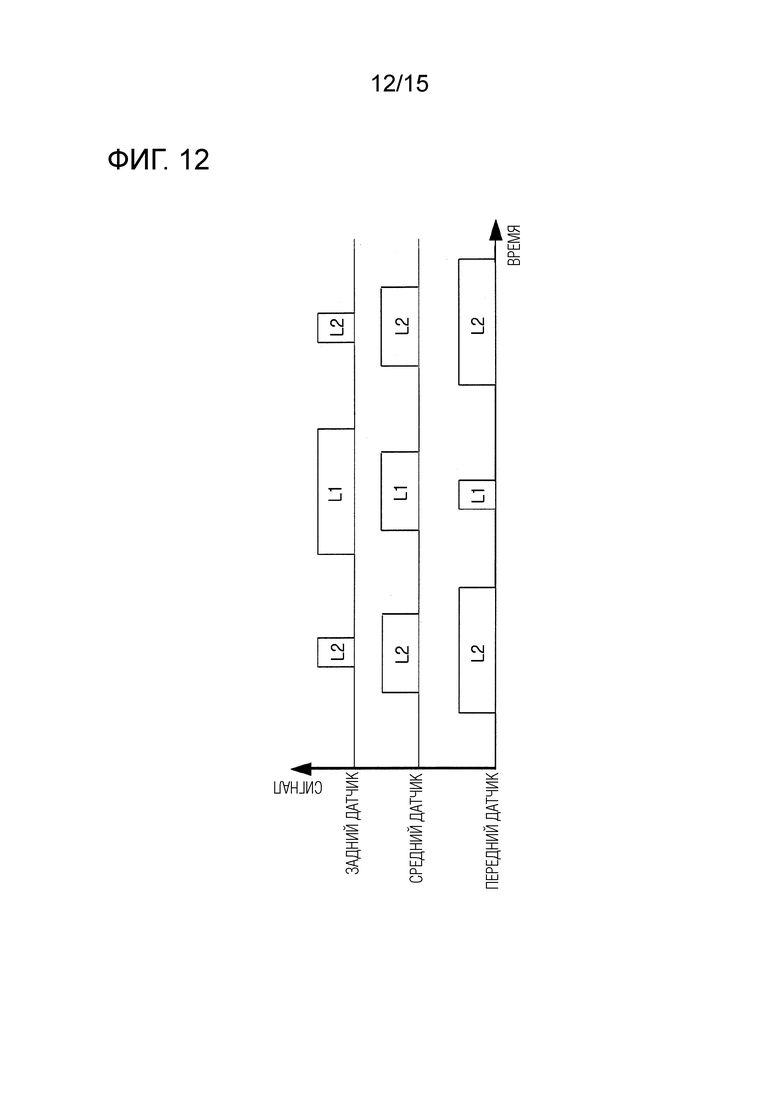
На Фиг. 12 представлен график, иллюстрирующий сигнал датчика приближения, когда мягкая порода дроблена, в состоянии, в котором датчик приближения расположен согласно Фиг. 6.
На Фиг. 13 представлен график, иллюстрирующий сигнал датчика приближения, когда твердая порода или средняя порода дроблена, в состоянии, в котором датчик приближения расположен согласно Фиг. 6.
На Фиг. 14 представлен вид сигнала включения/выключения контроллера согласно варианту осуществления настоящего изобретения.
На Фиг. 15 представлен вид сигнала синхронизации для трехступенчатой или более или бесступенчатой передачи согласно варианту осуществления настоящего изобретения.
Наилучший вариант осуществления изобретения
Поскольку варианты осуществления, изложенные в данном описании, предназначены для ясного описания концепции настоящего изобретения специалистам в данной области техники, настоящее изобретение не ограничено настоящим вариантом осуществления, изложенным в описании, и следует понять, что объем настоящего изобретения включен в модифицированный пример без отхода от сущности настоящего изобретения.
Термины, используемые в этом описании, выбраны из широко используемых в настоящее время общих терминов с учетом функций настоящего изобретения, но могут изменяться в зависимости от намерений или опыта специалистов в данной области техники или с появлением новой технологии. Однако, когда конкретные термины определены и используются с произвольными значениями, значения этих терминов раскрываются отдельно. Следовательно, термины, используемые в данном описании, следует интерпретировать на основе реальных значений, которые имеют термины, и содержания через это описание изобретения, а не простых названий терминов.
Фигуры, прилагаемые к настоящему описанию, предназначены для легкого описания настоящего изобретения, и формы, показанные на фигурах, могут быть преувеличенно проиллюстрированы, насколько это необходимо для облегчения понимания настоящего изобретения, и, следовательно, настоящее изобретение не ограничено фигурами.
В настоящем описании определено, что если подробное описание соответствующей известной функции или конфигурации излишне затеняет важный момент настоящего изобретения, такое подробное описание будет опущено.
Согласно одному аспекту настоящего изобретения представлено ударное устройство, которое дробит объект, причем устройство содержит: цилиндр для размещения поршня; поршень для возвратно-поступательного движения в цилиндре; отверстие обратного хода для соединения передней камеры, расположенной на передней стороне цилиндра, с гидравлическим источником; отверстие прямого хода, образованное в задней камере, расположенной на задней стороне цилиндра; клапан прямого и обратного хода для управления движением поршня вперед и движением поршня назад путем расположения в одном из положения прямого хода для соединения отверстия прямого хода с гидравлическим источником и побуждения поршня двигаться вперед, и положения обратного хода для соединения отверстия прямого хода с гидравлическим выпускным трубопроводом и побуждения поршня двигаться назад; трубопровод управления для перемещения клапана прямого и обратного хода в положение вперед при подключении к гидравлическому источнику; отверстие длинного хода для соединения гидравлического источника с трубопроводом управления через заднюю камеру, когда поршень перемещается назад в первое положение, причем отверстие длинного хода образовано между отверстием обратного хода и отверстием прямого хода и соединено с трубопроводом управления; отверстие короткого хода, соединенное с гидравлическим источником через заднюю камеру, когда поршень перемещается во второе положение, которое ближе к передней стороне цилиндра, чем первое положение, причем отверстие короткого хода образовано между отверстием обратного хода и отверстием длинного хода и подключено к трубопроводу управления; передаточный клапан, расположенный между отверстием короткого хода и трубопроводом управления и устанавливаемый в одно из положения длинного хода для отсоединения отверстия короткого хода от трубопровода управления и положения короткого хода для соединения отверстия короткого хода с трубопроводом управления; датчик приближения для определения нижней мертвой точки поршня, когда цель дроблена; и контроллер, выполненный с возможностью: определения состояния дробления на основе обнаруженной нижней мертвой точки и передачи управляющего сигнала в передаточный клапан на основе определенного состояния дробления, при этом, когда передаточный клапан находится в положении длинного хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается в первое положение и работает в режиме длинного хода, а когда передаточный клапан находится в положении короткого хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается во второе положение, где поршень находится перед возвратом в первое положение, и работает в режиме короткого хода, который короче, чем длинный ход.
В данном описании датчик приближения может быть установлен в цилиндре по направлению к поршню и определять, находится ли часть поршня большого диаметра в точке установки.
В данном описании датчик приближения может обнаруживать максимум положения прямого хода, когда объект дроблен.
В данном описании датчик приближения может представлять собой каждый из множества датчиков, который установлен вдоль направления возвратно-поступательного движения поршня.
В данном описании контроллер может определять состояние дробления на основании комбинации сигналов включения/выключения каждого из множества датчиков.
В данном описании контроллер может определять состояние дробления на основе датчика, ближайшего к переднему концу цилиндра, среди каждого из множества датчиков, которые находятся во включенном состоянии.
В данном описании контроллер может определять состояние дробления с дополнительным учетом синхронизации сигналов включения/выключения каждого из множества датчиков.
В данном описании контроллер может определять состояние дробления на основе комбинации сигналов включения/выключения, когда момент времени, в который включается каждый из множества датчиков, соответствует порядку датчика, расположенного близко к переднему концу цилиндра, от датчика, расположенного близко к заднему концу цилиндра, и приостанавливает определение состояния дробления на основе комбинации сигналов включения/выключения, когда момент времени, в который включается каждый из множества датчиков, соответствует порядку датчика, расположенного близко к заднему концу цилиндра от датчика, расположенного близко к переднему концу цилиндра.
В данном описании состояние дробления может быть характеристикой горной породы, включая, по меньшей мере, твердую породу и мягкую породу.
В данном описании контроллер может устанавливать передаточный клапан в положение длинного хода, когда нижняя мертвая точка поршня равна или меньше заданного положения, и устанавливать передаточный клапан в положение короткого хода, когда нижняя мертвая точка поршня равна или больше, чем заданное положение на основе датчика приближения.
В данном описании контроллер может управлять положением передаточного клапана, регулируя, подается ли питание в передаточный клапан.
В данном описании контроллер может отключать питание передаточного клапана для установки передаточного клапана в положении длинного хода, и контроллер подает питание в передаточный клапан для установки передаточного клапана в положение короткого хода.
В данном описании контроллер и датчик приближения могут связываться друг с другом с помощью Zigbee или Bluetooth.
В данном описании контроллер может передавать импульсный сигнал, имеющий цикл, более короткий, чем цикл возвратно-поступательного движения поршня, и при этом передаточный клапан может перемещаться между положением длинного хода и положением короткого хода множество раз в течение одного цикла возвратно-поступательного движения поршня, таким образом поршень работает в режиме среднего хода, имея среднее расстояние между длинным и коротким ходом.
В данном описании контроллер может управлять длиной среднего хода путем управления шириной импульсного сигнала относительно цикла импульсного сигнала.
В данном описании ударное устройство может представлять собой, по меньшей мере, гидравлический отбойный молоток, используемый для дробления горной породы, и гидравлический молот, используемый для забивания свай.
В данном описании ударное устройство может быть навесным оборудованием, установленным на стреле или рычаге экскаватора.
Согласно другому аспекту настоящего изобретения представлено ударное устройство, выполненное в виде отбойного молотка, установленного на конце стрелы или рычага экскаватора для дробления горной породы, причем устройство содержит: цилиндр; поршень для возвратно-поступательного перемещения в цилиндре; долото для дробления породы за счет возвратно-поступательного движения поршня; электромагнитный клапан для регулирования положения прямого хода, при котором гидравлическое давление для направления усилия прямого хода на поршень прикладывается либо в первом положении цилиндра, либо во втором положении, обратном первому положению; датчик приближения для определения нижней мертвой точки поршня, когда горная порода дроблена; контроллер, выполненный с возможностью: определения характеристик породы на основе обнаруженной нижней мертвой точки и передачи электронного сигнала для управления электромагнитным клапаном в соответствии с характеристиками горной породы.
В данном описании контроллер может определять, что горная порода твердая, так как нижняя мертвая точка находится ближе к переднему концу цилиндра, чем заданная нижняя мертвая точка.
В данном описании контроллер может управлять электромагнитным клапаном, чтобы устанавливать положение прямого хода в первом положении, когда характеристики горной породы - мягкая порода, и устанавливать положение прямого хода во втором положении, когда характеристики горной породы - твердая порода.
В данном описании контроллер может устанавливать положение прямого хода в первом положении для части возвратно-поступательного цикла поршня и может устанавливать положение прямого хода во втором положении для другой части возвратно-поступательного цикла поршня, когда характеристики горной породы находятся между мягкой и твердой породой.
В данном описании контроллер может передавать электронный сигнал в качестве импульсного сигнала и управляет шириной импульсного сигнала относительно цикла импульсного сигнала.
Согласно еще одному аспекту настоящего изобретения представлено ударное устройство, содержащее: поршень для возвратно-поступательного движения и остановки долота, которое дробит объект; датчик приближения для определения нижней мертвой точки поршня, когда поршень останавливает долото; электромагнитный передаточный клапан для регулирования возвратно-поступательного движения поршня в режиме длинного хода или в режиме короткого хода; и контроллер, выполненный с возможностью: генерирования сигнала рабочего цикла на основе обнаруженной нижней мертвой точки и непрерывного переключения возвратно-поступательного движения между режимом длинного хода и режимом короткого хода, так что электромагнитный передаточный клапан выполняет режим длинного хода и режим короткого хода с временным разделением, используя рабочий цикл.
Согласно еще одному аспекту настоящего изобретения представлено строительное оборудование, содержащее: описанное выше ударное устройство; и экскаватор, оснащенный ударным устройством.
При этом контроллер может быть установлен на экскаваторе.
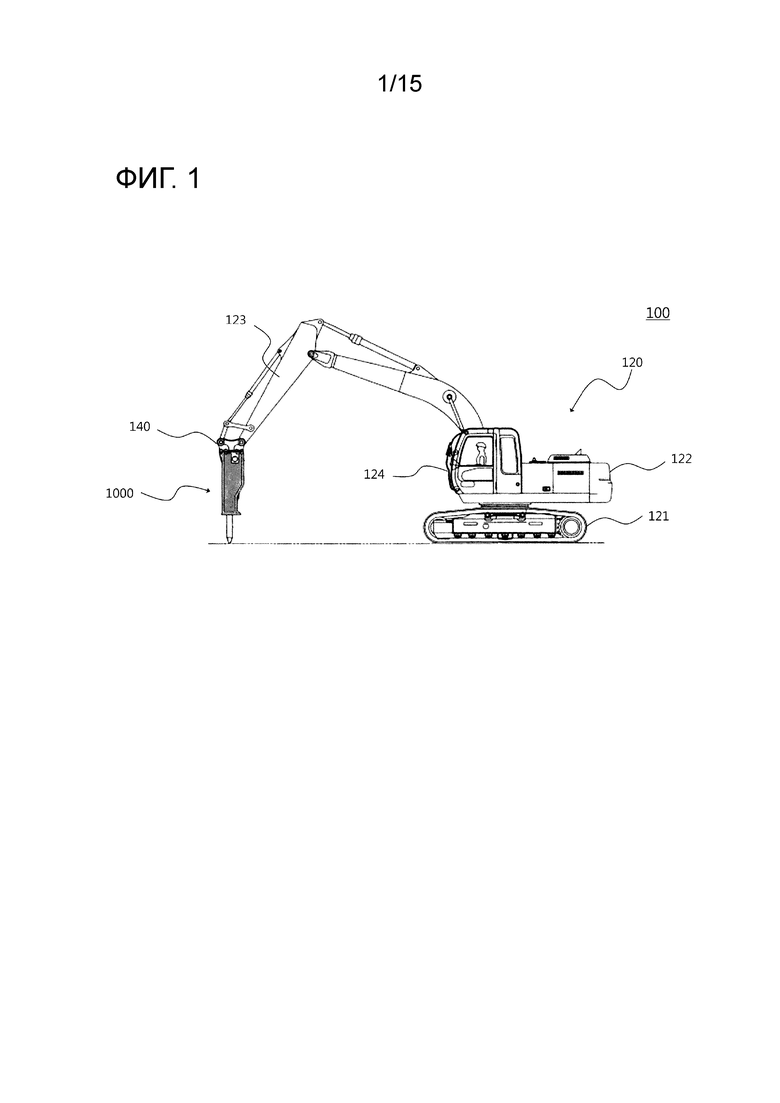
В дальнейшем строительное оборудование 100 согласно варианту осуществления настоящего изобретения будет описано со ссылкой на фиг. 1.
На Фиг. 1 представлен схематичный вид строительного оборудования согласно варианту осуществления настоящего изобретения.
Строительное оборудование 100 согласно варианту осуществления настоящего изобретения представляет собой устройство для выполнения разрушающих работ на объекте. Строительное оборудование 100 для разрушающих работ выполнено в форме, в которой гидравлическое ударное устройство 1000 обычно монтируют на тяжелом оборудовании, таком как экскаватор и тому подобное, в качестве навесного оборудования.
Ударное устройство 1000 - это устройство для выполнения работы по дроблению объекта. Представляемый пример ударного устройства 1000 представляет собой гидравлический отбойный молоток, разрушающий породу, или гидравлический молот, вдавливающий и устанавливающий сваи. Ударное устройство 1000 в настоящем изобретении не ограничено вышеописанным примером и должно пониматься как концепция, включающая в себя различные типы ударных устройств, которые выполняют функцию дробления объекта в дополнение к гидравлическому отбойному молотку или гидравлическому молоту. Ударное устройство 1000 обычно выполнено в виде навесного устройства для установки на тяжелой строительной технике, то есть на транспортном устройстве 120, но настоящее изобретение этим не ограничено, и ударное устройство 1000 может быть выполнено с возможностью отделения от транспортного устройства 120, так чтобы с ним непосредственно обращался рабочий.
Ниже ударное устройство 1000 будет описано более подробно.
Транспортное устройство 120 может быть в основном разделено на движущийся корпус 121 и вращающийся корпус 122. Движущийся корпус 121 обычно выполнен на гусеничном ходу или колесном ходу или в некоторых случаях может быть выполнен в виде крана или грузового автомобиля. Вращающийся корпус 122 установлен с возможностью вращения на движущемся корпусе 121 в вертикальном направлении.
Вращающийся корпус 122 содержит установленный на нем соединительный элемент 123, такой как стрела, рычаг или тому подобное. Ударное устройство 1000 напрямую соединено с конечной частью соединительного элемента 123 в качестве навесного орудия или может быть прикреплено или отсоединено при прикреплении через соединитель 140.
Соединительный элемент 123 обычно имеет, по меньшей мере, два элемента, соединенных друг с другом связанным способом, и соединен с гидравлическим цилиндром 1430 для выполнения операций сгибания, разгибания, выдвижения или тому подобное, путем выдвижения гидравлического цилиндра 1430. Соединительный элемент 123 может расположить ударное устройство 1000, прикрепленное к его конечной части, на объекте, который должен быть раздроблен в ходе работы.
Кроме того, транспортное устройство 120 содержит гидравлический источник 160 для приложения гидравлического давления к ударному устройству 1000, чтобы привести в движение установленное ударное устройство 1000 или для подачи гидравлического давления в каждую часть транспортного устройства 120, такую как стрела или рычаг, или соединитель 140 и в гидравлический бак 160а для хранения рабочей жидкости.
Кроме того, на вращающемся корпусе 122 предусмотрена кабина 124, в которой ездит рабочий, чтобы позволить рабочему управлять транспортным устройством 120 или ударным устройством 1000, используя рабочий элемент, такой как ручка, рычаг или кнопка в кабине 124.
Кроме того, транспортное устройство 120 может содержать выносную опору (не показано) для стабильного крепления строительного оборудования 100 к земле или противовес (не показано) для стабилизации баланса строительного оборудования 100.
Далее будет описано ударное устройство 1000 согласно варианту настоящего изобретения со ссылкой на Фиг. 2 и 3.
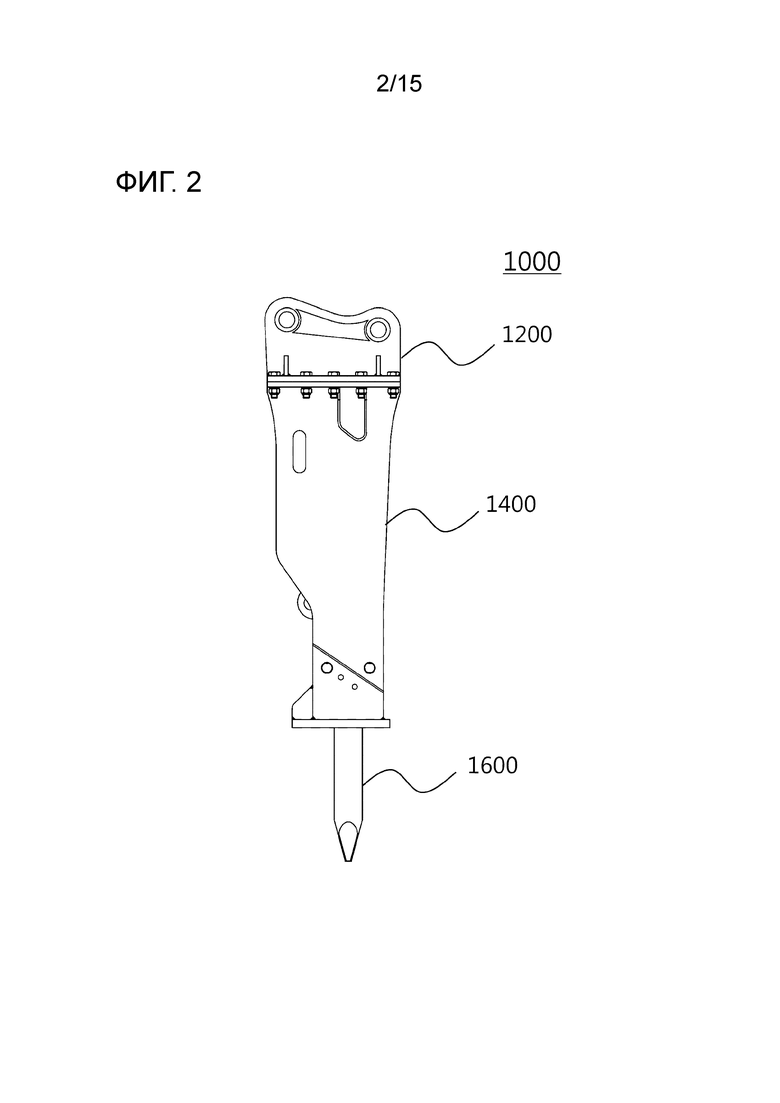
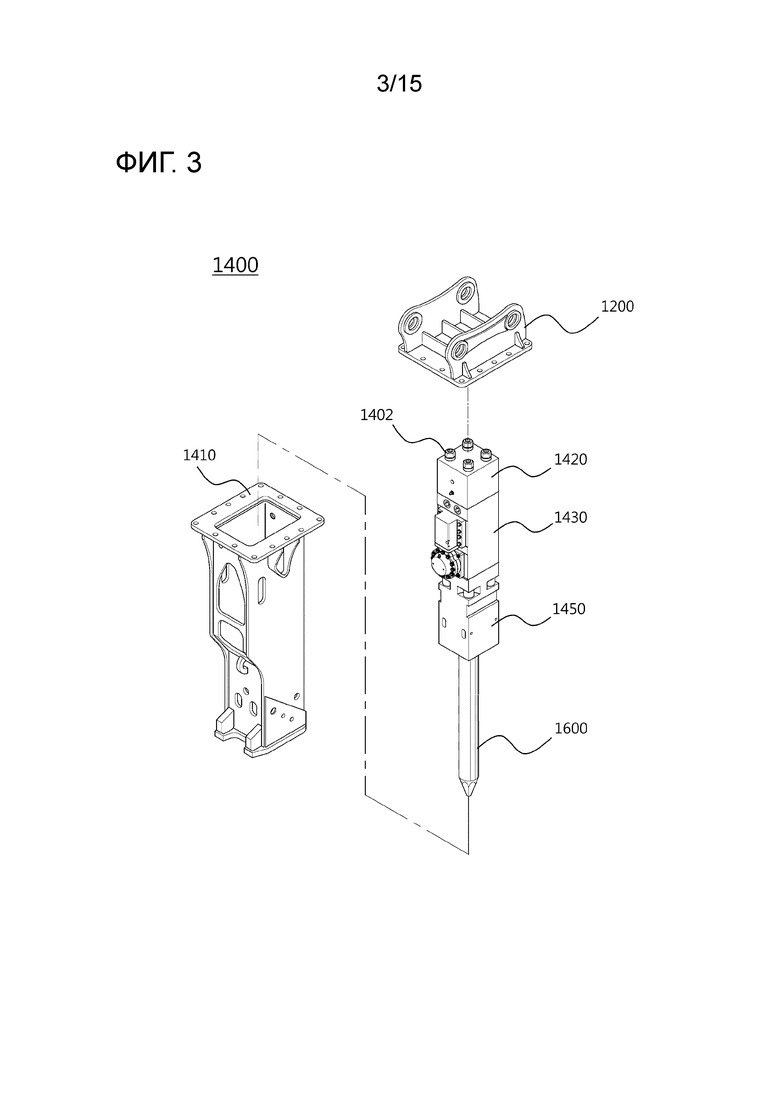
На Фиг. 2 представлен схематичный вид ударного устройства 1000 согласно варианту осуществления настоящего изобретения, и на Фиг. 3 представлено ударное устройство 1000 в разобранном виде в перспективе согласно варианту осуществления настоящего изобретения.
Ударное устройство 1000 может содержать монтажный кронштейн 1200, главный корпус 1400 и долото 1600. Главный корпус 1400, являющийся частью для создания разрушающей силы от ударного устройства 1000, содержит цилиндр 1430 и поршень 1440, размещенный в цилиндре 1430, чтобы позволить поршню 1440 совершать возвратно-поступательное движение с помощью гидравлического давления, прикладываемого от гидравлического источника 160, для создания разрушающей силы. Долото 1600, являющееся деталью, которая непосредственно дробит объект, подлежащий дроблению, расположено на передней стороне главного корпуса 1400 (в следующем описании направление, в котором поршень 1440 движется вперед (выдвигается), определяется как переднее направление, а направление, в котором поршень 1440 движется назад (сжимается), определяется как заднее направление), так что его задний конец ударяется передним концом поршня 1440, когда поршень 1440 выдвигается. Монтажный кронштейн 1200 соединен с задним концом главного корпуса 1400 и является деталью для соединения транспортного устройства 120 с ударным устройством 1000.
Главными составляющими главного корпуса 1400 являются цилиндр 1430 и поршень 1440.
Поршень 1440 имеет цилиндрическую форму, а цилиндр 1430 имеет полую цилиндрическую форму, так что поршень 1440 вставляется в него для совершения возвратно-поступательного движения. На внутренней стенке цилиндра 1430 предусмотрены различные гидравлические отверстия для подачи гидравлического давления внутрь цилиндра 1430 или для выпуска гидравлического давления изнутри цилиндра 1430. По меньшей мере, две части 1442 и 1444 большого диаметра и предусмотренная между ними часть 1446 небольшого диаметра предусмотрены в продольном направлении поршня 1440. Когда гидравлическое давление, приложенное к внутренней части цилиндра 1430 через гидравлические отверстия, прикладывается к ступенчатым поверхностям 1442a и 1444a, образованным частями 1442 и 1444 большого диаметра, поршень 1440 совершает возвратно-поступательное движение в цилиндре 1430 вперед и назад.
Таким образом, когда гидравлические отверстия, образованные в цилиндре 1430, или ступенчатые поверхности 1442a и 1444a поршня 1440 выполнены надлежащим образом, возвратно-поступательное движение поршня 1440 и длину хода поршня 1440 можно регулировать, но подробное описание этого будет приведено ниже.
Передняя головка 1450 и крышка 1420 головки соединены с передним концом и задним концом цилиндра 1430.
Передняя головка 1450 содержит палец долота (не показано), за который цепляется долото 1600, и палец долота (не показано) позволяет расположить долото 1600 в соответствующем положении для удара передним концом поршня 1440, когда поршень 1440 совершает поступательное движение. Кроме того, передняя головка 1450 дополнительно содержит пылезащитный кожух (не показано) для предотвращения попадания посторонних материалов извне в цилиндр 1430, когда поршень 1440 совершает возвратно-поступательное движение, шумопоглощающий элемент (не показано) для уменьшения шума от дробления и тому подобное.
Крышка 1420 головки содержит образованную в ней газовую камеру (не показано), и когда объем газовой камеры сжимается при совершении поршнем 1440 возвратного движения, газовая камера обеспечивает поршню 1440 амортизационный эффект, чтобы предохранить задний конец поршня 1440 от удара.
Крышка 1420 головки, цилиндр 1430 и передняя головка 1450 последовательно соединены длинным болтом 1402, и корпус 1410 закрывает соединитель, и, таким образом, образован главный корпус 1400. Долото 1600 вставляется по направлению к передней стороне главного корпуса 1400 через переднюю головку 1450 и захватывается пальцем долота (не показано), а монтажный кронштейн 1200 крепится на заднем конце корпуса 1400, и, таким образом, образовано ударное устройство 1000.
Конфигурация и конструкция вышеописанного ударного устройства 1000 являются только вариантом осуществления ударного устройства 1000 согласно настоящему примеру, и следует понимать, что другое ударное устройство 1000, имеющее назначение, аналогичное назначению вышеописанной формы, несмотря на наличие немного другой конфигурации или конструкции, также включено в ударное устройство 1000 согласно настоящему изобретению.
В дальнейшем будет описана функция автоматической регулировки длины хода, выполняемая ударным устройством 1000 согласно варианту осуществления настоящего изобретения.
При дроблении породы гидравлическим отбойным молотком для твердой породы требуется длинный ход, а для мягкой породы требуется короткий ход. Твердая порода требует высокой силы дробления, а мягкая порода - нет, и, таким образом, она более эффективна для увеличения скорости работы. Кроме того, когда гидравлический отбойный молоток выполняет процесс, используя большую энергию, чем энергия, необходимая для дробления, к гидравлическому отбойному молотку прикладывается напряжение за счет отталкивания энергии, оставшейся после дробления горной породы, и в цилиндре 1430 образуется трещина, что приводит к повреждению устройства. Поэтому регулировка длины хода нужна не только для повышения эффективности работы.
Функция автоматической регулировки длины хода согласно варианту осуществления настоящего изобретения автоматически и соответствующим образом регулирует длину хода поршня 1440 в соответствии с состоянием дробления.
Например, когда ударное устройство 1000 представляет собой гидравлический отбойный молоток, используемый для дробления горной породы, длину хода можно регулировать на основе твердости разрушаемого объекта в качестве состояния дробления.
В другом примере, когда ударное устройство 1000 представляет собой гидравлический молот, используемый для выполнения ударной операции, длина хода может быть отрегулирована на основе разрушающего усилия, необходимого для забивания сваи в качестве состояния дробления.
В частности, функция автоматической регулировки длины хода выполняется путем обнаружения сигнала, отражающего состояние дробления, определения состояния дробления на основе обнаруженного результата и выбора режима хода, который подходит для определенного состояния дробления. В этом случае репрезентативный пример сигнала, отражающего состояние дробления, представляет собой вибрацию, создаваемую во время дробления, или расстояние, на которое поршень 1440 перемещается назад силой отталкивания после дробления. Кроме того, величина шума, создаваемого при дроблении, расстояние движения вперед (максимальное переднее положение и нижняя мертвая точка), когда поршень 1440 движется вперед, и тому подобное, может использоваться в качестве сигнала, отражающего состояние дробления.
В нижеследующем описании будут описаны различные примеры схемы ударного устройства 1000 для выполнения функции автоматической регулировки длины хода в соответствии с вышеописанным вариантом осуществления настоящего изобретения. Однако, поскольку электрические схемы, описанные ниже, предназначены только для выполнения функции автоматической регулировки длины хода, настоящее изобретение этим не ограничено, и следует понимать, что различные модифицированные примеры описанной ниже электрической схемы также включены в настоящее изобретение без отклонения от сущности настоящего изобретения.
Электрические схемы ударного устройства 1000 согласно варианту осуществления настоящего изобретения будут описаны со ссылкой на Фиг. 4 и 5.
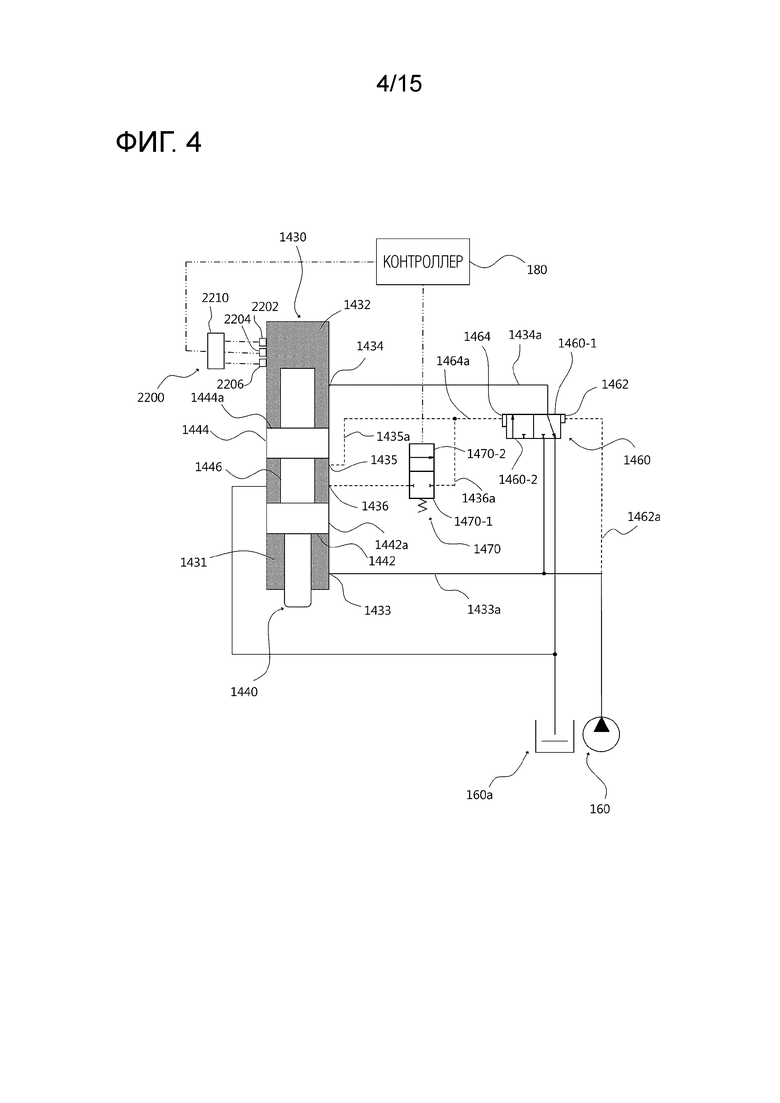
На Фиг. 4 представлен первый пример принципиальной схемы ударного устройства согласно варианту осуществления настоящего изобретения, а на Фиг. 5 представлен второй пример принципиальной схемы ударного устройства согласно варианту осуществления настоящего изобретения.
Как показано на Фиг. 4 и 5, поршень 1440 вставлен в цилиндр 1430, и долото 1600 расположено на переднем конце поршня 1440.
Поршень 1440 содержит переднюю часть 1442 большого диаметра и заднюю часть 1444 большого диаметра, и между передней частью 1442 большого диаметра и задней частью 1444 большого диаметра образована часть 1446 малого диаметра. Наружный диаметр части большого диаметра по существу такой же, как внутренний диаметр цилиндра 1430, и, таким образом, передняя камера 1431 образована между передней частью цилиндра 1430 и передней частью 1442 большого диаметра в цилиндре 1430, а задняя камера 1432 образована между задней частью цилиндра 1430 и задней частью большого диаметра 1444.
Передняя камера 1431 содержит отверстие 1433 обратного хода, а отверстие 1433 обратного хода соединено с гидравлическим источником 160 через трубопровод 1433а обратного хода.
Таким образом, гидравлическое давление может быть приложено к передней камере 1431 путем введения рабочей жидкости из гидравлического источника 160 в отверстие 1433 обратного хода через трубопровод 1433a обратного хода. Гидравлическое давление, приложенное к передней камере 1431, прикладывается к ступенчатой поверхности 1442a передней части 1442 большого диаметра, а усилие обратного хода прикладывается к поршню 1440.
Задняя камера 1432 содержит отверстие 1434 прямого хода, а отверстие 1434 прямого хода связано с клапаном 1460 прямого и обратного хода через трубопровод 1434a прямого хода. Клапан 1460 прямого и обратного хода может быть расположен либо в положении 1460-2 прямого хода, либо в положении 1460-1 обратного хода, трубопровод 1434а прямого хода соединен с гидравлическим источником 160 в положении 1460-2 прямого хода, а трубопровод 1434a прямого хода соединен с гидравлическим баком 160a в положении 1460-1 обратного хода.
Таким образом, когда клапан 1460 прямого и обратного хода расположен в положении 1460-2 прямого хода, гидравлическое давление может быть приложено к задней камере 1432 за счет введения рабочей жидкости из гидравлического источника 160 в отверстие 1434 прямого хода через клапан 1460 прямого и обратного хода и трубопровод 1434а прямого хода. Гидравлическое давление, прикладываемое к задней камере 1432, прикладывается к ступенчатой поверхности 1444a задней части 1444 большого диаметра, и усилие прямого хода прикладывается к поршню 1440.
Кроме того, когда клапан 1460 прямого и обратного хода расположен в положении 1460-1 обратного хода, задняя камера 1432 соединена с гидравлическим баком 160а через трубопровод 1434а прямого хода и клапан 1460 прямого и обратного хода и выпускает рабочую жидкость, введенную в положении 1460-2 прямого хода клапана, в гидравлический бак 160a.
В этой конструкции, поскольку ступенчатая поверхность 1444а задней части 1444 большого диаметра имеет большую площадь, чем ступенчатая поверхность 1442а передней части 1442 большого диаметра, когда клапан 1460 прямого и обратного хода расположен в положении 1460-2 прямого хода усилие прямого хода больше, чем усилие обратного хода, поэтому поршень 1440 может двигаться вперед. И наоборот, когда клапан 1460 прямого и обратного хода расположен в положении 1460-1 обратного хода, гидравлическое давление, подаваемое из гидравлического источника 160, прикладывается только к ступенчатой поверхности 1442a передней части 1442 большого диаметра и, таким образом, поршень 1440 может двигаться назад. Соответственно, поскольку клапан 1460 прямого и обратного хода расположен в положении 1460-2 прямого хода или положении 1460-1 обратного хода, поршень 1440 вынужден совершать возвратно-поступательное движение.
Положение клапана 1460 прямого и обратного хода может регулироваться гидравлическим способом. То есть, клапан 1460 прямого и обратного хода может быть гидравлическим клапаном для выбора положения прямого хода 1460-2 и положения обратного хода 1460-1 в соответствии с входным гидравлическим сигналом.
Передняя рабочая поверхность 1464 и задняя рабочая поверхность 1462, соединенные с гидравлическими трубопроводами, могут быть предусмотрены на обоих концах гидравлического клапана 1460 прямого и обратного хода. В этом случае передняя рабочая поверхность 1464 соединена с трубопроводом 1464a управления прямого хода, разветвленного на трубопровод 1435a длинного хода и трубопровод 1436a короткого хода. Кроме этого, задняя рабочая поверхность 1462 соединена с гидравлическим источником 160 через трубопровод 1462a управления обратного хода.
В этой конструкции, поскольку передняя рабочая поверхность 1464 имеет большую площадь, чем площадь задней рабочей поверхности 1462, когда гидравлическое давление подается на обе рабочие поверхности 1462 и 1464, клапан 1460 прямого и обратного хода может быть расположен в положении 1460-2 прямого хода, и, таким образом, поршень 1440 может двигаться вперед. И наоборот, когда гидравлическое давление, подаваемое из гидравлического источника 160, подается только на заднюю рабочую поверхность 1462, клапан 1460 прямого и обратного хода может быть расположен в положении 1460-1 обратного хода, и, таким образом, поршень 1440 может двигаться назад.
Другими словами, когда, по меньшей мере, один из трубопровода 1435a длинного хода или трубопровода 1436a короткого хода, соединенный с трубопроводом 1464a управления прямого хода, соединен с гидравлическим источником 160, поршень 1440 может двигаться вперед. Когда и трубопровод 1435а длинного хода и трубопровод 1436а короткого хода отсоединены от гидравлического источника 160, поршень 1440 может двигаться назад.
Трубопровод 1435a длинного хода соединен с отверстием 1435 длинного хода, образованным в цилиндре 1430. Отверстие 1435 длинного хода может быть образовано между отверстием 1434 прямого хода и отверстием 1433 обратного хода цилиндра 1430, так чтобы соединяться с или отсоединяться от передней камеры 1431 в соответствии с положением поршня 1440.
В частности, отверстие 1435 длинного хода отсоединено от передней камеры 1431, когда поршень 1440 движется вперед, так что передняя часть 1442 большого диаметра расположена на отверстии 1435 длинного хода или перед отверстием 1435 длинного хода. И наоборот, отверстие 1435 длинного хода соединено с передней камерой 1431, когда поршень 1440 движется назад, так что передняя часть 1442 большого диаметра расположена позади отверстия 1435 длинного хода.
Таким образом, когда отверстие 1435 длинного хода соединено с передней камерой 1431, из гидравлического источника 160 на переднюю рабочую поверхность 1464 подается гидравлическое давление через трубопровод 1433а обратного хода, отверстие 1433 обратного хода, переднюю камеру 1431, отверстие 1435 длинного хода, трубопровод 1435a длинного хода и трубопровод 1464a управления прямого хода, а клапан 1460 прямого и обратного хода может быть расположен в положении 1460-2 прямого хода.
Трубопровод 1436a короткого хода может быть соединен с отверстием 1436 короткого хода, образованным в цилиндре 1430. Отверстие 1436 короткого хода образовано между отверстием 1434 прямого хода и отверстием 1433 обратного хода цилиндра 1430, так чтобы соединяться с или отсоединяться от передней камеры 1431 в соответствии с положением поршня 1440 и может быть образовано в положении, более близком к отверстию 1433 обратного хода, чем отверстие 1435 длинного хода.
В частности, отверстие 1436 короткого хода отсоединено от передней камеры 1431, когда поршень 1440 движется вперед, так что передняя часть 1442 большого диаметра расположена на отверстии 1436 короткого хода или перед отверстием 1436 короткого хода. Наоборот, отверстие 1436 короткого хода соединено с передней камерой 1431, когда поршень 1440 движется назад, так что передняя часть 1442 большого диаметра расположена позади отверстия 1436 короткого хода.
В этом случае, передаточный клапан 1470 для управления замыканием трубопровода 1436a короткого хода образован на трубопроводе 1436a короткого хода. Передаточный клапан 1470 может быть расположен в любом из положения 1470-1 длинного хода и положения 1470-2 короткого хода и блокирует трубопровод 1436a короткого хода в положении 1470-1 длинного хода и соединяет трубопровод 1436a короткого хода в положении 1470-2 короткого хода.
Таким образом, когда отверстие 1436 короткого хода соединено с передней камерой 1431, передаточный клапан 1470 может определять, подается ли гидравлическое давление из гидравлического источника 160 на переднюю рабочую поверхность 1464 через трубопровод 1433а обратного хода, отверстие 1433 обратного хода, переднюю камеру 1431, отверстие 1435 длинного хода, трубопровод 1435a длинного хода и трубопровод 1464a управления прямого хода. В этом случае, когда передаточный клапан 1470 находится в положении 1470-2 короткого хода, трубопровод 1436a короткого хода отсоединен, и клапан 1460 прямого и обратного хода расположен в положении 1460-1 обратного хода с помощью гидравлического давления, подаваемого через трубопровод 1462a управления обратного хода, и когда передаточный клапан 1470 включен, клапан 1460 прямого и обратного хода может быть расположен в положении 1460-2 прямого хода с помощью гидравлического давления, приложенного через трубопровод 1464a управления прямого хода.
Конструкция может позволять поршню 1440 совершать возвратно-поступательное движение между режимом длинного хода и режимом короткого хода в соответствии с положением передаточного клапана 1470.
В режиме длинного хода передаточный клапан 1470 расположен в положении 1470-1 длинного хода.
В этом состоянии, когда поршень 1440 движется вперед, отверстие 1435 длинного хода отсоединено от передней камеры 1431 передней частью 1442 большого диаметра, и клапан 1460 прямого и обратного хода расположен в положении 1460-1 обратного хода, и гидравлическое давление от гидравлического источника 160 не передается на ступенчатую поверхность 1444а задней части 1444 большого диаметра поршня 1440, и, таким образом, поршень 1440 движется назад.
В этом состоянии, когда поршень 1440 движется назад и передняя часть 1442 большого диаметра проходит через отверстие 1435 длинного хода, отверстие 1435 длинного хода соединено с передней камерой 1431, клапан 1460 прямого и обратного хода располагается в положении 1460-2 прямого хода, и гидравлическое давление от гидравлического источника 160 передается на ступенчатую поверхность 1444а задней части 1444 большого диаметра поршня 1440, и, таким образом, поршень 1440 движется вперед.
В этом случае передняя часть 1442 большого диаметра проходит через отверстие 1436 короткого хода перед тем, как пройти через отверстие 1435 длинного хода, но трубопровод 1436a короткого хода отсоединен передаточным клапаном 1470 и гидравлическое давление не передается.
Таким образом, в режиме длинного хода, когда положение передней части 1442 большого диаметра поршня 1440 проходит через отверстие 1435 длинного хода, начинается движение вперед.
В режиме короткого хода передаточный клапан 1470 расположен в положении 1470-2 короткого хода.
В этом состоянии, когда поршень 1440 движется вперед, отверстие 1436 короткого хода отсоединено от передней камеры 1431 передней частью 1442 большого диаметра, клапан 1460 прямого и обратного хода расположен в положении 1460-1 обратного хода, и гидравлическое давление от гидравлического источника 160 не передается на ступенчатую поверхность 1444а задней части 1444 большого диаметра поршня 1440, и, таким образом, поршень 1440 движется назад.
В этом состоянии, когда поршень 1440 движется назад, и передняя часть 1442 большого диаметра проходит через отверстие 1436 короткого хода, отверстие 1436 короткого хода соединено с передней камерой 1431, и трубопровод 1436a короткого хода соединен с передаточным клапаном 1470. Гидравлическое давление подается из источника гидравлического давления на переднюю рабочую поверхность 1464 клапана 1460 прямого и обратного хода, клапан 1460 прямого и обратного хода располагается в положении 1460-2 прямого хода, и гидравлическое давление из гидравлического источника 160 передается на ступенчатую поверхность 1444а задней части 1444 большого диаметра поршня 1440, и, таким образом, поршень 1440 двигается вперед.
Таким образом, в режиме короткого хода, когда положение передней части 1442 большого диаметра поршня 1440 проходит через отверстие 1436 короткого хода, начинается движение вперед.
В этом случае отверстие 1435 длинного хода расположено позади отверстия 1436 короткого хода, и движение вперед начинается в режиме короткого хода быстрее, чем в режиме длинного хода, и, таким образом, расстояние перемещения поршня 1440 назад уменьшается, и длина хода уменьшается.
Как описано выше, длину хода можно регулировать посредством выбора режима между режимом длинного хода и режимом короткого хода, а режим переключается передаточным клапаном 1470.
Передаточный клапан 1470 может автоматически переключаться между положением 1470-1 длинного хода и положением 1470-2 короткого хода в соответствии с состоянием дробления.
В частности, на ударное устройство 1000 можно установить датчик 2000 состояния дробления для обнаружения нарушения проводимости. Датчик 2000 состояния дробления обнаруживает нарушение проводимости и передает сигнал для состояния дробления на контроллер 180, и контроллер 180 передает управляющий сигнал в передаточный клапан 1470 на основании состояния дробления и устанавливает положение передаточного клапана 1470. В качестве передаточного клапана 1470 можно использовать электромагнитный клапан с электронным управлением.
В качестве датчика 2000 состояния дробления можно использовать датчик 2200 приближения. Датчик 2200 приближения устанавливают на ударном устройстве 1000 для определения положения поршня 1440 при проведении дробления.
Например, когда поршень 1440 дробит горную породу с использованием долота 1600, датчик 2200 приближения может обнаруживать максимальное положение прямого хода (далее именуемое «нижняя мертвая точка»). В частности, датчик 2200 приближения вставляют в паз или отверстие, образованное в цилиндре 1430, и он может быть установлен в направлении, перпендикулярном направлению возвратно-поступательного движения поршня 1440. Таким образом, датчик 2200 приближения может обнаруживать, проходят ли часть малого диаметра или части 1442 и 1444 большого диаметра через положение установки датчика 2200 приближения, когда поршень совершает возвратно-поступательное движение.
Кроме того, множество датчиков 2200 приближения может быть расположено на цилиндре 1430 в направлении возвратно-поступательного движения поршня 1440. Например, датчик 2200 приближения может содержать задний датчик 2202, средний датчик 2204 и передний датчик 2206, расположенные по порядку от стороны, близкой к заднему концу цилиндра 1430, к стороне, близкой к его переднему концу.
Снова со ссылкой на Фиг. 4 датчик 2200 приближения может быть предусмотрен на задней стороне цилиндра 1430 с тремя датчиками 2202, 2204 и 2206, расположенными по порядку от задней стороны цилиндра 1430 до его передней стороны. Каждый из датчиков 2202, 2204 и 2206 расположенного датчика 2200 приближения обнаруживает заднюю часть 1444 большого диаметра. В этом случае, когда поршень 1440 находится в максимальном положении прямого хода, датчики 2202, 2204 и 2206 расположены вокруг области, в которой расположена задняя ступенчатая поверхность 1444а задней части 1444 большого диаметра. Максимальное положение прямого хода поршня 1440, когда ударное устройство 1000 дробит твердую породу, образовано позади максимального положения прямого хода поршня 1440, когда ударное устройство 1000 дробит мягкую породу. Уровень, до которого долото проникает в твердую породу, меньше уровня, до которого долото проникает в мягкую породу. Таким образом, когда датчик 2200 приближения расположен, как показано на Фиг. 4, так как положение прямого хода поршня 1440 ближе к переднему концу датчика приближения, датчик 2200 приближения последовательно выключается от заднего датчика 2202. Например, когда каждый из датчиков 2202, 2204 и 2206 приближения обнаруживает больше сигналов, объект, подлежащий дроблению, может быть близок к твердой породе, и когда каждый из датчиков 2202, 2204 и 2206 приближения обнаруживает меньше сигналов, объект, подлежащий дроблению, может быть близок к мягкой породе. В случае, когда датчики 2202, 2204 и 2206 приближения обнаруживают переднюю ступенчатую поверхность задней части 1444 большого диаметра на нижней мертвой точке поршня 1440, когда датчики 2202, 2204 и 2206 обнаруживают больше сигналов, объект, подлежащий дроблению, может быть твердой породой, и когда датчики 2202, 2204 и 2206 обнаруживают меньше сигналов, объект, подлежащий дроблению, может быть мягкой породой.
Нет необходимости располагать датчики 2202, 2204 и 2206 приближения, как показано на Фиг. 6. Когда поршень 1440 расположен в нижней мертвой точке, датчик 2200 приближения может обнаруживать переднюю ступенчатую поверхность или заднюю ступенчатую поверхность передней части 1442 большого диаметра или переднюю ступенчатую поверхность или заднюю ступенчатую поверхность задней части 1444 большого диаметра.
Таким образом, когда датчик 2200 приближения обнаруживает переднюю ступенчатую поверхность, датчик 2200 приближения может быть расположен в положении, достаточно близком для датчика, ближайшего к переднему концу поршня 1440, датчика 2200 приближения для обнаружения ступенчатой поверхности на максимальной нижней мертвой точке (мягкая порода) и для датчика, ближайшего к заднему концу поршня 1440, для обнаружения ступенчатой поверхности на минимальной нижней мертвой точке (твердая порода).
То есть расстояние между множеством датчиков может быть таким же или немного большим, чем расстояние между нижними мертвыми точками в твердой породе и мягкой породе.
При таком расположении, при обнаружении передней ступенчатой поверхности части большого диаметра горная порода может быть твердой породой, когда число отключенных датчиков увеличивается, и горная порода может быть мягкой породой, когда увеличивается количество включенных датчиков. И наоборот, при обнаружении задней ступенчатой поверхности части большого диаметра горная порода может быть твердой породой, когда количество включенных датчиков увеличивается, и горная порода может быть мягкой породой, когда количество выключенных датчиков увеличивается.
Между тем, как показано на Фиг. 4, необязательно устанавливать датчик 2200 приближения для обнаружения задней части 1444 большого диаметра поршня 1440. Например, как показано на Фиг. 5, возможно установить датчик 2200 приближения для обнаружения передней части 1442 большого диаметра поршня 1440.
При необходимости датчик 2200 приближения можно соответствующим образом установить в различных положениях цилиндра 1430 в дополнение к положениям, показанным на Фиг.4 или 5. На Фиг. 6 представлен такой пример.
На Фиг. 6 представлен вид примера, в котором датчик 2200 приближения расположен согласно варианту осуществления настоящего изобретения.
Как показано на Фиг. 6, датчик 2200 приближения может быть расположен в положении, в котором задняя часть 1444 большого диаметра обнаруживается, когда поршень 1440 движется вперед, а передняя часть 1442 большого диаметра обнаруживается, когда поршень 1440 движется назад. В этом случае множество датчиков 2200 приближения может быть расположено в цилиндре 1430 в продольном направлении цилиндра 1430.
В соответствии с состоянием, в котором датчик 2200 приближения расположен, как показано на Фиг. 6, состояние дробления может быть получено в соответствии с тем, обнаруживает ли каждый из датчиков 2202, 2204 и 2206 заднюю часть 1444 большого диаметра, когда поршень 1440 движется вперед. Это будет описано со ссылкой на Фигуры с 7 по 9.
На Фиг. 7 представлен вид, показывающий нижнюю мертвую точку поршня 1440, когда твердая порода дроблена, в состоянии, в котором датчик 2200 приближения расположен, как показано на Фиг. 6. Как показано на Фиг. 7, когда поршень 1440 дробит твердую породу, движение поршня 1440 вперед сдерживается силой отталкивания твердой породы, и, таким образом, только задний датчик 2202 может обнаружить заднюю часть 1444 большого диаметра, а другие датчики 2204 и 2206 не могут обнаружить заднюю часть 1444 большого диаметра. В этом случае, даже когда задний датчик 2202 не может обнаружить заднюю часть 1444 большого диаметра, горная порода может быть определена как очень твердая порода.
На Фиг. 8 представлен вид, показывающий нижнюю мертвую точку поршня 1440, когда средняя порода дроблена, в состоянии, в котором датчик 2200 приближения расположен согласно Фиг. 6. Как показано на Фиг. 8, когда поршень 1440 дробит среднюю горную породу, движение поршня 1440 вперед сдерживается силой отталкивания средней породы. В этом случае, сила отталкивания средней породы слабее, чем такая сила твердой породы, и, таким образом, задний датчик 2202 и средний датчик 2204 могут обнаружить заднюю часть 1444 большого диаметра и не могут обнаружить передний датчик 2206.
На Фиг. 9 представлен вид, показывающий нижнюю мертвую точку поршня 1440, когда мягкая порода дроблена, в состоянии, в котором датчик 2200 приближения расположен согласно Фиг. 6. Как показано на Фиг. 9, когда поршень 1440 дробит мягкую породу, сила отталкивания слабее, чем даже такая сила средней породы, и, таким образом, все датчики 2202, 2204 и 2206 могут обнаружить заднюю часть 1444 большого диаметра.
На основании вышеприведенного описания в вышеописанном состоянии расположения, показанном на Фиг. 6, твердость разрушаемого объекта может быть подтверждена в зависимости от того, включены или выключены датчики 2202, 2204 и 2206 приближения.
На Фиг. 10 представлен вид, иллюстрирующий секции распознавания в соответствии с твердостью разрушаемого объекта, датчика 2200 приближения, расположенного в соответствии с Фиг. 6, а на Фиг. 11 представлена таблица для определения твердости разрушаемого объекта в соответствии с результатом обнаружения датчика 2200 приближения, расположенного в соответствии с Фиг. 6.
Как показано на Фиг. 10, когда разрушаемый объект представляет собой очень твердую породу, нижняя мертвая точка задней части 1444 большого диаметра находится позади заднего датчика 2202, а когда разрушаемый объект представляет собой твердую породу, нижняя мертвая точка задней части 1444 большого диаметра расположена между задним датчиком 2202 и средним датчиком 2204. Когда разрушаемый объект представляет собой среднюю горную породу, нижняя мертвая точка задней части 1444 большого диаметра находится между средним датчиком 2204 и передним датчиком 2206, а когда разрушаемый объект представляет собой мягкую породу, нижняя мертвая точка задней части 1444 большого диаметра располагается перед передним датчиком 2206.
Таким образом, контроллер 180, описанный ниже, принимает сигнал от датчика 2200 приближения и может анализировать свойства горной породы на основе сигнала. На Фиг. 11 представлена таблица, показывающая результат определения согласно каждому случаю.
Определение может быть выполнено просто на основе состояния включения/выключения, но может быть уточнено в большей степени на основе сигнала каждого из датчиков 2202, 2204 и 2206 по линии времени. В частности, даже когда датчик 2200 приближения обнаруживает текущий сигнал приближения, датчик 2200 приближения не может различить, является ли обнаруживаемый объект передней частью 1442 большого диаметра или задней частью 1444 большого диаметра, и, таким образом, для более точного определения, датчик 2200 приближения должен учитывать, находится ли поршень 1440 в прямом состоянии или обратном состоянии или наблюдать тип сигнала по линии времени.
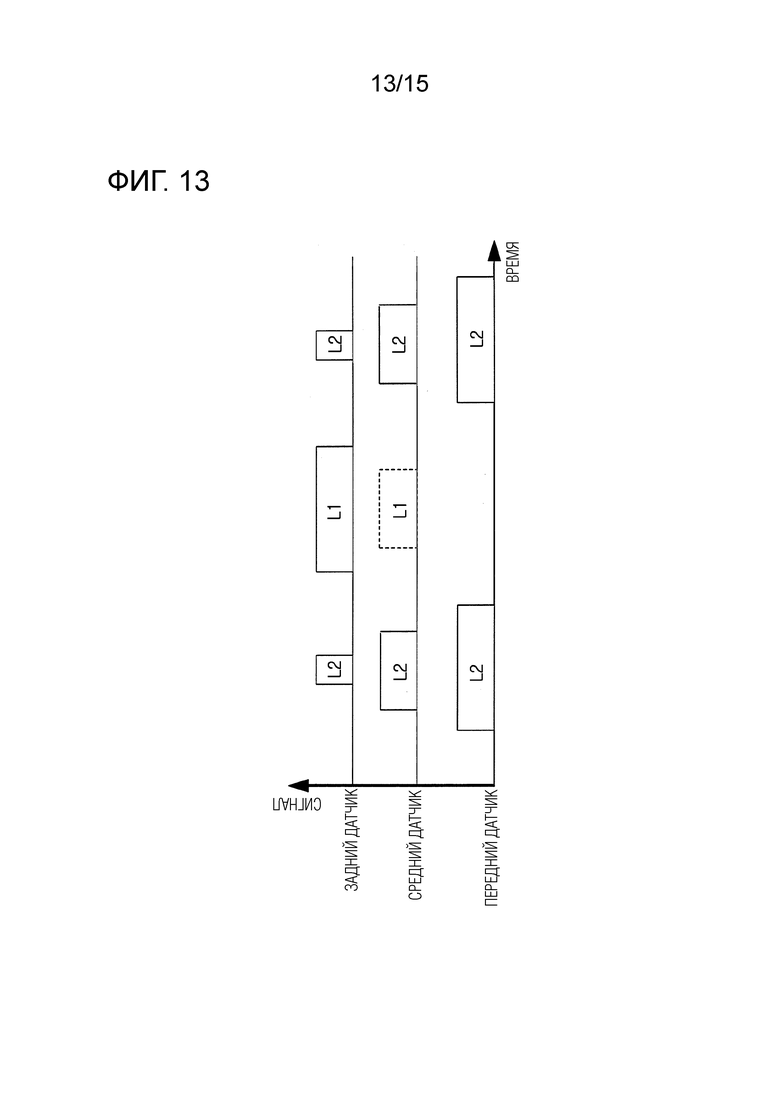
На Фиг. 12 представлен график, показывающий сигнал датчика 2200 приближения, когда мягкая порода дроблена, в состоянии, в котором датчик 2200 приближения расположен согласно Фиг. 6, а на Фиг. 13 представлен график, показывающий сигнал датчика 2200 приближения, когда твердая порода или средняя порода дроблена, в состоянии, в котором датчик 2200 приближения расположен в соответствии с Фиг. 6. На Фиг. 12 и 13 «L 2» относится к передней части 1442 большого диаметра, а «L 1» относится к задней части 1444 большого диаметра.
Как показано на Фиг. 12, при движении ударного устройства 1000 назад для первого дробления, когда начинается операция дробления мягкой породы, передний датчик 2206 сначала обнаруживает переднюю часть 1442 большого диаметра, и средний датчик 2204 и задний датчик 2202 последовательно включаются посредством передней части 1442 большого диаметра, по мере постепенного продвижения поршня 1440 назад.
В этом состоянии, когда поршень 1440 движется вперед, задний датчик 2202, средний датчик 2204 и передний датчик 2206 последовательно выключаются.
Когда передний конец поршня 1440 приближается к точке дробления, задний датчик 2202 обнаруживает заднюю часть 1444 большого диаметра и включается. В этом состоянии, когда поршень 1440 опускается ниже в соответствии со степенью дробления мягкой породы, задний датчик 2202, средний датчик 2204 и передний датчик 2206 последовательно включаются.
Таким образом, поскольку случай, когда передний датчик 2206 включается по времени последовательно первым, означает, что поршень 1440 движется назад, можно подтвердить, что твердость разрушаемого объекта не отражается.
Кроме того, поскольку случай, когда только задний датчик 2202 включается по времени последовательно первым, означает, что поршень 1440 движется вперед, твердость разрушаемого объекта может быть определена в соответствии с тем, включен или выключен датчик 2200 приближения. На Фиг. 12, когда весь датчик 2200 включен, может быть подтверждено, что операция дробления выполняется на мягкой породе. Как это будет описано ниже, контроллер 180 может сделать определение на основе сигнала, принятого от датчика 2200 приближения.
Как показано на Фиг. 13, когда ударное устройство 1000 первоначально перемещается назад для операции дробления твердой породы, передний датчик 2206 сначала обнаруживает переднюю часть 1442 большого диаметра, и средний датчик 2204 и задний датчик 2202 последовательно включаются передней частью 1442 большого диаметра, по мере того как поршень 1440 постепенно движется назад.
В этом состоянии, когда поршень 1440 движется вперед, задний датчик 2202, средний датчик 2204 и передний датчик 2206 последовательно выключаются.
Когда передний конец поршня 1440 приближается к точке дробления, задний датчик 2202 обнаруживает заднюю часть 1444 большого диаметра и включается. В этом состоянии, когда поршень 1440 не опускается ниже из-за меньшей или малой степени дробления твердой породы, задний датчик 2202, средний датчик 2204 и передний датчик 2206 не включаются.
Таким образом, поскольку случай, когда передний датчик 2206 включается по времени последовательно первым, означает, что поршень 1440 движется назад, можно подтвердить, что твердость разрушаемого объекта не отражается.
Кроме того, поскольку случай, когда только задний датчик 2202 включается по времени последовательно первым, означает, что поршень 1440 движется вперед, твердость разрушаемого объекта можно определить в соответствии с тем, включен или выключен датчик 2200 приближения. На Фиг. 13, когда включен только задний датчик 2202 датчика 2200 приближения, можно подтвердить, что разрушаемый объект является твердой породой. Кроме того, на Фиг. 13, когда включены только задний датчик 2202 и средний датчик 2204 датчика 2200 приближения, можно подтвердить, что разрушаемый объект является средней горной породой. Как это будет описано ниже, контроллер 180 может сделать определение на основе сигнала, принятого от датчика 2200 приближения.
Между тем, можно определить, движется ли поршень 1440 вперед или назад на основе комбинации сигналов без процесса временных рядов датчиков. Таким образом, положение прямого хода или движение поршня 1440 вперед может быть определено на основании случая, когда включен задний датчик 2202, как показано на Фиг. 11.
Датчик 2200 приближения может передавать электронный сигнал, отражающий обнаруженное значение включения/выключения, на контроллер 180. Датчик 2200 приближения и контроллер 180 могут быть соединены с модулем 2210 связи для передачи или приема информации. Модуль 2210 связи может разрешать передачу или прием данных между контроллером 180 и датчиком 2200 приближения по беспроводной или проводной связи. Однако когда датчик 2200 приближения и контроллер 180 соединены проводным способом, предпочтительно, чтобы датчик 2200 приближения и контроллер 180 были соединены беспроводным образом из-за повреждения провода, вызванного повторением возвратно-поступательного движения по свойствам ударного устройства 1000. Репрезентативный пример беспроводной связи включает Bluetooth с низким энергопотреблением (BTLE) или ZigBee. Поскольку связь между датчиком 2200 приближения и контроллером 180 не требует большой пропускной способности, связь малой мощности может быть предпочтительной. Однако, в настоящем изобретении связь между датчиком 2200 приближения и контроллером 180 этим не ограничена.
Контроллер 180, который представляет собой электронную схему для обработки и вычисления различных электронных сигналов, может принимать сигнал от датчика, вычислять информацию/данные и управлять другими компонентами строительного оборудования 100, используя электронный сигнал.
Контроллер 180 обычно расположен в транспортном устройстве 120, но может быть расположен в ударном устройстве 1000. Кроме того, необязательно, чтобы контроллер 180 был образован как единый объект. Контроллер 180 может быть образован в виде множества контроллеров 180, взаимодействующих друг с другом по мере необходимости. Контроллер 180 может быть рассредоточен, например, часть контроллера 180 может быть установлена в ударном устройстве 1000, а другие его части могут быть установлены в транспортном устройстве 120, и рассредоточено расположенные контроллеры 180 могут сообщаться друг с другом проводным или беспроводным способом, чтобы выполнить свою функцию. Когда множество контроллеров 180 расположено рассредоточено, некоторые из контроллеров 180, в качестве вспомогательного устройства, просто передают только сигнал или информацию, а оставшиеся контроллеры 180, в качестве основного устройства, принимают различные сигналы или информацию и выполняют обработку/вычисление и командование/управление.
Контроллер 180 может определять состояние дробления (например, свойства разрушаемого объекта, такие как твердость горной породы, когда горная порода дроблена), согласно входному электронному сигналу. В частности, контроллер 180 может определять состояние дробления на основе состояния включения/выключения и времени включения/выключения каждого из датчиков 2202, 2204 и 2206 в соответствии с входным электронным сигналом. Например, в случае, когда датчики последовательно включаются по порядку от переднего датчика 2206 к заднему датчику 2202 посредством входного электронного сигнала, когда горная порода дроблена, сигнал генерируется, когда поршень 1440 движется назад, и, таким образом, контроллер 180 не использует сигнал в качестве данных определения свойств горной породы. И наоборот, в случае, когда датчики последовательно включаются по порядку от заднего датчика 2202 к переднему датчику 2206 посредством входного электронного сигнала, когда горная порода дроблена, сигнал генерируется, когда поршень 1440 движется вперед, и, таким образом, контроллер 180 может определять свойства горной породы на основании состояния включения/выключения каждого из датчиков 2202, 2204 и 2206, как показано в таблице на Фиг. 11. Как показано в таблице на фиг. 11, свойства горной породы могут быть грубо определены с помощью комбинации включения/выключения датчика 2200 приближения, но порядок, в котором каждый из датчиков 2202, 2204 и 2206 включается, должен дополнительно рассматриваться для подготовки состояния, в котором все датчики включены или выключены.
Когда состояние дробления определено, контроллер 180 может регулировать длину хода, используя передаточный клапан 1470. Например, когда горная порода определена как твердая порода, контроллер 180 выводит сигнал остановки в передаточный клапан 1470, и электромагнитный клапан располагается в положении 1470-1 длинного хода, и, таким образом, ударное устройство 1000 может эксплуатироваться в режиме длинного хода. И наоборот, когда горная порода определена как мягкая порода, контроллер 180 выдает сигнал включения в передаточный клапан 1470, и электромагнитный клапан располагается в положении 1470-2 короткого хода, и, таким образом, ударное устройство 1000 может эксплуатироваться в режиме короткого хода.
Согласно вышеприведенному описанию датчик 2200 приближения обнаруживает нижнюю мертвую точку задней части 1444 большого диаметра, отражая ее свойства в соответствии с состоянием дробления при работе ударного устройства 1000. Контроллер 180 устанавливает режим хода на основе комбинации включения/выключения обнаруженных датчиков 2202, 2204 и 2206 приближения и порядка их включения/выключения и управляет передаточным клапаном 1470 в соответствии с установленным режимом хода. Передаточный клапан 1470 может регулировать длину хода ударного устройства 1000 в соответствии с режимом длинного хода или режимом короткого хода. Другими словами, ударное устройство 1000 может выполнять функцию автоматической регулировки длины хода для автоматической регулировки длины хода в соответствии с состоянием дробления.
В вышеприведенном описании, не смотря на то, что в основном было описано, что три датчика 2202, 2204 и 2206 предусмотрены на переднем, среднем и заднем концах поршня 1440 в качестве датчика 2200 приближения, для экономии затрат используются только один или два датчика 2200 приближения, а четыре или больше датчиков 2200 приближения могут быть использованы для повышения точности. Кроме того, необязательно располагать датчик 2200 приближения для обнаружения задней части 1444 большого диаметра, и датчик 2200 приближения может обнаруживать другие объекты, отражающие возвратно-поступательное движение и положение нижней мертвой точки поршня 1440 на основе комбинации включения/выключения датчиков, или может быть расположен в другом положении.
Между тем, согласно приведенному выше описанию, ударное устройство 1000 может выполнять двухступенчатую передачу, при которой ударное устройство 1000 работает в режиме длинного хода, когда горная порода является твердой породой, и в режиме короткого хода, когда горная порода является мягкой породой.
Однако, в настоящем изобретении ударное устройство 1000 также может иметь трехступенчатую или более передачу или бесступенчатую передачу.
Далее будут описаны операции трехступенчатой или более передачи или бесступенчатой передачи согласно варианту осуществления настоящего изобретения.
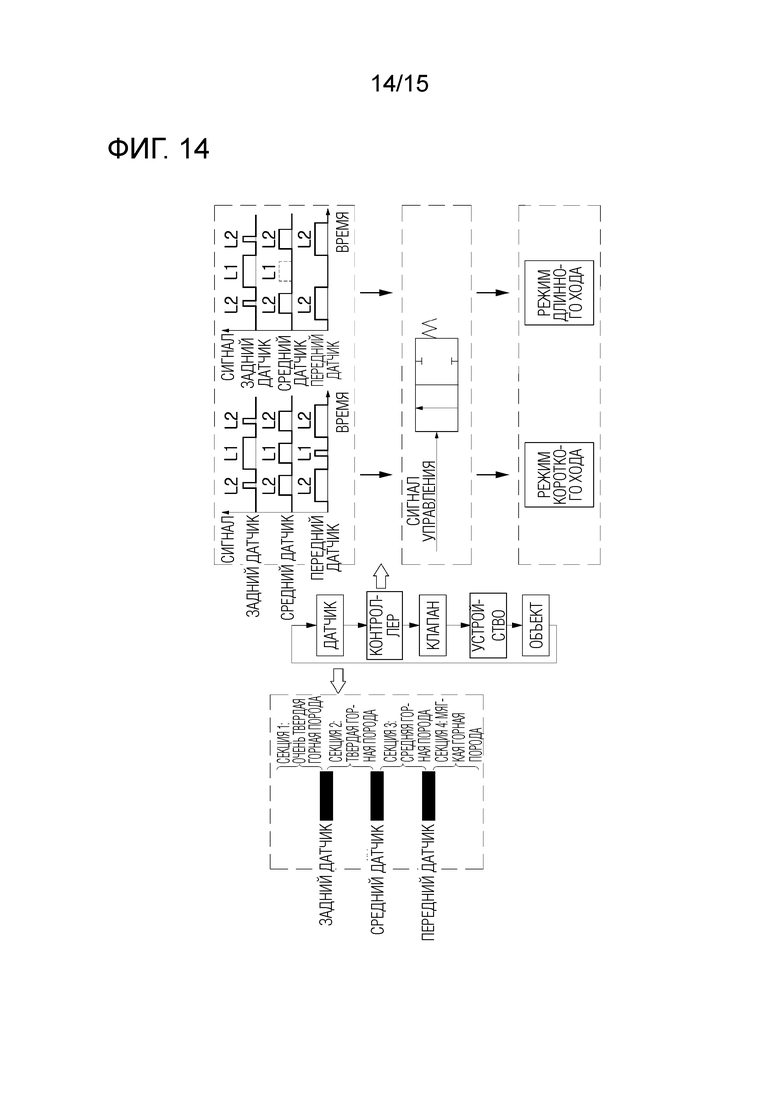
На Фиг. 14 представлен вид управляющего сигнала включения/выключения контроллера 180 согласно варианту осуществления настоящего изобретения.
Как показано на Фиг. 14, когда ударное устройство 1000 дробит объект, подлежащий дроблению, датчик 2200 приближения обнаруживает положение нижней мертвой точки. Контроллер 180 определяет состояние дробления в соответствии с комбинацией обнаруженного включения/выключения датчиков, передает сигнал включения, когда требуется сильное дробление, и передает сигнал выключения, когда требуется быстрое дробление (сигнал выключения может не быть фактически переданным сигналом). В случае сигнала выключения, передаточный клапан 1470 располагается в положении длинного хода 1470-1, и ударное устройство 1000 приводится в действие в режиме длинного хода для выполнения сильного дробления путем увеличения длины хода, а при подаче сигнала включения, передаточный клапан 1470 располагается в положении 1470-2 короткого хода, и ударное устройство 1000 приводится в действие в режиме короткого хода, для уменьшения длины хода, и, таким образом, выполняется быстрое дробление.
Как описано выше, когда передаточный клапан 1470 постоянно находится в режиме длинного хода или режиме короткого хода, при управлении передаточным клапаном 1470 в соответствии с сигналами включения/выключения контроллера 180, ударное устройство 1000 может приводиться в действие в режиме длинного/короткого ходов.
Однако, в этом случае, когда сигнал контроллера 180 меняется с разделением по времени, передаточный клапан 1470 двигается вперед-назад между положением 1470-1 длинного хода и положением 1470-2 короткого хода, и поршень 1440 может совершать возвратно-поступательное движение на длину хода, которая является средним расстоянием между длинным и коротким ходом. То есть ударное устройство 1000 может приводиться в действие в режиме среднего хода.
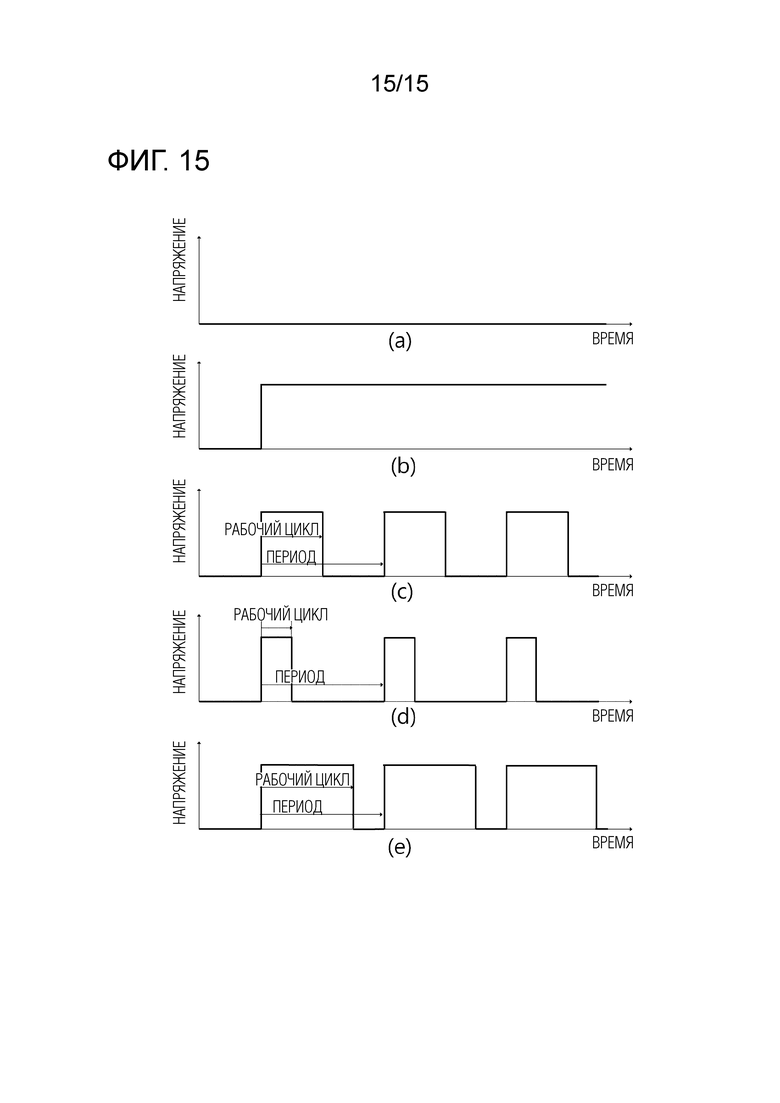
На Фиг. 15 представлен вид временного сигнала для трехступенчатой или более или бесступенчатой передачи согласно варианту осуществления настоящего изобретения.
На фиг. 15А и 15В показаны управляющие сигналы для режима длинного хода и режима короткого хода. В этом случае управляющий сигнал является входным сигналом от контроллера 180 в передаточный клапан 1470. Контроллер 180 передает управляющий сигнал для длинного хода, когда горная порода является твердой породой, и передает управляющий сигнал для короткого хода, когда горная порода является мягкой породой, основываясь на сигналах включения/выключения, обнаруженных датчиком 2200 приближения.
В этом случае, когда контроллер 180 определяет, что горная порода имеет свойства между мягкой породой и твердой породой на основе комбинации включения/выключения датчика 2200 приближения, контроллер 180 выводит управляющие сигналы включения/выключения в форме импульса и управляет передаточным клапаном 1470 для перемещения между положением 1470-1 длинного хода и положением 1470-2 короткого хода, как показано на Фиг. 15C, 15D и 15E. Таким образом, когда передаточный клапан 1470 перемещается между двумя положениями 1470-1 и 1470-2, поршень 1440 совершает возвратно-поступательное движение на расстояние среднего хода, между расстоянием длинного хода и расстоянием короткого хода.
А именно, поршень 1440 получает усилие прямого хода в режиме длинного хода после прохождения через отверстие 1435 длинного хода и получает усилие прямого хода в режиме короткого хода после прохождения через отверстие 1436 короткого хода. Однако, когда передаточный клапан 1470 переключается между режимом длинного хода и режимом короткого хода с разделением по времени, поршень 1440 получает усилие прямого хода только во время рабочего цикла управляющего сигнала в период времени с момента, когда передняя часть 1442 большого диаметра проходит через отверстие 1436 короткого хода, и, таким образом, поршень 1440 может перемещаться назад на среднее расстояние между максимальным расстоянием обратного перемещения во время длинного хода и максимальным расстоянием обратного перемещения во время короткого хода.
Другими словами, контроллер 180 управляет рабочим циклом в течение периода импульсного сигнала, в то время как управляющий сигнал включения/выключения подается в качестве импульсного сигнала, чтобы обеспечить приведение в действие ударного устройства 1000 в режиме среднего хода между длинным ходом и коротким ходом.
Таким образом, контроллер 180 может управлять ударным устройством 1000 путем трехступенчатой передачи коротких/средних/длинных ходов путем регулировки рабочего цикла. Например, контроллер 180 может работать в режиме среднего хода, используя импульсный сигнал, показанный на Фиг. 8С.
Контроллер 180 увеличивает длину хода за счет удлинения рабочего цикла и уменьшает длину хода за счет уменьшения рабочего цикла, чтобы таким образом выполнять бесступенчатую передачу. Например, как показано на Фиг. 15C, 15D и 15E, контроллер 180 может управлять длиной хода, меняемой между длинным ходом и коротким ходом, путем регулировки рабочего цикла в сравнении с периодом импульсного сигнала.
Между тем, в вышеописанной функции автоматической регулировки длины хода контроллер 180 может выполнять передачу с учетом предварительно определенного времени задержки. В этом случае время задержки означает, что режим хода переключается после заданного времени, а не сразу, даже когда обнаруживается изменение состояния дробления. В настоящем изобретении ошибка в положении нижней мертвой точки, обнаруженной датчиком 2200 приближения, может возникнуть из-за его свойств. Не смотря на то, что ошибка не возникает, когда долото 1600 поочередно дробит твердую породу и мягкую породу до состояния, в котором твердая порода и мягкая порода смешиваются, происходит частое переключение режима хода, и, таким образом, может возникнуть проблема снижения эффективности работы. В этом случае более эффективно, когда дробление выполняется только в режиме длинного хода, чем когда дробление выполняется попеременно в режиме длинного хода и режиме короткого хода.
Таким образом, хотя обнаруживается комбинация включения/выключения, соответствующая конкретному режиму хода, контроллер 180 может переключать режим хода, когда идентичные комбинации включения/выключения обнаруживаются в течение предварительно определенного времени (например, кратного периоду возвратно-поступательного движения поршня 1440).
Например, не смотря на то, что комбинация включения/выключения для мягкой породы обнаруживается, когда режим длинного хода выполняется на твердой породе в течение одного периода возвратно-поступательного движения поршня 1440, контроллер 180 не переключает длинный ход на короткий ход. Вместо этого контроллер 180 принимает во внимание обнаруженный случай, в котором требуется короткий ход. После этого, когда непрерывно обнаруживается предварительно определенное количество случаев, в которых требуется короткий ход, контроллер 180 может переключить длинный ход на короткий ход. Не смотря на то, что предварительно определенное количество случаев, в которых требуется короткий ход, не определяется непрерывно, когда предварительно определенное количество комбинаций включения/выключения обнаруживается в течение предварительно определенного количества дроблений, изменение режима может быть выполнено. То есть, когда свойства мягкой породы обнаруживаются во время четырех дроблений в периоде из пяти дроблений, режим может переключиться на короткий ход.
В дальнейшем способ автоматической регулировки длины хода согласно варианту представленного изобретения будет описан ниже.
Способ автоматической регулировки длины хода включает в себя операцию S110 передачи сигнала, который обнаруживается датчиком 2000 состояния дробления и отражает состояние дробления на контроллер 180, операцию S120 определения состояния дробления на основе принятого контроллером 180 сигнала и операцию S130, позволяющую контроллеру 180 управлять ударным устройством 1000 с использованием передаточного клапана 1470 для выполнения режима хода, соответствующего определенному состоянию дробления.
Не смотря на то, что настоящее изобретение было подробно описано со ссылкой на иллюстративные варианты осуществления, специалистам в данной области техники должно быть понятно, что различные изменения, модификации и замены в форме и деталях могут быть сделаны без выхода за пределы сущности и объема настоящего изобретения. Таким образом, вышеописанные варианты осуществления настоящего изобретения могут быть реализованы отдельно или в комбинации.
Таким образом, объем настоящего изобретения не ограничен вариантами осуществления. Объем настоящего изобретения определяется не подробным описанием настоящего изобретения, а прилагаемой формулой изобретения и охватывает все модификации и эквиваленты, попадающие в объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ГИДРАВЛИЧЕСКОЙ ДРОБИЛКИ С БЕССТУПЕНЧАТЫМ АВТОРЕГУЛИРОВАНИЕМ ХОДА | 2015 |
|
RU2619234C2 |
| ГИДРОМОЛОТ С ФУНКЦИЕЙ ВЫЧИСЛЕНИЯ ВРЕМЕНИ ЭКСПЛУАТАЦИИ | 2017 |
|
RU2706043C1 |
| УЗЕЛ ДАТЧИКА УГЛА СЦЕПКИ | 2015 |
|
RU2613123C2 |
| ВЕНТИЛЯЦИОННОЕ УСТРОЙСТВО ДЛЯ ФОРМ ЛИТЬЯ ПОД ДАВЛЕНИЕМ | 1994 |
|
RU2082546C1 |
| ИНСТРУМЕНТ С НАСОСОМ И НАСОС | 2019 |
|
RU2759455C1 |
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ | 2008 |
|
RU2465497C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2009 |
|
RU2471097C2 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРИСОЕДИНЕНИЯ В БУРИЛЬНОЙ КОЛОННЕ | 1997 |
|
RU2159319C2 |
| ПНЕВМАТИЧЕСКОЕ САМОХОДНОЕ УДАРНОЕ УСТРОЙСТВО ДЛЯ ДРОБЛЕНИЯ ПОРОДЫ С ПОМОЩЬЮ ИМПУЛЬСНОЙ СТРУИ СВЕРХВЫСОКОГО ДАВЛЕНИЯ | 2017 |
|
RU2689453C1 |
| ФЛАНЕЦ ДЛЯ МНОЖЕСТВА ПОЛЕВЫХ УСТРОЙСТВ | 2016 |
|
RU2675198C1 |
Настоящее изобретение относится к гидравлическому ударному устройству и оснащенной им строительной технике. Техническим результатом является обеспечение регулирования длины хода ударного устройства в соответствии с состоянием дробления. Ударное устройство содержит: цилиндр для размещения поршня; поршень для возвратно-поступательного движения в цилиндре; отверстие обратного хода для соединения передней камеры, расположенной на передней стороне цилиндра, с гидравлическим источником; отверстие прямого хода, образованное в задней камере, расположенной на задней стороне цилиндра; клапан прямого и обратного хода для управления движением поршня; трубопровод управления для перемещения клапана прямого и обратного хода при подключении к гидравлическому источнику; отверстие длинного хода для соединения гидравлического источника с трубопроводом управления через переднюю камеру, когда поршень перемещается назад в первое положение; отверстие короткого хода, соединенное с гидравлическим источником через переднюю камеру при движении поршня во второе положение; передаточный клапан, расположенный между отверстием короткого хода и трубопроводом управления; датчик приближения для определения нижней мертвой точки поршня; и контроллер, выполненный с возможностью: определения состояния дробления на основании обнаруженной нижней мертвой точки и передачи управляющего сигнала в передаточный клапан на основании определенного состояния дробления. Причем, когда передаточный клапан находится в положении длинного хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается в первое положение и работает в режиме длинного хода, и когда передаточный клапан находится в положении короткого хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается во второе положение, в котором поршень находится перед возвращением в первое положение, и работает в режиме короткого хода, который короче длинного хода. 2 н. и 17 з.п. ф-лы, 15 ил.
1. Ударное устройство, которое дробит объект, причем устройство содержит:
цилиндр для размещения поршня;
поршень для возвратно-поступательного движения в цилиндре;
отверстие обратного хода для соединения передней камеры, расположенной на передней стороне цилиндра, с гидравлическим источником;
отверстие прямого хода, образованное в задней камере, расположенной на задней стороне цилиндра;
клапан прямого и обратного хода для управления движением поршня вперед и движением назад путем его расположения в одном из положения прямого хода для соединения отверстия прямого хода с гидравлическим источником и побуждения поршня двигаться вперед и положения обратного хода для соединения отверстия прямого хода с гидравлическим выпускным трубопроводом и побуждения поршня двигаться назад;
трубопровод управления для перемещения клапана прямого и обратного хода в положение прямого хода при подключении к гидравлическому источнику;
отверстие длинного хода для соединения гидравлического источника с трубопроводом управления через переднюю камеру, когда поршень перемещается назад в первое положение, причем отверстие длинного хода образовано между отверстием обратного хода и отверстием прямого хода и соединено с трубопроводом управления;
отверстие короткого хода, соединенное с гидравлическим источником через переднюю камеру при движении поршня во второе положение, которое ближе к передней стороне цилиндра, чем первое положение, при этом отверстие короткого хода образовано между отверстием обратного хода и отверстием длинного хода и соединено с трубопроводом управления;
передаточный клапан, расположенный между отверстием короткого хода и трубопроводом управления и устанавливаемый в одно из положения длинного хода для отсоединения отверстия короткого хода от трубопровода управления и положения короткого хода для соединения отверстия короткого хода с трубопроводом управления;
датчик приближения для определения нижней мертвой точки поршня, когда цель дроблена; и
контроллер, выполненный с возможностью: определения состояния дробления на основании обнаруженной нижней мертвой точки и передачи управляющего сигнала в передаточный клапан на основании определенного состояния дробления,
причем, когда передаточный клапан находится в положении длинного хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается в первое положение и работает в режиме длинного хода, и когда передаточный клапан находится в положении короткого хода, поршень получает усилие прямого хода в момент времени, когда поршень возвращается во второе положение, в котором поршень находится перед возвращением в первое положение, и работает в режиме короткого хода, который короче длинного хода.
2. Ударное устройство по п. 1, в котором датчик приближения установлен в цилиндре в направлении к поршню и обнаруживает, находится ли часть поршня большого диаметра в точке установки.
3. Ударное устройство по п. 2, в котором датчик приближения обнаруживает максимум положения прямого хода, когда объект дроблен.
4. Ударное устройство по п. 2, в котором датчик приближения представляет собой каждый из множества датчиков, установленных вдоль направления возвратно-поступательного движения поршня.
5. Ударное устройство по п. 4, в котором контроллер определяет состояние дробления на основе комбинации сигналов включения/выключения каждого из множества датчиков.
6. Ударное устройство по п. 4, в котором контроллер определяет состояние дробления на основе датчика, ближайшего к переднему концу цилиндра, среди каждого из множества датчиков, которые находятся во включенном состоянии.
7. Ударное устройство по п. 5, в котором контроллер определяет состояние дробления с дополнительным учетом синхронизации сигналов включения/выключения каждого из множества датчиков.
8. Ударное устройство по п. 7, в котором контроллер определяет состояние дробления на основе комбинации сигналов включения/выключения, когда момент времени, в который включается каждый из множества датчиков, представляет собой порядок датчика, который находится близко к переднему концу цилиндра от датчика ближнего к заднему концу цилиндра, и приостанавливает определение состояния дробления на основе комбинации сигналов включения/выключения, когда момент времени, в который включается каждый из множества датчиков, представляет собой порядок датчика, который находится близко к заднему концу цилиндра от датчика, ближнего к переднему концу цилиндра.
9. Ударное устройство по п. 1, в котором состояние дробления представляет собой характеристику горной породы, включая по меньшей мере твердую породу и мягкую породу.
10. Ударное устройство по п. 1, в котором контроллер управляет передаточным клапаном в положении длинного хода, когда нижняя мертвая точка поршня равна или меньше заданного положения, и управляет передаточным клапаном в положении короткого хода, когда нижняя мертвая точка поршня равна или больше заданного положения на основе датчика приближения.
11. Ударное устройство по п. 1, в котором контроллер управляет положением передаточного клапана, регулируя, подается ли питание в передаточный клапан.
12. Ударное устройство по п. 11, в котором контроллер останавливает питание передаточного клапана для установки передаточного клапана в положение длинного хода и контроллер подает питание в передаточный клапан для установки передаточного клапана в положение короткого хода.
13. Ударное устройство по п. 1, в котором контроллер и датчик приближения обмениваются данными друг с другом с помощью Zigbee или Bluetooth.
14. Ударное устройство по п. 1, в котором контроллер передает импульсный сигнал, имеющий цикл короче возвратно-поступательного цикла поршня, и
в котором передаточный клапан перемещается между положением длинного хода и положением короткого хода множество раз в течение одного возвратно-поступательного цикла поршня, так что поршень работает в режиме среднего хода, имея среднее расстояние между длинным ходом и коротким ходом.
15. Ударное устройство по п. 14, в котором контроллер управляет длиной среднего хода путем управления шириной импульсного сигнала относительно цикла импульсного сигнала.
16. Ударное устройство по п. 1, в котором ударное устройство содержит, по меньшей мере, гидравлический отбойный молоток, используемый для дробления горной породы, и гидравлический молот, используемый для забивания сваи.
17. Ударное устройство по п. 1, в котором ударное устройство представляет собой навесное оборудование, установленное на стреле или рычаге экскаватора.
18. Строительное оборудование, содержащее:
ударное устройство по п. 1 и
экскаватор, оборудованный ударным устройством.
19. Строительное оборудование в соответствии с п. 17, в котором контроллер установлен в экскаваторе.
| УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2480587C1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ЦИКЛОМ ГИДРАВЛИЧЕСКОЙ УДАРНОЙ МАШИНЫ | 2004 |
|
RU2260121C1 |
| US 5174387 A1, 29.12.1992 | |||
| US 5860481 A1, 19.01.1999 | |||
| US 20120250815 A1, 04.10.2012 | |||
| KR 20160015487 A, 15.02.2016. | |||

