Область техники
[1] Настоящее изобретение в целом относится к гидромолоту с функцией вычисления времени эксплуатации.
Уровень техники
[2] Обычно гидромолот используют для дробления подстилающих пород. Гидромолот содержит поршень возвратно-поступательного хода, корпус, содержащий цилиндрический канал, и аккумулятор давления, в котором создано давление предварительного нагружения для защиты гидромолота от полости в текучей среде и градиента давления и для повышения эксплуатационной эффективности гидромолота, а также для передачи кинетической энергии, вырабатываемой за счет воздействия поршня на отбойник таким образом, чтобы наконечник отбойника, используя эту кинетическую энергию, мог дробить подстилающие породы.
[3] Несмотря на то, что гидромолот может выйти из строя по причине вибраций, вызванных его длительным использованием для дробления горной породы, способ контроля времени эксплуатации гидромолота в целом отсутствует.
[4] В процитированном ниже документе 1 раскрыты система и способ диагностики отказа гидравлической системы зажимного устройства для AMT путем сравнения времени задержки для достижения целевого приводного крутящего момента с эталонным временем достижения целевого приводного крутящего момента. Однако в данном документе не раскрыта проверка срока службы гидравлической системы.
Описание
Техническая задача
[5] Соответственно, целью настоящего изобретения является создание гидромолота с функцией вычисления фактического времени его эксплуатации для проверки срока его службы.
Техническое решение
[6] В первом варианте осуществления настоящее изобретение предусматривает гидромолот, содержащий: основной блок; блок датчика, измеряющий вибрацию, создаваемую в основном блоке при дроблении объектов, подлежащих дроблению, в том числе подстилающих пород, для вывода измерительного сигнала; и блок управления, принимающий измерительный сигнал для вычисления времени, в течение которого вибрирует основной блок, и, таким образом, вычисления времени эксплуатации.
[7] Дополнительно, основной блок содержит: цилиндр; поршень, размещенный в цилиндре для возвратно-поступательного перемещения в осевом направлении цилиндра, при этом поршень содержит первую лицевую поверхность поршня, ориентированную так, что давление прикладывается в направлении обратного хода, вторую лицевую поверхность поршня, ориентированную так, что давление прикладывается в направлении прямого хода, и кольцевое пространство, расположенное между первой лицевой поверхностью поршня и второй лицевой поверхностью поршня; отбойник, задействуемый для оказания ударного воздействия и дробления подстилающих пород с помощью возвратно-поступательного перемещения поршня; напорный трубопровод, выполненный с возможностью доставки рабочего давления через его выпускное отверстие, соединенное с цилиндром; редукционный обратный трубопровод, выполненный с возможностью понижения давления через его выпускное отверстие, соединенное с цилиндром; регулирующий клапан, содержащий внутри регулирующий плунжер, малую поверхность регулирующего плунжера, задействуемую для перемещения регулирующего плунжера в положение обратного хода, и большую поверхность регулирующего плунжера, задействуемую для перемещения регулирующего плунжера в положение прямого хода или положение обратного хода; клапан хода, содержащий сторону впуска, сторону выпуска и нижнюю сторону, при этом сторона впуска соединена с напорным трубопроводом, соединенным с гидравлическим насосом через напорный трубопровод регулирования хода, сторона выпуска соединена с поворотным трубопроводом для регулирующего клапана через дополнительный трубопровод, соединенный с регулирующим клапаном, и нижняя сторона соединена с гидравлическим насосом через гидравлический регулирующий клапан, приводимый в действие под управлением принимающего MCU; и пружину, нагруженную на верхней поверхности клапана хода для восстановления механического усилия в ответ на изменение гидравлического давления.
[8] Кроме того, блок датчика дополнительно содержит: датчик вибрации, измеряющий вибрацию гидромолота для вывода измерительного сигнала; и беспроводной передатчик, беспроводным образом выводящий измерительный сигнал.
[9] Дополнительно, датчик вибрации содержит: металлический корпус; выступ, образованный на верхнем торце корпуса; пару ферромагнитных элементов смещения, закрепленных под выступом для обеспечения рабочей точки для электронного материала; металлическую крышку, закрывающую верхнюю часть корпуса; керамический изолятор, прикрепленный к нижней поверхности металлической крышки; металлический электрод, введенный в корпус сквозь металлическую крышку и керамический изолятор; и магнитный шарик, входящий в контакт и выходящий из контакта с металлическим электродом для получения соответствующего сигнала, при этом керамический изолятор предусмотрен для регулирования напряженности магнитного поля между металлической крышкой и магнитным шариком.
[10] Дополнительно, блок управления содержит: беспроводной приемник, принимающий измерительный сигнал; хронометр, принимающий измерительный сигнал от беспроводного приемника для отсчета времени эксплуатации, в течение которого основной блок гидромолота находился в эксплуатации; и вычислитель, принимающий время эксплуатации от хронометра для вычисления времени эксплуатации, в течение которого гидромолот находился в эксплуатации.
Преимущественные эффекты
[11] Согласно настоящему изобретению, можно вычислить время эксплуатации гидромолота для проверки срока службы гидромолота, в результате чего если гидромолот испытывает поломку до истечения гарантийного срока службы, эту поломку можно было устранить без его ликвидации, за счет чего сокращаются расходы на техническое обслуживание изготовителя или продавца гидромолота.
Описание графических материалов
[12] На фиг. 1 представлена структурная схема, на которой показан гидромолот с функцией вычисления времени эксплуатации согласно варианту осуществления настоящего изобретения;
[13] на фиг. 2 представлена схема, на которой показана конструкция основного блока гидромолота, представленного на фиг. 1;
[14] на фиг. 3 представлена структурная схема, на которой показана конфигурация блока датчика, представленного на фиг. 1;
[15] на фиг. 4 представлена схема, на которой показан датчик вибрации, представленный на фиг. 3, когда гидромолот остановлен, согласно варианту осуществления;
[16] на фиг. 5 представлена схема, на которой показан датчик вибрации, представленный на фиг. 3, когда гидромолот эксплуатируется, согласно варианту осуществления;
[17] на фиг. 6 представлена структурная схема, на которой показан блок управления, представленный на фиг. 1; и
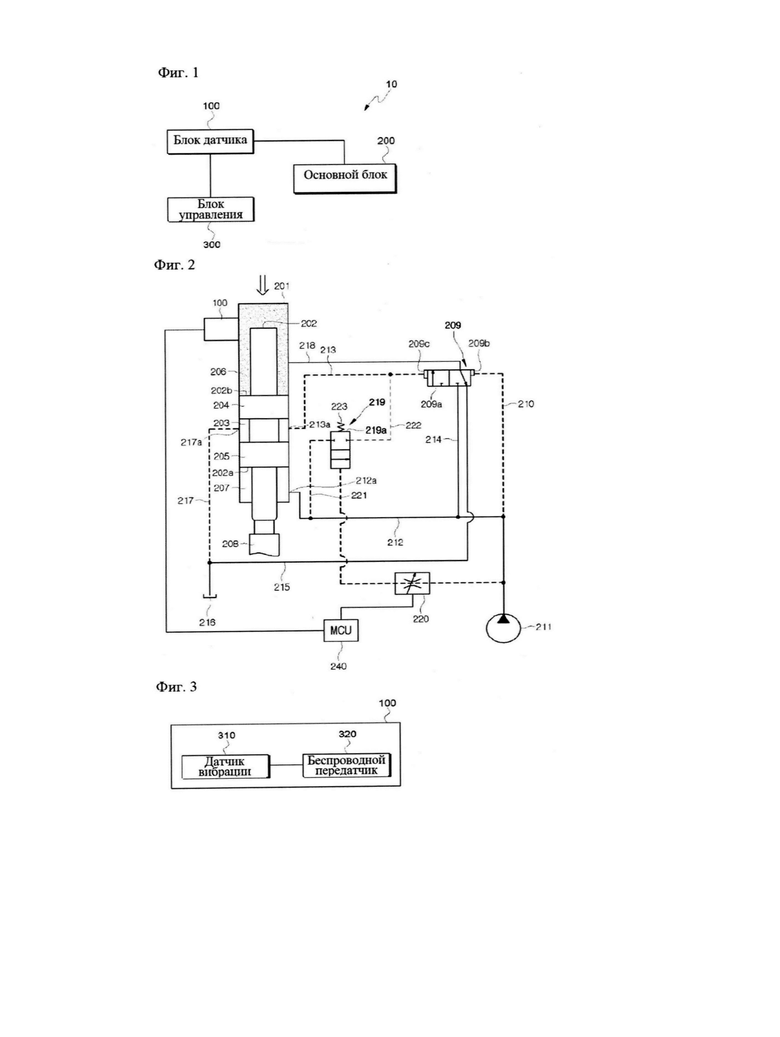
[18] на фиг. 7 представлена временная диаграмма, на которой показана процедура вычисления времени эксплуатации на основе измеренного сигнала, выводимого из блока датчика, представленного на фиг. 1.
Предпочтительный вариант осуществления
[19] Техническое решение согласно настоящему изобретению для достижения вышеуказанной цели создания гидромолота с функцией вычисления времени эксплуатации, а также результаты эксплуатации настоящего изобретения будут в явном виде понятны из нижеследующего описания со ссылкой на сопровождающие графические материалы, на которых показаны предпочтительные варианты осуществления изобретения.
[20] Следует отметить, что в нижеследующем описании, если функции традиционных элементов и подробное описание элементов, связанных с настоящим изобретением, могут делать неясным сущность настоящего изобретения, подробное описание таких элементов будет опущено. Следует понимать, что, хотя в данном документе для описания различных элементов могут быть использованы термины «первый», «второй» и т.д., эти элементы не следует ограничивать данными терминами. Данные термины используются лишь для того, чтобы отличить один элемент от другого.
[21] Подробное описание представлено ниже со ссылкой на сопровождающие графические материалы, на которых показаны примерные варианты осуществления, в которых реализовано изобретение. Эти варианты осуществления представлены таким образом, что данное описание будет исчерпывающим и полным, и будет полностью передавать объем изобретения для специалистов в данной области техники. Следует понимать, что, хотя различные варианты осуществления изобретения являются разными, варианты осуществления необязательно являются исключающими друг друга. Например, конкретные формы, конструкции и признаки элементов, описанных в варианте осуществления, могут быть модифицированы в другие формы, конструкции и признаки без выхода за пределы объема настоящего изобретения. Кроме того, положения или компоновки отдельных элементов, представленных в варианте осуществления, также могут быть модифицированы в другую конфигурацию без выхода за пределы объема настоящего изобретения. Таким образом, нижеследующее описание не предусматривается как ограничивающее, но лишь как иллюстративное. Сходным образом, объем настоящего изобретения ограничен лишь всеми признаками пунктов формулы изобретения и эквивалентными им признаками. Повсюду в графических материалах одинаковые ссылочные позиции относятся к аналогичным элементам.
[22] Ниже будет дано описание предпочтительных вариантов осуществления изобретения со ссылкой на сопровождающие графические материалы, позволяющие средним специалистам в данной области техники легко реализовать изобретение.
[23]
[24] На фиг. 1 представлена структурная схема, на которой показан гидромолот с функцией вычисления времени эксплуатации согласно варианту осуществления настоящего изобретения.
[25] Со ссылкой на фиг. 1, гидромолот 10 может содержать основной блок 200, блок 100 датчика, измеряющий вибрацию, создаваемую в основном блоке 200 при дроблении объектов, подлежащих дроблению, в том числе подстилающих пород, для вывода измерительного сигнала, и блок 300 управления, принимающий измерительный сигнал для вычисления времени, в течение которого вибрирует основной блок, и, таким образом, вычисления времени эксплуатации.
[26] Основной блок 200 служит для оказания ударного воздействия и дробления подстилающих пород с помощью создаваемого поршнем возвратно-поступательного перемещения отбойника. Поскольку основной блок 200 вибрирует в ходе его эксплуатации по причине перемещения поршня, время, в которое основной блок вибрирует, можно определить как время, в которое начинается эксплуатация гидромолота для дробления подстилающих пород.
[27] Блок 100 датчика может измерять вибрацию, создаваемую в основном блоке 200, для вывода измерительного сигнала. Для обнаружения вибрации, создаваемой в основном блоке 200, блок 100 датчика может быть закреплен на основном блоке 200 гидромолота. Кроме того, блок 199 датчика может беспроводным образом передавать измерительный сигнал в блок 300 управления. Когда амплитуда вибрации, создаваемой в основном блоке 200, превышает пороговое значение, блок 100 датчика определяет, что основной блок 200 находится в эксплуатации и выводит измерительный сигнал, а когда амплитуда вибрации находится ниже порогового значения, блок датчика определяет, что эксплуатация основного блока 200 прекращена, и не может выводить измерительный сигнал.
[28] Блок 300 управления может быть выполнен с возможностью приема измерительного сигнала от блока 100 датчика. При приеме измерительного сигнала блок 300 управления может контролировать время, в которое был получен измерительный сигнал, для вычисления времени эксплуатации основного блока 200. Блок 300 управления может беспроводным образом принимать измерительный сигнал от блока 100 датчика. Кроме того, когда амплитуда измерительного сигнала из блока 100 датчика превышает пороговое значение, блок 300 управления может определить, что основной блок находится в эксплуатации, а когда амплитуда измерительного сигнала из блока 100 датчика находится ниже порогового значения, блок управления может определить, что эксплуатация основного блока 200 прекращена.
[29] Кроме того, блок 300 управления может отображать вычисленное время эксплуатации, в течение которого гидромолот находился в эксплуатации. Время эксплуатации может содержать несколько отдельных периодов эксплуатации, в течение которых гидромолот периодически находился в эксплуатации от момента запуска до момента останова, и суммарное время эксплуатации гидромолота. Дополнительно, может отображаться только время, в течение которого гидромолот выполняет дробление подстилающих пород. Отображаемое время, однако, этим не ограничивается. В блоке 300 управления может храниться время эксплуатации.
[30]
[31] На фиг. 2 представлена схема, на которой показана конструкция основного блока гидромолота, представленного на фиг. 1.
[32] Со ссылкой на фиг. 2, основной блок 200 гидромолота может содержать полый цилиндр 201 и поршень 202, размещенный в цилиндре 201 и возвратно-поступательно перемещающийся в осевом направлении цилиндра. Поршень 202 может содержать переднюю и заднюю направляющую части 205, 204, которые отделены одна от другой кольцевым пространством 203, расположенным между ними. Передняя и задняя направляющие части содержат на боковых сторонах, противоположных кольцевому пространству 203, первую и вторую лицевые поверхности поршня 202а, 202b, которые ограничивают, соответственно, переднюю и заднюю камеры 207, 206 цилиндра. Здесь первая лицевая поверхность 202а поршня может иметь меньшую площадь, чем вторая лицевая поверхность 202b поршня. Направление прямого хода поршня 202 обозначено стрелкой с двойной линией.
[33] Блок 100 датчика прикреплен к одной стороне наружной стенки цилиндра 201, а ударная секция, такая как отбойник 208, прикреплена к дальнему концу поршня снаружи цилиндра 201. При нормальной эксплуатации, когда отбойник 208 не достигает и не дробит подстилающие породы, поршень 202 имеет нормальное положение хода.
[34] Регулирующие устройство для переключения действия поршня 202 содержит регулирующий плунжер 209а, выполненный с возможностью перемещения в регулирующем клапане 209. Регулирующий плунжер 209а содержит малую поверхность 209b регулирующего плунжера и большую поверхность 209с регулирующего плунжера, при этом малая поверхность 209b регулирующего плунжера непрерывно подвергается действию рабочего давления посредством восстанавливающего трубопровода 210. Рабочее давление создается гидравлическим насосом 211. Первая лицевая поверхность 202а поршня также непрерывно подвергается действию рабочего давления через напорный трубопровод 212, сообщающийся с восстанавливающим трубопроводом 210. Напорный трубопровод 212 установлен на цилиндре 201 так, что его выпускное отверстие 212а непрерывно располагается в передней камере 207 цилиндра.
[35] При нормальной эксплуатации большая поверхность 209с регулирующего плунжера 209а соединена с цилиндром 201 через поворотный трубопровод 213 так, что его выпускное отверстие 213а сообщается с редукционным обратным трубопроводом 217 через кольцевое пространство 203.
[36] Регулирующий клапан 209 соединен с напорным трубопроводом 212 через регулирующий трубопровод 214 с одной стороны и с баком 216 — через обратный трубопровод 215 с другой стороны, при этом регулирующий клапан соединен с цилиндром 201 через редукционный обратный трубопровод 217, выпускное отверстие 217а которого соединено с обратным трубопроводом 215 через кольцевое пространство 203. Таким образом, выпускное отверстие 217а редукционного обратного трубопровода 217 и выпускное отверстие 213а поворотного трубопровода 213 отделены друг от друга расстоянием, которое меньше осевой длины кольцевого пространства 203.
[37] Кроме того, регулирующий клапан 209 соединен с задней камерой 206 цилиндра через трубопровод 218 разгрузки давления. Вторая лицевая поверхность 202b поршня подвергается действию рабочего давления, которое может подаваться в заднюю камеру 206 цилиндра через трубопровод 218 разгрузки давления.
[38] Регулирующий клапан 209 может иметь два положения клапана. Положение клапана может включать положение обратного хода (справа), в котором давление, прикладываемое ко второй лицевой поверхности 202b поршня, понижается посредством трубопровода 218 разгрузки давления и обратного трубопровода 215, и положение прямого хода (слева), в котором рабочее давление прикладывается к задней камере 206 цилиндра через напорный трубопровод 212, регулирующий трубопровод 214, соединенный с напорным трубопроводом 212, и трубопровод 218 разгрузки давления. В результате поршень 202 приводится в действие в направлении, указанном стрелкой с двойной линией, против восстанавливающего давления, прикладываемого к первой лицевой поверхности 202а поршня.
[39] В то же время гидромолот 10 согласно изобретению содержит клапан 219 хода, который может иметь положение длинного хода и положение короткого хода.
[40] Действие клапана 219 хода определяется в ответ на давление, прикладываемое клапаном 220 регулирования потока, таким как электромагнитный клапан и электрический пропорциональный понижающий давление (electric proportional pressure reducing, EPPR) клапан, действующий под управлением принимающего MCU 240.
[41] Сторона впуска клапана 219 хода соединена с напорным трубопроводом 212 через напорный трубопровод 221 регулирования хода, а выпускная сторона клапана 219 хода соединена с поворотным трубопроводом 213 для регулирующего клапана 209 через дополнительный трубопровод 222.
[42] Как показано, когда клапан 220 регулирования потока открывается под управлением принимающего MCU 240, некоторый объем давления подается через открытый клапан 219 хода так, что поршень 202 действует с коротким ходом, а когда клапан 220 регулирования потока запирается под управлением принимающего MCU 240, давление через клапан 219 хода не подается, и, таким образом, поршень 202 действует с длинным ходом.
[43] Здесь ссылочная позиция 223 обозначает пружину, которая нагружена на верхней поверхности 219а клапана 219 хода для восстановления механического усилия в ответ на изменение в гидравлическом давлении.
[44] MCU 240 может представлять собой блок 300 управления, представленный на фиг. 1, или его часть.
[45]
[46] На фиг. 3 представлена структурная схема, на которой показана конфигурация блока датчика, представленного на фиг. 1.
[47] Со ссылкой на фиг. 3, блок 100 датчика может содержать датчик 310 вибрации, измеряющий вибрацию гидромолота 10 для вывода измерительного сигнала s1, и беспроводной передатчик 320, беспроводным образом выводящий измерительный сигнал s1.
[48] Датчик 310 вибрации может быть выполнен так, чтобы он мог выводить или не мог выводить измерительный сигнал s1 в зависимости от того, создается вибрация или нет. Блок 100 датчика может беспроводным образом выводить измерительный сигнал с использованием беспроводного передатчика 320. Блок 100 датчика может крепиться к основному корпусу 200 гидромолота 200, в котором создается вибрация, и блок 300 управления может быть также расположен вблизи места создания вибрации для приема измерительного сигнала s1 и определения времени эксплуатации, в течение которого гидромолот находился в эксплуатации. Поскольку блок 100 датчика передает измерительный сигнал s1 беспроводным образом, на него не оказывает электрического воздействия линия передачи.
[49]
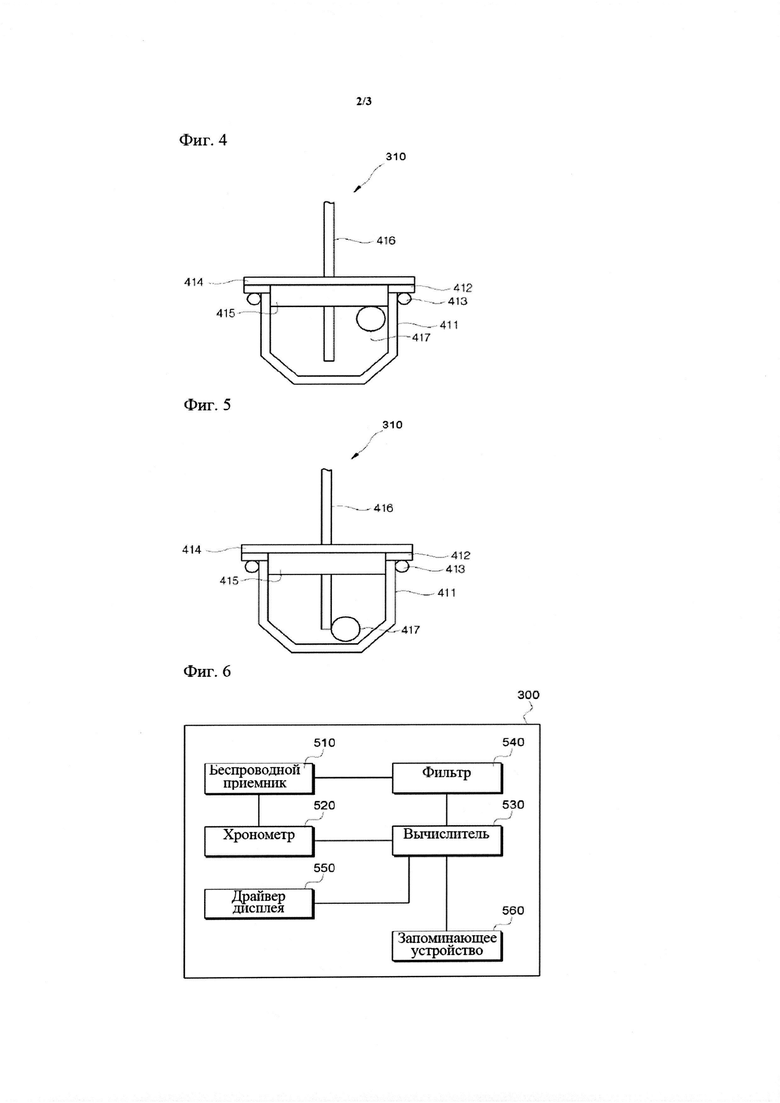
[50] На фиг. 4 представлена схема, на которой показан датчик вибрации, представленный на фиг. 3, когда гидромолот остановлен, согласно варианту осуществления, и на фиг. 5 представлена схема, на которой показан датчик вибрации, представленный на фиг. 3, когда гидромолот эксплуатируется, согласно варианту осуществления.
[51] Со ссылкой на фиг. 4 и 5, датчик вибрации может содержать металлический корпус 411, выступ 412, образованный на верхнем торце корпуса 411, пару ферромагнитных элементов 413 смещения, закрепленных под выступом 412 для обеспечения рабочей точки для электронного материала, металлическую крышку 414, закрывающую верхнюю часть корпуса 411, керамический изолятор 415, прикрепленный к нижней поверхности металлической крышки 414, металлический электрод 416, введенный в корпус 411 сквозь металлическую крышку 414 и керамический изолятор 415; и магнитный шарик 417, входящий в контакт и выходящий из контакта с металлическим электродом 416 для получения соответствующего сигнала, при этом керамический изолятор 415 предусмотрен для регулирования напряженности магнитного поля между металлической крышкой 414 и магнитным шариком 417.
[52] Датчик 310 вибрации действует так, что когда гидромолот не эксплуатируется, как показано на фиг. 4, магнитный шарик 417 перемещается и входит в контакт с керамическим изолятором 415, прикрепленным к нижней поверхности металлической крышки 414, под действием магнитного поля, приложенного между металлической крышкой 414 и магнитным шариком 417, а когда гидромолот эксплуатируется, магнитный шарик 417, находящийся в контакте с керамическим изолятором 415, прикрепленным к нижней поверхности металлической крышки 414, отделяется от керамического изолятора 415 по причине вибрации гидромолота и входит в контакт с металлическим электродом 416, расположенным в корпусе 411, за счет чего создается соответствующий сигнал. То есть сигнал создается тогда, когда магнитный шарик 417 находится в контакте с металлическим электродом 416, а когда магнитный шарик 417 не находится в контакте с металлическим электродом 416, сигнал не создается. Таким образом, вибрация, создаваемая в ходе эксплуатации отбойника 308, вызывает соединение и разъединение магнитного шарика 417 и металлического электрода 416, служащего в качестве переключателя для периодического создания сигнала, в результате чего можно измерить количество рабочих ходов поршня 202 гидромолота 10.
[53]
[54] На фиг. 6 представлена структурная схема, на которой показан блок управления, представленный на фиг. 1.
[55] Со ссылкой на фиг. 6, блок 300 управления может содержать беспроводной приемник 510, принимающий измерительный сигнал s1, хронометр 520, принимающий измерительный сигнал s1 от беспроводного приемника 510 для отсчета времени, в течение которого основной блок гидромолота находился в эксплуатации, и вычислитель 530, принимающий время эксплуатации от хронометра для вычисления времени эксплуатации, в течение которого гидромолот находился в эксплуатации.
[56] Беспроводной приемник 510 может принимать измерительный сигнал s1, переданный беспроводным образом от блока 100 датчика. Хронометр 520 может отсчитывать промежуток времени от момента, в который принят измерительный сигнал s1, до момента, в который измерительный сигнал не принят. Здесь вычислитель 530 может вычислять время эксплуатации, в течение которого гидромолот 10 фактически находился в эксплуатации, путем использования момента, в который измерительный сигнал s1 был принят от хронометра 520, и момента, в который измерительный сигнал s1 не был принят от хронометра. Кроме того, блок 300 управления может дополнительно содержать фильтр 540, проверяющий, был ли создан измерительный сигнал s1, или нет. Здесь если амплитуда принятого беспроводным образом измерительного сигнала s1 находится ниже порогового значения, фильтр может определять, что измерительный сигнал s1 создан не был. Здесь амплитуду измерительного сигнала s1 можно контролировать с использованием количества измерительных сигналов, созданных в течение предварительно определенного промежутка времени. То есть если количество созданных вибраций превышает пороговое значение, можно определить, что гидромолот 10 находился в эксплуатации.
[57] Блок 300 управления может также содержать драйвер 550 дисплея, соединенный с дисплейным блоком, для того чтобы обеспечить возможность отображения дисплейным блоком времени эксплуатации, вычисленного вычислителем 530. Драйвер 550 дисплея обеспечивает возможность раздельной демонстрации дисплейным блоком текущего времени эксплуатации и суммарного времени эксплуатации. Блок 300 управления может дополнительно содержать запоминающее устройство 560, которое может быть выполнено с возможностью сохранения времени эксплуатации из хронометра 520 и вычисления суммарного времени эксплуатации путем сложения всех сохраненных значений времени эксплуатации и принятого в данный момент времени эксплуатации.
[58]
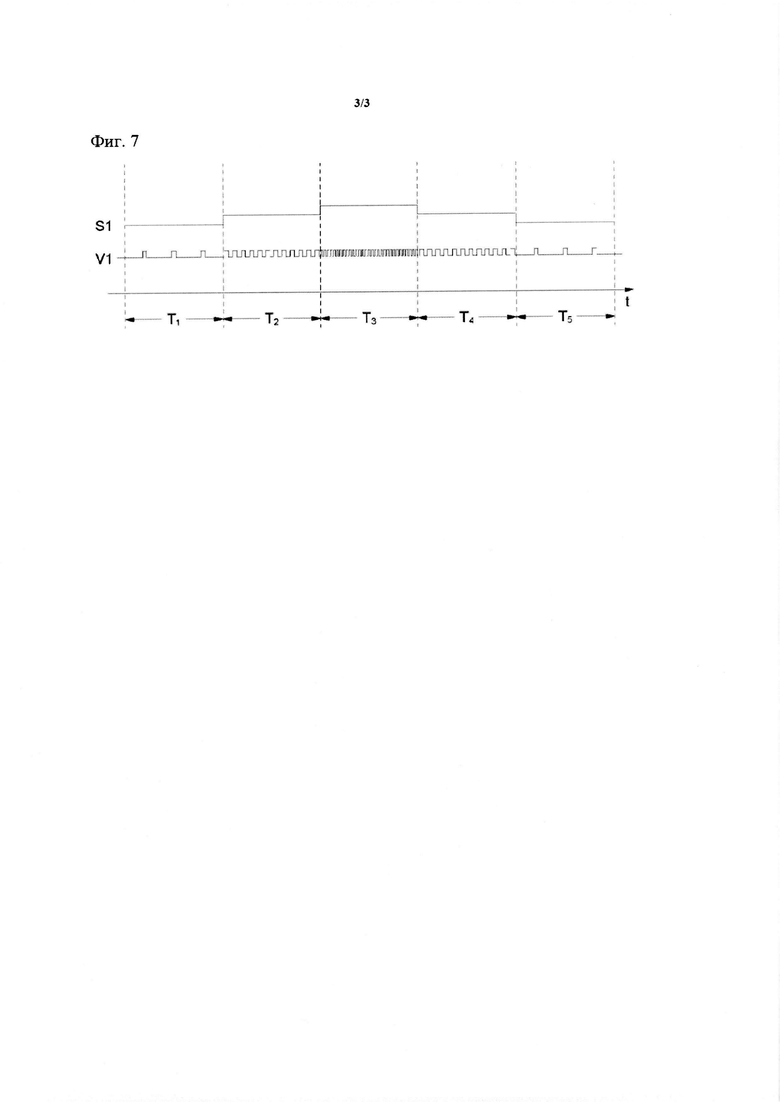
[59] На фиг. 7 представлена временная диаграмма, на которой показана процедура вычисления блоком управления времени эксплуатации на основе измеренного сигнала, выводимого из блока датчика, представленного на фиг. 1.
[60] Со ссылкой на фиг. 7, когда основной блок 200 гидромолота не эксплуатируется, блок 100 датчика не вибрирует и, таким образом, не выводит измерительный сигнал s1. В данном случае, когда блок 100 датчика содержит датчик 310 вибрации, представленный на фиг. 3, магнитный шарик 417 находится в контакте с керамическим изолятором, и, таким образом, датчик 310 вибрации не может создавать сигнал v1 вибрации и соответствующий измерительный сигнал s1, или, иначе, может выводить измерительный сигнал с уровнем ниже порогового значения (T1). Когда начинается эксплуатация основного блока 200 гидромолота, по причине действия поршня создается вибрация, и, таким образом, блок 100 датчика может обнаруживать вибрацию основного блока 200 гидромолота. Если амплитуда вибрации превышает пороговое значение, блок 100 датчика может определять, что основной блок 200 находится в эксплуатации, и выводить соответствующий измерительный сигнал s1. В случае если блок 100 датчика содержит датчик 310 вибрации, представленный на фиг. 4, когда основной блок 200 гидромолота вибрирует, магнитный шарик 417, который находился в контакте с керамическим изолятором 415, отделяется от керамического изолятора 415 и многократно входит в контакт и выходит из контакта с металлическим электродом 416, размещенным в корпусе 411, за счет чего многократно создаются прерывистые сигналы v1 вибрации. Дополнительно, измерительный сигнал s1, соответствующий сигналу v1 вибрации, может быть выведен с уровнем, превышающим пороговое значение (T2). Когда основной блок 200 перемещается в местоположение подстилающих пород и начинает дробить подстилающие породы, вибрация усиливается. В данном случае, когда блок 100 датчика содержит датчик 310 вибрации, представленный на фиг. 3, количество приведений магнитного шарика 417 в контакт/выводов из контакта с металлическим электродом 416 может увеличиться, делая более коротким цикл включения/отключения сигнала, содержащего импульсы включения/отключения. Таким образом, амплитуда измерительного сигнала s1 может быть дополнительно повышена (Т3). Когда дробление подстилающих пород завершается, амплитуда измерительного сигнала s1, выводимого из блока 100 датчика, может быть снижена. В случае, когда блок 100 датчика содержит датчик 310 вибрации, представленный на фиг. 4, количество приведений магнитного шарика 417 в контакт/выводов из контакта с металлическим электродом 416 может уменьшаться, делая более длинным цикл включения/отключения сигнала вибрации v1, содержащего импульсы включения/отключения. Таким образом, амплитуда измерительного сигнала s1 может быть дополнительно понижена (Т4). Когда основной блок 200 гидромолота останавливается, основной блок 200 не вибрирует, и, таким образом, блок 100 датчика не может выводить измерительный сигнал. В случае, когда блок 100 датчика содержит датчик 310 вибрации, представленный на фиг. 3, основной блок 200 не вибрирует, и магнитный шарик 417 входит в контакт с керамическим изолятором 415, и, таким образом, измерительный сигнал больше не может выводиться, или, иначе, он может выводиться с уровнем ниже порогового значения (Т5).
[61] Затем блок 300 управления может принимать измерительный сигнал s1 от блока 100 датчика для вычисления времени эксплуатации основного блока 200 гидромолота. При приеме измерительного сигнала s1 блок 300 управления может определять, что основной блок 200 находился в эксплуатации. Кроме того, если измерительный сигнал s1 не принимается в течение предварительно определенного промежутка времени или более, или измерительный сигнал принимается с уровнем ниже порогового значения, блок управления может определять, что основной блок был остановлен. Кроме того, блок 300 управления может вычислять время эксплуатации, в течение которого находился в эксплуатации основной блок 200 путем использования разности между моментом, в который основной блок 200 определен как остановленный, и моментом, в который основной блок определен, как находящийся в эксплуатации. Кроме того, блок 300 управления может вычислять совокупное время эксплуатации основного блока 200 путем сложения всех периодов эксплуатации. Кроме того, блок 300 управления может вычислять время дробления из времени эксплуатации путем вычисления времени, в течение которого основной блок дробит подстилающие породы. Здесь время эксплуатации гидромолота 10 может быть вычислено путем сложения промежутков Т2—Т4 времени, и время дробления для гидромолота может быть вычислено путем использовании только промежутка Т3 времени. Однако вычисление времени эксплуатации этим не ограничивается. Время эксплуатации можно контролировать с помощью хронометра 520, представленного на фиг. 6.
[62]
[63] Функции различных элементов, представленных в графических материалах изобретения, могут обеспечиваться путем использования специализированного аппаратного обеспечения, а также аппаратного обеспечения, способного исполнять программное обеспечение, совместно с надлежащим программным обеспечением. При обеспечении посредством процессора, эти функции могут быть обеспечены одним выделенным процессором, одним совместно используемым процессором, или частично совместно используемыми отельными процессорами.
[64] В формуле изобретения элементы, описанные как средства для выполнения конкретных функций, включают любые способы, способные выполнять данные конкретные функции, и эти элементы могут содержать комбинацию элементов схемы, выполняющих конкретные функции, или программное обеспечение любого типа, в том числе программно-аппаратное обеспечение, систему микрокоманд и т. д., объединенных с надлежащими схемами для исполнения программного обеспечения для выполнения конкретных функций.
[65] Используемое в данном документе выражение «один вариант осуществления» или т. п. и его производные означают, что конкретные признаки, конструкции, характеристики и т. п. в отношении этого варианта осуществления являются включенными в по меньшей мере один из вариантов осуществления, относящийся к принципу изобретения. Таким образом, выражения «один вариант осуществления» и другие модификации, раскрытые во всем данном описании, необязательно обозначают одинаковые варианты осуществления.
[66] Используемый в данном документе термин «соединенный с» и его производные означает, что один элемент непосредственно соединен с другим элементом, или, в другом случае, соединен с другим элементом опосредованно, через другой элемент. Используемые в данном документе формы единственного числа предназначены для включения форм множественного числа, если из контекста явно не следует иное. Далее будет понятно, что термины «содержит» и/или «содержащий», или «включает» и/или «включающий» при использовании в данном описании точно определяют наличие указанных элементов, этапов, операций и устройств, но не исключают наличия или добавления одного или нескольких других элементов, этапов, операций и устройств.
Изобретение относится к средствам для дробления подстилающих пород. Техническим результатом является расширение арсенала технических средств для дробления пород. В частности, предложен гидромолот, содержащий: основной блок (200); блок (100) датчика, имеющий датчик вибрации (310), измеряющий вибрацию в основном блоке (200), когда объекты, подлежащие дроблению, в том числе подстилающие породы, подвергаются дроблению, для вывода измерительного сигнала, и беспроводной передатчик (320), беспроводным образом выводящий измерительный сигнал; и блок управления (300), принимающий измерительный сигнал от блока (100) датчика для вычисления времени, в течение которого основной блок (200) вибрирует, и, таким образом, вычисления времени эксплуатации. При этом датчик вибрации (310) содержит металлический корпус (411), выступ (412), образованный на верхнем торце корпуса (411), пару ферромагнитных элементов (413) смещения, закрепленных под выступом (412) для создания рабочей точки для электронного материала, металлическую крышку (414), закрывающую верхнюю часть корпуса (411), керамический изолятор (415), прикрепленный к нижней поверхности металлической крышки (414), металлический электрод (416), введенный в корпус (411) сквозь металлическую крышку (414) и керамический изолятор (415), и магнитный шарик (417), входящий в контакт и выходящий из контакта с металлическим электродом (416) для получения соответствующего сигнала. Причем керамический изолятор (415) предусмотрен для регулирования напряженности магнитного поля между металлической крышкой (414) и магнитным шариком (417). 4 з.п. ф-лы, 7 ил.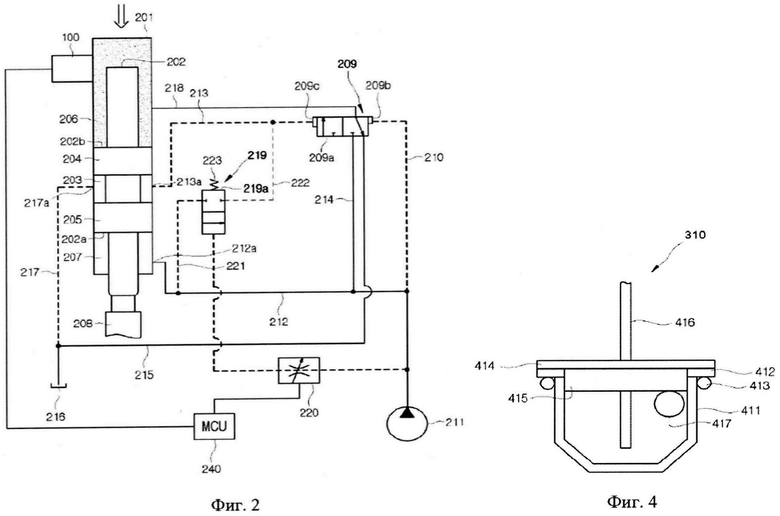
1. Гидромолот (10), содержащий: основной блок (200); блок (100) датчика, имеющий датчик (310) вибрации, измеряющий вибрацию в основном блоке (200), когда объекты, подлежащие дроблению, в том числе подстилающие породы, подвергаются дроблению, для вывода измерительного сигнала, и беспроводной передатчик (320), беспроводным образом выводящий измерительный сигнал; и блок (300) управления, принимающий измерительный сигнал от блока (100) датчика для вычисления времени, в течение которого основной блок (200) вибрирует, и, таким образом, вычисления времени эксплуатации, отличающийся тем, что датчик (310) вибрации содержит металлический корпус (411), выступ (412), образованный на верхнем торце корпуса (411), пару ферромагнитных элементов (413) смещения, закрепленных под выступом (412) для создания рабочей точки для электронного материала, металлическую крышку (414), закрывающую верхнюю часть корпуса (411), керамический изолятор (415), прикрепленный к нижней поверхности металлической крышки (414), металлический электрод (416), введенный в корпус (411) сквозь металлическую крышку (414) и керамический изолятор (415), и магнитный шарик (417), входящий в контакт и выходящий из контакта с металлическим электродом (416) для получения соответствующего сигнала, при этом керамический изолятор (415) предусмотрен для регулирования напряженности магнитного поля между металлической крышкой (414) и магнитным шариком (417).
2. Гидромолот по п. 1, отличающийся тем, что основной блок (200) содержит: цилиндр (201); поршень (202), размещенный в цилиндре (201) для возвратно-поступательного перемещения в осевом направлении в цилиндре, при этом поршень содержит: первую лицевую поверхность (202а) поршня, ориентированную так, что давление прикладывается в направлении обратного хода поршня, вторую лицевую поверхность (202b) поршня, ориентированную так, что давление прикладывается в направлении прямого хода, и кольцевое пространство (203), расположенное между первой лицевой поверхностью (202а) поршня и второй лицевой поверхностью (202b) поршня; отбойник (208), задействуемый для оказания ударного воздействия и дробления подстилающих пород с помощью возвратно-поступательного перемещения поршня (202); напорный трубопровод (212), выполненный с возможностью доставки рабочего давления через его выпускное отверстие, соединенное с цилиндром (201); редукционный обратный трубопровод (217), выполненный с возможностью понижения давления через его выпускное отверстие, соединенное с цилиндром (201); регулирующий клапан (209), содержащий внутри себя регулирующий плунжер (209а), малую поверхность (209b) регулирующего плунжера, задействуемую для перемещения регулирующего плунжера (209а) в положение обратного хода, и большую поверхность (209с) регулирующего плунжера, задействуемую для перемещения регулирующего плунжера (209a) в положение прямого хода или положение обратного хода; клапан (219) хода, содержащий сторону впуска, сторону выпуска и нижнюю сторону, при этом сторона впуска соединена с напорным трубопроводом (212), соединенным с гидравлическим насосом (211) через напорный трубопровод (221) регулирования хода, при этом сторона выпуска соединена с поворотным трубопроводом (213) для регулирующего клапана (209) через дополнительный трубопровод (222), соединенный с регулирующим клапаном (209), и нижняя сторона соединена с гидравлическим насосом через клапан (220) регулирования потока, приводимый в действие под управлением принимающего MCU (240); и пружину (223), нагруженную на верхней поверхности (219а) клапана (219) хода для восстановления механического усилия в ответ на изменение в гидравлическом давлении.
3. Гидромолот по п. 1, отличающийся тем, что блок (300) управления содержит: беспроводной приемник (510), принимающий измерительный сигнал, соответствующий вибрации, от беспроводного передатчика (320); хронометр (520), принимающий измерительный сигнал, соответствующий вибрации, от беспроводного приемника (510) и выводящий информацию об измеренном времени путем измерения промежутка (Т2, Т4) времени, в котором передается измерительный сигнал, соответствующий вибрации выше порогового значения, промежутка (Т3) времени дробления, в котором передается измерительный сигнал, соответствующий вибрации выше порогового значения, и промежутка (Т1, Т5) времени, в котором измерительный сигнал, соответствующий вибрации, или измерительный сигнал, соответствующий вибрации ниже порогового значения, не передается; фильтр (540), принимающий измерительный сигнал, соответствующий вибрации, от беспроводного приемника (510) и выводящий сигнал для определения амплитуды измерительного сигнала; вычислитель (530), принимающий информацию об измеренном времени от хронометра (520), принимающего сигнал для определения амплитуды измерительного сигнала от фильтра (540), и вычисляющий время эксплуатации (Т1 – Т5), включая промежуток (Т3) времени дробления, в соответствии с вибрацией гидромолота; и запоминающее устройство (560), сохраняющее время эксплуатации (Т1 – Т5), переданное от вычислителя (530).
4. Гидромолот по п. 3, отличающийся тем, что вычислитель (530) выполнен с возможностью вычисления времени эксплуатации (T1 - T5) путем вычисления промежутка (T1, T5) времени эксплуатации без измерительного сигнала, соответствующего вибрации, или при вибрации ниже порогового значения; промежутка (T2, T4) времени эксплуатации при вибрации выше порогового значения; а также промежутка (T3) времени дробления объекта, подлежащего дроблению, при вибрации выше порогового значения.
5. Гидромолот по п. 3, отличающийся тем, что блок (300) управления дополнительно содержит драйвер (550) дисплея, отображающий время эксплуатации, при этом драйвер (550) дисплея выполнен с возможностью отображения суммарного времени эксплуатации, в котором складываются время эксплуатации, сохраненное в запоминающем устройстве (560), и текущее время эксплуатации; при этом текущее время эксплуатации состоит из промежутка (T1, T5) времени эксплуатации без измерительного сигнала, соответствующего вибрации, или при вибрации ниже порогового значения, промежутка (T2, T4) времени эксплуатации при вибрации выше порогового значения и промежутка (T3) времени дробления объекта, подлежащего вибрации, при вибрации выше порогового значения.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРОМОЛОТОМ | 2012 |
|
RU2531772C2 |
| Гидромолот | 1987 |
|
SU1439177A2 |
| US 5174387 A1, 29.12.1992 | |||
| JP 2008506543 A, 06.03.2008. | |||

