Ссылка на родственную заявку
В настоящей заявке испрашивается приоритет по заявке на патент США 15/287,059, озаглавленной «SLIP CONTROL SYSTEM FOR OFF-ROAD VEHICLE», поданной 6 октября 2016 года, которая включена сюда путем ссылки во всей полноте.
Уровень техники
Изобретение в общем относится к системе управления пробуксовыванием для внедорожного транспортного средства.
Внедорожные транспортные средства, такие как сельскохозяйственные тракторы, можно задействовать в многочисленных почвенных условиях. Например, трактор можно везти по полю, имеющему мягкую почву (например, вследствие высокого содержания влаги в почве). В определенных условиях мягкой почвы колеса и/или гусеницы трактора могут пробуксовывать относительно поверхности почвы. То есть поверхность сцепления с землей колеса или гусеницы может двигаться с более высокой скоростью, чем скорость трактора относительно земли. В то время как трактор может успешно двигаться по полю, испытывая в то же время низкую или среднюю степень пробуксовывания, высокая степень пробуксовывания может вызывать уплотнение и/или колейность почвы под колесами или гусеницами трактора. В результате может снижаться урожай сельскохозяйственных культур, находящихся в пределах уплотненной и/или изрытой колеями почвы. Кроме того, высокая степень пробуксовывания может вызывать увязание трактора в почве (например, когда колеса и/или гусеницы зарываются в поверхность почвы). К сожалению, процесс извлечения увязшего трактора может занимать значительное время, тем самым уменьшая эффективность полевых работ (например, механическую обработку почвы, посевные работы, уборочные работы и т.д.).
Сущность изобретения
В одном варианте осуществления система управления пробуксовыванием для внедорожного транспортного средства содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы, и/или второго сигнала, указывающего темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Система управления также выполнена с возможностью выдачи третьего сигнала, указывающего первое действие, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и/или темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, и нет, если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение, при этом второе пороговое значение больше, чем первое пороговое значение, а четвертое пороговое значение больше, чем третье пороговое значение. Кроме того, система управления выполнена с возможностью выдачи четвертого сигнала, указывающего второе действие, отличающееся от первого действия, если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение.
В еще одном варианте осуществления система управления пробуксовыванием для внедорожного транспортного средства содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Система управления также выполнена с возможностью выдачи второго сигнала, указывающего первое действие, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем первая пороговая продолжительность времени, при этом второе пороговое значение больше, чем первое пороговое значение. Кроме того, система управления выполнена с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, если величина пробуксовывания больше, чем второе пороговое значение.
В дополнительном варианте осуществления система управления пробуксовыванием для внедорожного транспортного средства содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего определенную величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Система управления также выполнена с возможностью выдачи второго сигнала, указывающего первое действие, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания внедорожного транспортного средства относительно поверхности почвы больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и нет, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение, при этом второе пороговое значение больше, чем первое пороговое значение. Кроме того, система управления выполнена с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение.
Краткое описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего изобретения станут лучше понятны при чтении следующего подробного описания со ссылкой на сопровождающие чертежи, на которых одинаковые цифры отображают одинаковые детали на всех чертежах, на которых:
На фиг. 1 представлено схематичное изображение варианта осуществления внедорожного транспортного средства и сельскохозяйственного орудия на сельскохозяйственном поле;
На фиг. 2 представлено схематичное изображение варианта осуществления системы управления пробуксовыванием, которую можно использовать для управления внедорожным транспортным средством и сельскохозяйственным орудием по фиг. 1;
На фиг. 3 представлена блок-схема варианта осуществления системы управления, которую можно использовать в системе управления пробуксовыванием по фиг. 2;
На фиг. 4 представлена блок-схема варианта осуществления способа управления пробуксовыванием внедорожного транспортного средства;
На фиг. 5 представлена блок-схема еще одного варианта осуществления способа управления пробуксовыванием внедорожного транспортного средства; а
На фиг. 6 представлена блок-схема дополнительного варианта осуществления способа управления пробуксовыванием внедорожного транспортного средства.
Подробное описание изобретения
На фиг. 1 представлено схематичное изображение варианта осуществления внедорожного транспортного средства 10 и сельскохозяйственного орудия 12 на сельскохозяйственном поле 14. внедорожное транспортное средство 10 (например, трактор или другой тягач) выполнено с возможностью буксирования сельскохозяйственного орудия 12 по всему полю 14 вдоль направления движения 16. В некоторых вариантах осуществления внедорожное транспортное средство 10 направляют (например, оператор или автоматизированная система) двигаться по полю вдоль по существу параллельных рядов 18. Однако, необходимо понимать, что в альтернативных вариантах осуществления внедорожное транспортное средство можно направлять двигаться по полю по другим маршрутам (например, по спиральной траектории и т.д.). Следует понимать, что сельскохозяйственным орудием 12 может быть любое подходящее орудие для выполнения сельскохозяйственных работ по всему полю 14. Например, в некоторых вариантах осуществления сельскохозяйственным орудием 12 среди прочего может быть почвообрабатывающее орудие, орудие для внесения удобрений, посевное или посадочное орудие или уборочное орудие. В то время как в проиллюстрированном варианте осуществления сельскохозяйственное орудие 12 буксируется внедорожным транспортным средством 10, необходимо понимать, что в альтернативных вариантах осуществления сельскохозяйственное орудие может быть интегрировано во внедорожное транспортное средство.
Когда внедорожное транспортное средство 10 и сельскохозяйственное орудие 12 двигаются по полю, внедорожное транспортное средство 10 и сельскохозяйственное орудие 12 могут встречать различные почвенные условия. Например, внедорожное транспортное средство 10 и сельскохозяйственное орудие 12 могут встречать участки 20, на которых внедорожное транспортное средство (например, по меньшей мере одно колесо или гусеница внедорожного транспортного средства) испытывают среднюю степень пробуксовывания (например, пробуксовывание от 15 процентов до 30 процентов). Кроме того, внедорожное транспортное средство 10 и сельскохозяйственное орудие 12 могут встречать участки 22, на которых внедорожное транспортное средство (например, по меньшей мере одно колесо или гусеница внедорожного транспортного средства) испытывают высокую степень пробуксовывания (например, пробуксовывание больше, чем 30 процентов). Степень пробуксовывания может зависеть среди других факторов от типа почвы, содержания влаги в почве, наклона/уклона поля 14, массы внедорожного транспортного средства 10, тяговой нагрузки, прикладываемой сельскохозяйственным орудием 12 к внедорожному транспортному средству 10, и типа и/или количества растительных остатков на поверхности поля 14. В то время как внедорожное транспортное средство 10 и орудие 12 может успешно двигаться по полю, испытывая в то же время низкую степень пробуксовывания (например, пробуксовывание меньше, чем 15 процентов) или среднюю степень пробуксовывания, высокая степень пробуксовывания может вызывать увязание внедорожного транспортного средства 10 в почве (например, когда колеса и/или гусеницы внедорожного транспортного средства зарываются в поверхность почвы). Соответственно, в некоторых вариантах осуществления внедорожное транспортное средство 10 содержит систему управления пробуксовыванием, выполненную с возможностью существенного уменьшения или устранения вероятности увязания внедорожного транспортного средства в почве. В результате можно существенно повысить эффективность сельскохозяйственных работ (например, механической обработки почвы, посевных работ, уборочных работ и т.д.).
В некоторых вариантах осуществления система управления пробуксовыванием содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы, и/или второго сигнала, указывающего темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Система управления также выполнена с возможностью выдачи третьего сигнала, указывающего первое действие (например, оповещение оператора, включение системы полного привода, включение системы блокировки дифференциала и т.д.), если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и/или темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, и нет, если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение. Кроме того, система управления выполнена с возможностью выдачи четвертого сигнала, указывающего второе действие, отличающееся от первого действия, (например, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, остановку внедорожного транспортного средства и т.д.), если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение.
В дополнительных вариантах осуществления система управления пробуксовыванием содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Система управления также выполнена с возможностью выдачи второго сигнала, указывающего первое действие (например, оповещение оператора, включение системы полного привода, включение системы блокировки дифференциала и т.д.), если величина пробуксовывания больше, чем первое пороговое значение, и меньше, чем второе пороговое значение в течение более, чем пороговая продолжительность времени. Кроме того, система управления выполнена с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, (например, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, остановку внедорожного транспортного средства и т.д.), если величина пробуксовывания больше, чем второе пороговое значение.
Кроме того, в некоторых вариантах осуществления система управления пробуксовыванием содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего определенную величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Система управления также выполнена с возможностью выдачи второго сигнала, указывающего первое действие, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания внедорожного транспортного средства относительно поверхности почвы больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и нет, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение. Например, первое действие может включать оповещение оператора, что определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем первое пороговое значение, включение системы полного привода, включение системы блокировки дифференциала или их комбинацию. Кроме того, система управления выполнена с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, (например, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, остановку внедорожного транспортного средства и т.д.), если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение.
Как обсуждалось выше, в определенных условиях мягкой почвы по меньшей мере одно колесо и/или гусеница внедорожного транспортного средства может пробуксовывать относительно поверхности почвы. Пробуксовывание происходит, когда поверхность сцепления с землей колеса или гусеницы двигается с более высокой скоростью, чем скорость относительно земли внедорожного транспортного средства. В рамках изобретения «величина пробуксовывания» относится к разнице в процентах между скоростью поверхности сцепления с землей колеса или гусеницы и скоростью относительно земли внедорожного транспортного средства. Например, если скорость поверхности сцепления с землей колеса или гусеницы равна скорости относительно земли внедорожного транспортного средства, величина пробуксовывания составляет 0 процентов (т.е. Пробуксовывание отсутствует). Наоборот, если скорость поверхности сцепления с землей колеса или гусеницы больше, чем ноль (например, километров в час), а скорость относительно земли внедорожного транспортного средства составляет ноль (например, километров в час), величина пробуксовывания составляет 100 процентов (т.е., полное пробуксовывание). Только в качестве примера, величина пробуксовывания меньше, чем 15 процентов может представлять низкую степень пробуксовывания, величина пробуксовывания между 15 процентов и 30 процентов может представлять среднюю степень пробуксовывания, а величина пробуксовывания больше, чем 30 процентов может представлять высокую степень пробуксовывания. Однако, необходимо понимать, что диапазоны пробуксовывания могут изменять в зависимости от состояния почвы и/или рабочих условий внедорожного транспортного средства.
В определенных почвенные условиях величина пробуксовывания может быть меньше, чем ноль (т.е., отрицательная). То есть скорость относительно земли внедорожного транспортного средства может быть больше, чем скорость поверхности сцепления с землей колеса или гусеницы. Пока величина пробуксовывания отрицательная, внедорожное транспортное средство скользит относительно поверхности поля, уменьшая тем самым управление внедорожным транспортным средством. Как обсуждается подробно ниже, систему управления пробуксовыванием можно выполнить с возможностью существенного уменьшения скольжения, тем самым улучшая управление внедорожным транспортным средством.
Кроме того, в рамках изобретения «темп изменения пробуксовывания» относится к изменению величины пробуксовывания в качестве функции времени. В качестве примера, высокий темп изменения пробуксовывания (например, больше, чем 5 процентов в минуту) может быть показателем почвенных условий, в которых вероятно происходит высокая степень пробуксовывания. Соответственно, как обсуждается подробно ниже, систему управления пробуксовыванием можно выполнить с возможностью предупреждения оператора и/или с возможностью управления внедорожным транспортным средством и/или сельскохозяйственным орудием, если обнаружен высокий темп изменения пробуксовывания.
В некоторых вариантах осуществления внедорожное транспортное средство выполнено с возможностью автономной работы (например, без оператора, находящегося в кабине внедорожного транспортного средства). Соответственно, автоматическая система может направлять внедорожное транспортное средство и сельскохозяйственное орудие по всему полю без прямого управления оператором. В таких вариантах осуществления автономное внедорожное транспортное средство выполнено с возможностью обмена данными с базовой станцией. Как обсуждается подробно ниже, система управления системы управления пробуксовыванием может содержать контроллер внедорожного транспортного средства, контроллер базовой станции или их комбинацию. В дополнительных вариантах осуществления внедорожным транспортным средством можно управлять по существу вручную. То есть оператор может находиться внутри кабины внедорожного транспортного средства, и оператор может вручную направлять внедорожное транспортное средство по всему полю. В таких вариантах осуществления система управления пробуксовыванием может предупреждать оператора об определенных условиях пробуксовывания и/или автоматически управлять внедорожным транспортным средством и/или сельскохозяйственным орудием для уменьшения пробуксовывания. Кроме того, в некоторых вариантах осуществления внедорожное транспортное средство можно выполнить с возможностью полуавтономной работы. Например, оператор внутри кабины может направлять внедорожное транспортное средство в начальное положение в пределах или около поля, а автоматизированная система может направлять внедорожное транспортное средство по выбранному/запланированному маршруту через поле, в то время как оператор отслеживает работу внедорожного транспортного средства и/или орудия. В таких вариантах осуществления система управления пробуксовыванием может предупреждать оператора об определенных условиях пробуксовывания и/или автоматически управлять внедорожным транспортным средством и/или сельскохозяйственным орудием для уменьшения пробуксовывания.
На фиг. 2 представлено схематичное изображение варианта осуществления системы 24 управления пробуксовыванием, которую можно использовать для управления внедорожным транспортным средством 10 и сельскохозяйственным орудием по фиг. 1. В проиллюстрированном варианте осуществления система 24 управления пробуксовыванием содержит систему 26 управления (например, установленную на внедорожном транспортном средстве 10), а внедорожное транспортное средство 10 содержит первый приемопередатчик 28, выполненный с возможностью установления беспроводного канала связи со вторым приемопередатчиком 30 базовой станции 32. Следует понимать, что первый и второй приемопередатчики могут работать в любом подходящем частотном диапазоне в пределах электромагнитного спектра. Например, в некоторых вариантах осуществления приемопередатчики могут передавать и принимать радиоволны в пределах частотного диапазона от приблизительно 1 Гц до приблизительно 10 Гц. Кроме того, первый и второй приемопередатчики могут использовать любой подходящий протокол связи, например, стандартный протокол (например, Wi-Fi, Bluetooth и т.д.) или собственный протокол.
В проиллюстрированном варианте осуществления внедорожное транспортное средство 10 содержит устройство 34 локализации в пространстве, которое установлено на внедорожном транспортном средстве 10 и выполнено с возможностью определения положения внедорожного транспортного средства 10. Следует понимать, что устройство локализации в пространстве может содержать любую подходящую систему, выполненную с возможностью определения положения внедорожного транспортного средства, такую как например, система глобального позиционирования (GPS). В некоторых вариантах осуществления устройство 34 локализации в пространстве можно выполнить с возможностью определения положения внедорожного транспортного средства относительно фиксированной точки в пределах поля (например, посредством фиксированного радио приемопередатчика). Соответственно, устройство 34 локализации в пространстве можно выполнить с возможностью определения положения внедорожного транспортного средства относительно фиксированной глобальной системы координат (например, посредством GPS) или фиксированной локальной системы координат. В некоторых вариантах осуществления первый приемопередатчик 28 выполнен с возможностью передачи сигнала, указывающего положение внедорожного транспортного средства 10, на приемопередатчик 30 базовой станции 32.
Кроме того, внедорожное транспортное средство 10 содержит блок 36 датчиков. В некоторых вариантах осуществления блок датчиков выполнен с возможностью облегчения определения величины пробуксовывания и/или темпа изменения пробуксовывания внедорожного транспортного средства. Например, блок 36 датчиков может содержать множество датчиков (например, инфракрасных датчиков, ультразвуковых датчиков, магнитных датчиков и т.д.), каждый из которых выполнен с возможностью отслеживания скорости вращения соответствующего колеса или гусеницы. Как обсуждается подробно ниже, скорость поверхности сцепления с землей колеса или гусеницы можно определить по меньшей мере частично на основании определенной скорости вращения, а величину пробуксовывания и темп изменения пробуксовывания можно определить путем сравнения скорости поверхности сцепления с землей колеса или гусеницы со скоростью относительно земли внедорожного транспортного средства 10.
В проиллюстрированном варианте осуществления внедорожное транспортное средство 10 содержит систему 38 рулевого управления, выполненную с возможностью управления направлением движения внедорожного транспортного средства 10, и систему 40 управления скоростью, выполненную с возможностью управления скоростью внедорожного транспортного средства 10. Кроме того, внедорожное транспортное средство 10 содержит систему 42 управления тяговым усилием, выполненную с возможностью управления распределением мощности двигателя внедорожного транспортного средства на колеса или гусеницы внедорожного транспортного средства, и систему 44 управления орудием, выполненную с возможностью управления работой орудия (например, буксируемого внедорожным транспортным средством 10). Кроме того, система 26 управления содержит контроллер 46, соединенный с возможностью обмена данными с первым приемопередатчиком 28, с устройством 34 локализации в пространстве, с блоком 36 датчиков, с системой 38 рулевого управления, с системой 40 управления скоростью, с системой 42 управления тяговым усилием и с системой 44 управления орудием. В некоторых вариантах осуществления контроллер 46 выполнен с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства 10 относительно поверхности почвы (например, из блока 36 датчиков), и с возможностью приема второго сигнала, указывающего темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы (например, из блока 36 датчиков). В таких вариантах осуществления контроллер 46 выполнен с возможностью выдачи третьего сигнала, указывающего первое действие (например, оповещение оператора, включение системы полного привода и/или системы блокировки дифференциала посредством системы 42 управления тяговым усилием и т.д.), если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и/или темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, и нет, если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение. Контроллер 46 также выполнен с возможностью выдачи четвертого сигнала, указывающего второе действие, отличающееся от первого действия, (например, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ посредством системы 44 управления орудием, остановку внедорожного транспортного средства посредством системы 40 управления скоростью и т.д.), если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение.
В дополнительных вариантах осуществления контроллер 46 выполнен с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы (например, из блока 36 датчиков). В таких вариантах осуществления контроллер 46 выполнен с возможностью выдачи второго сигнала, указывающего первое действие (например, оповещение оператора, включение системы полного привода и/или системы блокировки дифференциала посредством системы 42 управления тяговым усилием и т.д.), если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем пороговая продолжительность времени. Контроллер 46 также выполнен с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, (например, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ посредством системы 44 управления орудием, остановку внедорожного транспортного средства посредством системы 40 управления скоростью и т.д.), если величина пробуксовывания больше, чем второе пороговое значение.
Кроме того, в некоторых вариантах осуществления контроллер 46 выполнен с возможностью приема первого сигнала, указывающего определенную величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы (например, посредством блока 36 датчиков). В таких вариантах осуществления контроллер 46 выполнен с возможностью выдачи второго сигнала, указывающего первое действие (например, оповещение оператора, включение системы полного привода и/или системы блокировки дифференциала посредством системы 42 управления тяговым усилием и т.д.), если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания внедорожного транспортного средства относительно поверхности почвы больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и нет, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение. Контроллер 46 также выполнен с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, (например, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ посредством системы 44 управления орудием, остановку внедорожного транспортного средства посредством системы 40 управления скоростью и т.д.), если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение.
В некоторых вариантах осуществления контроллером 46 является электронный контроллер, имеющий электрическую цепь, выполненную с возможностью обработки данных из приемопередатчика 28, устройство 34 локализации в пространстве, блок 36 датчиков или их комбинацию, среди других компонентов внедорожного транспортного средства 10. В проиллюстрированном варианте осуществления контроллер 46 содержит процессор, такой как проиллюстрированный микропроцессор 48, и устройство 50 памяти. Контроллер 46 также может содержать одно или более устройств хранения данных и/или другие подходящие компоненты. Процессор 48 можно использовать для выполнения программного обеспечения, такого как программное обеспечение для управления внедорожным транспортным средством 10 и так далее. Кроме того, процессор 48 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных микросхем (ASICS) или какую-то их комбинацию. Например, процессор 48 может содержать один или более процессоров с сокращенным набором команд (RISC).
Устройство 50 памяти может содержать энергозависимую память, такую как оперативная память (RAM), и/или энергонезависимую память, такую как ROM. В устройстве 50 памяти можно хранить множество информации, и его можно использовать для разных целей. Например, в устройстве 50 памяти можно хранить выполняемые процессором команды (например, встроенные программы или программное обеспечение) для выполнения процессором 48, такие как команды для управления внедорожным транспортным средством 10. Устройство (устройства) хранения данных (например, энергонезависимое запоминающее устройство) может содержать постоянную память (ROM), флэш-память, накопитель на жестких дисках или любой другой подходящий оптический, магнитный или твердотельный носитель данных или их комбинацию. В устройстве (устройствах) хранения данных можно хранить данные (например, величину ожидаемого пробуксовывания, карты почвы и т.д.), команды (например, программное обеспечение или встроенные программы для управления внедорожным транспортным средством и т.д.) и любые другие подходящие данные.
В проиллюстрированном варианте осуществления система 38 рулевого управления содержит систему 52 управления углом колес, систему 54 дифференциального торможения и систему 56 векторизации крутящего момента. Система 52 управления углом колес может автоматически поворачивать одно или более колес или гусениц внедорожного транспортного средства (например, посредством гидравлических приводов) для направления внедорожного транспортного средства по траектории через поле (например, вокруг участка, имеющего высокую ожидаемую величину пробуксовывания). В качестве примера, система 52 управления углом колес может поворачивать передние колеса/гусеницы, задние колеса/гусеницы и/или промежуточные колеса/гусеницы внедорожного транспортного средства либо индивидуально, либо в группах. Система 54 дифференциального торможения может независимо изменять силу торможения на каждой боковой стороне внедорожного транспортного средства для направления внедорожного транспортного средства по траектории через поле. Аналогично, система 56 векторизации крутящего момента может дифференциально прикладывать крутящий момент двигателя к колесам и/или гусеницам на каждой боковой стороне внедорожного транспортного средства, тем самым направляя внедорожное транспортное средство по траектории через поле. В то время как проиллюстрированная система 38 рулевого управления содержит систему 52 управления углом колес, систему 54 дифференциального торможения и систему 56 векторизации крутящего момента, необходимо понимать, что в альтернативных вариантах осуществления может содержаться одна или две этих системы в любой подходящей комбинации. В дополнительных вариантах осуществления может содержаться система 38 рулевого управления, имеющая другие и/или дополнительные системы для облегчения направления внедорожного транспортного средства по траектории через поле (например, система управления с шарнирно-сочлененной рамой и т.д.).
В проиллюстрированном варианте осуществления система 40 управления скоростью содержит систему 58 управления эффективной мощностью двигателя, систему 60 управления коробкой передач и систему 62 управления торможением. Система 58 управления эффективной мощностью двигателя выполнена с возможностью изменения эффективной мощности двигателя для управления скоростью внедорожного транспортного средства. Например, система 58 управления эффективной мощностью двигателя может изменять положение дроссельной заслонки двигателя, топливо-воздушную смесь двигателя, синхронизацию двигателя и/или другие подходящие параметры двигателя для управления эффективной мощностью двигателя. Кроме того, система 60 управления коробкой передач может регулировать переключение передач в коробке передач для управления скоростью внедорожного транспортного средства. Кроме того, система 62 управления торможением может регулировать силу торможения, тем самым управляя скоростью внедорожного транспортного средства 10. В то время как проиллюстрированная система 40 управления скоростью содержит систему 58 управления эффективной мощностью двигателя, систему 60 управления коробкой передач и систему 62 управления торможением, необходимо понимать, что в альтернативных вариантах осуществления может содержаться одна или две этих системы в любой подходящей комбинации. В дополнительных вариантах осуществления может содержаться система 40 управления скоростью, имеющая другие и/или дополнительные системы для облегчения регулирования скорости внедорожного транспортного средства.
В проиллюстрированном варианте осуществления система 42 управления тяговым усилием содержит систему 64 управления полным приводом и систему 66 управления блокировкой дифференциала. Система 64 управления полным приводом выполнена с возможностью выборочного включения и выключения системы полного привода внедорожного транспортного средства. Например, в некоторых вариантах осуществления внедорожное транспортное средство может содержать систему полного привода, выполненную с возможностью направления эффективной мощности двигателя на задние колеса/гусеницы во время выключения и с возможностью направления эффективной мощности двигателя на передние колеса/гусеницы и задние колеса/гусеницы во время включения. В таких вариантах осуществления система 64 управления полным приводом может выборочно подавать команду включения и выключения системы полного привода для управления тяговым усилием внедорожного транспортного средства. В некоторых вариантах осуществления внедорожное транспортное средство может содержать промежуточные колеса/гусеницы, расположенные между передними колесами/гусеницами и задними колесами/гусеницами. В таких вариантах осуществления система полного привода управления также может управлять передачей мощности двигателя на промежуточные колеса.
Кроме того, система 66 управления блокировкой дифференциала выполнена с возможностью выборочного включения системы блокировки дифференциала по меньшей мере одного дифференциала с блокировкой между соответствующей парой колес/гусениц. Например, в некоторых вариантах осуществления дифференциал с блокировкой расположен между задними колесами/гусеницами и выполнен с возможностью передачи мощности двигателя на задние колеса/гусеницы. В то время как система блокировки дифференциала выключена, дифференциал разблокирован. В результате скорость вращения одного заднего колеса/гусеницы может изменяться относительно скорости вращения другого заднего колеса/гусеницы. Однако, при включении системы блокировки дифференциала дифференциал заблокирован. В результате скорости вращения задних колес/гусениц могут быть по существу равны друг другу. В некоторых вариантах осуществления дифференциал с блокировкой можно расположить между передними колесами/гусеницами и/или между промежуточными колесами/гусеницами. В некоторых вариантах осуществления система 66 управления блокировкой дифференциала выполнена с возможностью независимого включения и выключения системы блокировки дифференциала каждого дифференциала с блокировкой. Несмотря на то, что проиллюстрированная система 42 управления тяговым усилием содержит систему 64 управления полным приводом и систему 66 управления блокировкой дифференциала, необходимо понимать, что в альтернативных вариантах осуществления может содержаться только одна из этих систем. В дополнительных вариантах осуществления может содержаться система 42 управления тяговым усилием, имеющая другие и/или дополнительные системы для облегчения управления тяговым усилием внедорожного транспортного средства 10.
Система 44 управления орудием выполнена с возможностью управления различными параметрами сельскохозяйственного орудия, буксируемого внедорожным транспортным средством. Например, в некоторых вариантах осуществления систему 44 управления орудием можно выполнить с возможностью подачи контроллеру орудия команды (например, посредством канала связи, такого как CAN-шина или ISOBUS) регулировки глубины проникновения по меньшей мере одного инструмента для земляных работ сельскохозяйственного орудия. В качестве примера, система 44 управления орудием может подавать контроллеру орудия команду уменьшения глубины проникновения в каждом месте обработки почвы на почвообрабатывающем орудии, или система 44 управления орудием может подавать контроллеру орудия команду высвобождения каждого диска/ножа сошника посевного/посадочного орудия из почвы. Уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ сельскохозяйственного орудия может уменьшать тяговую нагрузку на внедорожное транспортное средство. Кроме того, система 44 управления орудием может подавать контроллеру орудия команду перевода сельскохозяйственного орудия между рабочим положением и транспортировочным положением для регулировки скорости прохождения продукта из сельскохозяйственного орудия, или для регулировки положения жатки сельскохозяйственного орудия (например, уборочной машины и т.д.) среди других работ.
В некоторых вариантах осуществления контроллер 46 внедорожного транспортного средства может прямо управлять глубиной проникновения по меньшей мере одного инструмента для земляных работ сельскохозяйственного орудия. Например, контроллер 46 внедорожного транспортного средства может подавать трехточечной сцепке команду (например, посредством контроллера трехточечной сцепки) поднятия и опускания сельскохозяйственного орудия или части сельскохозяйственного орудия относительно поверхности почвы, тем самым регулируя глубину проникновения по меньшей мере одного инструмента для земляных работ сельскохозяйственного орудия. Кроме того, контроллер 46 внедорожного транспортного средства может подавать системе гидравлического управления команду регулировки давления гидравлической жидкости в один или более исполнительных механизмов на сельскохозяйственном орудии, тем самым управляя глубиной проникновения соответствующего инструмента (инструментов) для земляных работ.
Как обсуждалось ранее, внедорожное транспортное средство 10 выполнено с возможностью обмена данными с базовой станцией 32 посредством приемопередатчиков 28 и 30. В проиллюстрированном варианте осуществления базовая станция содержит контроллер 68, соединенный с возможностью обмена данными с приемопередатчиком 30 базовой станции. Контроллер 68 выполнен с возможностью выдачи команд и/или данных на внедорожное транспортное средство 10. Например, как обсуждается подробно ниже, контроллер 68 можно выполнить с возможностью выдачи карты пробуксовывания (например, включая погодные данные, данные влажности почвы, топографические данные и т.д.) в контроллер 46 внедорожного транспортного средства, тем самым позволяя контроллеру внедорожного транспортного средства определять ожидаемое пробуксовывание внедорожного транспортного средства. Кроме того, контроллер 68 может выдавать команды пуска и остановки в контроллер внедорожного транспортного средства, и/или контроллер 68 может подавать внедорожному транспортному средству команду следовать по выбранному/запланированному пути через поле.
В некоторых вариантах осуществления контроллер 68 представляет собой электронный контроллер, имеющий электрическую цепь, выполненную с возможностью обработки данных из определенных компонентов базовой станции 32 (например, приемопередатчика 30). В проиллюстрированном варианте осуществления контроллер 68 содержит процессор, такой как проиллюстрированный микропроцессор 70, и устройство 72 памяти. Процессор 68 можно использовать для выполнения программного обеспечения, такого как программное обеспечение для подачи команд и/или данных в контроллер 46 внедорожного транспортного средства и так далее. Кроме того, процессор 48 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных микросхем (ASICS) или какую-то их комбинацию. Например, процессор 70 может содержать один или более процессоров с сокращенным набором команд (RISC). Устройство 72 памяти может содержать энергозависимую память, такую как оперативная память (RAM), и/или энергонезависимую память, такую как ROM. В устройстве 72 памяти можно хранить много информации, и его можно использовать для разных целей. Например, в устройстве 72 памяти можно хранить выполняемые процессором команды (например, встроенные программы или программное обеспечение) для выполнения процессором 70, такие как команды для подачи команд и/или данных в контроллер 46 внедорожного транспортного средства.
В проиллюстрированном варианте осуществления базовая станция 32 содержит пользовательский интерфейс 74, соединенный с возможностью обмена данными с контроллером 68. Пользовательский интерфейс 74 выполнен с возможностью предоставления оператору данных из внедорожного транспортного средства и/или сельскохозяйственного орудия (например, данных, связанных с работой внедорожного транспортного средства, данных, связанных с работой сельскохозяйственного орудия, и т.д.). Пользовательский интерфейс 74 также выполнен с возможностью позволять оператору управлять определенными функциями внедорожного транспортного средства (например, запуском и остановкой внедорожного транспортного средства, подачи внедорожному транспортному средству команды следовать выбранному/запланированному маршруту через поле и т.д.). В проиллюстрированном варианте осуществления пользовательский интерфейс содержит дисплей 76, выполненный с возможностью предоставления оператору информации, такой как положение внедорожного транспортного средства 10 в пределах поля, скорость внедорожного транспортного средства и путь внедорожного транспортного средства, среди других данных. Кроме того, пользовательский интерфейс 74 (например, посредством дисплея 76, посредством аудио системы и т.д.) выполнен с возможностью предупреждения оператора, если пробуксовывание обнаружено и/или ожидается. Например, в некоторых вариантах осуществления пользовательский интерфейс 74 может предупреждать оператора, если внедорожное транспортное средство испытывает среднюю степень пробуксовывания (например, если величина пробуксовывания находится в пределах порогового диапазона).
В проиллюстрированном варианте осуществления базовая станция 32 содержит устройство 78 хранения данных, соединенное с возможностью обмена данными с контроллером 68. Устройство 78 хранения данных (например, энергонезависимое запоминающее устройство) может содержать постоянную память (ROM), флэш-память, накопитель на жестких дисках или любой другой подходящий оптический, магнитный или твердотельный носитель данных или их комбинацию. В устройстве (устройствах) хранения данных можно хранить данные (например, величину ожидаемого пробуксовывания, карты почвы и т.д.), команды (например, программное обеспечение или встроенные программы для подачи команд внедорожному транспортному средству и т.д.) и любые другие подходящие данные.
В то время как в проиллюстрированном варианте осуществления система 26 управления системы 24 управления пробуксовыванием содержит контроллер 46 внедорожного транспортного средства, необходимо понимать, что в альтернативных вариантах осуществления система 26 управления может содержать контроллер 68 базовой станции. Например, в некоторых вариантах осуществления функции управления системы 26 управления можно распределить между контроллером 46 внедорожного транспортного средства и контроллером 68 базовой станции. В дополнительных вариантах осуществления контроллер 68 базовой станции может выполнять существенную часть функций управления системы 26 управления. Например, в некоторых вариантах осуществления приемопередатчик 28 может выдавать на приемопередатчик 30 сигналы, указывающие величину пробуксовывания и/или темп изменения пробуксовывания. В таких вариантах осуществления приемопередатчик 30 может выдавать соответствующие сигналы в контроллер 68 базовой станции, а контроллер 68 базовой станции может определять необходимое действие в зависимости от величины пробуксовывания и/или темпа изменения пробуксовывания и выдавать сигнал, указывающий необходимое действие. Например, контроллер 68 может выдавать сигнал на пользовательский интерфейс, подавая на пользовательский интерфейс команду предупреждения оператора о пробуксовывании (например, если обнаружена средняя или высокая степень пробуксовывания). Кроме того, контроллер 68 может выдавать команды в контроллер 46 внедорожного транспортного средства (например, посредством приемопередатчиков 28 и 30), подавая внедорожному транспортному средству и/или сельскохозяйственному орудию команды выполнения определенных работ (например, команды уменьшения глубины проникновения по меньшей мере одного инструмента для земляных работ сельскохозяйственного орудия, команды остановки внедорожного транспортного средства и т.д.).
На фиг. 3 представлена блок-схема варианта осуществления системы 26 управления, которую можно использовать в системе управления пробуксовыванием по фиг. 2. В проиллюстрированном варианте осуществления система 26 управления содержит контроллер 46 внедорожного транспортного средства. Однако, как обсуждалось ранее, система управления может содержать контроллер базовой станции (например, отдельно или в комбинации с контроллером внедорожного транспортного средства). Как показано, контроллер 46 принимает сигнал 80, указывающий величину пробуксовывания. В некоторых вариантах осуществления сигнал 80 принимают из блока датчиков, который выполнен с возможностью определения скорости вращения каждого колеса/гусеницы внедорожного транспортного средства. В таких вариантах осуществления контроллер 46 определяет скорость поверхности сцепления с землей каждого колеса или гусеницы в зависимости от соответствующей скорости вращения и диаметра соответствующей шины или, например, длины соответствующей гусеницы. Затем контроллер 46 определяет величину пробуксовывания для каждого колеса или гусеницы путем определения разницы в процентах между скоростью соответствующей поверхности сцепления с землей и скоростью относительно земли 82 внедорожного транспортного средства (например, предоставляемой устройством локализации в пространстве, радиолокационным датчиком скорости и т.д.). В некоторых вариантах осуществления контроллер 46 может устанавливать величину пробуксовывания внедорожного транспортного средства на максимальную величину пробуксовывания колес и/или гусениц.
В проиллюстрированном варианте осуществления контроллер 46 также принимает сигнал 84, указывающий темп изменения пробуксовывания. В некоторых вариантах осуществления сигнал 84 принимают из блока датчиков, который выполнен с возможностью определения скорости вращения каждого колеса/гусеницы внедорожного транспортного средства. В таких вариантах осуществления контроллер 46 определяет величину пробуксовывания внедорожного транспортного средства (например, как описано выше). Затем контроллер 46 определяет темп изменения пробуксовывания путем определения изменения величины пробуксовывания в качестве функции времени (например, в показателях пробуксовывания в процентах в минуту).
В проиллюстрированном варианте осуществления контроллер 46 принимает сигнал 86, указывающий одно или более пороговых значений пробуксовывания. Например, контроллер 46 может принимать сигнал 86, указывающий одно или более пороговых значений пробуксовывания от пользовательского интерфейса, такого как пользовательский интерфейс базовой станции. В качестве примера, одно или более пороговых значений пробуксовывания можно вручную вводить в пользовательский интерфейс базовой станции, а затем передавать в контроллер 46 внедорожного транспортного средства посредством приемопередатчиков. В дополнительных вариантах осуществления контроллер 46 может определять некоторые пороговые значения пробуксовывания в зависимости от определенных рабочих параметров (например, в дополнение к получению определенных пороговых значений пробуксовывания от пользовательского интерфейса, или в качестве альтернативы получению пороговых значений пробуксовывания от пользовательского интерфейса). В таких вариантах осуществления контроллер 46 принимает сигнал 88, указывающий тип почвы (например, состав почвы, плотность почвы и т.д.), сигнал 90, указывающий содержание влаги в почве, сигнал 92, указывающий уклон почвы, сигнал 94, указывающий текущую массу внедорожного транспортного средства, сигнал 96, указывающий тяговую нагрузку на внедорожное транспортное средство, сигнал 98, указывающий количество растительных остатков на поверхности почвы, сигнал 100, указывающий тип растительных остатков на поверхности почвы или их комбинацию.
Сигналы, связанные с определенными рабочими параметрами, можно получать от контроллера базовой станции (например, посредством приемопередатчика базовой станции и приемопередатчика внедорожного транспортного средства). Например, устройство хранения данных базовой станции может содержать данные, связанные с типом почвы, содержанием влаги в почве, уклоном почвы, количеством растительных остатков на поверхности почвы и типом растительных остатков на поверхности почвы (например, в виде одной или более карт). Контроллер базовой станции может подавать приемопередатчику базовой станции команду выдачи данных о почве и растительных остатках в контроллер 46 внедорожного транспортного средства посредством приемопередатчика внедорожного транспортного средства. Соответственно, контроллер 46 внедорожного транспортного средства может принимать сигнал 88, указывающий тип почвы, сигнал 90, указывающий содержание влаги в почве, сигнал 92, указывающий уклон почвы, сигнал 98, указывающий количество растительных остатков на поверхности почвы, сигнал 100, указывающий тип растительных остатков на поверхности почвы или их комбинацию, от контроллера базовой станции.
В некоторых вариантах осуществления внедорожное транспортное средство содержит датчики (например, тензодатчики, датчики деформаций и т.д.), выполненные с возможностью выдачи сигнала 94, указывающего текущую массу внедорожного транспортного средства. Например, датчик можно разместить на каждом колесе или гусенице и выполнить с возможностью выдачи сигнала, указывающего нагрузку, прикладываемую внедорожным транспортным средством к соответствующему колесу или гусенице. Контроллер 46 может суммировать отдельные нагрузки друг с другом для определения текущей массы внедорожного транспортного средства. Кроме того, внедорожное транспортное средство может содержать датчик (например, тензодатчик, датчик деформаций и т.д.), соединенный с узлом сцепки внедорожного транспортного средства и выполненный с возможностью выдачи сигнала 96, указывающего тяговую нагрузку на внедорожное транспортное средство. После получения сигналов контроллер 46 внедорожного транспортного средства может затем определить одно или более пороговых значений по меньшей мере частично на основании типа почвы, содержания влаги в почве, уклона почвы, текущей массы внедорожного транспортного средства, тяговой нагрузки на внедорожное транспортное средство, количества растительных остатков на поверхности почвы, типа растительных остатков на поверхности почвы или их комбинации.
В некоторых вариантах осуществления контроллер 46 выдает сигнал, указывающий первое действие, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, при этом второе пороговое значение больше, чем первое пороговое значение. В некоторых вариантах осуществления первое и второе пороговые значения устанавливают диапазон пробуксовывания, который соответствует средней степени пробуксовывания. Дополнительно или альтернативно, контроллер 46 выдает сигнал, указывающий первое действие, если темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, причем четвертое пороговое значение больше, чем третье пороговое значение. Однако, в вариантах осуществления, в которых величину пробуксовывания и темп изменения пробуксовывания сравнивают с соответствующими пороговыми значениями, контроллер 46 не выдает сигнал, указывающий первое действие, если величина пробуксовывания больше, чем второе пороговое значение, или темп изменения пробуксовывания больше, чем четвертое пороговое значение.
В некоторых вариантах осуществления первое действие включает оповещение оператора, что величина пробуксовывания больше, чем первое пороговое значение, и/или что темп изменения пробуксовывания больше, чем третье пороговое значение. В таких вариантах осуществления контроллер 46 выдает сигнал 102 (например, на пользовательский интерфейс базовой станции), указывающий команды предупреждения оператора. Дополнительно или альтернативно, первое действие включает в себя включение системы полного привода и/или включение системы блокировки дифференциала. Соответственно, контроллер 46 выдает сигнал 104 (например, в систему управления полным приводом и/или в систему управления блокировкой дифференциала), указывающий команды включения системы полного привода и/или системы блокировки дифференциала. Как обсуждалось ранее, включение системы полного привода и/или системы блокировки дифференциала может увеличивать тяговое усилие внедорожного транспортного средства, тем самым уменьшая пробуксовывание и/или вероятность увязания внедорожного транспортного средства в почве.
В некоторых вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение первого действия, если величина пробуксовывания уменьшается/находится ниже первого порогового значения или увеличивается выше второго порогового значения, и/или темп изменения пробуксовывания уменьшается/находится ниже третьего порогового значения или увеличивается выше четвертого порогового значения. В дополнительных вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение первого действия, если величина пробуксовывания уменьшается/находится ниже первого порогового значения в течение пороговой продолжительности времени, а темп изменения пробуксовывания уменьшается/находится ниже третьего порогового значения в течение пороговой продолжительности времени. Например, контроллер 46 может выдавать сигнал (например, на пользовательский интерфейс базовой станции), указывающий команды отмены предупреждения оператора, и/или команды предоставления указания, что величина пробуксовывания и/или темп изменения пробуксовывания ниже соответствующих пороговых значений (например, что степень пробуксовывания низкая). Кроме того, контроллер может выдавать сигнал (например, в систему управления полным приводом и/или в систему управления блокировкой дифференциала), указывающий команды выключения системы полного привода и/или системы блокировки дифференциала. Соответственно, в некоторых вариантах осуществления контроллер может подавать команду первого действия в то время как (например, только в то время как, по существу только в то время как и т.д.) величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и/или темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, а в вариантах осуществления, в которых величину пробуксовывания и темп изменения пробуксовывания сравнивают с пороговыми значениями, величина пробуксовывания не больше, чем второе пороговое значение, а темп изменения пробуксовывания не больше, чем четвертое пороговое значение.
Кроме того, контроллер 46 выдает сигнал, указывающий второе действие, отличающееся от первого действия, если величина пробуксовывания больше, чем второе пороговое значение. Дополнительно или альтернативно, контроллер 46 выдает сигнал, указывающий второе действие, если темп изменения пробуксовывания больше, чем четвертое пороговое значение. В некоторых вариантах осуществления второе действие включает уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ. В таких вариантах осуществления контроллер 46 выдает сигнал 106 (например, в систему управления орудия), указывающий команды уменьшения глубины проникновения одного или более инструментов для земляных работ сельскохозяйственного орудия. В качестве примера, сигнал 106 может содержать команды уменьшения глубины проникновения в каждом месте обработки почвы на почвообрабатывающем орудии или отцепления каждого диска/ножа сошника посевного/посадочного орудия от почвы. Уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ сельскохозяйственного орудия может уменьшать тяговую нагрузку на внедорожное транспортное средство, тем самым уменьшая пробуксовывание внедорожного транспортного средства относительно поверхности почвы.
В некоторых вариантах осуществления можно отдельно регулировать глубину проникновения инструмента (инструментов) для земляных работ для установки требуемой величины пробуксовывания. Например, контроллер 46 может выдавать сигнал (например, сигнал 106), указывающий команды регулировки глубины проникновения инструмента (инструментов) для земляных работ, для установки величины пробуксовывания, которая находится в пределах требуемого диапазона. Если величина пробуксовывания увеличивается выше требуемого диапазона, контроллер 46 может выдавать сигнал, указывающий команды уменьшения глубины проникновения инструмента (инструментов) для земляных работ, а если величина пробуксовывания уменьшается ниже требуемого диапазона, контроллер 46 может выдавать сигнал, указывающий команды увеличения глубины проникновения инструмента (инструментов) для земляных работ. Таким образом, можно по существу поддерживать требуемую величину пробуксовывания.
В некоторых вариантах осуществления второе действие включает остановку внедорожного транспортного средства. В таких вариантах осуществления контроллер 46 выдает сигнал 108 (например, в систему управления скоростью), указывающий команды остановки внедорожного транспортного средства. Остановка внедорожного транспортного средства в то время как внедорожное транспортное средство испытывает высокую степень пробуксовывания (например, величина пробуксовывания больше, чем второе пороговое значение) может существенно уменьшить вероятность увязания внедорожного транспортного средства в почве.
В некоторых вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение второго действия, если величина пробуксовывания уменьшается/находится ниже второго порогового значения, и/или темп изменения пробуксовывания уменьшается/находится ниже четвертого порогового значения. В дополнительных вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение второго действия, если величина пробуксовывания уменьшается/находится ниже второго порогового значения в течение пороговой продолжительности времени, и/или темп изменения пробуксовывания уменьшается/находится ниже четвертого порогового значения в течение пороговой продолжительности времени. Например, контроллер 46 может выдавать сигнал (например, в систему управления орудия), указывающий команды увеличения глубины проникновения одного или более инструментов для земляных работ орудия (например, до глубины проникновения перед пробуксовыванием). Соответственно, в некоторых вариантах осуществления контроллер может подавать команду второго действия в то время как (например, только в то время как, по существу только в то время как и т.д.) величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение.
В некоторых вариантах осуществления контроллер 46 принимает сигнал 110, указывающий одну или более пороговых продолжительностей пробуксовывания. Например, контроллер 46 может принимать сигнал 110, указывающий одну или более пороговых продолжительностей пробуксовывания, от пользовательского интерфейса, такого как пользовательский интерфейс базовой станции. В качестве примера, одну или более пороговых продолжительностей пробуксовывания можно вручную вводить в пользовательский интерфейс базовой станции, а затем передавать в контроллер 46 внедорожного транспортного средства посредством приемопередатчиков. В некоторых вариантах осуществления контроллер 46 принимает сигнал 80, указывающий величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Контроллер 46 также может принимать сигнал 86, указывающий одно или более пороговых значений пробуксовывания, и/или определять некоторые пороговые значения по меньшей мере частично на основании типа почвы, содержания влаги в почве, уклона почвы, текущей массы внедорожного транспортного средства, тяговой нагрузки на внедорожное транспортное средство, количества растительных остатков на поверхности почвы, типа растительных остатков на поверхности почвы или их комбинации.
Если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем первая пороговая продолжительность времени, контроллер 46 выдает сигнал, указывающий первое действие. Как обсуждалось ранее, первое действие может включать оповещение оператора о пробуксовывании посредством сигнала 102, и/или включение системы полного привода и/или системы блокировки дифференциала посредством сигнала 104. В некоторых вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение первого действия (например, отмену предупреждения, отключение системы полного привода и/или системы блокировки дифференциала и т.д.), если величина пробуксовывания уменьшается ниже первого порогового значения. В дополнительных вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение первого действия, если величина пробуксовывания уменьшается ниже первого порогового значения в течение пороговой продолжительности времени. Соответственно, в некоторых вариантах осуществления контроллер может подавать команду первого действия в то время как (например, только в то время как, по существу только в то время как и т.д.) величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем первая пороговая продолжительность времени.
Кроме того, контроллер 46 выдает сигнал, указывающий второе действие, если величина пробуксовывания больше, чем второе пороговое значение. Как обсуждалось ранее, второе действие может включать уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ посредством сигнала 106 и/или остановку внедорожного транспортного средства посредством сигнала 108. В некоторых вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение второго действия (например, увеличение глубины проникновения по меньшей мере одного инструмента для земляных работ и т.д.), если величина пробуксовывания уменьшается ниже второго порогового значения, или если величина пробуксовывания уменьшается ниже второго порогового значения в течение пороговой продолжительности времени. Соответственно, в некоторых вариантах осуществления контроллер может подавать команду второго действия в то время как (например, только в то время как, по существу только в то время как и т.д.) величина пробуксовывания больше, чем второе пороговое значение.
В некоторых вариантах осуществления контроллер 46 выполнен с возможностью приема сигнала 84, указывающего темп изменения пробуксовывания. В таких вариантах осуществления контроллер 46 выдает сигнал, указывающий первое действие, если темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, и нет, если величина пробуксовывания больше, чем второе пороговое значение. Дополнительно или альтернативно, контроллер 46 выдает сигнал, указывающий второе действие, если темп изменения пробуксовывания больше, чем четвертое пороговое значение. Кроме того, контроллер 46 не выдает сигнал, указывающий первое действие, если темп изменения пробуксовывания больше, чем четвертое пороговое значение. В дополнительных вариантах осуществления контроллер 46 выполнен с возможностью выдачи сигнала, указывающего второе действие, и не выдачи сигнала, указывающего первое действие, если величина пробуксовывания больше, чем пятое пороговое значение в течение более, чем вторая пороговая продолжительность времени, причем пятое пороговое значение больше или равно первому пороговому значению и меньше, чем второе пороговое значение.
В некоторых вариантах осуществления контроллер 46 принимает сигнал 112, указывающий ожидаемую величину пробуксовывания. Например, ожидаемую величину пробуксовывания для каждого положения в пределах поля можно хранить в устройстве хранения данных базовой станции. Контроллер базовой станции, который соединен с возможностью обмена данными с устройством хранения данных, может выдавать ожидаемую величину в контроллер 46 внедорожного транспортного средства (например, посредством приемопередатчиков). В качестве примера, контроллер 46 внедорожного транспортного средства может принимать сигнал 114, указывающий положение внедорожного транспортного средства в пределах поля (например, от устройства локализации в пространстве). Затем контроллер 46 внедорожного транспортного средства может выдавать положение внедорожного транспортного средства в контроллер базовой станции посредством приемопередатчиков. Контроллер базовой станции может определять ожидаемую величину пробуксовывания в положении внедорожного транспортного средства (например, используя данные, хранящиеся в устройстве хранения данных). Затем контроллер базовой станции может выдавать ожидаемую величину пробуксовывания в контроллер 46 внедорожного транспортного средства посредством приемопередатчиков.
В дополнительных вариантах осуществления контроллер 46 определяет ожидаемую величину пробуксовывания по меньшей мере частично на основании карты пробуксовывания. В таких вариантах осуществления контроллер 46 принимает сигнал 116, отражающий карту пробуксовывания (например, от контроллера базовой станции посредством приемопередатчиков), и/или осуществляет доступ к карте пробуксовывания, хранящейся в памяти контроллера внедорожного транспортного средства. Карта пробуксовывания может содержать погодные данные (например, данные количества осадков, данные температуры воздуха, данные влажности воздуха, данные скорости ветра, данные интенсивности солнечного излучения и т.д.), данные влажности почвы, топографические данные или их комбинацию, среди других данных, связанных с пробуксовыванием. Кроме того, карта пробуксовывания может содержать данные пробуксовывания одного или более предыдущих проходов через поле и/или вдоль одного или более пройденных ранее рядов. Карта пробуксовывания содержит данные, имеющие значения, которые изменяются в зависимости от положения в пределах поля. Соответственно, когда внедорожное транспортное средство двигается по выбранному/запланированному маршруту, контроллер 46 получает доступ к данным, связанным с текущим положением (например, в зависимости от сигнала 114, указывающего положение внедорожного транспортного средства в пределах поля). Затем контроллер определяет ожидаемую величину пробуксовывания в текущем положении и/или в пределах находящегося впереди участка (например, области в пределах выбранного/запланированного маршрута внедорожного транспортного средства).
В некоторых вариантах осуществления контроллер 46 принимает сигнал 80, указывающий величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы (например, определенную величину пробуксовывания). Контроллер 46 также может принимать сигнал 86, указывающий одно или более пороговых значений пробуксовывания, и/или определять некоторые пороговые значения по меньшей мере частично на основании типа почвы, содержания влаги в почве, уклона почвы, текущей массы внедорожного транспортного средства, тяговой нагрузки на внедорожное транспортное средство, количества растительных остатков на поверхности почвы, типа растительных остатков на поверхности почвы или их комбинации. Если определенная величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, контроллер 46 выдает сигнал, указывающий первое действие. Дополнительно или альтернативно, если ожидаемая величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, контроллер 46 выдает сигнал, указывающий первое действие. Однако, в вариантах осуществления, в которых определенную величину пробуксовывания и ожидаемую величину пробуксовывания сравнивают с пороговыми значениями, контроллер 46 не выдает сигнал, указывающий первое действие, если определенная величина пробуксовывания или ожидаемая величина пробуксовывания больше, чем второе пороговое значение. Как обсуждалось ранее, первое действие может включать оповещение оператора о пробуксовывании посредством сигнала 102, и/или включение системы полного привода и/или системы блокировки дифференциала посредством сигнала 104.
В некоторых вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение первого действия (например, отмену предупреждения, отключение системы полного привода и/или системы блокировки дифференциала и т.д.), если определенная величина пробуксовывания уменьшается ниже первого порогового значения или увеличивается выше второго порогового значения, и/или ожидаемая величина пробуксовывания уменьшается ниже первого порогового значения или увеличивается выше второго порогового значения. В дополнительных вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение первого действия, если определенная величина пробуксовывания уменьшается ниже первого порогового значения в течение пороговой продолжительности времени, и/или ожидаемая величина пробуксовывания уменьшается ниже первого порогового значения в течение пороговой продолжительности времени. Соответственно, в некоторых вариантах осуществления контроллер может подавать команду первого действия в то время как (например, только в то время как, по существу только в то время как и т.д.) определенная величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и/или ожидаемая величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, а в вариантах осуществления, в которых определенную величину пробуксовывания и ожидаемую величину пробуксовывания сравнивают с пороговыми значениями, определенная величина пробуксовывания и ожидаемая величина пробуксовывания не больше, чем второе пороговое значение.
Кроме того, контроллер 46 выдает сигнал, указывающий второе действие, если определенная величина пробуксовывания больше, чем второе пороговое значение. Дополнительно или альтернативно, контроллер 46 выдает сигнал, указывающий второе действие, если ожидаемая величина пробуксовывания больше, чем второе пороговое значение. Как обсуждалось ранее, второе действие может включать уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ посредством сигнала 106 и/или остановку внедорожного транспортного средства посредством сигнала 108. В некоторых вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение второго действия (например, увеличение глубины проникновения по меньшей мере одного инструмента для земляных работ и т.д.), если определенная величина пробуксовывания уменьшается ниже второго порогового значения, и/или ожидаемая величина пробуксовывания уменьшается ниже второго порогового значения. В дополнительных вариантах осуществления контроллер 46 может выдавать сигнал, указывающий завершение второго действия, если определенная величина пробуксовывания уменьшается ниже второго порогового значения в течение пороговой продолжительности времени, и/или ожидаемая величина пробуксовывания уменьшается ниже второго порогового значения в течение пороговой продолжительности времени. Соответственно, в некоторых вариантах осуществления контроллер может подавать команду второго действия в то время как (например, только в то время как, по существу только в то время как и т.д.) определенная величина пробуксовывания больше, чем второе пороговое значение, и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение.
В некоторых вариантах осуществления контроллер 46 обновляет карту пробуксовывания (например, путем выдачи сигнала 118, указывающего обновление, и/или путем обновления карты пробуксовывания в памяти контроллера внедорожного транспортного средства) по меньшей мере частично на основании определенной величины пробуксовывания (например, величины пробуксовывания, определенной контроллером 46 на основании входных данных из блока датчиков). В качестве примера, каждую точку карты пробуксовывания (например, соответствующую положению в пределах поля) можно обновлять, если разница между определенным пробуксовыванием и ожидаемым пробуксовыванием в этой точке больше, чем пороговое значение. В результате можно повысить точность карты пробуксовывания, тем самым повышая эффективность последующих сельскохозяйственных работ. В некоторых вариантах осуществления контроллер 46 выдает сигнал 120, указывающий команды для направления вокруг находящегося впереди участка (например, участка в пределах выбранного/запланированного маршрута внедорожного транспортного средства), если ожидаемая величина пробуксовывания в пределах находящегося впереди участка больше, чем второе пороговое значение. Направление вокруг участка, в котором внедорожное транспортное средство может испытывать высокую степень пробуксовывания, может существенно уменьшить вероятность увязания внедорожного транспортного средства в почве, тем самым повышая эффективность сельскохозяйственных работ.
В некоторых вариантах осуществления контроллер 46 может выдавать сигнал, указывающий команды возврата на обойденный участок (например, участок, имеющий высокую степень ожидаемого пробуксовывания) после завершения оставшейся части выбранного/запланированного маршрута. После того, как внедорожное транспортное средство достигает обойденного участка, контроллер 46 может выдавать сигнал, указывающий команды предупреждения оператора (например, посредством пользовательского интерфейса базовой станции), что ожидается высокая степень пробуксовывания. В то время как внедорожное транспортное средство проходит участок, оператор может отслеживать и/или управлять работой внедорожного транспортного средства (например, в дополнение к системе управления) для уменьшения вероятности увязания внедорожного транспортного средства в почве. За счет выполнения сельскохозяйственных работ (например, почвообрабатывающих, посевных, уборочных и т.д.) на участке с ожидаемым большим пробуксовыванием можно повысить общую продуктивность поля.
На фиг. 4 представлена блок-схема варианта осуществления способа 122 управления пробуксовыванием внедорожного транспортного средства. Сперва, как представлено в блоке 124, от пользовательского интерфейса (например, пользовательского интерфейса базовой станции) принимают сигнал, указывающий первое пороговое значение, второе пороговое значение, третье пороговое значение, четвертое пороговое значение или их комбинацию. Дополнительно или альтернативно, как представлено в блоке 126, принимают сигнал, указывающий рабочий параметр (параметры). Как обсуждалось ранее, среди других параметров рабочие параметры могут включать тип почвы, содержание влаги в почве, уклон почвы, текущую массу внедорожного транспортного средства, тяговую нагрузку на внедорожное транспортное средство, количество растительных остатков на поверхности почвы и тип растительных остатков на поверхности почвы. Затем, как представлено в блоке 128, на основании рабочего параметра (параметров) определяют первое пороговое значение, второе пороговое значение, третье пороговое значение, четвертое пороговое значение или их комбинацию.
Далее, как представлено в блоке 130, принимают (например, из блока датчиков) сигнал, указывающий величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Дополнительно или альтернативно, как представлено в блоке 132, принимают (например, из блока датчиков) сигнал, указывающий темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Как представлено в блоке 133, если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение, способ 122 переходит в блок 140. В противном случае, способ 122 переходит в блок 134. Если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, как представлено в блоке 134, выдается сигнал, указывающий первое действие, как представлено в блоке 136. Кроме того, если темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, как представлено в блоке 138, выдается сигнал, указывающий первое действие, как представлено в блоке 136. Как обсуждалось ранее, первое действие может включать оповещение оператора, что величина пробуксовывания больше, чем первое пороговое значение, и/или что темп изменения пробуксовывания больше, чем третье пороговое значение. Дополнительно или альтернативно, первое действие может включать в себя включение системы полного привода и/или включение системы блокировки дифференциала.
Кроме того, если величина пробуксовывания больше, чем второе пороговое значение, как представлено в блоке 140, выдается сигнал, указывающий второе действие, отличающееся от первого действия, как представлено в блоке 142. Кроме того, если темп изменения пробуксовывания больше, чем четвертое пороговое значение, как представлено в блоке 144, выдается сигнал, указывающий второе действие, как представлено в блоке 142. Как обсуждалось ранее, второе действие может включать уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ (например, инструмента для земляных работ сельскохозяйственного орудия). Дополнительно или альтернативно, второе действие может включать остановку внедорожного транспортного средства (например, посредством системы управления скоростью).
Если величина пробуксовывания меньше, чем ноль (т.е., величина пробуксовывания отрицательная), как представлено в блоке 145, выдается сигнал, указывающий третье действие, как представлено в блоке 146. Как обсуждалось ранее, отрицательная величина пробуксовывания может быть показателем скольжения внедорожного транспортного средства относительно поверхности почвы. В некоторых вариантах осуществления третье действие может включать увеличение скорости вращения одного или более колес и/или гусениц (например, посредством системы управления эффективной мощностью двигателя и/или системы управления коробкой передач) для удаления почвы из углублений между протекторами, регулирование (например, увеличения или уменьшения) силы торможения, прикладываемой к одному или более колесам и/или гусеницам (например, посредством системы управления торможением), отключение коробки передач (например, посредством системы управления коробкой передач) или их комбинацию. В дополнительных вариантах осуществления, если внедорожное транспортное средство находится на уклоне, третье действие может включать поворот внедорожного транспортного средства в направлении под уклон (например, таким образом, чтобы колеса и/или гусеницы были выровнены с уклоном). В некоторых вариантах осуществления также можно выдавать сигнал, указывающий завершение первого действия и/или составного действия, если величина пробуксовывания меньше, чем ноль. В дополнительных вариантах осуществления можно выдавать сигнал, указывающий завершение третьего действия, если темп изменения пробуксовывания больше, чем четвертое пороговое значение.
В некоторых вариантах осуществления, если величина пробуксовывания больше, чем шестое пороговое значение, как представлено в блоке 147, выдается сигнал, указывающий остановку внедорожного транспортного средства, как представлено в блоке 148. В качестве примера, шестое пороговое значение может составлять пробуксовывание приблизительно 90 процентов (например, показатель очень высокой степени пробуксовывания). Остановка внедорожного транспортного средства, в то время как внедорожное транспортное средство испытывает очень высокую степень пробуксовывания, может существенно уменьшить или устранить вероятность увязания внедорожного транспортного средства в почве. В некоторых вариантах осуществления также можно выдавать сигнал, указывающий завершение первого действия и/или составного действия, если величина пробуксовывания больше, чем шестое пороговое значение.
На фиг. 5 представлена блок-схема еще одного варианта осуществления способа 150 управления пробуксовыванием внедорожного транспортного средства. Сперва, как представлено в блоке 152, принимают (например, из блока датчиков) сигнал, указывающий величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Дополнительно или альтернативно, принимают сигнал, указывающий темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы, как представлено в блоке 154. Как представлено в блоке 155, если величина пробуксовывания больше, чем второе пороговое значение, и/или темп изменения пробуксовывания больше, чем четвертое пороговое значение, способ переходит в блок 162. В противном случае, способ 150 переходит в блок 156. Если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем первая пороговая продолжительность времени, как представлено в блоке 156, выдается сигнал, указывающий первое действие, как представлено в блоке 158. Кроме того, если темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, как представлено в блоке 160, выдается сигнал, указывающий первое действие, как представлено в блоке 158. Как обсуждалось ранее, первое действие может включать оповещение оператора, что величина пробуксовывания больше, чем первое пороговое значение, и/или что темп изменения пробуксовывания больше, чем третье пороговое значение. Дополнительно или альтернативно, первое действие может включать в себя включение системы полного привода и/или включение системы блокировки дифференциала.
Кроме того, если величина пробуксовывания больше, чем второе пороговое значение, как представлено в блоке 162, выдается сигнал, указывающий второе действие, отличающееся от первого действия, как представлено в блоке 164. Кроме того, если темп изменения пробуксовывания больше, чем четвертое пороговое значение, как представлено в блоке 166, выдается сигнал, указывающий второе действие, как представлено в блоке 164. Как обсуждалось ранее, второе действие может включать уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ (например, инструмента для земляных работ сельскохозяйственного орудия). Дополнительно или альтернативно, второе действие может включать остановку внедорожного транспортного средства (например, посредством системы управления скоростью).
Кроме того, если величина пробуксовывания больше, чем пятое пороговое значение в течение более, чем вторая пороговая продолжительность времени, как представлено в блоке 168, выдается сигнал, указывающий второе действие, как представлено в блоке 164. Кроме того, если величина пробуксовывания больше, чем пятое пороговое значение в течение более, чем вторая пороговая продолжительность времени, не выдается сигнал, указывающий первое действие, и/или выдается сигнал, указывающий завершение первого действия. В некоторых вариантах осуществления пятое пороговое значение больше или равно первому пороговому значению и меньше, чем второе пороговое значение.
На фиг. 6 представлена блок-схема дополнительного варианта осуществления способа 170 управления пробуксовыванием внедорожного транспортного средства. Сперва, как представлено в блоке 172, принимают сигнал, указывающий ожидаемую величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Дополнительно или альтернативно, ожидаемую величину пробуксовывания определяют по меньшей мере частично на основании карты пробуксовывания, как представлено в блоке 174. Как обсуждалось ранее, карта пробуксовывания может содержать погодные данные (например, данные количества осадков, данные температуры воздуха, данные влажности воздуха, данные скорости ветра, данные интенсивности солнечного излучения и т.д.), данные влажности почвы, топографические данные или их комбинацию. Кроме того, карта пробуксовывания может содержать данные пробуксовывания одного или более предыдущих проходов через поле и/или из одного или более пройденных ранее рядов. Далее, как представлено в блоке 176, принимают (например, из блока датчиков) сигнал, указывающий определенную величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы.
Как представлено в блоке 177, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания не больше, чем второе пороговое значение, способ 170 переходит в блок 178. Если определенная величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, как представлено в блоке 178, выдается сигнал, указывающий первое действие, как представлено в блоке 180. Дополнительно или альтернативно, если ожидаемая величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, как представлено в блоке 182, выдается сигнал, указывающий первое действие, как представлено в блоке 180. Как обсуждалось ранее, первое действие может включать оповещение оператора, что определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем первое пороговое значение. Дополнительно или альтернативно, первое действие может включать в себя включение системы полного привода и/или включение системы блокировки дифференциала.
Кроме того, если определенная величина пробуксовывания и/или ожидаемая величина пробуксовывания больше, чем второе пороговое значение, способ 170 переходит в блок 184. Если определенная величина пробуксовывания больше, чем второе пороговое значение, как представлено в блоке 184, выдается сигнал, указывающий второе действие, отличающееся от первого действия, как представлено в блоке 186. Дополнительно или альтернативно, если ожидаемая величина пробуксовывания больше, чем второе пороговое значение, как представлено в блоке 188, выдается сигнал, указывающий второе действие, как представлено в блоке 186. Как обсуждалось ранее, второе действие может включать уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ (например, инструмента для земляных работ сельскохозяйственного орудия). Дополнительно или альтернативно, второе действие может включать остановку внедорожного транспортного средства (например, посредством системы управления скоростью).
Если ожидаемая величина пробуксовывания в пределах находящегося впереди участка больше, чем второе пороговое значение, как представлено в блоке 190, выдается сигнал, указывающий команды направления вокруг находящегося впереди участка (например, в систему рулевого управления), как представлено в блоке 192. Как обсуждалось ранее, направление вокруг участка, в котором внедорожное транспортное средство может испытывать высокую степень пробуксовывания, может существенно уменьшить вероятность увязания внедорожного транспортного средства в почве, тем самым повышая эффективность сельскохозяйственных работ. Кроме того, как представлено в блоке 194, карта пробуксовывания (например, после этапа, связанного с блоком 180, или после этапа, связанного с блоком 186) по меньшей мере частично обновляется на основании определенной величины пробуксовывания (например, величины пробуксовывания, определенной контроллером внедорожного транспортного средства на основании входных данных из блока датчиков). В качестве примера, каждую точку карты пробуксовывания (например, соответствующую положению в пределах поля) можно обновлять, если разница между определенным пробуксовыванием и ожидаемым пробуксовыванием в этой точке больше, чем пороговое значение. В результате можно повысить точность карты пробуксовывания, тем самым повышая эффективность последующих сельскохозяйственных работ.
В некоторых вариантах осуществления этапы одного способа можно интегрировать в другой способ (например, любым подходящим образом). Например, в способе 122, описанном выше со ссылкой на фиг. 4, принимают сигнал, указывающий пороговые значения, и/или пороговые значения определяют, как представлено в блоках 124, 126 и 128. Необходимо понимать, что один или более этапов, связанных с блоками 124, 126 и 128, можно интегрировать в способ 150, описанный выше со ссылкой на фиг. 5, и/или способ 170, описанный выше со ссылкой на фиг. 6. Кроме того, в способе 170, описанном выше со ссылкой на фиг. 6, ожидаемую величину сравнивают с первым и вторым пороговыми значениями для определения, выполнять ли первое действие и/или второе действие, как представлено в блоках 182 и 188. Необходимо понимать, что один или более этапов, связанных с блоками 182 и 188, можно интегрировать в способ 122, описанный выше со ссылкой на фиг. 4, и/или способ 150, описанный выше со ссылкой на фиг. 5.
Кроме того, в то время как каждый способ, описанный выше со ссылкой на фиг. 4-6, включает этапы выдачи сигнала, указывающего первое действие и выдачи сигнала, указывающего второе действие, необходимо понимать, что в некоторых вариантах осуществления в одном или более способов может быть пропущен один из этапов выдачи сигнала, указывающего одно действие. Например, в некоторых вариантах осуществления в способе 122, описанном выше со ссылкой на фиг. 4, могут быть пропущены этапы 134, 136 и 138 выдачи сигнала, указывающего первое действие, или в способе 122 могут быть пропущены этапы 140, 142 и 144 выдачи сигнала, указывающего второе действие. В дополнительных вариантах осуществления в способе 150, описанном выше со ссылкой на фиг. 5, могут быть пропущены этапы 156, 158 и 160 выдачи сигнала, указывающего первое действие, или в способе 150 могут быть пропущены этапы 162, 164, 166 и 168 выдачи сигнала, указывающего второе действие. Кроме того, в некоторых вариантах осуществления в способе 170, описанном выше со ссылкой на фиг. 6, могут быть пропущены этапы 178, 180 и 182 выдачи сигнала, указывающего первое действие, или в способе 170 могут быть пропущены этапы 184, 186 и 188 выдачи сигнала, указывающего второе действие.
В то время как операции, связанные со вторым действием, описанным выше, включают уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ и остановку внедорожного транспортного средства, необходимо понимать, что в некоторых вариантах осуществления систему управления можно выполнить с возможностью выдачи команды, указывающей другие операции. Например, система управления может выдавать сигнал (например, на пользовательский интерфейс базовой станции), указывающий команды предупреждения оператора, что величина пробуксовывания больше, чем второе пороговое значение, темп или пробуксовывание больше, чем четвертое пороговое значение, ожидаемая величина пробуксовывания больше, чем второе пороговое значение, или их комбинацию. Кроме того, внедорожное транспортное средство может попасть на участок, на котором ожидается средняя степень пробуксовывания. Однако, определенная величина пробуксовывания может быть значительно выше, чем ожидаемая величина пробуксовывания. Если около входа на участок обнаружена высокая степень пробуксовывания, система управления может подавать системе рулевого управления команду направления внедорожного транспортного средства в сторону ближайшей границы участка или по пути более низкого пробуксовывания в сторону границы участка (например, по пути через часть участка, имеющую более низкое ожидаемое пробуксовывание, чем ожидаемое пробуксовывание по выбранному/запланированному маршруту через участок). Соответственно, второе действие может включать направление за пределы участка. Однако, если высокая степень пробуксовывания обнаружена около выхода с участка (например, границы участка по выбранному/запланированному маршруту), система управления может подавать внедорожному транспортному средству команду продолжения выхода, не предпринимая действие. Например, во время уборочных работ любое уплотнение или колесные колеи, вызываемые продолжением выхода без предпринимаемого действия, можно уменьшить во время последующих почвообрабатывающих работ. Однако, во время посевных работ и/или, если не требуются операции «механической обработки почвы», система управления может выдавать команды, указывающие другие операции (например, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, остановку внедорожного транспортного средства и т.д.) для уменьшения вероятности уплотнения или образования колеи.
В некоторых вариантах осуществления операция (операции), связанные с первым действием, и/или операция (операции), связанные со вторым действием, можно выбирать на основании ввода пользователя. Например, перед тем, как внедорожное транспортное средство начинает путь через поле, оператор может связать одну или более операций с первым действием (например, из списка операций, включая оповещение оператора о пробуксовывании, включение системы полного привода, включение системы блокировки дифференциала и т.д.). Когда внедорожное транспортное средство испытывает условия, достаточные для запуска первого действия (например, величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению и т.д.), контроллер внедорожного транспортного средства выдает сигнал, указывающий первое действие, тем самым запуская выполнение выбранной операции (операций). Кроме того, перед тем, как внедорожное транспортное средство начинает путь через поле, оператор может связать одну или более операций со вторым действием (например, из списка операций, включая оповещение оператора о пробуксовывании, уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, остановку внедорожного транспортного средства и т.д.). Когда внедорожное транспортное средство испытывает условия, достаточные для запуска второго действия (например, величина пробуксовывания больше, чем второе пороговое значение, и т.д.), контроллер внедорожного транспортного средства выдает сигнал, указывающий второе действие, тем самым запуская выполнение выбранной операции (операций).
Кроме того, если множество операций связаны с первым действием и/или вторым действием, оператор может выбирать, выполнять ли операции последовательно (например, разделить с задержкой по времени) или одновременно. Например, первое действие может включать одновременное оповещение оператора о пробуксовывании и включение системы полного привода. Кроме того, первое действие может включать в себя включение системы полного привода, а затем оповещение оператора о пробуксовывании после пороговой продолжительности времени. В качестве примера, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, можно включить систему полного привода. Однако, если величина пробуксовывания остается больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем пороговая продолжительность времени после выключения системы полного привода, оператора можно предупредить, тем самым информируя оператора, что включение системы полного привода не уменьшило величину пробуксовывания ниже первого порогового значения.
Кроме того, второе действие может включать одновременное оповещение оператора о пробуксовывании и уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ. Кроме того, второе действие может включать уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, а затем оповещение оператора о пробуксовывании после пороговой продолжительности времени. В качестве примера, если величина пробуксовывания больше, чем второе пороговое значение, можно уменьшить глубину проникновения по меньшей мере одного инструмента для земляных работ. Однако, если величина пробуксовывания остается больше, чем второе пороговое значение, в течение более, чем пороговая продолжительность времени после уменьшения глубины проникновения по меньшей мере одного инструмента для земляных работ, оператора можно предупредить, тем самым информируя оператора, что уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ не уменьшило величину пробуксовывания ниже второго порогового значения.
В некоторых вариантах осуществления систему управления можно выполнить с возможностью регулирования выбранного/запланированного пути внедорожного транспортного средства в зависимости от карты почвы. Например, во время посевных работ и/или операций внесения система управления может устанавливать маршрут внесения продукта (например, семян, удобрений и т.д.) на участки с большим ожидаемым пробуксовыванием, когда уровень продукта в сельскохозяйственном орудии низкий (например, после внесения продукта на участки с низким и/или средним ожидаемым пробуксовыванием). В результате масса орудия уменьшается, когда внедорожное транспортное средство находится в пределах участков с большим ожидаемым пробуксовыванием, тем самым уменьшая давление на землю, прикладываемое орудием и внедорожным транспортным средством (например, за счет уменьшения нагрузки на дышло, прикладываемой сельскохозяйственным орудием к внедорожному транспортному средству). Соответственно, величина пробуксовывания в пределах участков с большим ожидаемым пробуксовыванием может снижаться. Кроме того, когда внедорожное транспортное средство попадает на участок с большим ожидаемым пробуксовыванием, система управления может выдавать сигнал, указывающий команды предупреждения оператора (например, посредством пользовательского интерфейса базовой станции), что ожидается высокая степень пробуксовывания. В то время как внедорожное транспортное средство проходит участок, оператор может отслеживать и/или управлять работой внедорожного транспортного средства (например, в дополнение к системе управления пробуксовыванием) для уменьшения вероятности увязания внедорожного транспортного средства в почве.
В дополнительных вариантах осуществления карту пробуксовывания можно использовать для последующих почвообрабатывающих работ. Например, почва под колесами и/или гусеницами внедорожного транспортного средства может уплотняться и/или становиться изрытой колеями, когда внедорожное транспортное средство движется по участкам с большим пробуксовыванием (например, участкам, имеющим мягкую почву). Так как система управления может обновлять карту почвы по меньшей мере частично на основании определенной величины пробуксовывания, на карте почвы можно идентифицировать участки с большим пробуксовыванием. Соответственно, оператор или автоматизированная система может направлять почвообрабатывающее орудие участки с большим пробуксовыванием для уменьшения уплотнения почвы и/или образования колеи в пределах участков. За счет механической обработки только участков с большим пробуксовыванием по сравнению со всем полем можно существенно уменьшить продолжительность времени и затраты, связанные с почвообрабатывающими работами.
Несмотря на то, что здесь были проиллюстрированы и описаны только определенные признаки изобретения, специалисты в данной области столкнутся с множеством модификаций и изменений. Вследствие этого следует понимать, что приложенная формула изобретения охватывает все модификацим и изменения, которые попадают в рамки сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ МАСШТАБИРОВАНИЕ РЯДОВ ДВИЖЕНИЯ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2721576C1 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ПОЛОСЫ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И ВНЕДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2728604C2 |
| СИСТЕМА МОНИТОРИНГА ОРУДИЯ ДЛЯ ЗЕМЛЯНЫХ РАБОТ И ЕЕ ЭЛЕКТРОННЫЙ КОНТРОЛЛЕР | 2020 |
|
RU2794881C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ОБРАБОТКОЙ ПОЧВЫ СЕЛЬСКОХОЗЯЙСТВЕННЫМ ОРУДИЕМ (ВАРИАНТЫ) | 2013 |
|
RU2580449C2 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2017 |
|
RU2719047C1 |
| СИСТЕМА И СПОСОБ ОБМЕНА ДАННЫМИ ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2730117C2 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ИНСТРУМЕНТА ДЛЯ ВЗАИМОДЕЙСТВИЯ С ЗЕМЛЕЙ НА ОСНОВАНИИ ДАВЛЕНИЯ ТЕКУЧЕЙ СРЕДЫ | 2011 |
|
RU2586156C2 |
| СИСТЕМА ОСВЕЩЕНИЯ СКОРОСТНЫХ МАГИСТРАЛЕЙ (ВАРИАНТЫ) | 2015 |
|
RU2702298C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ СИСТЕМА | 2020 |
|
RU2738484C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ ДЛЯ ИЗБЕЖАНИЯ СТОЛКНОВЕНИЙ И ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2731586C2 |
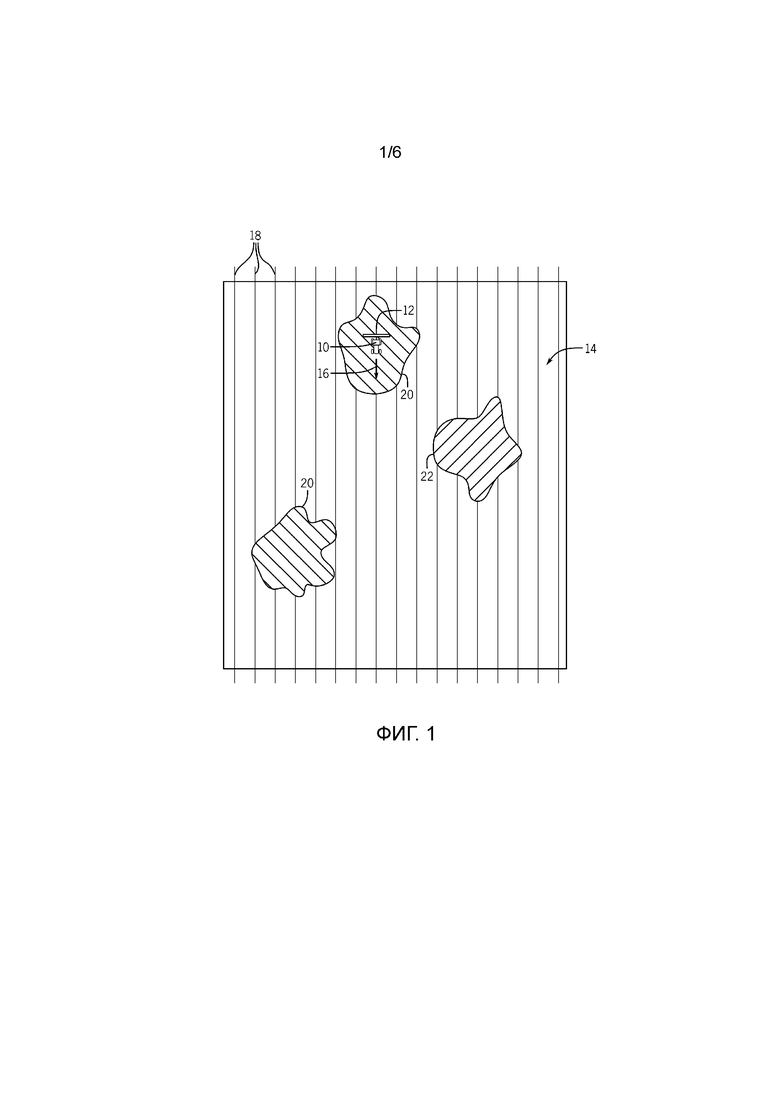
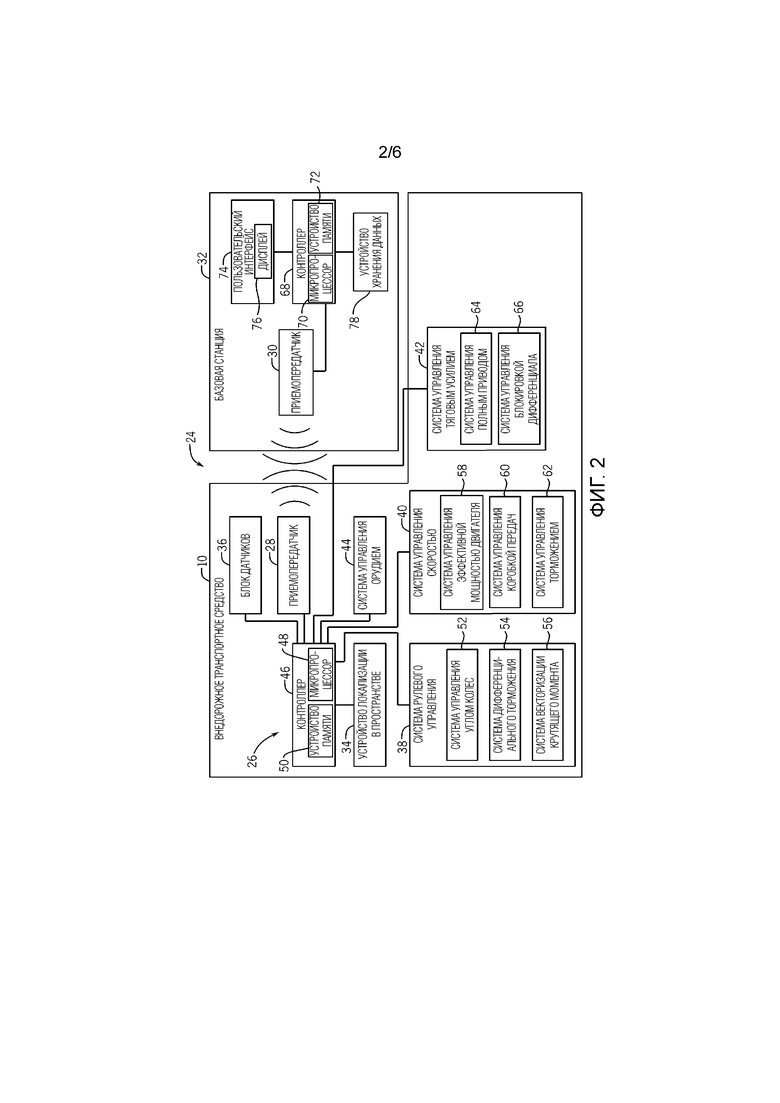
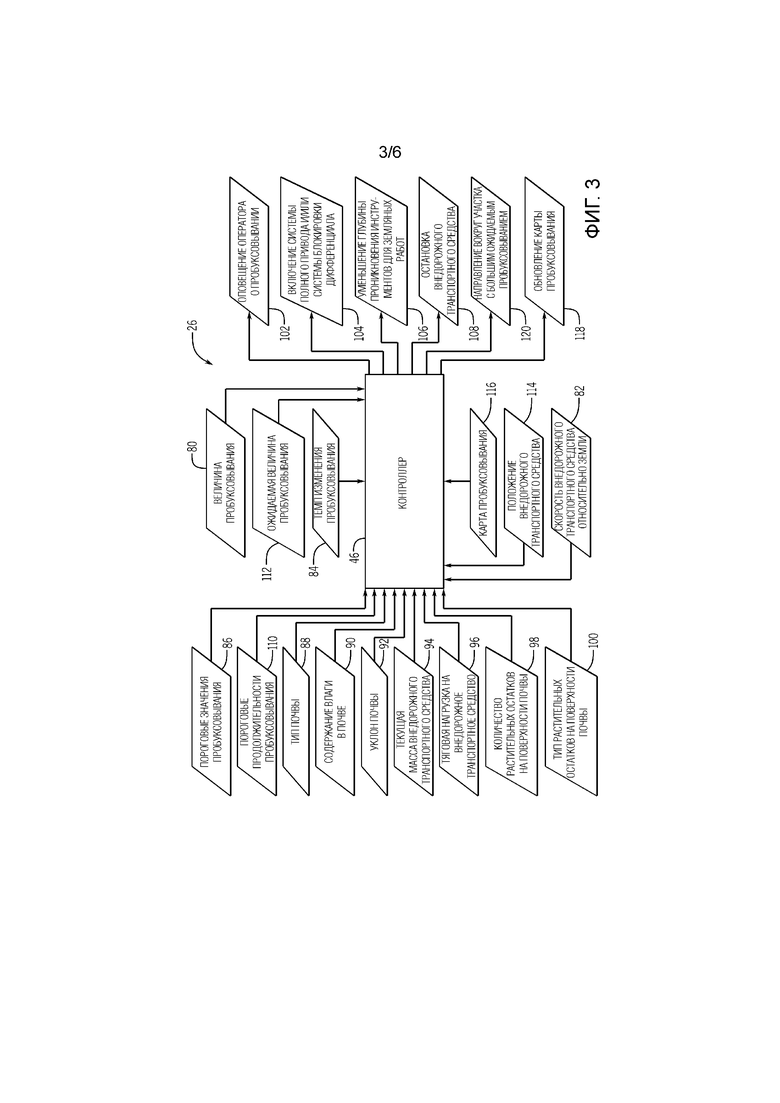
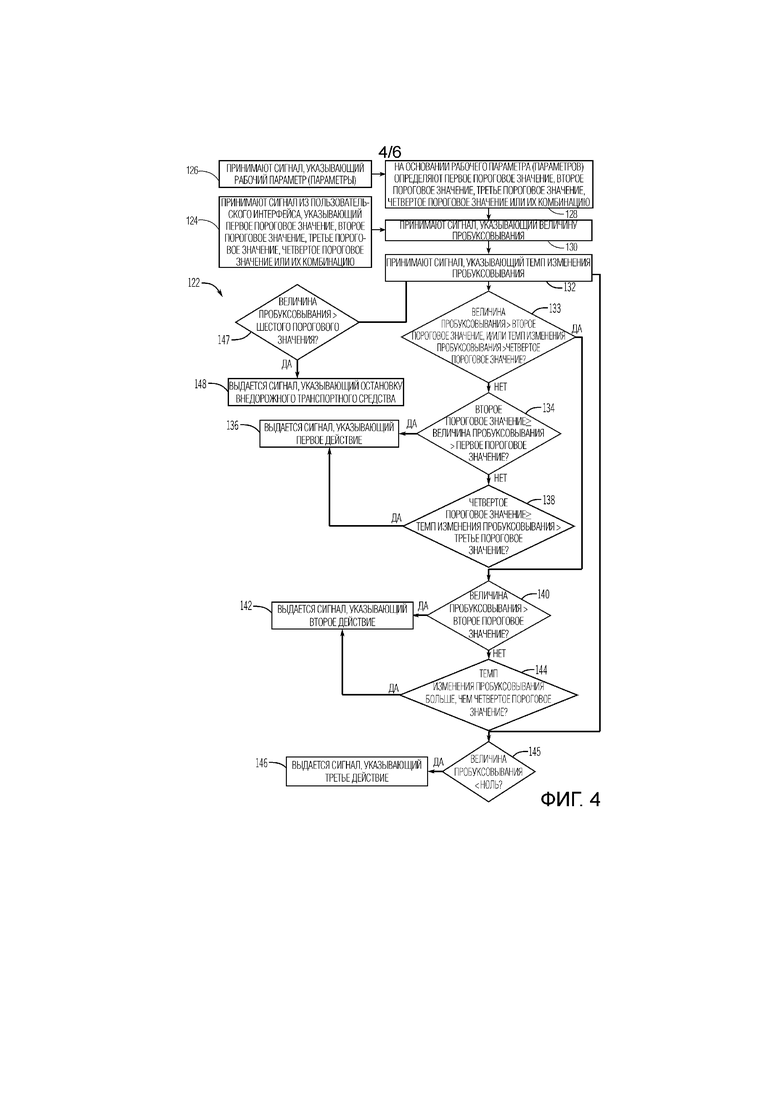
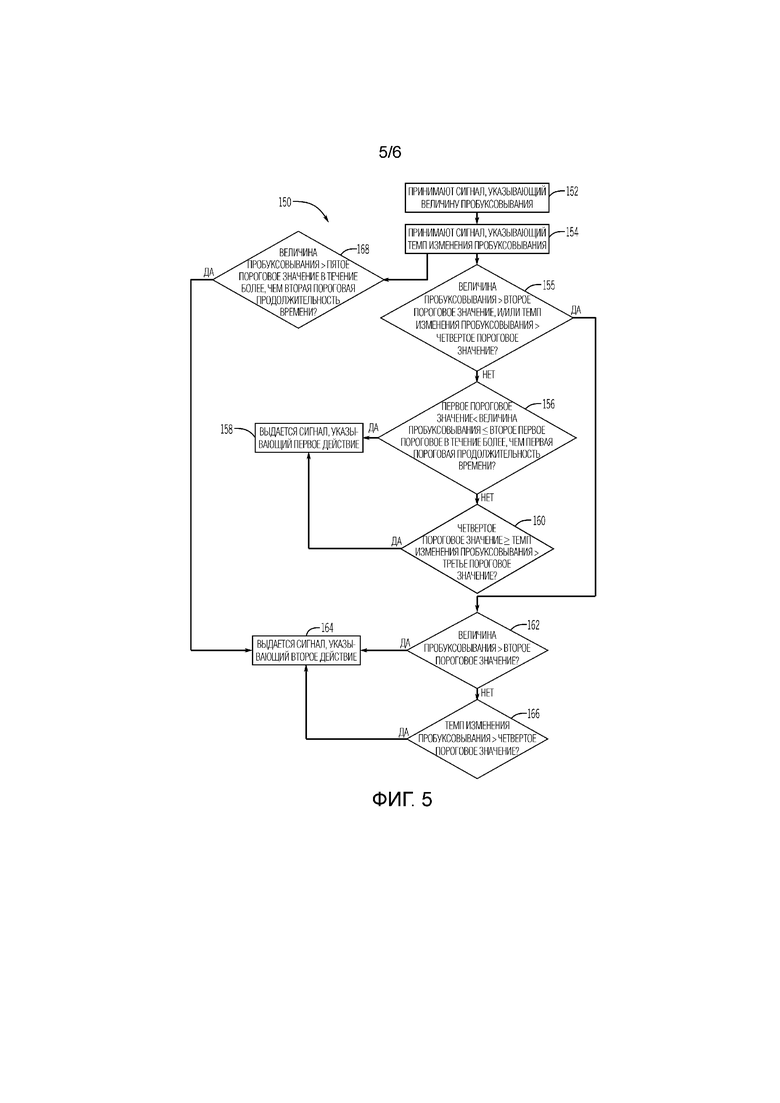
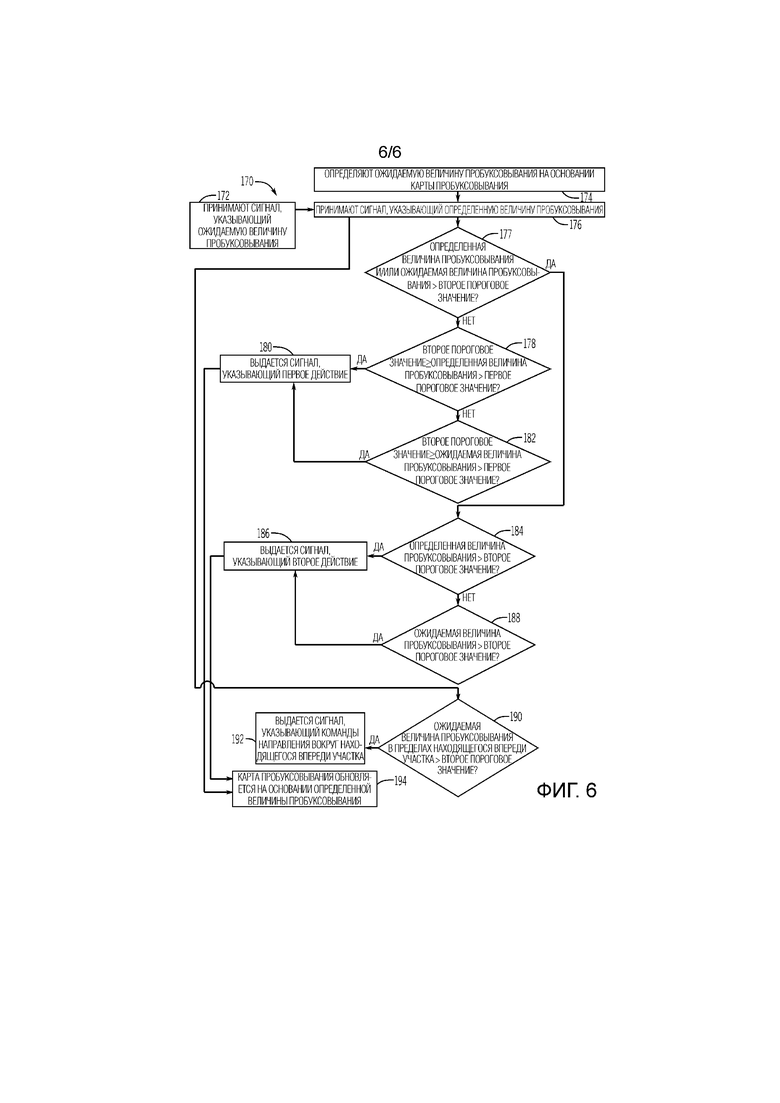
Группа изобретений относится к сельскому хозяйству. Система управления пробуксовыванием для внедорожного транспортного средства содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы, второго сигнала, указывающего темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы или их комбинации. Система управления выполнена с возможностью выдачи третьего сигнала, указывающего первое действие, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению или их комбинации, и нет, если величина пробуксовывания больше, чем второе пороговое значение, темп изменения пробуксовывания больше, чем четвертое пороговое значение, или их комбинация. Система управления выполнена с возможностью выдачи четвертого сигнала, указывающего второе действие, отличающееся от первого действия, если величина пробуксовывания больше, чем второе пороговое значение, темп изменения пробуксовывания больше, чем четвертое пороговое значение, или их комбинация, причем второе пороговое значение больше, чем первое пороговое значение, а четвертое пороговое значение больше, чем третье пороговое значение. Система управления пробуксовыванием для внедорожного транспортного средства содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы, с возможностью выдачи второго сигнала, указывающего первое действие, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем первая пороговая продолжительность времени, и с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, если величина пробуксовывания больше, чем второе пороговое значение, причем второе пороговое значение больше, чем первое пороговое значение. Система управления пробуксовыванием для внедорожного транспортного средства содержит систему управления, выполненную с возможностью приема первого сигнала, указывающего определенную величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы. Система управления выполнена с возможностью выдачи второго сигнала, указывающего первое действие, если определенная величина пробуксовывания, ожидаемая величина пробуксовывания внедорожного транспортного средства относительно поверхности почвы или их комбинация больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и нет, если определенная величина пробуксовывания, ожидаемая величина пробуксовывания или их комбинация больше, чем второе пороговое значение. Система управления выполнена с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, если определенная величина пробуксовывания, ожидаемая величина пробуксовывания или их комбинация больше, чем второе пороговое значение, причем второе пороговое значение больше, чем первое пороговое значение. Обеспечивается повышение эффективности сельскохозяйственных работ. 3 н. и 17 з.п. ф-лы, 6 ил.
1. Система управления пробуксовыванием для внедорожного транспортного средства, содержащая:
систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы, второго сигнала, указывающего темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы или их комбинации, причем система управления выполнена с возможностью выдачи третьего сигнала, указывающего первое действие, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению или их комбинации, и нет, если величина пробуксовывания больше, чем второе пороговое значение, темп изменения пробуксовывания больше, чем четвертое пороговое значение, или их комбинация, и система управления выполнена с возможностью выдачи четвертого сигнала, указывающего второе действие, отличающееся от первого действия, если величина пробуксовывания больше, чем второе пороговое значение, темп изменения пробуксовывания больше, чем четвертое пороговое значение, или их комбинация;
причем второе пороговое значение больше, чем первое пороговое значение, а четвертое пороговое значение больше, чем третье пороговое значение.
2. Система управления пробуксовыванием по п. 1, в которой первое действие включает оповещение оператора, что величина пробуксовывания больше, чем первое пороговое значение, что темп изменения пробуксовывания больше, чем третье пороговое значение или их комбинация.
3. Система управления пробуксовыванием по п. 1, в которой первое действие включает в себя включение системы полного привода, включение системы блокировки дифференциала или их комбинацию.
4. Система управления пробуксовыванием по п. 1, в которой второе действие включает уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ.
5. Система управления пробуксовыванием по п. 1, в которой второе действие включает остановку внедорожного транспортного средства.
6. Система управления пробуксовыванием по п. 1, которая выполнена с возможностью приема пятого сигнала от пользовательского интерфейса, указывающего первое пороговое значение, второе пороговое значение, третье пороговое значение, четвертое пороговое значение или их комбинацию.
7. Система управления пробуксовыванием по п. 1, которая выполнена с возможностью приема шестого сигнала, указывающего тип почвы, содержание влаги в почве, уклон почвы, текущую массу внедорожного транспортного средства, тяговую нагрузку на внедорожное транспортное средство, количество растительных остатков на поверхности почвы, тип растительных остатков на поверхности почвы или их комбинацию, и система управления выполнена с возможностью определения первого порогового значения, второго порогового значения, третьего порогового значения, четвертого порогового значения или их комбинации по меньшей мере частично на основании шестого сигнала.
8. Система управления пробуксовыванием по п. 1, которая выполнена с возможностью выдачи седьмого сигнала, указывающего третье действие, если величина пробуксовывания меньше, чем ноль.
9. Система управления пробуксовыванием для внедорожного транспортного средства, содержащая:
систему управления, выполненную с возможностью приема первого сигнала, указывающего величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы, с возможностью выдачи второго сигнала, указывающего первое действие, если величина пробуксовывания больше, чем первое пороговое значение, и меньше или равна второму пороговому значению в течение более, чем первая пороговая продолжительность времени, и с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, если величина пробуксовывания больше, чем второе пороговое значение;
причем второе пороговое значение больше, чем первое пороговое значение.
10. Система управления пробуксовыванием по п. 9, которая выполнена с возможностью приема четвертого сигнала, указывающего темп изменения пробуксовывания внедорожного транспортного средства относительно поверхности почвы, и система управления выполнена с возможностью выдачи второго сигнала, если темп изменения пробуксовывания больше, чем третье пороговое значение, и меньше или равен четвертому пороговому значению, и нет, если величина пробуксовывания больше, чем второе пороговое значение, с возможностью выдачи третьего сигнала, если темп изменения пробуксовывания больше, чем четвертое пороговое значение, или их комбинация;
причем система управления выполнена с возможностью не выдачи второго сигнала, если темп изменения пробуксовывания больше, чем четвертое пороговое значение.
11. Система управления пробуксовыванием по п. 9, которая выполнена с возможностью выдачи третьего сигнала и не выдачи второго сигнала, если величина пробуксовывания больше, чем пятое пороговое значение в течение более, чем вторая пороговая продолжительность времени, пятое пороговое значение больше или равно первому пороговому значению, и пятое пороговое значение меньше, чем второе пороговое значение.
12. Система управления пробуксовыванием по п. 9, в которой первое действие включает оповещение оператора, что величина пробуксовывания больше, чем первое пороговое значение в течение более, чем первая пороговая продолжительность времени, включение системы полного привода, включение системы блокировки дифференциала или их комбинацию.
13. Система управления пробуксовыванием по п. 9, в которой второе действие включает уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, остановку внедорожного транспортного средства или их комбинацию.
14. Система управления пробуксовыванием для внедорожного транспортного средства, содержащая:
систему управления, выполненную с возможностью приема первого сигнала, указывающего определенную величину пробуксовывания внедорожного транспортного средства относительно поверхности почвы, причем система управления выполнена с возможностью выдачи второго сигнала, указывающего первое действие, если определенная величина пробуксовывания, ожидаемая величина пробуксовывания внедорожного транспортного средства относительно поверхности почвы или их комбинация больше, чем первое пороговое значение, и меньше или равна второму пороговому значению, и нет, если определенная величина пробуксовывания, ожидаемая величина пробуксовывания или их комбинация больше, чем второе пороговое значение, и система управления выполнена с возможностью выдачи третьего сигнала, указывающего второе действие, отличающееся от первого действия, если определенная величина пробуксовывания, ожидаемая величина пробуксовывания или их комбинация больше, чем второе пороговое значение;
причем второе пороговое значение больше, чем первое пороговое значение.
15. Система управления пробуксовыванием по п. 14, которая выполнена с возможностью приема четвертого сигнала, указывающего ожидаемую величину пробуксовывания, для определения ожидаемой величины пробуксовывания по меньшей мере частично на основании карты пробуксовывания или их комбинации.
16. Система управления пробуксовыванием по п. 15, в которой карта пробуксовывания содержит погодные данные, данные влажности почвы, топографические данные или их комбинацию.
17. Система управления пробуксовыванием по п. 15, которая выполнена с возможностью обновления карты пробуксовывания по меньшей мере частично на основании определенной величины пробуксовывания.
18. Система управления пробуксовыванием по п. 14, в которой первое действие включает оповещение оператора, что определенная величина пробуксовывания, ожидаемая величина пробуксовывания или их комбинация больше, чем первое пороговое значение, включение системы полного привода, включение системы блокировки дифференциала или их комбинацию.
19. Система управления пробуксовыванием по п. 14, в которой второе действие включает уменьшение глубины проникновения по меньшей мере одного инструмента для земляных работ, остановку внедорожного транспортного средства или их комбинацию.
20. Система управления пробуксовыванием по п. 14, которая выполнена с возможностью выдачи пятого сигнала, указывающего команды для направления внедорожного транспортного средства вокруг участка, если ожидаемая величина пробуксовывания в пределах участка больше, чем второе пороговое значение.
| Устройство автоматического управления средствами повышения проходимости колесных машин | 1987 |
|
SU1602782A1 |
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1987 |
|
SU1418091A1 |
| US 6533367 B1, 18.03.2003 | |||
| US 6577942 B1, 10.06.2003 | |||
| DE 10219270 C1, 24.04.2003 | |||
| DE 102008001879 A1, 26.11.2009. | |||

