Ссылка на родственные заявки
Согласно настоящей заявке испрашивается приоритет и преимущество в соответствии с заявкой США на выдачу патента № 15/166222, озаглавленной «СИСТЕМА ЗАНЯТИЯ ПОЛОСЫ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА», поданной 27 мая 2016 года, которая включена в настоящее описание посредством ссылки в полном объеме.
Уровень техники
Настоящее раскрытие относится в целом к системе занятия полосы для сельскохозяйственного транспортного средства.
Некоторыми сельскохозяйственными транспортными средствами, такими как тракторы или другие тягачи, во время определенных этапов работы может управлять система управления (например, без ввода данных оператором, с ограниченным вводом данных оператором и т.д.). Например, контроллер может отправлять системе рулевого управления и/или системе управления скоростью сельскохозяйственного транспортного средства команды автоматического или полуавтоматического направления сельскохозяйственного транспортного средства по направляющей полосе через поле. В некоторых сельскохозяйственных транспортных средствах оператор может вручную направлять (например, с помощью рулевого управления) сельскохозяйственное транспортное средство в сторону направляющей полосы и выравнивать сельскохозяйственное транспортное средство с направляющей полосой перед тем, как подключить систему управления. К сожалению, процесс занятия направляющей полосы вручную может быть неэффективным, что увеличивает потребление топлива и/или замедляет сельскохозяйственные работы.
Раскрытие изобретения
В одном варианте осуществления способ управления сельскохозяйственным транспортным средством включает получение процессором первого сигнала от пользовательского интерфейса, указывающего значение по меньшей мере одного параметра. Способ также включает определение процессором траектории сельскохозяйственного транспортного средства в сторону направляющей полосы по меньшей мере частично на основе по меньшей мере одного параметра. Кроме того, способ включает вывод процессором на дисплей пользовательского интерфейса второго сигнала, указывающего команды для предоставления графического отображения траектории сельскохозяйственного транспортного средства. Кроме того, способ включает управление сельскохозяйственным транспортным средством процессором по меньшей мере частично на основе по меньшей мере одного параметра после получения от пользовательского интерфейса по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра.
В другом варианте осуществления система управления сельскохозяйственным транспортным средством содержит пользовательский интерфейс, имеющий дисплей. Пользовательский интерфейс выполнен с возможностью подачи первого сигнала, указывающего значение по меньшей мере одного параметра. Система управления также содержит контроллер, связанный с возможностью передачи данных с пользовательским интерфейсом, причем контроллер выполнен с возможностью определения траектории сельскохозяйственного транспортного средства в сторону направляющей полосы по меньшей мере частично на основе по меньшей мере одного параметра. Кроме того, контроллер выполнен с возможностью вывода на дисплей второго сигнала, указывающего команды для представления графического отображения траектории, и контроллер выполнен с возможностью управления сельскохозяйственным транспортным средством по меньшей мере частично на основе по меньшей мере одного параметра после получения от пользовательского интерфейса по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра.
В дополнительном варианте осуществления устройство содержит по меньшей мере один энергонезависимый, материальный машиночитаемый носитель, имеющий закодированные на нем команды для выполнения процессором. Команды включают команды для получения от пользовательского интерфейса первого сигнала, указывающего значение по меньшей мере одного параметра. Команды также включают команды определения траектории сельскохозяйственного транспортного средства в сторону направляющей полосы по меньшей мере частично на основе по меньшей мере одного параметра. Кроме того, команды включают команды вывода на дисплей пользовательского интерфейса второго сигнала, указывающего команды представления графического отображения траектории сельскохозяйственного транспортного средства. Команды также включают команды управления сельскохозяйственным транспортным средством по меньшей мере частично на основе по меньшей мере одного параметра после получения от пользовательского интерфейса по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра.
Краткое описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего раскрытия станут более понятными при прочтении следующего подробного описания со ссылкой на прилагаемые чертежи, на которых одинаковыми ссылочными позициями обозначены одинаковые детали на всех чертежах и на которых:
На ФИГ. 1 показан вид сверху варианта осуществления сельскохозяйственного транспортного средства, выполненного с возможностью включения и следования по направляющей полосе по полю;
На ФИГ. 2 показан схематичный чертеж варианта осуществления системы управления, которую можно использовать в сельскохозяйственном транспортном средстве ФИГ. 1;
На ФИГ. 3 показана схема варианта осуществления дисплея, который можно использовать в пользовательском интерфейсе системы управления ФИГ. 2;
На ФИГ. 4A-4C показаны схемы части дисплея ФИГ. 3, где на каждой схеме показаны различные отклонения;
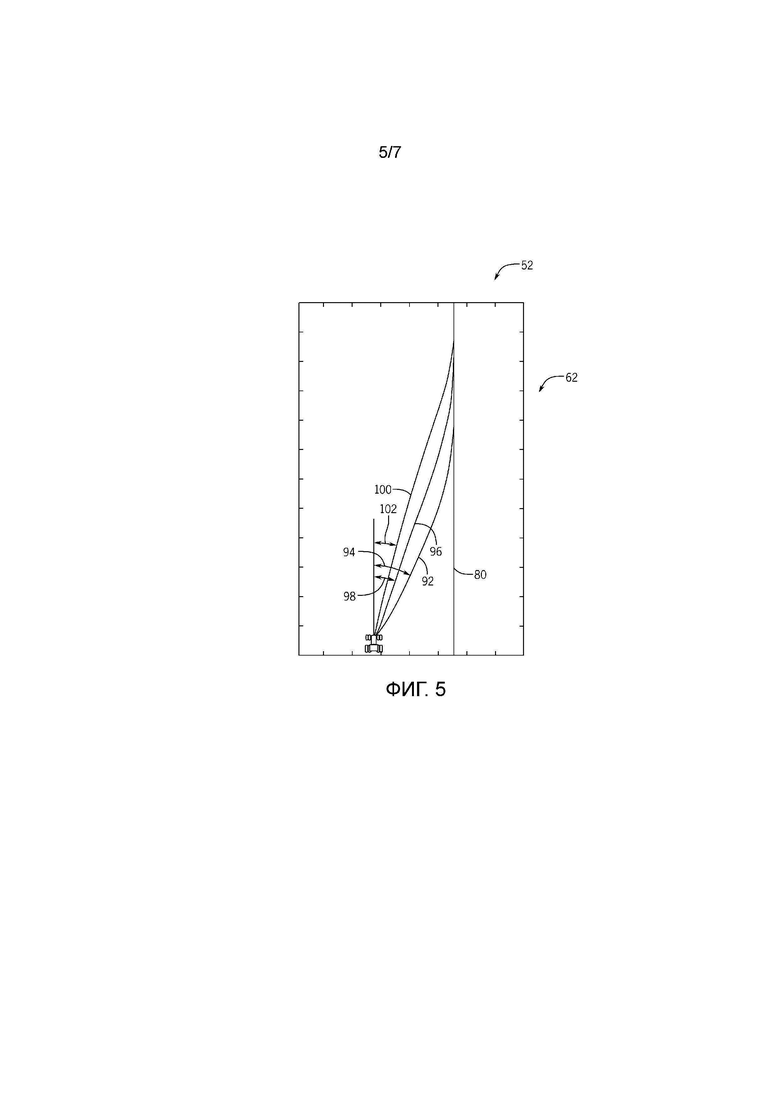
На ФИГ. 5 показана схема части дисплея ФИГ. 3, показывающая разные углы приближения к направляющей полосе;
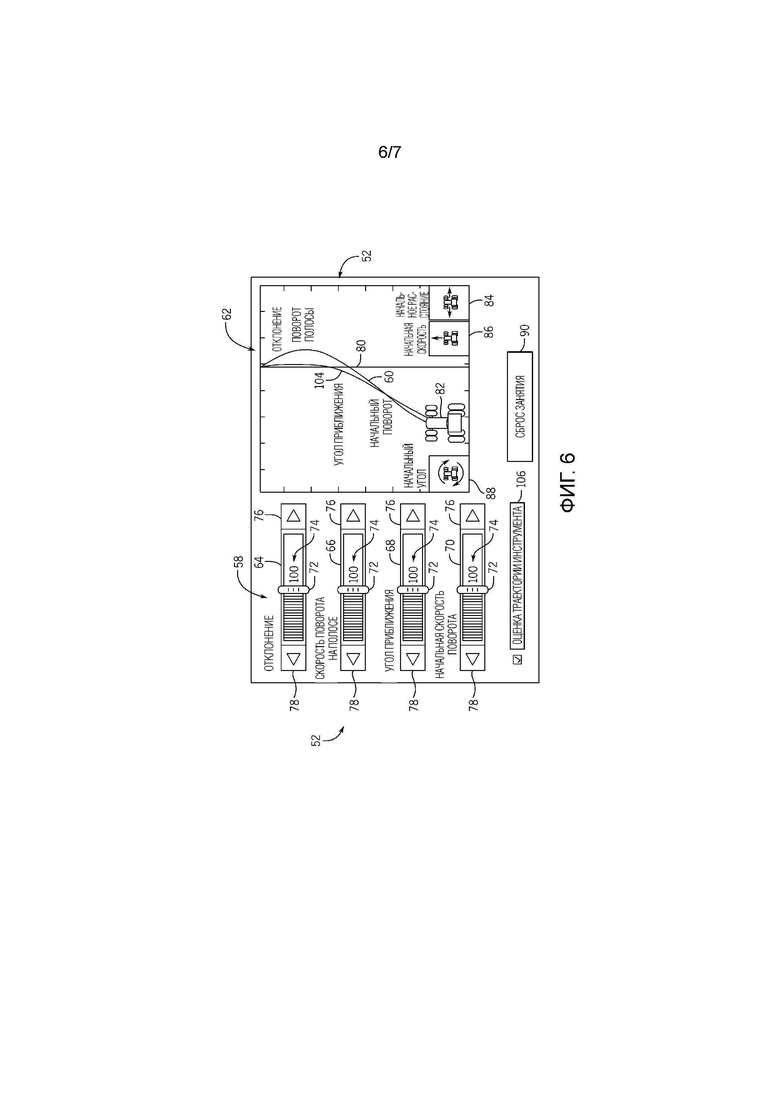
На ФИГ. 6 показана схема альтернативного варианта осуществления дисплея, который можно использовать в пользовательском интерфейсе системы управления ФИГ. 2; а
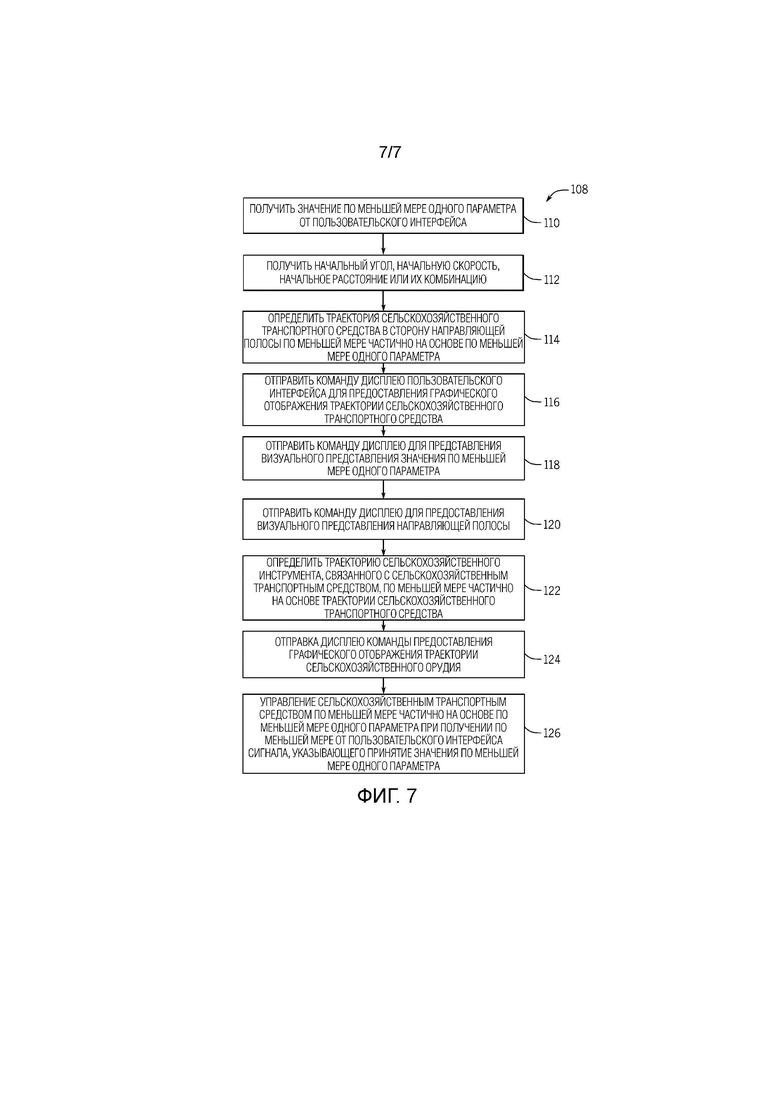
На ФИГ. 7 показана блок-схема варианта осуществления способа управления сельскохозяйственным транспортным средством.
Подробное описание изобретения
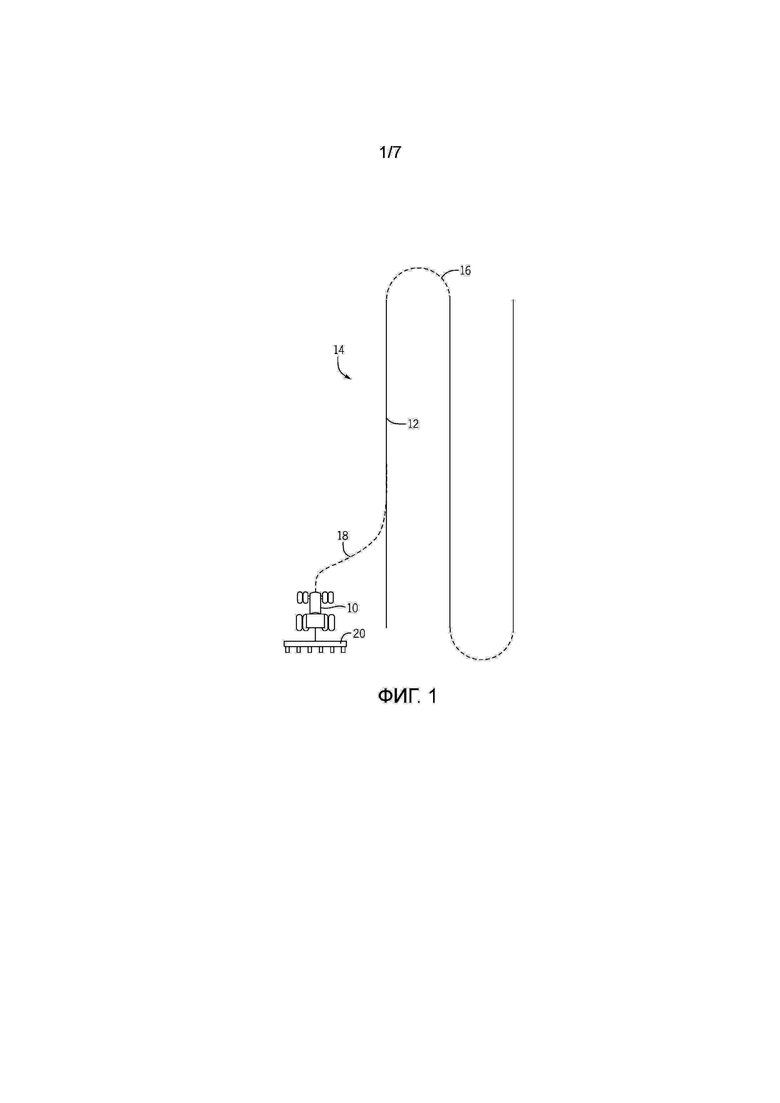
Обращаясь далее к чертежам на ФИГ. 1 показан вид сверху варианта осуществления сельскохозяйственного транспортного средства 10, выполненного с возможностью включения и следования по направляющей полосе 12 по полю 14. В проиллюстрированном варианте осуществления сельскохозяйственное транспортное средство 10 содержит систему управления, выполненную с возможностью автоматического направления сельскохозяйственного транспортного средства 10 вдоль направляющей полосы 12. В некоторых вариантах осуществления направляющую полосу 12 можно создать путем сохранения точек данных, связанных с местоположениями сельскохозяйственного транспортного средства, пока сельскохозяйственное транспортное средство передвигается по полю. В других вариантах осуществления направляющую полосу 12 можно создать путем нанесения направляющей полосы на электронную карту поля. После создания направляющей полосы 12 система управления может автоматически направлять сельскохозяйственное транспортное средство 10 вдоль направляющей полосы 12 без ввода данных оператором. В некоторых вариантах осуществления система управления может также автоматически направлять сельскохозяйственное транспортное средство 10 в повороты 16 на краю поля между сегментами направляющей полосы 12. Однако в альтернативных вариантах осуществления во время поворотов на краю поля оператор может вручную управлять сельскохозяйственным транспортным средством.
До начала сельскохозяйственных работ сельскохозяйственное транспортное средство 10 может располагаться отдаленно от направляющей полосы 12. В некоторых вариантах осуществления система управления автоматически направляет сельскохозяйственное транспортное средство 10 по траектории 18 занятия полосы к направляющей полосе 12 для того, чтобы выровнять сельскохозяйственное транспортное средство 10 с направляющей полосой 12 в начале сельскохозяйственных работ. Траекторию 18 занятия полосы можно регулировать на основе ввода оператором одного или нескольких параметров (например, начальной скорости поворота сельскохозяйственного транспортного средства, угла приближения сельскохозяйственного транспортного средства к направляющей полосе, скорости поворота сельскохозяйственного транспортного средства на полосе, отклонений от направляющей полосы и т.д.). Однако без точного понимания влияния изменения параметра (параметров) оператор не может выбирать параметр (параметры), которые устанавливают эффективную траекторию 18 занятия полосы. Соответственно, в некоторых вариантах осуществления система управления представляет собой визуальное отображение траектории занятия полосы для оператора, которое основано хотя бы частично на параметре (параметрах). Оператор может отрегулировать параметр (параметры) и посмотреть получившееся влияние на траекторию занятия полосы. После того, как отображаемая траектория занятия полосы станет приемлемой для оператора, оператор может принять параметр (параметры) (например, посредством подключения автоматического управления сельскохозяйственным транспортным средством 10). Затем система управления может управлять сельскохозяйственным транспортным средством таким образом, чтобы направлять сельскохозяйственное транспортное средство по траектории 18 занятия полосы, которая основана по меньшей мере частично на принятом параметре (параметрах).
В некоторых вариантах осуществления система управления содержит пользовательский интерфейс, имеющий дисплей. Система управления также содержит контроллер, связанный с возможностью передачи данных с пользовательским интерфейсом. Пользовательский интерфейс выполнен с возможностью подачи контроллеру первого сигнала, указывающего значение по меньшей мере одного параметра (например, начальной скорости поворота сельскохозяйственного транспортного средства, угла приближения сельскохозяйственного транспортного средства к направляющей полосе, скорости поворота сельскохозяйственного транспортного средства на полосе, отклонения от направляющей полосы и т.д.), и контроллер выполнен с возможностью определения траектории сельскохозяйственного транспортного средства в сторону направляющей полосы по меньшей мере частично на основе по меньшей мере одного параметра. Кроме того, контроллер выполнен с возможностью вывода на дисплей второго сигнала, указывающего команды представления графического отображения траектории. Соответственно, оператор может изменять по меньшей мере один параметр, пока траектория, показанная на дисплее, не станет приемлемой для оператора (например, располагает инструмент 20 на направляющей полосе в течение требуемой продолжительности времени, уменьшает боковые нагрузки и т.д.). После установления приемлемой траектории оператор может принять значение по меньшей мере одного параметра (например, посредством подключения автоматического управления сельскохозяйственным транспортным средством посредством пользовательского интерфейса, отправляя системе управления команды обновления траектории занятия полосы и т.д.). Затем контроллер может управлять сельскохозяйственным транспортным средством по меньшей мере частично на основе по меньшей мере одного параметра после получения от пользовательского интерфейса по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра. Поскольку система управления позволяет оператору визуализировать влияние изменения параметра (параметров), оператор может выбрать параметр (параметры), которые устанавливают эффективную траекторию занятия полосы (например, траекторию занятия полосы, которая уменьшает потребление топлива, уменьшает время занятия полосы для инструмента 20 и т.д.) и/или траекторию занятия полосы, которая уменьшает боковые нагрузки.
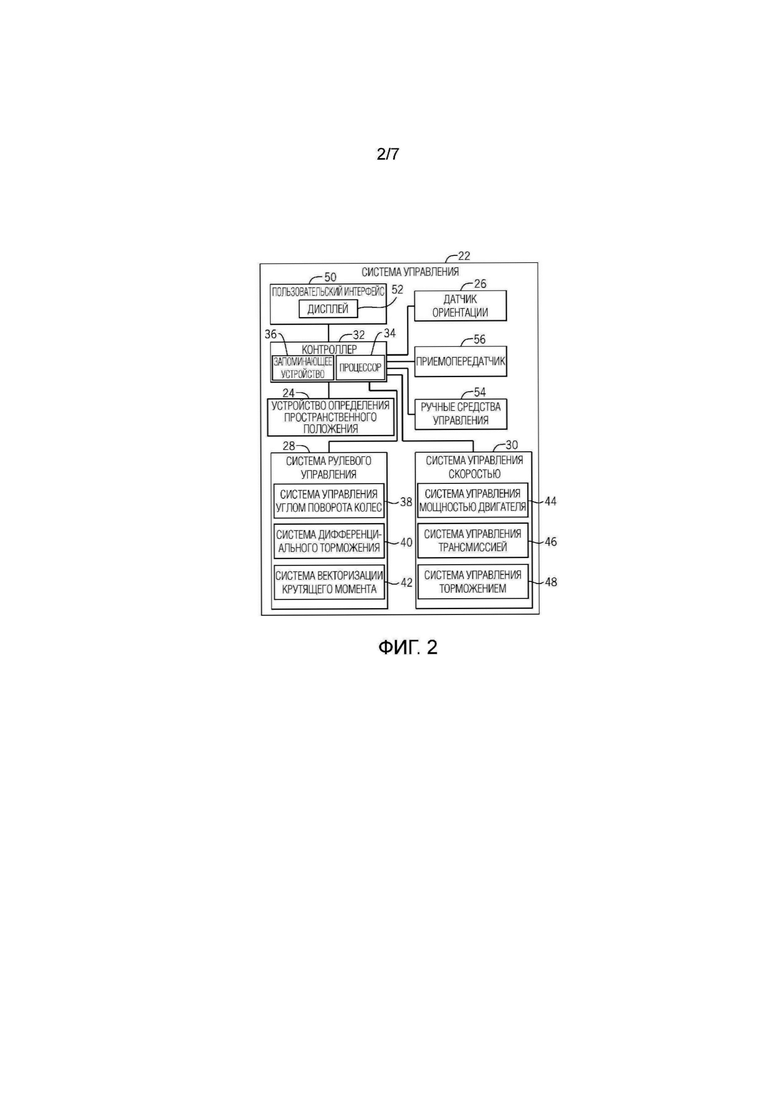
На ФИГ. 2 показан схематичный чертеж варианта осуществления системы 22 управления, которую можно использовать в сельскохозяйственном транспортном средстве ФИГ. 1. В проиллюстрированном варианте осуществления система 22 управления содержит устройство 24 определения пространственного положения, которое установлено на сельскохозяйственном транспортном средстве и выполнено с возможностью определения положения и скорости сельскохозяйственного транспортного средства. Как будет понятно, устройство определения пространственного положения может содержать любую подходящую систему, выполненную с возможностью, например, определения положения и скорости сельскохозяйственного транспортного средства, например, приемник глобальной системы определения местоположения (GPS). В некоторых вариантах осуществления устройство 24 определения пространственного положения может быть выполнено с возможностью определения положения и скорости сельскохозяйственного транспортного средства относительно неподвижной точки в пределах поля (например, посредством фиксированного приемопередатчика). Соответственно, устройство 24 определения пространственного положения может быть выполнено с возможностью определения положения и скорости сельскохозяйственного транспортного средства относительно фиксированной глобальной системы координат (например, посредством приемника GPS) или фиксированной локальной системы координат.
Кроме того, система 22 управления содержит датчик 26 ориентации, выполненный с возможностью определения угла продольного наклона, угла отклонения от направления, угла поперечного наклона сельскохозяйственного транспортного средства или их комбинации. Например, датчик 26 ориентации может представлять собой гироскоп или другой датчик, выполненный с возможностью управления ориентацией сельскохозяйственного транспортного средства. В некоторых вариантах осуществления датчик 26 ориентации также выполнен с возможностью определения угловой скорости продольного наклона, угловой скорости отклонения от направления, угловой скорости поперечного наклона или их комбинации.
В проиллюстрированном варианте осуществления система 22 управления содержит систему 28 рулевого управления, выполненную с возможностью управления направлением движения сельскохозяйственного транспортного средства, и систему 30 управления скоростью, выполненную с возможностью управления скоростью сельскохозяйственного транспортного средства. Кроме того, система 22 управления содержит контроллер 32, связанный с возможностью передачи данных с устройством 24 определения пространственного положения, с датчиком 26 ориентации, с системой 28 рулевого управления и с системой 30 управления скоростью. Контроллер 32 выполнен с возможностью автоматического управления сельскохозяйственным транспортным средством во время занятия полосы и пока сельскохозяйственное транспортное средство движется вдоль направляющей полосы, тем самым повышая эффективность сельскохозяйственных работ.
В некоторых вариантах осуществления контроллер 32 представляет собой электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных от устройства 24 определения пространственного положения, датчика 26 ориентации, других компонентов системы 22 управления или их комбинации. В проиллюстрированном варианте осуществления контроллер 32 содержит процессор, такой как проиллюстрированный микропроцессор 34, и запоминающее устройство 36. Контроллер 32 также может содержать одно или несколько устройств хранения данных и/или другие подходяще компоненты. Процессор 34 можно использовать для выполнения программ, таких как программы для управления сельскохозяйственным транспортным средством, программы для отображения траектории занятия полосы и т.д. Кроме того, процессор 34 может включать в себя несколько микропроцессоров, один или несколько микропроцессоров «общего назначения», один или несколько микропроцессоров специального назначения и/или одну или несколько специализированных интегральных схем (ASICS) или их комбинацию. Например, процессор 34 может содержать один или несколько процессоров с сокращенным набором команд (RISC).
Запоминающее устройство 36 может представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (ОЗУ) и/или энергонезависимое запоминающее устройство, такое как постоянное запоминающее устройство (ПЗУ). В запоминающем устройстве 36 можно хранить разнообразную информацию, и его можно использовать для различных целей. Например, запоминающее устройство 36 может хранить исполняемые процессором команды (например, прошивку или программное обеспечение) для выполнения процессором 34, например, команды управления сельскохозяйственным транспортным средством, команды отображения траектории занятия полосы и т.д. Устройство (устройства) хранения (например, энергонезависимое запоминающее устройство) может представлять собой ПЗУ, флэш-память, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный носитель данных или их комбинацию. В устройстве (устройствах) хранения можно хранить данные (например, данные о местоположении, параметр (параметры) траектории занятия полосы и т.д.), команды (например, программное обеспечение или прошивку для управления сельскохозяйственным транспортным средством и т.д.) и любые другие подходящие данные.
В проиллюстрированном варианте осуществления система 28 рулевого управления содержит систему 38 управления углом поворота колес, систему 40 дифференциального торможения и систему 42 векторизации крутящего момента. Система 38 управления углом поворота колес может автоматически поворачивать одно или несколько колес и/или гусениц транспортного средства (например, с помощью гидравлических приводов) для направления сельскохозяйственного транспортного средства вдоль требуемого маршрута (например, вдоль направляющей полосы, по траектории занятия полосы и т.д.). В качестве примера система 38 управления углом поворота колес может поворачивать передние колеса/гусеницы, задние колеса/гусеницы и/или промежуточные колеса/гусеницы сельскохозяйственного транспортного средства либо отдельно, либо группами. Система 40 дифференциального торможения может независимо изменять тормозное усилие на каждой боковой стороне сельскохозяйственного транспортного средства для направления сельскохозяйственного транспортного средства по траектории. Аналогично, система 42 векторизации крутящего момента может дифференцированно прикладывать крутящий момент от двигателя к колесам и/или гусеницам на каждой боковой стороне сельскохозяйственного транспортного средства, тем самым направляя сельскохозяйственное транспортное средство по траектории. Хотя проиллюстрированная система 28 рулевого управления содержит систему 38 управления углом поворота колес, систему 40 дифференциального торможения и систему 42 векторизации крутящего момента, следует понимать, что в альтернативных вариантах осуществления может иметься одна или две из этих систем в любой подходящей комбинации. В других вариантах осуществления может иметься система 28 рулевого управления, имеющая другие и/или дополнительные системы для облегчения направления сельскохозяйственного транспортного средства по траектории через поле.
В проиллюстрированном варианте осуществления система 30 управления скоростью содержит систему 44 управления мощностью двигателя, систему 46 управления трансмиссией и систему 48 управления торможением. Система 44 управления мощностью двигателя выполнена с возможностью изменения мощности двигателя, чтобы контролировать скорость сельскохозяйственного транспортного средства. Например, система 44 управления мощностью двигателя может изменять настройку дроссельной заслонки двигателя, топливно-воздушную смесь двигателя, регулировку момента зажигания двигателя, другие подходящие параметры двигателя для управления мощностью двигателя или их комбинацию. Кроме того, система 46 управления трансмиссией может регулировать коэффициент полезного действия трансмиссии для управления скоростью сельскохозяйственного транспортного средства. Кроме того, система 48 управления торможением может регулировать тормозное усилие, тем самым регулируя скорость сельскохозяйственного транспортного средства. Хотя проиллюстрированная система 30 управления скоростью содержит систему 44 управления мощностью двигателя, систему 46 управления трансмиссией и систему 48 управления торможением, следует понимать, что в альтернативных вариантах осуществления может иметься одна или две из этих систем в любой подходящей комбинации. В других вариантах осуществления для облегчения регулирования скорости сельскохозяйственного транспортного средства может иметься система 30 управления скоростью, имеющая другие и/или дополнительные системы.
В некоторых вариантах осуществления система управления также может управлять работой сельскохозяйственного инструмента, связанного с сельскохозяйственным транспортным средством. Например, система управления может содержать систему управления инструментом/контроллер инструмента, выполненные с возможностью управления углом поворота инструмента (например, посредством системы рулевого управления инструмента, имеющей систему управления углом поворота колес и/или систему дифференциального торможения) и/или систему скорости сельскохозяйственного транспортного средства/инструмента (например, посредством системы управления скоростью инструмента, имеющей систему управления торможением). В таких вариантах осуществления система управления может быть связана с возможностью передачи данных с системой управления/контроллером на инструменте через сеть передачи данных, такую как сеть контроллеров (CAN-шина).
В проиллюстрированном варианте осуществления система 22 управления содержит пользовательский интерфейс 50, связанный с возможностью передачи данных с контроллером 32. Пользовательский интерфейс 50 выполнен с возможностью выборочной подачи команд контроллеру 32, чтобы автоматически управлять сельскохозяйственным транспортным средством на основе ввода данных оператором. Например, оператор может располагать сельскохозяйственное транспортное средство вблизи направляющей полосы, а затем подключать автоматическое управление через ввод данных в пользовательском интерфейсе 50. Контроллер 32, в свою очередь, может направлять сельскохозяйственное транспортное средство в сторону направляющей полосы (например, посредством подачи команд системе 28 рулевого управления, системе 30 управления скоростью, системе управления инструментом/контроллером инструмента или их комбинации). В некоторых вариантах осуществления пользовательский интерфейс содержит дисплей 52, выполненный с возможностью предоставления оператору информации, такой как графическое отображение направляющей полосы, графическое отображение траектории занятия полосы, визуальное отображение определенного параметра (параметров) или их комбинации. Кроме того, как подробно описано ниже, пользовательский интерфейс 50 (например, посредством дисплея 52, посредством других средств управления и т.д.) может позволить оператору вводить значение (значения) определенного параметра (параметров), тем самым управляя визуальным представлением траектории занятия полосы.
В некоторых вариантах осуществления пользовательский интерфейс 50 выполнен с возможностью подачи первого сигнала, указывающего значение по меньшей мере одного параметра занятия полосы, и контроллер 32 выполнен с возможностью определения траектории сельскохозяйственного транспортного средства в сторону направляющей полосы по меньшей мере частично на основе по меньшей мере одного параметра. Кроме того, контроллер 32 выполнен с возможностью вывода на дисплей 52 второго сигнала, указывающего команды представления графического отображения траектории. Кроме того, контроллер 32 выполнен с возможностью управления сельскохозяйственным транспортным средством, и в некоторых вариантах осуществления, сельскохозяйственным инструментом, по меньшей мере частично на основе по меньшей мере одного параметра после получения от пользовательского интерфейса по меньшей мере третьего сигнала 50, указывающего на принятие значения по меньшей мере одного параметра. В некоторых вариантах осуществления контроллер 32 выполнен с возможностью определения траектории занятия полосы посредством моделирования движения сельскохозяйственного транспортного средства с использованием алгоритма направления (например, включающего направление, навигацию и алгоритм (алгоритмы) управления, числовой интегратор и т.д.), а контроллер 32 выполнен с возможностью управления сельскохозяйственным транспортным средством с использованием алгоритма направления. Поскольку для моделирования движения сельскохозяйственного транспортного средства и для управления движением сельскохозяйственного транспортного средства используют один и тот же алгоритм направления, точность графического отображения траектории занятия полосы может быть увеличена по сравнению с использованием отдельных алгоритмов направления для моделирования и управления. В некоторых вариантах осуществления контроллер 32 также выполнен с возможностью определения траектории сельскохозяйственного инструмента, связанного с сельскохозяйственным транспортным средством, по меньшей мере частично на основе траектории занятия полосы, и контроллер 32 выполнен с возможностью вывода на дисплей 52 сигнала, указывающего команды представления графического отображения траектории сельскохозяйственного инструмента. Отображение траектории сельскохозяйственного инструмента может позволить оператору выбирать значение (значения) определенного параметра (параметров), которые устанавливают траекторию занятия полосы, которая быстро и точно располагает сельскохозяйственный инструмент на направляющей полосе и выравнивает сельскохозяйственный инструмент с направляющей полосой, тем самым повышая эффективность процесса занятия полосы.
В проиллюстрированном варианте осуществления система 22 управления содержит средства 54 ручного управления, выполненные с возможностью позволять оператору управлять сельскохозяйственным транспортным средством во время отключения автоматического управления. Средства 54 ручного управления помимо других средств управления могут содержать средство ручного управления направлением движения, средство ручного управления трансмиссией, средство ручного управления торможением или их комбинацию. В проиллюстрированном варианте осуществления средства 54 ручного управления связаны с возможностью передачи данных с контроллером 32. Контроллер 32 выполнен с возможностью отключения автоматического управления сельскохозяйственным транспортным средством после получения сигнала, указывающего на ручное управление сельскохозяйственным транспортным средством. Соответственно, если оператор вручную управляет сельскохозяйственным транспортным средством, завершается процесс автоматического занятия полосы или следования по полосе, что позволяет оператору восстановить управление сельскохозяйственным транспортным средством.
В проиллюстрированном варианте осуществления система 22 управления содержит приемопередатчик 56, связанный с возможностью передачи данных с контроллером 32. В некоторых вариантах осуществления приемопередатчик 56 выполнен с возможностью установления канала связи с соответствующим приемопередатчиком базовой станции, тем самым облегчая связь между базовой станцией и системой управления сельскохозяйственным транспортным средством. Например, базовая станция может содержать пользовательский интерфейс, который позволяет удаленному оператору подавать команды в систему управления (например, команды запуска автоматического управления сельскохозяйственным транспортным средством, команды направления сельскохозяйственного транспортного средства по траектории и т.д.). Пользовательский интерфейс также может позволить удаленному оператору предоставлять данные в систему управления (например, параметр (параметры) для установления траектории занятия полосы, данные, связанные с состоянием поля, данные, связанные с направляющей полосой и т.д.). Приемопередатчик 56 может работать в любом подходящем диапазоне частот в пределах электромагнитного спектра. Например, в некоторых вариантах осуществления приемопередатчик 56 может транслировать и принимать радиоволны в диапазоне частот от приблизительно 1 ГГц до приблизительно 10 ГГц. Кроме того, приемопередатчик 56 может использовать любой подходящий протокол связи, такой как стандартный протокол (например, Wi-Fi, Bluetooth и т.д.) или собственный протокол.
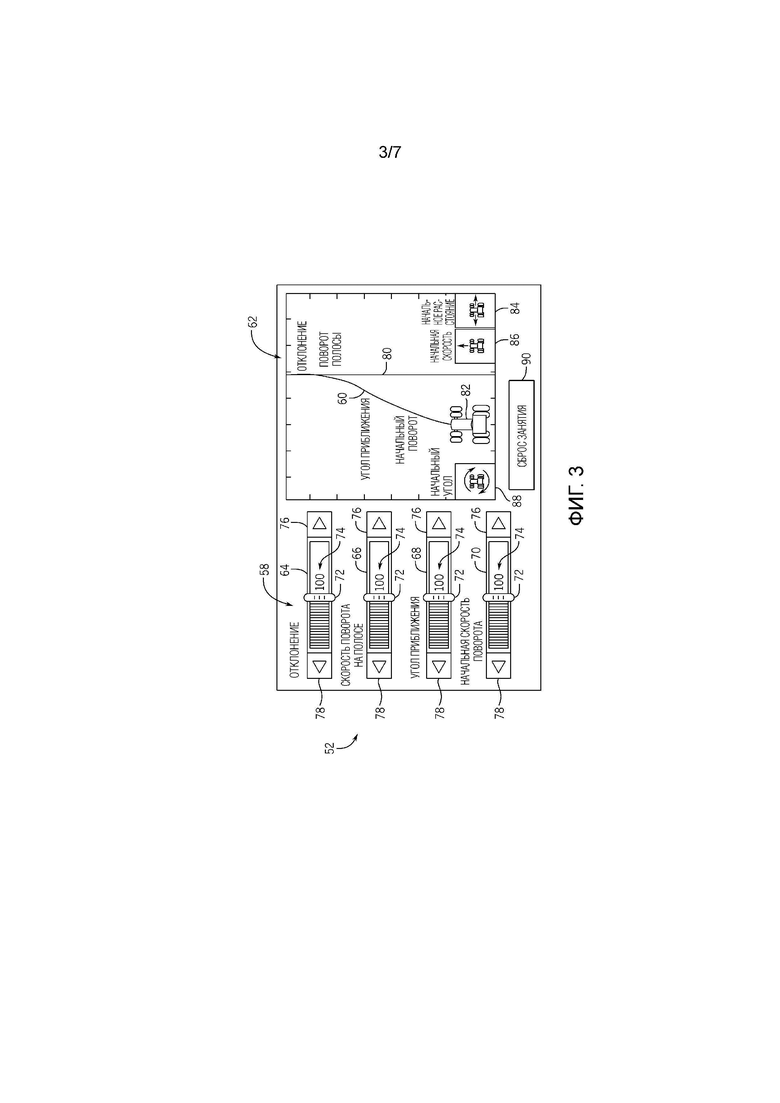
На ФИГ. 3 показана схема варианта осуществления дисплея 52, который можно использовать в пользовательском интерфейсе системы управления ФИГ. 2. В проиллюстрированном варианте осуществления дисплей 52 выполнен с возможностью представления визуального отображения значений параметров занятия полосы в пределах секции 58 параметров занятия полосы и представления графического отображения траектории 60 занятия полосы в пределах секции 62 визуализации траектории дисплея 52. Хотя в проиллюстрированном варианте осуществления секция 58 параметров занятия полосы находится слева от секции 62 визуализации траектории, следует понимать, что в альтернативных вариантах осуществления секция 58 параметров занятия полосы и/или секция 62 визуализации траектории могут быть на дисплее 52 в любом подходящем месте. В проиллюстрированном варианте осуществления дисплей 52 представляет собой сенсорный дисплей. Соответственно, значения параметров занятия полосы можно регулировать посредством взаимодействия с дисплеем 52. Однако в альтернативных вариантах осуществления пользовательский интерфейс может содержать другие средства управления (например, переключатели, кнопки, рукоятки и т.д.), выполненные таким образом, чтобы позволять оператору регулировать значения параметров занятия полосы.
В проиллюстрированном варианте осуществления секция 58 параметров занятия полосы содержит средство 64 управления регулированием отклонений, средство 66 управления скоростью поворота на полосе, средство 68 управления углом приближения и средство 70 управления начальной скоростью поворота. Как показано, каждое средство управления содержит виртуальный ползунок 72, выполненный с возможностью регулирования значения соответствующего параметра, и каждое средство управления содержит числовое представление 74 значения соответствующего параметра. Чтобы отрегулировать значение каждого параметра, соответствующий ползунок 72 можно перемещать по траектории ползунка. По мере продвижения ползунка числовое представление 74 соответствующего параметра изменяется в зависимости от положения ползунка 72 на траектории ползунка. Каждый ползунок 72 можно перемещать путем прямого взаимодействия или траекторией выбора стрелки 76 увеличения значения или стрелки 78 уменьшения значения. Хотя в проиллюстрированном варианте осуществления каждое средство управления содержит ползунок и числовое представление значения параметра, следует понимать, что в альтернативных вариантах осуществления может отображаться другое средство (средства) управления и/или средство (средства) представления значения параметра. Например, в некоторых вариантах осуществления каждое средство управления может содержать виртуальную рукоятку, виртуальную шкалу, поле, в котором число помимо других способов ввода можно вводить с помощью виртуальной клавиатуры или их комбинации. Кроме того, в некоторых вариантах осуществления каждое средство управления может содержать графическое отображение (например, график, шкалу и т.д.) значения соответствующего параметра. Кроме того, в некоторых вариантах осуществления средство ввода/управления регулированием параметров может быть расположено отдаленно от визуального представления соответствующего параметра.
В проиллюстрированном варианте осуществления секция 62 визуализации траектории дисплея 52 содержит графическое отображение траектории 60 занятия полосы и графическое отображение направляющей полосы 80. Секция 62 визуализации траектории также содержит графическое отображение сельскохозяйственного транспортного средства 82. Как показано, графическое отображение сельскохозяйственного транспортного средства 82 расположено отдаленно от графического отображения направляющей полосы 80, что указывает на то, что сельскохозяйственное транспортное средство расположено отдаленно от направляющей полосы. В некоторых вариантах осуществления расстояние между сельскохозяйственным транспортным средством и направляющей полосой можно вводить вручную (например, с помощью виртуальной цифровой клавиатуры) посредством нажатия виртуальной кнопки 84 «начальное расстояние». Кроме того, начальную скорость сельскохозяйственного транспортного средства (например, скорость сельскохозяйственного транспортного средства до начала процесса занятия полосы) можно вводить вручную (например, с помощью виртуальной цифровой клавиатуры) посредством нажатия виртуальной кнопки 86 «начальная скорость». Кроме того, угол между начальной траекторией сельскохозяйственного транспортного средства (например, траекторией сельскохозяйственного транспортного средства до начала процесса занятия полосы) и направляющей полосой можно вводить вручную (например, с помощью виртуальной цифровой клавиатуры) посредством нажатия виртуальной кнопки 88 «начальный угол». Поскольку значения можно вводить вручную, оператор может вводить текущие значения, ожидаемые значения, тестовые/иллюстративные значения или их комбинацию. Кроме того, хотя в проиллюстрированном варианте осуществления виртуальные кнопки расположены в нижней части секции 62 визуализации траектории дисплея 52, следует понимать, что в альтернативных вариантах осуществления виртуальные кнопки могут быть расположены в любой другой подходящей части дисплея.
В других вариантах осуществления расстояние между сельскохозяйственным транспортным средством и направляющей полосой, начальную скорость сельскохозяйственного транспортного средства (например, скорость сельскохозяйственного транспортного средства до начала процесса занятия полосы), угол между начальной траекторией сельскохозяйственного транспортного средства (например, траекторией сельскохозяйственного транспортного средства до начала процесса занятия полосы) и направляющей полосой или их комбинацию может определять контроллер (например, на основе входных данных от устройства определения пространственного положения и/или датчика ориентации). В таких вариантах осуществления виртуальные кнопки можно исключить, или виртуальные кнопки могут позволять оператору вручную корректировать значения, определенные контроллером.
Хотя в проиллюстрированный вариант осуществления включены виртуальные кнопки для «начального расстояния», «начальной скорости» и «начального угла», следует понимать, что в альтернативных вариантах осуществления дисплей может представлять собой подмножество виртуальных кнопок и/или другие/дополнительные виртуальные кнопки. Например, в некоторых вариантах осуществления дисплей может предоставлять кнопку «начальная кривизна», которая позволяет оператору вводить начальный радиус поворота сельскохозяйственного транспортного средства. Дополнительно или альтернативно, контроллер может быть выполнен с возможностью автоматического определения других и/или дополнительных начальных параметров, таких как начальный радиус поворота сельскохозяйственного транспортного средства. После ручного ввода или определения значения (значений) начального параметра (параметров) (например, с помощью виртуальных кнопок) контроллер может посылать на дисплей команды расположения графического отображения сельскохозяйственного транспортного средства 82 в соответствующем месте и ориентации в пределах секции 62 визуализации траектории дисплея 52.
В проиллюстрированном варианте осуществления контроллер определяет траекторию занятия полосы по меньшей мере частично на основе начального параметра (параметров), и параметр (параметры) траектории занятия полосы вводят с помощью средств управления в секции 58 параметров занятия полосы дисплея 52. Контроллер затем выводит на дисплей сигнал, указывающий команды, чтобы представить траекторию занятия полосы, и дисплей 52 представляет графическое отображение траектории 60 занятия полосы в секции 62 визуализации траектории дисплея 52. Траектория занятия полосы включает начальный поворот к углу приближения. В проиллюстрированном варианте осуществления на графическом отображении траектории 60 занятия полосы отмечены «начальный поворот» и «угол приближения». Начальную скорость поворота можно вводить с помощью средства 70 управления начальной скоростью поворота, а угол приближения (например, угол между начальной траекторией сельскохозяйственного транспортного средства и траекторией в сторону направляющей полосы) можно вводить посредством управления 68 углом приближения. Траектория занятия полосы также включает поворот полосы и отклонение. В проиллюстрированном варианте осуществления «поворот полосы» и «отклонение» отмечены на графическом отображении траектории 60 занятия полосы. Скорость поворота на полосе можно вводить с помощью средства 66 управления скоростью поворота на полосе, а отклонение (например, расстояние, на которое сельскохозяйственное транспортное средство отклоняется от направляющей полосы перед возвратом на направляющую полосу), можно вводить с помощью средства 64 управления отклонением.
Начальную скорость поворота можно выбирать так, чтобы уменьшить продолжительность, связанную с занятием направляющей полосы, и уменьшить боковую нагрузку на сельскохозяйственное транспортное средство. Например, более высокая начальная скорость поворота может уменьшить продолжительность занятия направляющей полосы и увеличить боковую нагрузку на сельскохозяйственное транспортное средство. Кроме того, более низкая начальная скорость поворота может увеличить продолжительность занятия направляющей полосы и уменьшить боковую нагрузку на сельскохозяйственное транспортное средство. Соответственно, начальную скорость поворота можно выбрать так, чтобы уравновесить продолжительность занятия направляющей полосы с требуемой боковой нагрузкой. Как должно быть понятно, начальная скорость поворота может быть ограничена возможностями сельскохозяйственного транспортного средства/инструмента (например, максимальным углом поворота колес/гусениц, конфигурацией инструмента и/или сцепного устройства и т.д.). В некоторых вариантах осуществления ввод начальной скорости поворота с помощью средства 70 управления начальной скоростью поворота соответствует максимальной скорости поворота сельскохозяйственного транспортного средства во время начального поворота. Кроме того, в некоторых вариантах осуществления средство 70 управления начальной скоростью поворота может позволить оператору выбирать начальную скорость поворота, например, от приблизительно 1 до приблизительно 10 градусов в секунду, от приблизительно 1 до приблизительно 7 градусов в секунду или от приблизительно 1 до приблизительно 5 градусов в секунду.
Угол приближения можно выбрать так, чтобы уменьшить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой, и обеспечить плавный переход между сегментами траектории занятия полосы. Например, более крутой угол приближения может уменьшить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой, и увеличить угол поворота на полосе. Кроме того, меньший угол приближения может увеличить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой, и уменьшить угол поворота на полосе. Соответственно, угол приближения можно выбрать так, чтобы уравновесить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой с углом поворота на полосе. Кроме того, когда сельскохозяйственное транспортное средство движется с более высокой скоростью, оператор может выбрать меньший угол приближения для уменьшения боковой нагрузки на сельскохозяйственное транспортное средство на начальном повороте и при повороте на полосе (например, из-за увеличенного радиуса кривизны при поворотах). Кроме того, когда сельскохозяйственное транспортное средство движется с меньшей скоростью, оператор может выбрать более крутой угол приближения, чтобы уменьшить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой. В некоторых вариантах осуществления средство 68 управления углом приближения может позволить оператору выбирать угол приближения от приблизительно 5 до приблизительно 120 градусов, от приблизительно 10 до приблизительно 100 градусов, или от приблизительно 20 до приблизительно 90 градусов, например.
Скорость поворота на полосе можно выбирать так, чтобы уменьшить продолжительность, связанную с занятием направляющей полосы, и уменьшить боковую нагрузку на сельскохозяйственное транспортное средство. Например, более высокая скорость поворота на полосе может уменьшить продолжительность занятия направляющей полосы и увеличить боковую нагрузку на сельскохозяйственное транспортное средство. Кроме того, более низкая скорость поворота на полосе может увеличить продолжительность занятия направляющей полосы и уменьшить боковую нагрузку на сельскохозяйственное транспортное средство. Соответственно, скорость поворота на полосе можно выбрать так, чтобы уравновесить продолжительность занятия направляющей полосы с требуемой боковой нагрузкой. Как должно быть понятно, скорость поворота на полосе может быть ограничена возможностями сельскохозяйственного транспортного средства/инструмента (например, максимальным углом поворота колес/гусениц, конфигурацией инструмента и/или сцепного устройства и т.д.). В некоторых вариантах осуществления ввод скорости поворота на полосе с помощью средства 66 управления скоростью поворота на полосе соответствует максимальной скорости поворота сельскохозяйственного транспортного средства при повороте на полосе. Кроме того, в некоторых вариантах осуществления средство 66 управления скоростью поворота на полосе может позволить оператору выбирать скорость поворота на полосе, например, от приблизительно 1 до приблизительно 10 градусов в секунду, от приблизительно 1 до приблизительно 7 градусов в секунду или от приблизительно 1 до приблизительно 5 градусов в секунду.
В некоторых вариантах осуществления контроллер может быть выполнен с возможностью определения ожидаемой максимальной боковой нагрузки во время начального поворота и/или во время поворота на полосе. В таких вариантах осуществления контроллер может быть выполнен с возможностью вывода на дисплей сигнала, указывающего команды предоставления визуального отображения максимальной боковой нагрузки (например, посредством числового значения, измерительного прибора и т.д.). В результате можно визуализировать результат регулирования начальной скорости поворота и/или скорости поворота на полосе.
Как подробно описано ниже, отклонение можно выбрать так, чтобы уменьшить продолжительность, связанную с занятием направляющей полосы сельскохозяйственным инструментом, соединенным с сельскохозяйственным транспортным средством. Например, можно выбрать меньшее отклонение, когда сельскохозяйственное транспортное средство не тащит сельскохозяйственный инструмент или пока сельскохозяйственное транспортное средство тащит меньший/более маневренный сельскохозяйственный инструмент. Кроме того, можно выбрать большее отклонение, когда сельскохозяйственное транспортное средство тащит более крупный/менее маневренный сельскохозяйственный инструмент. В некоторых вариантах осуществления ввод отклонения с помощью средства 64 управления отклонением соответствует максимальному расстоянию, на которое сельскохозяйственное транспортное средство отклоняется от направляющей полосы перед возвратом на направляющую полосу. Кроме того, в некоторых вариантах осуществления средство 64 управления отклонением может позволить оператору выбирать отклонение, например, от приблизительно 0 до приблизительно 50 метров, от приблизительно 0 до приблизительно 40 метров или от приблизительно 0 до приблизительно 30 метров.
В проиллюстрированном варианте осуществления дисплей 52 содержит виртуальную кнопку 90 «сброс занятия». Нажатие виртуальной кнопки «сброс занятия» сбрасывает отклонение, скорость поворота на полосе, угол приближения и начальную скорость поворота до значений по умолчанию (например, соответствующих соответствующим ползункам, расположенным в центре хода ползунка). После сброса занятия оператор может отрегулировать средства управления, чтобы достичь требуемой траектории занятия полосы.
Чтобы установить требуемую траекторию занятия полосы, оператор может отрегулировать средство 64 управления отклонением, средство 66 управления скоростью поворота на полосе, средство 68 управления углом приближения, средство 70 управления начальной скоростью поворота или их комбинацию. Когда оператор регулирует средства управления, графическое отображение траектории 60 занятия полосы автоматически изменяется на основе обновленного параметра (параметров). После того, как оператор находит приемлемую траекторию занятия полосы, оператор может подключить автоматическое направление (например, посредством пользовательского интерфейса), тем самым отправляя контроллеру сигнал, указывающий на принятие значения (значений) параметра (параметров) занятия полосы. Контроллер затем управляет сельскохозяйственным транспортным средством по меньшей мере частично на основе параметра (параметров) занятия полосы, тем самым направляя сельскохозяйственное транспортное средство вдоль требуемой траектории занятия полосы.
Графическое отображение траектории 60 занятия полосы соответствует траектории занятия полосы, определенной контроллером. В некоторых вариантах осуществления контроллер выполнен с возможностью определения траектории занятия полосы, моделируя движение сельскохозяйственного транспортного средства с использованием алгоритма направления (например, включая направление, навигацию и алгоритм (алгоритмы) управления, числовой интегратор и т.д.). Кроме того, контроллер выполнен с возможностью управления сельскохозяйственным транспортным средством с использованием алгоритма направления. Поскольку один и тот же алгоритм направления используется для моделирования движения сельскохозяйственного транспортного средства и для управления движением сельскохозяйственного транспортного средства, точность графического отображения траектории занятия полосы может быть увеличена по сравнению с использованием отдельных алгоритмов направления для моделирования и управления.
Хотя в показанном варианте осуществления на дисплее 52 представлено средство 64 управления отклонением, средство 66 управления скоростью поворота на полосе, средство 68 управления углом приближения и средство 70 управления начальной скоростью поворота, следует понимать, что в альтернативных вариантах осуществления дисплей может представлять подмножество средств управления (например, только одно средство управления, только два средства управления или только три средства управления). В других вариантах осуществления дисплей может представлять другие и/или дополнительные средства управления, помимо других средств управления такие как длина траектории занятия полосы и/или угловое ускорение на одном или нескольких поворотах. В то время как контроллер определяет траекторию занятия полосы и управляет сельскохозяйственным транспортным средством (например, направляет сельскохозяйственное транспортное средство по траектории занятия полосы) по меньшей мере частично на основе начальной скорости поворота, угла приближения, скорости поворота на полосе и отклонения, следует понимать, что в некоторых вариантах осуществления контроллер может определять траекторию занятия полосы и управлять сельскохозяйственным транспортным средством по меньшей мере частично на основе подмножества этих параметров и/или другого параметра (параметров) занятия полосы. Например, в некоторых вариантах осуществления контроллер может определять траекторию занятия полосы и управлять сельскохозяйственным транспортным средством по меньшей мере частично на основе одного или нескольких отклонений, скорости поворота на полосе, угла приближения, начальной скорости поворота и другого параметра (параметров) занятия полосы.
В некоторых вариантах осуществления контроллер может определять траекторию занятия полосы и управлять сельскохозяйственным транспортным средством по меньшей мере частично на основе возможностей и/или размеров сельскохозяйственного транспортного средства и/или сельскохозяйственного инструмента. Например, траекторию занятия полосы можно определять, и сельскохозяйственным транспортным средством можно управлять по меньшей мере частично на основе размеров сельскохозяйственного транспортного средства, размеров сельскохозяйственного инструмента, положения и типа колес/гусениц на сельскохозяйственном инструменте (например, самоустанавливающихся колес/гусениц, не самоустанавливающихся колес/гусениц, управляемых колес/гусениц и т.д.), типа/конфигурации сцепного устройства, соединяющего сельскохозяйственный инструмент с сельскохозяйственным транспортным средством, максимальной угловой скорости поворота рулевого колеса сельскохозяйственного транспортного средства, минимального радиуса поворота сельскохозяйственного транспортного средства или их комбинации, помимо другого параметра (параметров) транспортного средства/инструмента. Кроме того, контроллер может определять траекторию занятия полосы и управлять сельскохозяйственным транспортным средством по меньшей мере частично на основе полевого состояния (состояний), погодного условия (условий), топографии поля или их комбинации, помимо другого внешнего параметра (параметров).
Хотя трактор двигается по траектории занятия полосы к направляющей полосе в прямом направлении, следует понимать, что сельскохозяйственное транспортное средство также может двигаться по траектории занятия полосы к направляющей полосе в обратном направлении. Например, контроллер может определять траекторию занятия полосы, которая продолжается от начального положения сельскохозяйственного транспортного средства назад к направляющей полосе, и контроллер может отправить сельскохозяйственному транспортному средству команду передвигаться вдоль обратной траектории занятия полосы к направляющей полосе. После достижения направляющей полосы сельскохозяйственное транспортное средство может продолжать движение в обратном направлении или двигаться вдоль направляющей полосы в прямом направлении. В некоторых вариантах осуществления пользовательский интерфейс может содержать средство управления, и/или дисплей может содержать виртуальное средство управления, которое позволяет оператору выбирать, будет ли контроллер определять траекторию занятия полосы в прямом или обратном направлении и направлять движение сельскохозяйственного транспортного средства в прямом или обратном направлении к направляющей полосе.
В некоторых вариантах осуществления дисплей может содержать виртуальное средство управления «принятием параметров» (например, виртуальную кнопку и т.д.), и/или пользовательский интерфейс может содержать средство управления «принятием параметров» (например, кнопку и т.д.). В таких вариантах осуществления приведение в действие средства управления/виртуального управления заставляет пользовательский интерфейс подавать контроллеру сигнал, указывающий на принятие параметров занятия полосы. После подключения автоматического направления контроллер управляет сельскохозяйственным транспортным средством таким образом, чтобы сельскохозяйственное транспортное средство двигалось по траектории, установленной по принятым параметрам. В некоторых вариантах осуществления при включенном автоматическом направлении приведение в действие средства управления/виртуального управления «принятием параметров» заставляет пользовательский интерфейс подавать контроллеру сигнал, указывающий команды обновления параметра (параметров) занятия полосы, так чтобы сельскохозяйственное транспортное средство направлялось вдоль обновленной траектории занятия полосы, которая основана на обновленном параметре (параметрах). Кроме того, хотя графическое отображение траектории 60 занятия полосы автоматически изменяется в ответ на приведение в действие средства управления параметром (параметрами) занятия полосы, следует понимать, что в некоторых вариантах осуществления графическое отображение траектории занятия полосы может не обновляться до тех пор, пока пользователь не нажмет кнопку «обновить» на пользовательском интерфейсе или виртуальную кнопку «обновить» на дисплее.
В некоторых вариантах осуществления контроллер может быть выполнен с возможностью подачи дисплею команды представления нескольких графических представлений траекторий занятия полосы. Например, контроллер может подавать дисплею команду представления графического отображения первой траектории занятия полосы на основе значения (значений) по умолчанию параметра (параметров) и графического отображения второй траектории занятия полосы на основе текущего значения (значений) параметра (параметров). Отображение нескольких графических представлений траекторий занятия полосы может позволить оператору сравнить несколько траекторий занятия полосы, чтобы облегчить определение требуемого значения (значений) параметра (параметров).
В некоторых вариантах осуществления контроллер может позволить оператору сохранять значение (значения) параметра, связанного с путем занятия полосы. Например, если оператор регулирует значение (значения) параметра (параметров) и устанавливает требуемую траекторию занятия полосы для определенного сельскохозяйственного транспортного средства (например, сеялки, уборочной машины, комбайна и т.д.) или для определенной комбинации сельскохозяйственного транспортного средства/сельскохозяйственного инструмента (например, трактора и сеялки, трактора и инструмента для обработки почвы и т.д.) оператор может сохранить значение (значения) параметра (параметров) (например, нажав кнопку «сохранить параметр (параметры)» на пользовательском интерфейсе или виртуальную кнопку «сохранить параметр (параметры)» на дисплее). В некоторых вариантах осуществления пользовательский интерфейс может позволять оператору связывать сохраненное значение (значения) параметра с сельскохозяйственным транспортным средством или комбинацией сельскохозяйственного транспортного средства/сельскохозяйственного инструмента. Соответственно, во время последующего процесса занятия полосы оператор может загружать сохраненное значение (значения) параметра для сельскохозяйственного транспортного средства или для комбинации сельскохозяйственного транспортного средства/сельскохозяйственного инструмента (например, посредством нажатия кнопки «загрузить параметр (параметры)» на пользовательском интерфейсе или виртуальной кнопки «загрузить параметр (параметры)» на дисплее), тем самым уменьшая продолжительность, связанную с установлением требуемой траектории занятия полосы.
В некоторых вариантах осуществления контроллер может быть выполнен с возможностью автоматического определения значения (значений) параметра (параметров) занятия полосы по меньшей мере частично на основе начального расстояния, начальной скорости, начального угла или их комбинации, помимо других параметров (например, состояния (состояний) поля, погодного условия (условий), топографии поля и т.д.). В качестве примера начальную скорость поворота, угол приближения, скорость поворота на полосе или их комбинацию можно определить по меньшей мере частично на основе начальной скорости сельскохозяйственного инструмента. Например, когда начальная скорость сельскохозяйственного транспортного средства быстрее, контроллер может выбрать меньший угол приближения и/или более низкие скорости поворота, чтобы уменьшить боковую нагрузку на сельскохозяйственное транспортное средство на начальном повороте и при повороте на полосе. Кроме того, когда начальная скорость сельскохозяйственного транспортного средства медленнее, контроллер может выбрать более крутой угол приближения и/или более высокие скорости поворота, чтобы уменьшить продолжительность, связанную с занятием направляющей полосы. Контроллер также может определять и/или принимать входные данные, указывающие возможности и/или размеры сельскохозяйственного транспортного средства (например, размеры сельскохозяйственного транспортного средства, максимальную скорость поворота сельскохозяйственного транспортного средства, минимальный радиус поворота сельскохозяйственного транспортного средства и т.д.) и/или сельскохозяйственного инструмента (например, размеры сельскохозяйственного инструмента, положение и/или тип колес/гусениц на сельскохозяйственном инструменте, тип/состояние сцепного устройства, соединяющего сельскохозяйственный инструмент с сельскохозяйственным транспортным средством и т.д.) и определить значение (значения) параметра занятия полосы по меньшей мере частично на основе входных данных. В качестве примера отклонение можно определить по меньшей мере частично на основе типа/конфигурации сельскохозяйственного инструмента. Например, контроллер может установить меньшее отклонение, когда сельскохозяйственное транспортное средство не тащит сельскохозяйственный инструмент или когда сельскохозяйственное транспортное средство тащит меньший или более маневренный сельскохозяйственный инструмент. Кроме того, контроллер может установить большее отклонение, когда сельскохозяйственное транспортное средство тащит более крупный/менее маневренный сельскохозяйственный инструмент.
Кроме того, пользовательский интерфейс может содержать «автоматическое создание траектории занятия полосы» (например, кнопку и т.д.), и/или дисплей может содержать виртуальное средство управления «автоматическим созданием траектории занятия полосы» (например, виртуальную кнопку и т.д.). Приведение в действие средства управления/виртуального управления может подавать контроллеру команду автоматического определения значения (значений) параметра занятия полосы, чтобы изменить значение (значения) параметра, представленного на дисплее, и представить графическое отображение траектории занятия полосы на дисплее по меньшей мере частично на основе определенного значения (значений) параметра. После определения значения (значений) параметра занятия полосы оператор может принять значение (значения) или вручную отрегулировать определенное значение (значения), чтобы установить требуемую траекторию занятия полосы. В некоторых вариантах осуществления (например, в вариантах осуществления, в которых контроллер не получает сигнал, указывающий на наличие сельскохозяйственного инструмента), пользовательский интерфейс может содержать первое средство управления/виртуального управления для подачи контроллеру команды автоматического определения значения (значений) параметра занятия полосы только для сельскохозяйственного транспортного средства, а также второе средство управления/виртуального управления для подачи контроллеру команды автоматического определения значения (значений) параметра занятия полосы для комбинации сельскохозяйственного транспортного средства/сельскохозяйственного инструмента.
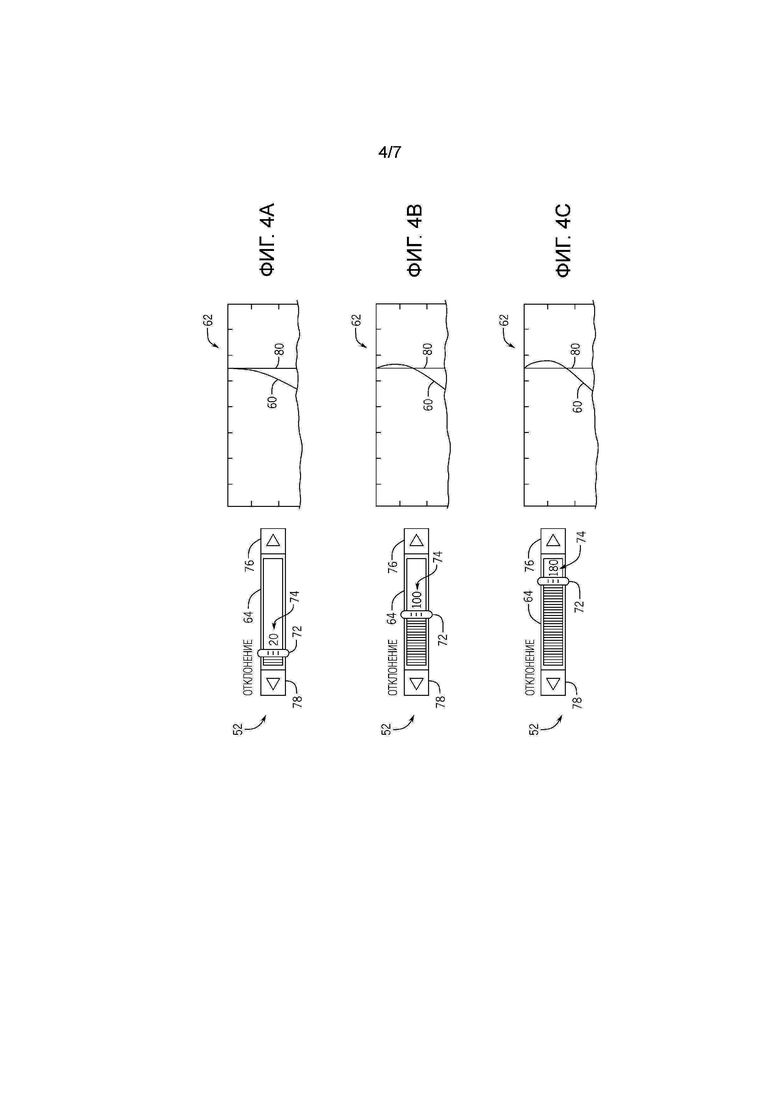
На ФИГ. 4A-4C показаны схемы части дисплея 52 ФИГ. 3, где каждая схема показывает иное отклонение. Как обсуждалось ранее, отклонение можно выбрать так, чтобы уменьшить продолжительность, связанную с занятием направляющей полосы сельскохозяйственным инструментом, соединенным с сельскохозяйственным транспортным средством. Например, как показано на ФИГ. 4А, можно выбрать небольшое отклонение, когда сельскохозяйственное транспортное средство не тащит сельскохозяйственный инструмент. Кроме того, как показано на ФИГ. 4B, среднее отклонение можно выбрать, когда сельскохозяйственное транспортное средство тащит меньший или более маневренный сельскохозяйственный инструмент. Кроме того, как показано на ФИГ. 4C, большее отклонение можно выбрать, когда сельскохозяйственное транспортное средство тащит более крупный/менее маневренный сельскохозяйственный инструмент. В некоторых вариантах осуществления входные данные отклонения с помощью средства 64 управления отклонением соответствует максимальному расстоянию, на которое сельскохозяйственное транспортное средство отклоняется от направляющей полосы перед возвратом на направляющую полосу.
На ФИГ. 5 показана схема части дисплея 52 ФИГ. 3, показывающая разные углы приближения к направляющей полосе. Как обсуждалось ранее, угол приближения можно выбрать так, чтобы уменьшить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой и обеспечить плавный переход между сегментами траектории занятия полосы. Например, как представлено первым графическим отображением траектории 92 занятия полосы, большой угол 94 приближения может уменьшить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой, и увеличить угол поворота на полосе. Кроме того, как представлено вторым графическим отображением траектории 96 занятия полосы, средний угол 98 приближения может увеличить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой и уменьшить угол поворота на полосе по сравнению с большим углом 94 приближения. Кроме того, как представлено третьим графическим отображением траектории 100 занятия полосы, малый угол 102 приближения может увеличить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей полосой и уменьшить угол поворота на полосе по сравнению со средним углом 98 приближения и большим углом 94 приближения. Соответственно, угол приближения можно выбрать так, чтобы уравновесить расстояние, проходимое между начальным положением сельскохозяйственного транспортного средства и направляющей стороной с углом поворота на полосе.
На ФИГ. 6 показана схема альтернативного варианта осуществления дисплея 52, который можно использовать в пользовательском интерфейсе системы управления ФИГ. 2. В проиллюстрированном варианте осуществления контроллер выполнен с возможностью определения траектории сельскохозяйственного инструмента, связанного с сельскохозяйственным транспортным средством по меньшей мере частично на основе траектории занятия полосы, и контроллер выполнен с возможностью вывода на дисплей 52 сигнала, указывающего команды представления графического отображения траектории сельскохозяйственного инструмента 104. В некоторых вариантах осуществления контроллер может определять траекторию сельскохозяйственного инструмента по меньшей мере частично на основе помимо других параметров типа сельскохозяйственного инструмента, конфигурации сельскохозяйственного инструмента, размеров сельскохозяйственного инструмента, положения и/или типа колес/гусениц на сельскохозяйственном инструменте (например, самоустанавливающихся колес/гусениц, не самоустанавливающихся колес/гусениц, управляемых колес/гусениц и т.д.), типа/конфигурации сцепного устройства, соединяющего сельскохозяйственный инструмент с сельскохозяйственным транспортным средством или их комбинации. В проиллюстрированном варианте осуществления дисплей 52 предоставляет флажок «оценки траектории инструмента», который контролирует, отображается ли траектория сельскохозяйственного инструмента. В некоторых вариантах осуществления траектория сельскохозяйственного инструмента может отображаться автоматически, если контроллер обнаруживает наличие сельскохозяйственного инструмента, связанного с сельскохозяйственным транспортным средством. В таких вариантах осуществления флажок «оценки траектории инструмента» можно исключить.
На ФИГ. 7 показана блок-схема варианта осуществления способа 108 управления сельскохозяйственным транспортным средством. Способ 108 может храниться в виде команд по меньшей мере на одном энергонезависимом, материальном машиночитаемом носителе, таком как запоминающее устройство, и выполняться процессором, таким как микропроцессор. Во-первых, как представлено блоком 110, значение по меньшей мере одного параметра получают от пользовательского интерфейса. Как обсуждалось ранее, по меньшей мере один параметр помимо других параметров может включать начальную скорость поворота сельскохозяйственного транспортного средства, угол приближения сельскохозяйственного транспортного средства к направляющей полосе, скорость поворота сельскохозяйственного транспортного средства на полосе, отклонение от направляющей полосы или их комбинацию. Далее, как представлено блоком 112, получают начальный угол (например, угол между начальной траекторией сельскохозяйственного транспортного средства и направляющей полосой), начальную скорость (например, начальную скорость сельскохозяйственного транспортного средства), начальное расстояние (например, расстояние между сельскохозяйственным транспортным средством и направляющей полосой) или их комбинацию. Как обсуждалось ранее, начальный угол, начальную скорость, начальное расстояние или их комбинация можно вводить вручную и/или определять с помощью контроллера (например, на основе входных данных от устройства определения пространственного положения и/или датчика ориентации).
Затем траектория сельскохозяйственного транспортного средства к направляющей стороне определяется по меньшей мере частично на основе меньшей мере одного параметра, как представлено блоком 114. Например, контроллер может быть выполнен с возможностью определения траектории занятия полосы путем моделирования передвижения сельскохозяйственного транспортного средства с использованием алгоритма направления (например, включая направление, навигацию и алгоритм (алгоритмы) управления, числовой интегратор и т.д.). Затем дисплей пользовательского интерфейса получает команду представить графическое отображение траектории сельскохозяйственного транспортного средства, как представлено блоком 116. В некоторых вариантах осуществления дисплей пользовательского интерфейса также получает команду представить визуальное отображение значения по меньшей мере одного параметра (например, посредством средства (средств) управления параметрами направляющей полосы), как представлено блоком 118, и/или дисплей пользовательского интерфейса получает команду представить графическое отображение направляющей полосы, как представлено блоком 120. Кроме того, в некоторых вариантах осуществления траектория сельскохозяйственного инструмента, соединенного с сельскохозяйственным транспортным средством, определяется по меньшей мере частично на основе траектории сельскохозяйственного транспортного средства, как представлено блоком 122, и дисплей пользовательского интерфейса получает команду представить графическое отображение траектории сельскохозяйственного инструмента, как представлено блоком 124. После получения от пользовательского интерфейса по меньшей мере сигнала, указывающего на принятие значения по меньшей мере одного параметра, сельскохозяйственное транспортным средством управляют по меньшей мере частично на основе по меньшей мере одного параметра, как представлено блоком 126. Как обсуждалось ранее, сигнал, указывающий на принятие значения по меньшей мере одного параметра, может выводить пользовательский интерфейс после подключения автоматического управления или после приведения в действие средства управления/виртуального управления «принятием параметров».
В качестве примера, чтобы установить требуемую траекторию занятия полосы, оператор может отрегулировать определенное средство (средства) управления пользовательского интерфейса для управления значением (значениями) определенного параметра (параметров) занятия полосы. Когда оператор регулирует средство (средства) управления, графическое отображение траектории занятия полосы может автоматически изменяться на основе обновленного параметра (параметров). Как только оператор обнаружит приемлемую траекторию занятия полосы, оператор может подключить автоматическое управление (например, посредством пользовательского интерфейса), тем самым отправляя контроллеру сигнал, указывающий на принятие значения (значений) параметра (параметров) занятия полосы. Контроллер затем управляет сельскохозяйственным транспортным средством по меньшей мере частично на основе параметра (параметров) занятия полосы, чтобы сельскохозяйственное транспортное средство направлялось вдоль требуемой траектории занятия полосы.
Несмотря на то, что в настоящем документе были проиллюстрированы и описаны только некоторые признаки, специалистам в данной области техники встретится множество модификаций и изменений. Поэтому следует понимать, что приложенная формула изобретения охватывает все те модификации и изменения, которые подпадают под истинный смысл раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ МАСШТАБИРОВАНИЕ РЯДОВ ДВИЖЕНИЯ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2721576C1 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2017 |
|
RU2719047C1 |
| СИСТЕМА И СПОСОБ ОБМЕНА ДАННЫМИ ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2730117C2 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ПОЛОСЫ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И ВНЕДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2728604C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОБУКСОВЫВАНИЕМ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2715865C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ТРАНСПОРТНОГО СРЕДСТВА, ИСПОЛЬЗУЕМОГО С УБОРОЧНОЙ МАШИНОЙ | 2011 |
|
RU2552960C2 |
| ПОЧВООБРАБАТЫВАЮЩИЙ АГРЕГАТ ДЛЯ ОБРАБОТКИ ПОЧВЫ, СИСТЕМА И СПОСОБ ОБРАБОТКИ ПОЧВЫ ТАКИМ ПОЧВООБРАБАТЫВАЮЩИМ АГРЕГАТОМ | 2020 |
|
RU2823622C2 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2019 |
|
RU2804496C1 |
| ДОПОЛНЕНИЕ МЕСТОПОЛОЖЕНИЯ ПО GPS И ВОСПРОИЗВЕДЕНИЕ ПРИ ПЕРЕБОЕ В РАБОТЕ | 2021 |
|
RU2818744C1 |
| СИСТЕМЫ, СПОСОБЫ И/ИЛИ УСТРОЙСТВА ДЛЯ ОБЕСПЕЧЕНИЯ ПОЛЬЗОВАТЕЛЬСКОГО ДИСПЛЕЯ И ИНТЕРФЕЙСА ДЛЯ ИСПОЛЬЗОВАНИЯ С СЕЛЬСКОХОЗЯЙСТВЕННЫМ ОРУДИЕМ | 2017 |
|
RU2730413C1 |
Группа изобретений относится к сельскому хозяйству. Способ управления сельскохозяйственным транспортным средством включает получение процессором от пользовательского интерфейса первого сигнала, указывающего значение по меньшей мере одного параметра занятия полосы, определение процессором траектории сельскохозяйственного транспортного средства в сторону направляющей полосы по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы. Определение траектории сельскохозяйственного транспортного средства включает моделирование передвижения сельскохозяйственного транспортного средства с использованием алгоритма направления. Вывод процессором на дисплей пользовательского интерфейса второго сигнала, указывающего команды предоставления графического отображения траектории сельскохозяйственного транспортного средства. Управление процессором сельскохозяйственным транспортным средством по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы после получения от пользовательского интерфейса по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра занятия полосы. Управление сельскохозяйственным транспортным средством включает управление сельскохозяйственным транспортным средством с использованием алгоритма направления. Система управления сельскохозяйственным транспортным средством содержит пользовательский интерфейс, содержащий дисплей. Пользовательский интерфейс выполнен с возможностью подачи первого сигнала, указывающего значение по меньшей мере одного параметра занятия полосы. Контроллер, связанный с возможностью передачи данных с пользовательским интерфейсом, выполненный с возможностью определения траектории сельскохозяйственного транспортного средства в сторону направляющей полосы по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы. Контроллер выполнен с возможностью определения траектории сельскохозяйственного транспортного средства посредством моделирования передвижения сельскохозяйственного транспортного средства с использованием алгоритма направления. Контроллер выполнен с возможностью выведения на дисплей второго сигнала, указывающего команды представления графического отображения траектории и с возможностью управления сельскохозяйственным транспортным средством по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы после получения от пользовательского интерфейса по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра занятия полосы, а также с возможностью управления сельскохозяйственным транспортным средством с использованием алгоритма направления. Обеспечивается повышение эффективности процесса занятия направляющей полосы. 2 н. и 11 з.п. ф-лы, 9 ил.
1. Способ (108) управления сельскохозяйственным транспортным средством (10), отличающийся тем, что включает:
получение (110) процессором (34) от пользовательского интерфейса (50) первого сигнала, указывающего значение по меньшей мере одного параметра занятия полосы;
определение (114) процессором (34) траектории (18) сельскохозяйственного транспортного средства (10) в сторону направляющей полосы (12) по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы, причем определение траектории (18) сельскохозяйственного транспортного средства (10) включает моделирование передвижения сельскохозяйственного транспортного средства (10) с использованием алгоритма направления;
вывод (116) процессором (34) на дисплей (52) пользовательского интерфейса (50) второго сигнала, указывающего команды предоставления графического отображения траектории сельскохозяйственного транспортного средства (10); и
управление (126) процессором (34) сельскохозяйственным транспортным средством (10) по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы после получения от пользовательского интерфейса (50) по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра занятия полосы, причем управление (126) сельскохозяйственным транспортным средством (10) включает управление сельскохозяйственным транспортным средством (10) с использованием алгоритма направления.
2. Способ (108) по п. 1, в котором по меньшей мере один параметр занятия полосы включает начальную скорость поворота сельскохозяйственного транспортного средства (10), угол (94, 98, 102) приближения сельскохозяйственного транспортного средства (10) к направляющей полосе (12), скорость поворота сельскохозяйственного транспортного средства (10) на полосе, отклонение от направляющей полосы (12) или их комбинацию.
3. Способ (108) по любому из пп. 1, 2, включающий выведение (118) процессором (34) на дисплей (52) пользовательского интерфейса (50) четвертого сигнала, указывающего команды предоставления визуального представления значения по меньшей мере одного параметра (72, 74) занятия полосы.
4. Способ (108) по любому из пп. 1-3, включающий выведение (120) процессором (34) на дисплей (52) пятого сигнала, указывающего команды предоставления графического отображения направляющей полосы (80).
5. Способ (108) по любому из пп. 1-4, включающий:
определение (122) процессором (34) траектории сельскохозяйственного инструмента (20), связанного с сельскохозяйственным транспортным средством (10) по меньшей мере частично на основе траектории (18) сельскохозяйственного транспортного средства (10); и
выведение (124) процессором (34) на дисплей (52) шестого сигнала, указывающего команды предоставления графического отображения траектории сельскохозяйственного инструмента (104).
6. Способ (108) по любому из пп. 1-5, включающий получение (112) процессором (34) от пользовательского интерфейса (50) седьмого сигнала, указывающего начальный угол сельскохозяйственного транспортного средства (10) относительно направляющей полосы (12), начальную скорость сельскохозяйственного транспортного средства (10), начальное расстояние сельскохозяйственного транспортного средства (10) от направляющей полосы (12) или их комбинацию, при этом определение траектории (18) сельскохозяйственного транспорта (10) основано по меньшей мере частично на начальном угле, начальной скорости, начальном расстоянии или их комбинации.
7. Способ (108) по любому из пп. 1-5, включающий определение процессором (34) начального угла сельскохозяйственного транспортного средства (10) относительно направляющей полосы (12), начальной скорости сельскохозяйственного транспортного средства (10), начального расстояния сельскохозяйственного транспортного средства (10) от направляющей полосы (12) или их комбинации, причем определение траектории (18) сельскохозяйственного транспортного средства (10) основано по меньшей мере частично на начальном угле, начальной скорости, начальном расстоянии или их комбинации.
8. Система (22) управления сельскохозяйственным транспортным средством (10), отличающаяся тем, что она содержит:
пользовательский интерфейс (50), содержащий дисплей (52), причем пользовательский интерфейс (50) выполнен с возможностью подачи первого сигнала, указывающего значение по меньшей мере одного параметра занятия полосы; и
контроллер (32), связанный с возможностью передачи данных с пользовательским интерфейсом (50), причем контроллер (32) выполнен с возможностью определения траектории (18) сельскохозяйственного транспортного средства (10) в сторону направляющей полосы (12) по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы, при этом контроллер (32) выполнен с возможностью определения траектории (18) сельскохозяйственного транспортного средства (10) посредством моделирования передвижения сельскохозяйственного транспортного средства (10) с использованием алгоритма направления;
причем контроллер (32) выполнен с возможностью выведения на дисплей (52) второго сигнала, указывающего команды представления графического отображения траектории (60), контроллер (32) выполнен с возможностью управления сельскохозяйственным транспортным средством (10) по меньшей мере частично на основе по меньшей мере одного параметра занятия полосы после получения от пользовательского интерфейса (50) по меньшей мере третьего сигнала, указывающего на принятие значения по меньшей мере одного параметра занятия полосы, и контроллер (32) выполнен с возможностью управления сельскохозяйственным транспортным средством (10) с использованием алгоритма направления.
9. Система управления (22) по п. 8, в которой по меньшей мере один параметр занятия полосы включает начальную скорость поворота сельскохозяйственного транспортного средства (10), угол (94, 98, 102) приближения сельскохозяйственного транспортного средства (10) к направляющей полосе (12), скорость поворота сельскохозяйственного транспортного средства на полосе (10), отклонение от направляющей полосы (12) или их комбинацию.
10. Система (22) управления по любому из пп. 8, 9, в которой контроллер (32) выполнен с возможностью выведения на дисплей (52) четвертого сигнала, указывающего команды предоставления визуального представления значения по меньшей мере одного параметра (72, 74) занятия полосы, и контроллер (32) выполнен с возможностью выведения на дисплей (52) пятого сигнала, указывающего команды предоставления графического отображения направляющей полосы (80) или их комбинацию.
11. Система (22) управления по любому из пп. 8-10, в которой контроллер (32) выполнен с возможностью определения траектории сельскохозяйственного инструмента (20), связанного с сельскохозяйственным транспортным средством (10), по меньшей мере частично на основе траектории (18) сельскохозяйственного транспортного средства (10) и контроллер (32) выполнен с возможностью выведения на дисплей (52) шестого сигнала, указывающего команды предоставления графического отображения траектории сельскохозяйственного инструмента (104).
12. Система (22) управления по любому из пп. 8-11, в которой пользовательский интерфейс (50) выполнен с возможностью выведения седьмого сигнала, указывающего начальный угол сельскохозяйственного транспортного средства (10) относительно направляющей полосы (12), начальную скорость сельскохозяйственного транспортного средства (10), начальное расстояние сельскохозяйственного транспортного средства (10) от направляющей полосы (12) или их комбинацию, и контроллер (32) выполнен с возможностью определения траектории (18) сельскохозяйственного транспортного средства (10) в сторону направляющей полосы (12) по меньшей мере частично на основе начального угла, начальной скорости, начального расстояния или их комбинации.
13. Система (22) управления по любому из пп. 8-11, в которой контроллер (32) выполнен с возможностью определения начального угла сельскохозяйственного транспортного средства (10) относительно направляющей полосы (12), начальной скорости сельскохозяйственного транспортного средства (10), начального расстояния сельскохозяйственного транспортного средства (10) от направляющей полосы (12) или их комбинации и контроллер (32) выполнен с возможностью определения траектории (18) сельскохозяйственного транспортного средства (10) в сторону направляющей полосы (12) по меньшей мере частично на основе начального угла, начальной скорости, начального расстояния или их комбинации.
| US 8332135 B2, 11.12.2012 | |||
| US 2008249692 A1, 09.10.2008 | |||
| US 2008215203 A1, 04.09.2008. |

