Данное изобретение относится к области механизации и к агротехнике, в частности, к посеву, и его объектами являются способ и система контролируемого засева с формированием технологической колеи на сельскохозяйственной делянке.
Во время этапов посева и обработки (например, полива, рыхления, внесения удобрений) сельскохозяйственной делянки трактор и установленные на нем орудия часто проходят по одним и тем же траекториям (колеи или следы прохождения). Следовательно, последние оказываются неиспользуемыми, поскольку укатываются при каждой операции.
Обычно осуществляют формирование технологической колеи на прямых участках внутри делянки, а также прямых участках по краю поля (периферический участок, по меньшей мере частично окружающий основную внутреннюю зону делянки). Формирование технологической колеи заключается в отключении высевающих элементов сеялки, соответствующих колеям колес трактора/орудия, чтобы не тратить зря семена.
Чтобы оптимизировать число траекторий (и, следовательно, ограничить укатывание), земледелец часто выбирает орудия/машины, ширина которых является кратной рабочей ширине других орудий/машин, которые были использованы ранее или будут использованы впоследствии, в частности, рабочей ширине навесной или прицепной сеялки. Следовательно, это сужает его выбор машин, которые он должен приобрести и/или использовать, если он хочет сократить потери, связанные с укатыванием. Например, на выбор машины, применяемой на этапе полива, в частности, ее рабочей ширины напрямую влияет рабочая ширина и размер колеи использовавшейся до этого сеялки и, следовательно, тип технологической колеи, примененной при посеве.
Известны многие способы и системы для создания технологической колеи прямых участков путей, образующих текущие участки расположений посевных рядов. Примеры таких способов и систем раскрыты в следующих документах: WO 2015/028127, EP 2 532 218, ЕР 0 702 888 и ЕР 0 176 023, а также применяются заявителем при технологии, называемой «Section Control».
Наиболее близким аналогом настоящего изобретения является известный из EP 2342963 В1 (опубл. 21.11.2012) способ контролируемого засева сельскохозяйственной делянки при помощи сеющей автономной или полуавтономной машины или сцепки с сеющим агрегатом, имеющим индивидуальные высевающие органы, каждый из которых предназначен и выполнен с возможностью выполнения посевного ряда, причем эта сеющая машина или сцепка выполнена с возможностью селективно и по меньшей мере временно прерывать по меньшей мере один или все посевной(-ые) ряд(-ы) посредством блокировки и/или откидывания соответствующего органа или соответствующих органов, чтобы произвести выполнение технологической колеи на указанной делянке, предотвращая повреждение сельскохозяйственных культур во время запланированного(-ых) прохождения(-ий) по меньшей мере одной машины(-н) или сцепки(-ок), предназначенной(-ых) для осуществления по меньшей мере одной последующей(-их) операции(-ий) на этой делянке, при этом указанный способ включает предварительную разработку виртуального плана делянки с текущими, в основном, прямолинейными участками расположений посевных рядов, предназначенных для выполнения по меньшей мере в основной внутренней области указанной делянки и, возможно, в периферической области края поля, проходящей вдоль или окружающей, в случае необходимости, по меньшей мере частично эту внутреннюю область, определяют на его основе траектории машины или сеющей сцепки, контролируемо управляемой для осуществления контролируемого посева с выполнением технологической колеи для этих текущих участков в зависимости от траекторий ходовых органов машины(-ин) или сцепки(-ок), осуществляющей(-их) последующую(-ие) операцию (-ии) на этих текущих участках.
Вместе с тем, технологическая колея, относящаяся к непрямолинейным траекториям, в настоящее время еще не освоена, в частности, по причине невозможности точно воспроизводить траектории в зависимости от используемого оборудования и от разнообразных условий применения.
По этой причине повороты, развороты и другие маневры (в частности, с непрямолинейными траекториями) обычно проходятся не по технологической полосе, так как их формы и размеры не обязательно являются одинаковыми в зависимости от типа орудия обработки (прицепного/навесного), от рабочей ширины, от маневренности (наличие или отсутствие ведомых или управляемых колесных осей на орудии), от наклона земельного участка, от качества грунта, от метеорологических условий в день производства работ и т.д.).
Кроме того, выполнение точной технологической колеи на этих участках весьма затруднено для водителя, даже если он имеет средства помощи, так же как и следование этой технологической колее во время сельскохозяйственных операций, производимых впоследствии.
Так, системы помощи водителям (обычно называемые «автопилотами») тракторов позволяют легко работать внутри делянки с применением вспомогательных средств (управление скоростью и направлением трактора на прямых или лишь слегка изогнутых участках) и, следовательно, легко формировать технологическую полосу на этом участке. Тем не менее, хотя некоторые автопилоты самостоятельно осуществляют развороты между прямыми участками, точная траектория этих разворотов заранее не известна (поскольку выбирается индивидуально перед каждым разворотом программой помощи водителю). Это же касается и некоторых маневров, таких как заправки, которые автоматизированы еще в меньшей степени, так как существующие системы автопилотирования их не учитывают. Разработка этих программ автопилотирования для включения в них вышеупомянутых специальных маневров может быть трудоемкой и может потребовать от пользователя дополнительного обучения.
Наконец, применение роботизированных машин для посева и/или обработки, рабочая ширина которых часто ограничена, приводит к увеличению числа маневров и к повреждению культур и укатыванию грунта на больших площадях, в частности, на противоположных концах прямых участков посевных рядов, и, следовательно, приводит к бесполезной трате семян.
Основная задача изобретения состоит в разработке способа и системы засева, позволяющих уменьшить бесполезную трату семян, в частности, за пределами прямых участков расположений посевных рядов делянки, ограничивая непродуктивный посев семян, то есть внесение семян, не приводящее к выращиванию растения, урожай которого может быть получен впоследствии.
Для этого объектом изобретения является способ контролируемого засева сельскохозяйственной делянки при помощи сеющей автономной или полуавтономной машины или сцепки с сеющим агрегатом, имеющим индивидуальные высевающие органы, каждый из которых предназначен и выполнен с возможностью выполнения посевного ряда, причем эта сеющая машина или сцепка выполнена с возможностью селективно и по меньшей мере временно прерывать по меньшей мере один или все посевной(-ые) ряд(-ы) посредством блокировки и/или откидывания соответствующего органа или соответствующих органов, чтобы произвести выполнение технологической колеи на указанной делянке, предотвращая повреждение сельскохозяйственных культур во время запланированного(-ых) прохождения(-ий) по меньшей мере одной машины(-н) или сцепки(-ок), предназначенной(-ых) для осуществления по меньшей мере одной последующей(-их) операции(-ий) на этой делянке, при этом указанный способ включает предварительную разработку виртуального плана делянки с текущими, в основном, прямолинейными участками расположений посевных рядов, предназначенных для выполнения по меньшей мере в основной внутренней области указанной делянки и, возможно, в периферической области края поля, проходящей вдоль или окружающей, в случае необходимости, по меньшей мере частично эту внутреннюю область, определяют на его основе траектории машины или сеющей сцепки, контролируемо управляемой для осуществления контролируемого посева с выполнением технологической колеи для этих текущих участков в зависимости от траекторий ходовых органов машины(-ин) или сцепки(-ок), осуществляющей(-их) последующую(-ие) операцию (-ии) на этих текущих участках, причем предоставляют и учитывают конкретные траектории машины(-ин) или сцепки(-ок), осуществляющей(-их) вышеупомянутую(-ые) последующую(-ие) операцию(-ии) по меньшей мере во время прохождения поворотов, во время разворотов или между текущими участками, и управляют машиной или сеющей сцепкой с целью осуществления контролируемого посева с выполнением технологической колеи также во время этих конкретных траекторий.
Предпочтительным является то, что определяют и учитывают также конкретные траектории машины(-ин) или сцепки(-ок), осуществляющей(-их) вышеупомянутую(-ые) последующую(-ие) операцию(-ии), во время маневров, связанных с уклонением от объектов или препятствий, со входами или с выходами из делянки, с операциями пополнения или заправки ресурсами или с прогнозируемыми специфическими операциями, например, в зависимости от природы культивируемых растений на рассматриваемой делянке, от характеристик почвы этой делянки и/или от соответствующего типа машины(-ин) или сцепки(-ок).
Целесообразным является то, что предварительно для прогнозируемых маневров производят моделирование траекторий ходовых средств машин или сцепок, осуществляющих последующую(-ие) операцию(-ии), которая(-ые) могут применяться на рассматриваемой делянке, с учетом возможного фактора ошибки или отклонения, определяемого при помощи измерений во время работы в реальных условиях.
Виртуальный план делянки содержит также разбивку ее площади на рабочие зоны в связи с рекомендациями по посеву, такими как варьирование дозы семян и/или вносимого удобрения, скорость работы, глубина работы, специальная регулировка по меньшей мере одного рабочего параметра машины или сеющей сцепки.
Предпочтительным является то, что контролируемый засев делянки осуществляет роботизируемая машина, работающая автономно или управляемая дистанционно, рабочая ширина которой предпочтительно является целым числом, кратным рабочей ширине машин или сцепок, осуществляющих последующую(-ие) операцию(-ии), которая(-ые) может(-ут) применяться на рассматриваемой делянке, причем они предпочтительно относятся также к типу роботизированной машины, работающей автономно или управляемой дистанционно.
Настоящее изобретение также относится к системе для осуществления способа контролируемого засева, содержащей сеющую автономную или полуавтономную машину или сцепку с сеющим агрегатом, имеющую индивидуальные высевающие органы, каждый из которых предназначен и выполнен с возможностью выполнения посевного ряда, причем эта машина или сцепка выполнена с возможностью селективно или по меньшей мере временно прерывать по меньшей мере один или все посевные ряды посредством блокировки и, возможно, откидывания соответствующего(-их) органа(-ов), отличающаяся тем, что машина или сцепка оснащена средствами управления, включающими в себя компьютерное средство, выполненное с возможностью применять виртуальный план предназначенной для засева делянки и разрабатывать и исполнять протокол перемещения и работы указанной машины или сцепки для осуществления контролируемого посева с селективным выполнением технологической колеи на всей рассматриваемой делянке в зависимости от траекторий ходовых органов машины(-ин) или сцепки(-ок), осуществляющих операцию(-ии), следующую(-ие) за засевом этой делянки.
Предпочтительным является то, что сеющая машина или сцепка является роботизированной машиной, работающей в автономном режиме, в полуавтономном режиме или управляемой дистанционно.
Изобретение будет более понятно из нижеследующего описания, которое относится к нескольким предпочтительным вариантам осуществления, представленным в качестве неограничивающих примеров, со ссылками на прилагаемые схематичные чертежи, на которых:
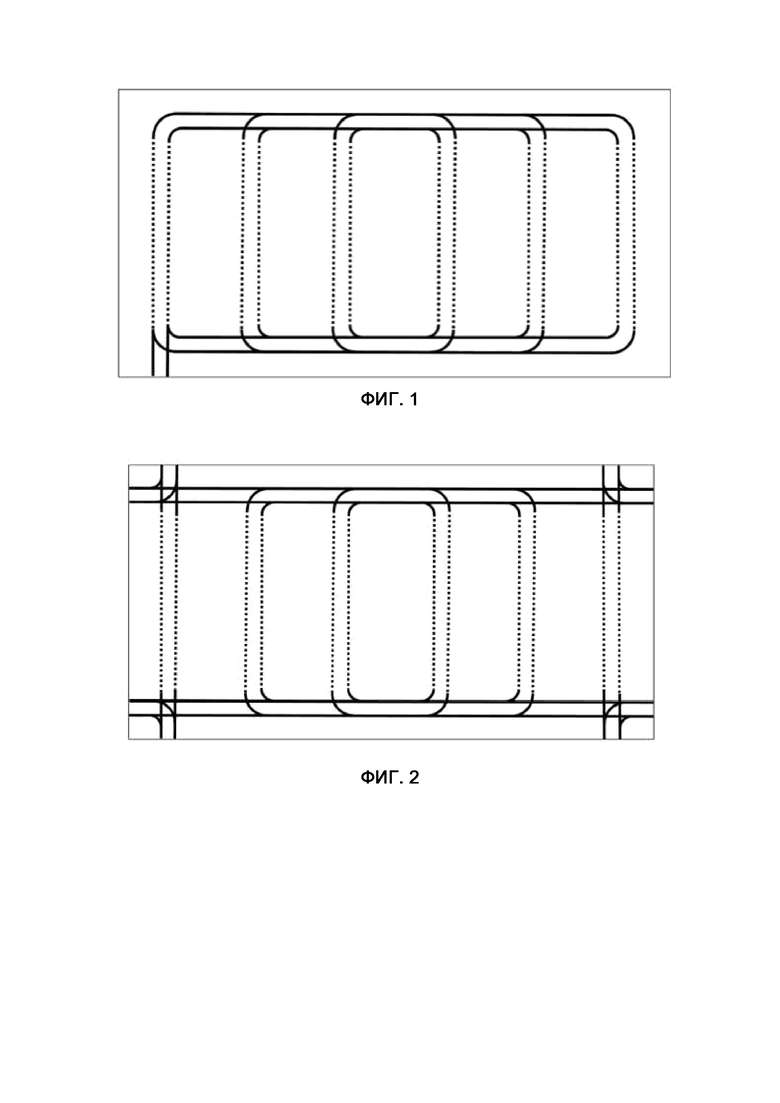
на фиг. 1 приведена схематичная иллюстрация, представляющая следы прохождения примера традиционной технологической колеи на делянке (ограниченная технологическая колея, производимая земледельцами до настоящего времени), причем на этой фигуре участки траектории с технологической колеей показаны пунктирными линиями, а участки без технологической колеи, то есть засеянные и затем укатанные участки показаны сплошными линиями, при этом наружная рамка символизирует контур делянки;
на фиг. 2 показан второй пример делянки, сходной с делянкой, показанной на фиг. 1, обрабатываемой с традиционной технологической колеей, причем эту делянку обрабатывают альтернативно по сравнению с примером на фиг. 1 (рисунок следов прохождения различается, но принцип остается таким же);
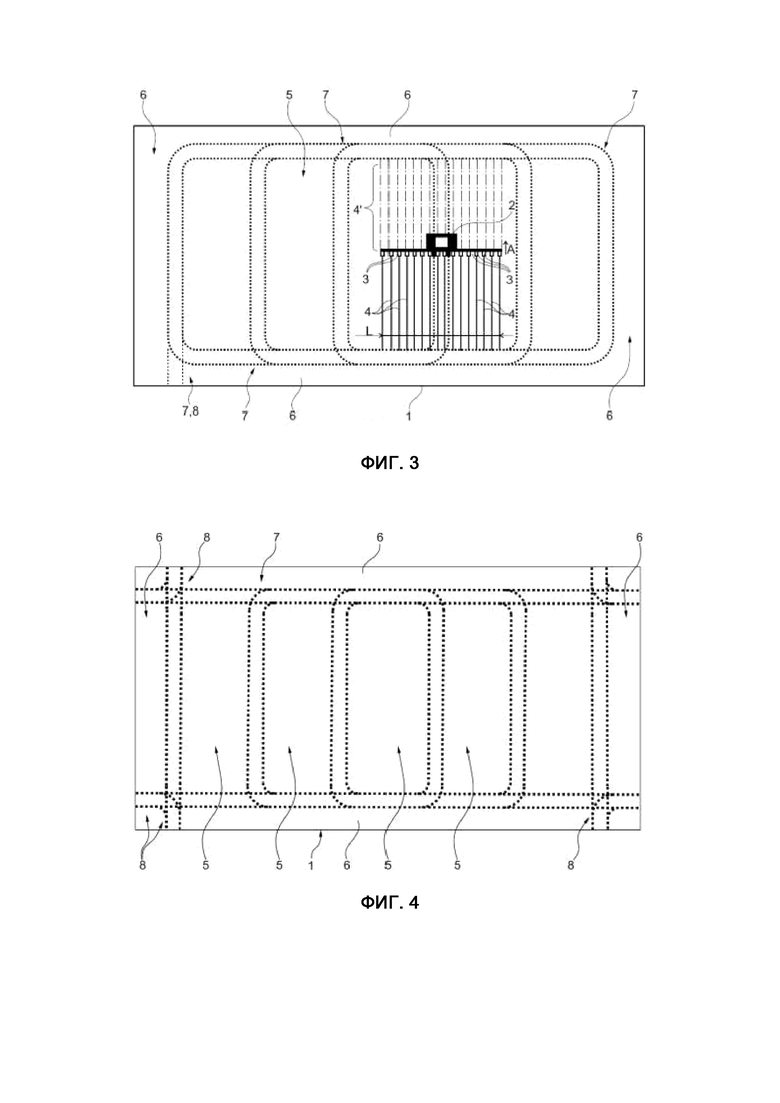
на фиг. 3 показана полная технологическая колея на делянке, показанной на фиг. 1, в соответствии с изобретением, при этом рисунок траекторий идентичен с рисунком, показанным на фиг. 1;
на фиг. 4 показана полная технологическая колея на делянке, показанной на фиг. 2, в соответствии с изобретением, при этом рисунок траекторий идентичен с рисунком, показанным на фиг. 2;
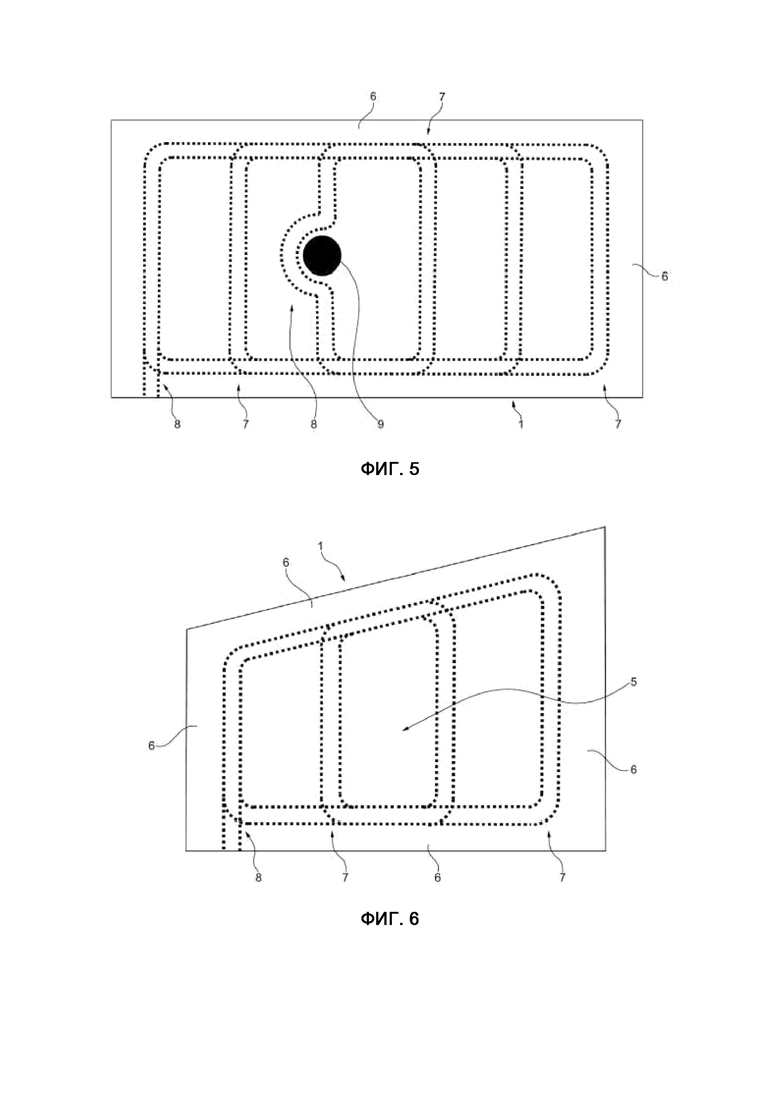
фиг. 5 и фиг. 6 иллюстрируют примеры полной технологической колеи для делянки, на которой присутствует препятствие (фиг. 5), и для делянки, на которой контур не является прямоугольным (фиг. 6).
Объектом изобретения является способ контролируемого засева сельскохозяйственной делянки 1 при помощи сеющей машины 2 или сцепки с сеющим агрегатом, имеющим множество индивидуальных высевающих органов 3, каждый из которых выполнен и предназначен для получения посевного ряда 4, причем эта сеющая машина 2 или сцепка выполнена с возможностью селективно и по меньшей мере временно прерывать один, несколько или все посевные ряды 4 посредством блокировки и/или откидывания соответствующего органа или соответствующих органов 3, чтобы выполнить технологическую колею на указанной делянке 1, избегая повреждения культур во время предусмотренного(ых) прохождения(ий) одной или нескольких известной(ых) машин или сцепки(ок), предназначенных для осуществления последующей(их) операции(ий) на этой делянке 1.
В рамках этого способа предварительно разрабатывают виртуальный план делянки с текущими, как правило, прямолинейными участками 4’ расположений посевных рядов, которые надо выполнить, по меньшей мере в основной внутренней области 5 указанной делянки 1 и, возможно, в периферической области 6 края поля, проходящей вдоль или окружающей, в случае необходимости, по меньшей мере частично эту внутреннюю область 5, определяют на его основе траектории машины или сеющей сцепки 2, которой управляют с целью осуществления контролируемого посева с выполнением технологической колеи для этих текущих участков 4’ в зависимости от траекторий ходовых органов машины(машин) или сцепки(ок), осуществляющей(их) последующую(ие) операцию(ии) на этих текущих участках.
Согласно изобретению, в рамках способа обеспечивают и учитывают также конкретные траектории 7, 8 машины(машин) или сцепки(ок), осуществляющей(их) вышеупомянутую(ые) последующую(ие) операцию(ии) по меньшей мере во время перемещений на поворотах, во время разворотов или между текущими участками, и управляют сеющей машиной или сеющей сцепкой 2 с целью осуществления контролируемого посева с выполнением технологической колеи также во время этих конкретных траекторий 7, 8.
Осуществляя выполнение так называемой «полной» технологической колеи на рассматриваемой делянке с учетом во время операции посева будущих траекторий и, следовательно, следов прохождения (пунктирными линиями на различных фигурах показаны полосы, не засеиваемые во время посева) машины(машин) или сцепки(ок), осуществляющей(их) последующую(ие) операцию(ии), по меньшей мере для вышеупомянутых текущих маневров, заявленный способ позволяет добиться поставленной цели, а именно сократить трату семян, в частности, за пределами прямых участков расположений посевных рядов делянки, ограничивая непродуктивное внесение семян.
Таким образом, распределение семян отсутствует не только в парах полос земли, как правило, параллельных и прямолинейных, находящихся во внутренней области делянки (и соответствующих рядам) и используемых впоследствии ходовыми средствами сельскохозяйственных машин или сцепок, осуществляющих последующие операции после посева, но также в парах полос земли, как правило, параллельных и прямолинейных или нет, находящихся за пределами делянки (и соответствующих, в частности, путям соединения, маневра, края поля или разворота) и используемых впоследствии ходовыми средствами этих сельскохозяйственных машин или сцепок.
Если рассматриваемая делянка не содержит периферических зон, выделенных для маневров, эти маневры производятся внутри делянки и соответственно уменьшают внутреннюю область с параллельными и прямолинейными рядами.
Среди последующих операций, которые нормально следует учитывать во время посева с учетом используемого оборудования, можно, в частности, указать действия после посева и перед сборкой урожая, такие как рыхление, полив, разбрасывание удобрений, внесение удобрений и ирригацию.
Кроме выигрышей, связанных с вышеупомянутых маневрами, можно также получать дополнительные выигрыши, предпочтительно предусматривая, чтобы в рамках заявленного способа определять и учитывать конкретные траектории 8 машины(машин) или сцепки(ок), осуществляющей(их) вышеупомянутую(ые) последующую(ие) операцию(ии) во время маневров, связанных с уклонением от объектов или препятствий 9, с входами или выходами с делянки, с операциями пополнения или заправки ресурсами или с прогнозируемыми специфическими операциями, например, в зависимости от природы культивируемых растений на рассматриваемой делянке, от характеристик почвы на ней и/или от соответствующего типа машины(машин) или сцепки(ок).
Сравнение каждой из фиг. 3 и 4 соответственно с каждой из фиг. 1 и 2 позволяет визуально оценить увеличение площади технологической колеи и, следовательно, пропорционально экономию семян, не вносимых в почву на уровне площадей делянки, подвергающихся последующему укатыванию, причем в зависимости от учитываемых маневров.
В соответствии с предпочтительным дополнительным отличительным признаком в рамках способа предварительно для прогнозируемых маневров производят моделирование траекторий ходовых средств различных машин или сцепок, осуществляющих последующую(ие) операцию(ии), которые могут применяться на рассматриваемой делянке 1, с учетом возможного фактора ошибки или отклонения, определяемого при помощи измерений во время работы в реальных условиях.
Этот фактор позволяет исправить ошибки в формировании технологической колеи, связанные с природой земельного участка, например, с уклоном на делянке. Эти ошибки могут быть также связаны с механическими элементами, присутствующими на машине или сцепке, осуществляющей последующую операцию, или на связанном с ней орудии.
Эти механические элементы могут, например, соответствовать так называемым «ведомым» или «управляемым» колесным осям, которые улучшают радиус поворота сцепки (включающей в себя содержащую их сельскохозяйственную машину) и облегчают маневры. Вместе с тем, они не являются идеальными и, как правило, не позволяют орудию или прицепной машине на 100% следовать по тем же следам, что и трактор. Этот тип «ведомой» колесной оси с технологией автоматического управления, называемой «Track Assist», основанной на использовании гироскопов и учитывающей данные GPS, применяется компанией Kuhn-Blanchard на своих прицепных поливальных установках, называемых «Metris 2» и «Oceanis 2» (зарегистрированные товарные знаки).
Этот фактор ошибки позволяет также исправить человеческую ошибку, возникающую естественным образом во время маневров, производимых водителем.
В соответствии с предпочтительным вариантом осуществления изобретения виртуальный план делянки 1 содержит также разбивку ее площади на рабочие зоны в связи с рекомендациями по посеву, такими как варьирование дозы семян и/или вносимого удобрения, скорость работы, глубина работы, специальная регулировка по меньшей мере одного рабочего параметра машины или сеющей сцепки 2 или их аналогов.
Эти различные рекомендации можно, в частности, просмотреть и обработать при помощи приложения, например, известного под обозначением «EasyMaps» и разработанного заявителем.
Предпочтительно контролируемый засев делянки 1 осуществляет роботизируемая машина 2, работающая автономно или управляемая дистанционно, рабочая ширина L которой предпочтительно является целым числом, кратным рабочей ширине различных машин или сцепок, осуществляющих последующую(ие) операцию(ии), которые могут применяться на рассматриваемой делянке 1, причем они предпочтительно относятся также к типу роботизированной машины, работающей автономно, или управляемой дистанционно.
Пример применения такой автоматизированной обработки делянки роботами описан, в частности, во французских патентных заявках n° FR 2 009 696 и n° FR 2 009 705.
Машина(ы) или сцепка(и), осуществляющая(ие) последующую(ие) операцию(ии), могут быть разного типа, например: обычным трактором с водителем, автономным роботом без водителя, самоходным транспортным средством, вездеходным четырехколесным транспортным средством или их аналогами, в случае необходимости, связанными по меньшей мере с одной машиной или по меньшей мере с одним навесным, полуприцепным или прицепным сельскохозяйственным орудием.
Точно так же, ходовые средства этих машин или сцепок могут быть самыми разными: колесами, гусеницами, смешанными или другими средствами, каждое из которых имеет специфические характеристики или свойства.
Все положения, упомянутые выше в связи с машиной(ами) или сцепкой(ами), осуществляющей(ими) последующую(ие) операцию(ии) и известной(ыми) до этого, предпочтительно учитываются во время предварительного определения стратегии выполнения полной технологической колеи, применяемой сеющей машиной 2.
В соответствии с практическим осуществлением изобретения в связи с автономными машинами (типа сельскохозяйственных роботов) предпочтительно предусмотрено, чтобы генерирование команд, которые должны соблюдаться для выполнения полной технологической колеи, происходило в момент генерирования рабочей «задачи» рассматриваемой автономной машины, то есть в момент, когда определяют пути прохождения, по которым будут следовать последующие используемые машины.
Это генерирование путей прохождения осуществляет, например, специальная программа, которую использует земледелец, вводя и/или загружая различные характеристики предстоящей работы (данные о делянке, возможные препятствия, машина/машины, которые будут использованы для посева и последующих операций, скорость работы и т.д.). Затем этот путь прохождения направляется (полностью или частично по мере продвижения) в виде команд на различные автономные машины в момент запуска работы. При этом имеется система-супервизор (блок контроля и управления парком автономных машин) для обеспечения связи между генерируемым заранее путем прохождения и применяемыми сельскохозяйственными роботами в момент выполнения задачи. Как только указанная(ые) автономная(ые) машина(ы) получает(ют) команды, программа, установленная на рассматриваемой машине, занимается управлением сеялкой (применяя, например, упомянутую выше технологию «Section Control») для засева делянки с соблюдением предусмотренной полной технологической колеи.
Точно так же, для следующих операций команды, передаваемые на машины, будут учитывать следы полной технологической колеи для ее соблюдения.
Объектом изобретения является также система для осуществления описанного выше способа контролируемого засева.
Эта система содержит сеющую автономную или полуавтономную машину или сцепку 2 с сеющим агрегатом, имеющую множество индивидуальных высевающих органов 3, выполненных с возможностью и предназначенных, каждый, производить посевной ряд 4, причем эта машина или сцепка 2 выполнена с возможностью селективно или по меньшей мере временно прерывать один, несколько или все посевные ряды 4 посредством блокировки и, возможно, откидывания соответствующего(их) органа(ов).
Эта система отличается тем, что машина или сцепка 2 оснащена средствами управления, включающими в себя компьютерное средство, выполненное с возможностью применять виртуальный план предназначенной для засева делянки 1 и разрабатывать и исполнять протокол перемещения и работы указанной машины или сцепки 2 для осуществления контролируемого посева с селективным выполнением технологической колеи на всей рассматриваемой делянке 1 в зависимости от траекторий ходовых органов машины(машин) или сцепки(ок), осуществляющей(их) операции, следующие за засевом этой делянки.
Предпочтительно сеющая машина или сцепка 2 является роботизированной машиной, работающей в автономном режиме, в полуавтономном режиме или управляемой дистанционно.
Разумеется, изобретение не ограничивается описанными и представленными на прилагаемых чертежах вариантами осуществления. В них можно вносить изменения, в частности, с точки зрения состава различных элементов или посредством их замены техническими эквивалентами, не выходя при этом за рамки объема защиты изобретения.
Группа изобретений относится к сельскому хозяйству. Способ контролируемого засева сельскохозяйственной делянки при помощи сеющей автономной или полуавтономной машины или сцепки с сеющим агрегатом, имеющим индивидуальные высевающие органы, каждый из которых предназначен и выполнен с возможностью выполнения посевного ряда, в котором эта сеющая машина или сцепка выполнена с возможностью селективно и по меньшей мере временно прерывать по меньшей мере один или все посевной(-ые) ряд(-ы) посредством блокировки и/или откидывания соответствующего органа или соответствующих органов, чтобы произвести выполнение технологической колеи на указанной делянке, предотвращая повреждение сельскохозяйственных культур во время запланированного(-ых) прохождения(-ий) по меньшей мере одной машины(-н) или сцепки(-ок), предназначенной(-ых) для осуществления по меньшей мере одной последующей(-их) операции(-ий) на этой делянке. Способ включает предварительную разработку виртуального плана делянки с текущими, в основном, прямолинейными участками расположений посевных рядов, предназначенных для выполнения по меньшей мере в основной внутренней области указанной делянки и, возможно, в периферической области края поля, проходящей вдоль или окружающей, в случае необходимости, по меньшей мере частично эту внутреннюю область; далее определяют на его основе траектории машины или сеющей сцепки, контролируемо управляемой для осуществления контролируемого посева с выполнением технологической колеи для этих текущих участков в зависимости от траекторий ходовых органов машины(-ин) или сцепки(-ок), осуществляющей(-их) последующую(-ие) операцию (-ии) на этих текущих участках. Также предоставляют и учитывают конкретные траектории машины(-ин) или сцепки(-ок), осуществляющей(-их) вышеупомянутую(-ые) последующую(-ие) операцию(-ии) по меньшей мере во время прохождения поворотов, во время разворотов или между текущими участками, и управляют машиной или сеющей сцепкой с целью осуществления контролируемого посева с выполнением технологической колеи также во время этих конкретных траекторий. Система для осуществления способа контролируемого засева содержит сеющую автономную или полуавтономную машину или сцепку с сеющим агрегатом, имеющую индивидуальные высевающие органы, каждый из которых предназначен и выполнен с возможностью выполнения посевного ряда. Машина или сцепка выполнена с возможностью селективно или по меньшей мере временно прерывать по меньшей мере один или все посевные ряды посредством блокировки и, возможно, откидывания соответствующего(-их) органа(-ов). Машина или сцепка оснащена средствами управления, включающими в себя компьютерное средство, выполненное с возможностью применять виртуальный план предназначенной для засева делянки и разрабатывать и исполнять протокол перемещения и работы указанной машины или сцепки для осуществления контролируемого посева с селективным выполнением технологической колеи на всей рассматриваемой делянке в зависимости от траекторий ходовых органов машины(-ин) или сцепки(-ок), осуществляющих операцию(-ии), следующую(-ие) за засевом этой делянки. Обеспечивается уменьшение бесполезной траты семян, в частности, за пределами прямых участков расположений посевных рядов делянки, ограничивая непродуктивный посев семян, то есть внесение семян, не приводящее к выращиванию растения, урожай которого может быть получен впоследствии. 2 н. и 5 з.п. ф-лы, 6 ил.
1. Способ контролируемого засева сельскохозяйственной делянки (1) при помощи сеющей автономной или полуавтономной машины или сцепки (2) с сеющим агрегатом, имеющим индивидуальные высевающие органы (3), каждый из которых предназначен и выполнен с возможностью выполнения посевного ряда (4), причем эта сеющая машина или сцепка (2) выполнена с возможностью селективно и по меньшей мере временно прерывать по меньшей мере один или все посевной(-ые) ряд(-ы) (4) посредством блокировки и/или откидывания соответствующего органа или соответствующих органов (3), чтобы произвести выполнение технологической колеи на указанной делянке (1), предотвращая повреждение сельскохозяйственных культур во время запланированного(-ых) прохождения(-ий), по меньшей мере одной, машины(-н) или сцепки(-ок), предназначенной(-ых) для осуществления по меньшей мере одной последующей(-их) операции(-ий) на этой делянке (1), при этом указанный способ включает предварительную разработку виртуального плана делянки с текущими, в основном, прямолинейными участками (4') расположений посевных рядов, предназначенных для выполнения по меньшей мере в основной внутренней области (5) указанной делянки (1) и, возможно, в периферической области (6) края поля, проходящей вдоль или окружающей, в случае необходимости, по меньшей мере частично эту внутреннюю область (5), определяют на его основе траектории машины или сеющей сцепки (2), контролируемо управляемой для осуществления контролируемого посева с выполнением технологической колеи для этих текущих участков (4') в зависимости от траекторий ходовых органов машины(-ин) или сцепки(-ок), осуществляющей(-их) последующую(-ие) операцию(-ии) на этих текущих участках, отличающийся тем, что также предоставляют и учитывают конкретные траектории (7, 8) машины(-ин) или сцепки(-ок), осуществляющей(-их) вышеупомянутую(-ые) последующую(-ие) операцию(-ии) по меньшей мере во время прохождения поворотов, во время разворотов или между текущими участками, и управляют машиной или сеющей сцепкой (2) с целью осуществления контролируемого посева с выполнением технологической колеи также во время этих конкретных траекторий (7, 8).
2. Способ по п. 1, отличающийся тем, что определяют и учитывают также конкретные траектории (8) машины(-ин) или сцепки(-ок), осуществляющей(-их) вышеупомянутую(-ые) последующую(-ие) операцию(-ии), во время маневров, связанных с уклонением от объектов или препятствий, со входами или с выходами из делянки, с операциями пополнения или заправки ресурсами или с прогнозируемыми специфическими операциями, например, в зависимости от природы культивируемых растений на рассматриваемой делянке, от характеристик почвы этой делянки и/или от соответствующего типа машины(-ин) или сцепки(-ок).
3. Способ по п. 1 или 2, отличающийся тем, что предварительно для прогнозируемых маневров производят моделирование траекторий ходовых средств машин или сцепок, осуществляющих последующую(-ие) операцию(-ии), которая(-ые) могут применяться на рассматриваемой делянке, с учетом возможного фактора ошибки или отклонения, определяемого при помощи измерений во время работы в реальных условиях.
4. Способ по любому из пп. 1-3, отличающийся тем, что виртуальный план делянки (1) содержит также разбивку ее площади на рабочие зоны в связи с рекомендациями по посеву, такими как варьирование дозы семян и/или вносимого удобрения, скорость работы, глубина работы, специальная регулировка по меньшей мере одного рабочего параметра машины или сеющей сцепки (2).
5. Способ по любому из пп. 1-4, отличающийся тем, что контролируемый засев делянки (1) осуществляет роботизируемая машина (2), работающая автономно или управляемая дистанционно, рабочая ширина (L) которой предпочтительно является целым числом, кратным рабочей ширине машин или сцепок, осуществляющих последующую(-ие) операцию(-ии), которая(-ые) может(-ут) применяться на рассматриваемой делянке (1), причем они предпочтительно относятся также к типу роботизированной машины, работающей автономно или управляемой дистанционно.
6. Система для осуществления способа контролируемого засева по любому из пп. 1-5, содержащая сеющую автономную или полуавтономную машину или сцепку (2) с сеющим агрегатом, имеющую индивидуальные высевающие органы (3), каждый из которых предназначен и выполнен с возможностью выполнения посевного ряда (4), причем эта машина или сцепка (2) выполнена с возможностью селективно или по меньшей мере временно прерывать по меньшей мере один или все посевные ряды (4) посредством блокировки и, возможно, откидывания соответствующего(-их) органа(-ов), отличающаяся тем, что машина или сцепка (2) оснащена средствами управления, включающими в себя компьютерное средство, выполненное с возможностью применять виртуальный план предназначенной для засева делянки (1) и разрабатывать и исполнять протокол перемещения и работы указанной машины или сцепки (2) для осуществления контролируемого посева с селективным выполнением технологической колеи на всей рассматриваемой делянке (1) в зависимости от траекторий ходовых органов машины(-ин) или сцепки(-ок), осуществляющих операцию(-ии), следующую(-ие) за засевом этой делянки.
7. Система по п. 6, отличающаяся тем, что сеющая машина или сцепка (2) является роботизированной машиной, работающей в автономном режиме, в полуавтономном режиме или управляемой дистанционно.
| ПРИБОР НЕЗАВИСИМОГО ТЕПЛОВОГО КОМФОРТА ОРГАНИЗМА ЧЕЛОВЕКА | 2007 |
|
RU2342963C1 |
| US 5050771 A, 24.09.1991 | |||
| WO 2017110116 A1, 29.06.2017 | |||
| ПРЯЖА СМЕШАННАЯ ДЛЯ ТКАНЫХ И ТРИКОТАЖНЫХ ИЗДЕЛИЙ | 2004 |
|
RU2267566C1 |
| US 6128574 A, 03.10.2000 | |||
| СИСТЕМА ПЛАНИРОВАНИЯ РАЗРАБОТКИ ПОЛЯ, СПОСОБ ПЛАНИРОВАНИЯ РАЗРАБОТКИ ПОЛЯ И СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА С ТАКОЙ СИСТЕМОЙ ПЛАНИРОВАНИЯ | 2015 |
|
RU2701892C2 |
| Способ посева пропашных культур | 2019 |
|
RU2709967C1 |

