Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству отображения информации, системе облегчения пилотирования и способу отображения информации.
Уровень техники
Воздушные суда (ВС) традиционно оснащают индикатором ILS инструментальной системы захода на посадку (Instrument Landing System) и индикатором TIS коридора допустимых траекторий (Tunnel-in-the-Sky) для получения угла отклонения и относительного положения заданной траектории полета ВС. Угол отклонения и относительное положение, полученные при помощи ILS и TIS, отображаются на основном пилотажном приборе PFD (Primary Flight Display) или директорном авиагоризонте ADI (Attitude Director Indicator), который является прибором для отображения ситуации полета ВС, тем самым помогая пилоту ВС в осуществлении управления для выдерживания заданной траектории полета.
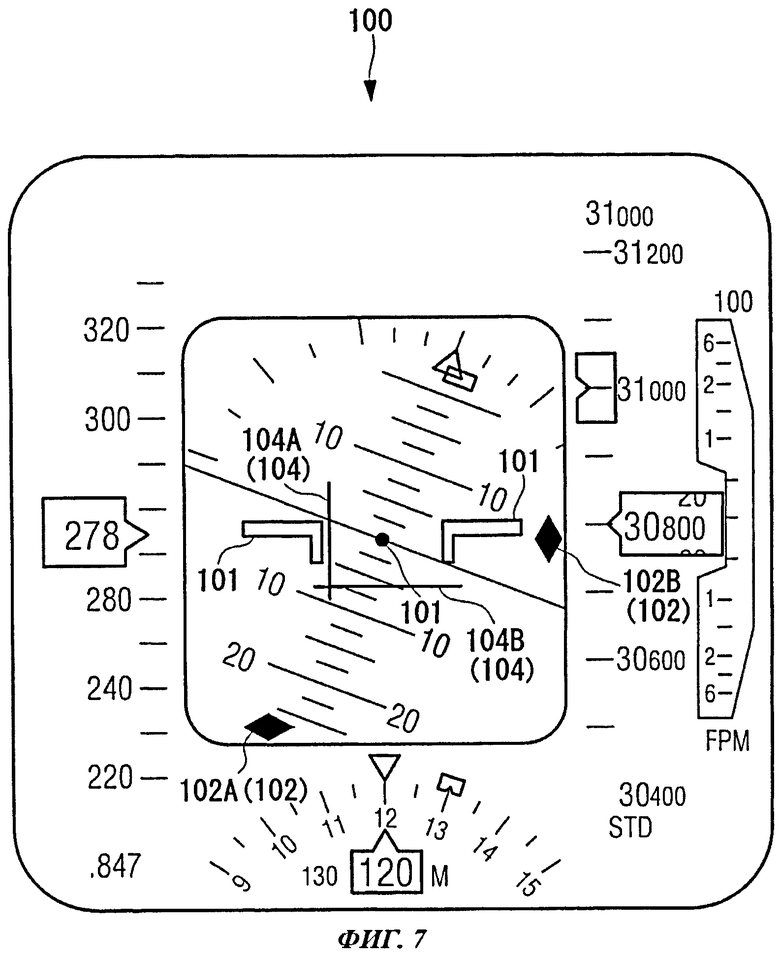
На фиг.7 изображен пример PFD 100 традиционного вида. На PFD 100 фиг.7 изображены указатели 102 курса и глиссады системы ILS, а также директорные стрелки 104 основного пилотажного прибора вместе с символом 101, изображающим ВС, которое представляет собой самолет. Указатели 102 ILS показывают угол отклонения ВС от курсового маяка (указатель 102А) и угол отклонения ВС от глиссады (указатель 102В). На фиг.7 показано, что заданная траектория полета расположена слева от ВС.
Директорные стрелки 104 указывают команды для ВС по пространственному положению (углу тангажа и углу крена) для выдерживания заданной траектории полета. Следует отметить, что в примере, показанном на фиг.7, директорная стрелка 104А угла крена дает указание накренить ВС влево, а директорная стрелка 104 В угла тангажа дает указание уменьшить тангаж ВС.
Кроме того, в нерассмотренной патентной заявке Японии Hei 11-268696 раскрыто устройство отображения траектории полета, в котором позиция отображения траектории полета самолета расположена снаружи области изображения комбинированной панели, которая входит в состав проекционного устройства отображения, причем маркер цели, указывающий направление из центра области отображения комбинированной панели к траектории полета, высвечивается на изображении комбинированной панели. Следует отметить, что вышеуказанная траектория полета построена из множества маркеров траектории, при этом маркеры траектории наклонены в соответствии с пространственным положением планера, которое оценивается, когда производится отображение планера на маркерах траектории.
Однако при использовании ILS, TIS и устройства отображения траектории полета, описанного в патентной заявке Японии Hei 11-268696, пилот может определить угол отклонения и положение воздушного судна относительно заданной траектории полета, но не может уяснить, как управлять воздушным судном, чтобы следовать заданной траектории полета.
Кроме того, директорные стрелки 104 представляют собой символы, указывающие заданный угол тангажа и заданный угол крена (заданный угол тангажа и заданный угол крена собирательно называются «заданным пространственным положением относительно земли»), которые требуются, чтобы ВС следовало по заданной траектории полета. Угол тангажа и угол крена ВС не указывают направление движения самого ВС, а указывают направление продольной оси ВС - направление носа, при этом направление носа не обязательно совпадает с направлением движения. Поэтому директорные стрелки 104 просто указывают пространственное положение относительно земли, что является косвенной информацией, которая необходима, чтобы выйти на направление, по которому должно следовать ВС. То же самое касается ILS, TIS и устройства отображения траектории полета, описанного в патентной заявке Японии Hei 11-268696, при этом в некоторых случаях при помощи прибора PFD 100, показанного на фиг.7, пилот не может четко определить направление движения ВС.
Следовательно, показанному на фиг.7 прибору PFD 100 и устройству отображения траектории полета, описанному в патентной заявке Японии Hei 11-268696, присуща проблема, заключающаяся в возможном перерегулировании или недорегулировании во время ведения ВС по заданной траектории полета.
Раскрытие изобретения
Настоящее изобретение выполнено с учетом указанных обстоятельств, и задача изобретения заключается в создании устройства отображения для самолета (воздушного судна), системы облегчения пилотирования и способа отображения, которые позволяют управлять воздушным судном при его ведении по траектории с большей точностью, чем в случае, когда управление самолетом осуществляется на основе заданного пространственного положения относительно земли.
В соответствии с настоящим изобретением в его первом аспекте, предлагается устройство отображения, выполненное с возможностью отображения ситуации полета самолета (воздушного судна), причем указанное устройство выполнено с возможностью отображения относительной разности между заданным пространственным положением относительно воздушного потока, представленным заданным углом атаки и заданным углом скольжения воздушного судна, которые необходимы для выхода на заданную траекторию полета, и текущим пространственным положением относительно воздушного потока, представленным текущим углом атаки и текущим углом скольжения воздушного судна.
Согласно вышеуказанному аспекту, устройство отображения, которое отображает ситуацию полета воздушного судна, показывает разность между заданным пространственным положением относительно воздушного потока, которое представлено заданным углом атаки и заданным углом скольжения воздушного судна, которые необходимы для выхода на заданную траекторию полета, и текущим пространственным положением относительно воздушного потока, которое представлено текущим углом атаки и текущим углом скольжения воздушного судна.
Если управление самолетом осуществляется на основе заданного пространственного положения относительно земли (направления носа), которое указывается заданным углом тангажа и заданным углом крена, то в некоторых случаях при управлении выдерживанием заданной траектории полета может иметь место перерегулирование или недорегулирование из-за того, что пространственное положение относительно земли не указывает направление движения самолета.
Однако пространственное положение относительно воздушного потока указывает на направление движения самолета. Таким образом, в настоящем изобретении заданное направление движения указывается в форме заданного пространственного положения относительно воздуха и осуществляется отображение относительной разности между заданным пространственным положением относительно воздушного потока и текущим пространственным положением относительно воздушного потока, обеспечивая тем самым возможность более точного ведения самолета по траектории, чем в случае, когда управление основывается на заданном пространственном положении относительно земли. В частности, например, когда все рулевые поверхности оказываются бездействующими, и управление выдерживанием заданной траектории полета осуществляется при помощи одной только тяги двигателей, пилоту трудно оценить адекватный уровень управляющего воздействия из-за медленной реакции и замедленного движения ВС. Однако, в соответствии с настоящим изобретением, даже когда управление выдерживанием заданной траектории осуществляется только при помощи тяги двигателей, пилот может управлять движением ВС по траектории с большей точностью.
Кроме того, согласно вышеуказанному первому аспекту, предпочтительно заданный угол атаки получать путем вычитания угла между горизонтальной плоскостью и заданным направлением движения из текущего угла тангажа ВС; а заданный угол скольжения получать путем вычитания текущего угла курса ВС из путевого угла, соответствующего заданному направлению движения.
Согласно вышеуказанному аспекту, заданный угол атаки получен путем вычитания угла между горизонтальной плоскостью и заданным направлением движения из текущего угла тангажа ВС, а заданный угол скольжения получен путем вычитания текущего угла курса ВС из путевого угла, соответствующего заданному направлению движения. Текущий угол тангажа ВС и текущий угол курса ВС - это данные, получаемые от имеющихся датчиков, предусмотренных на самолете - воздушном судне, а угол между горизонтальной плоскостью и заданным направлением движения, а также путевой угол, соответствующий заданному направлению движения - это данные, получаемые в процессе автоматического управления. Согласно настоящему изобретению, можно простым образом получать данные заданного угла атаки и заданного угла скольжения.
Кроме того, согласно вышеуказанному первому аспекту, предпочтительно, чтобы осуществлялось высвечивание первого маркера, соответствующего заданному пространственному положению относительно воздушного потока, и второго маркера, соответствующего текущему пространственному положению относительно воздушного потока.
Согласно вышеуказанному аспекту, высвечивание первого маркера, соответствующего заданному пространственному положению относительно воздушного потока, и второго маркера, соответствующего текущему пространственному положению относительно воздушного потока осуществляется на устройстве отображения. Поэтому пилот может легко определять заданное пространственное положение ВС относительно воздушного потока и текущее пространственное положение ВС относительно воздушного потока. Согласно настоящему изобретению, работать пилоту становится удобнее.
Кроме того, согласно вышеуказанному первому аспекту, предпочтительно, чтобы отображение относительных положений первого и второго маркеров осуществлялось в процессе изменения относительной разности между заданным пространственным положением относительно воздушного потока и текущим пространственным положением относительно воздушного потока.
Согласно вышеуказанному аспекту, отображение относительных положений первого и второго маркеров осуществляется в процессе изменения относительной разности между заданным пространственным положением относительно воздушного потока и текущим пространственным положением относительно воздушного потока. Таким образом, когда ВС приближается к заданному направлению движения, первый маркер и второй маркер сближаются друг с другом, при этом, когда ВС летит по заданному направлению движения, указанные маркеры совмещены друг с другом. Поэтому, пилот может легко заставить воздушное судно выйти на заданную траекторию полета. Согласно настоящему изобретению, работать пилоту становится удобнее.
Кроме того, согласно вышеуказанному первому аспекту, предпочтительно вычисление заданной траектории полета производить на основе текущего местоположения ВС и заданного местоположения, которое ВС должно занять.
Текущее местоположение ВС получают, например, при помощи датчика GPS (глобальной системы определения местоположения), а заданное местоположение получают, например, при помощи бортового компьютера.
К примеру, ведение воздушного судна с использованием заданной траектории полета, которая указывается радиосигналами от глиссадной антенны и антенны курсового маяка, которые установлены в аэропорту, т.е. управление с использованием ILS, позволяет вести ВС на посадку только из ближней зоны аэропорта.
Однако ведение воздушного судна с использованием заданной траектории полета, которая формируется на основе текущего местоположения ВС и заданного местоположения, в котором воздушное судно должно оказаться, позволяет вести ВС в аэропорт (заданное положение) из зоны, не оборудованной средствами ILS, например, в случае аварийного снижения с высоты крейсерского полета или изменения путевого угла, когда на ВС возникает отказ.
В соответствии с настоящим изобретением в его втором аспекте, предлагается система облегчения пилотирования, содержащая устройство отображения, выполненное с возможностью отображения относительной разности между заданным пространственным положением относительно воздушного потока, представленным заданным углом атаки и заданным углом скольжения воздушного судна, которые необходимы для выхода на заданную траекторию полета, и текущим пространственным положением относительно воздушного потока, представленным текущим углом атаки и текущим углом скольжения воздушного судна; и управляющее устройство, оснащенное средствами вычисления заданного угла атаки для получения заданного угла атаки путем вычитания угла между горизонтальной плоскостью и заданным направлением движения из текущего угла тангажа воздушного судна, а также средствами вычисления заданного угла скольжения для получения заданного угла скольжения путем вычитания текущего угла курса воздушного судна из путевого угла для заданного направления движения, причем управляющее устройство выполнено с возможностью управления устройством отображения для отображения относительной разности между текущим пространственным положением относительно воздушного потока и заданным пространственным положением относительно воздушного потока, которое представлено вычисленными заданным углом атаки и заданным углом скольжения.
Согласно вышеуказанному аспекту, заданное направление движения получают в форме заданного пространственного положения относительно воздушного потока, при этом устройство отображает относительную разность между заданным пространственным положением относительно воздушного потока и текущим пространственным положением относительно воздушного потока, давая возможность вести самолет с большей точностью, чем в случае, когда управление самолетом основано на заданном пространственном положении относительно земли.
В соответствии с настоящим изобретением в его третьем аспекте, предлагается способ отображения ситуации полета самолета (воздушного судна), на устройстве отображения, в котором отображают на устройстве отображения относительную разность между заданным пространственным положением относительно воздушного потока, представленным заданным углом атаки и заданным углом скольжения воздушного судна, которые необходимы для выхода на заданную траекторию полета, и текущим пространственным положением относительно воздушного потока, представленным текущим углом атаки и текущим углом скольжения воздушного судна.
Согласно вышеуказанному аспекту, заданное направление движения получают в форме заданного пространственного положения относительно воздушного потока, при этом устройство отображает относительную разность между заданным пространственным положением относительно воздушного потока и текущим пространственным положением относительно воздушного потока, давая возможность вести самолет с большей точностью, чем в случае, когда управление самолетом основано на заданном пространственном положении относительно земли.
Настоящее изобретение имеет преимущество, заключающееся в том, что обеспечивается более высокая точность ведения воздушного судна по траектории, чем в случае, когда управление самолетом основано на заданном пространственном положении относительно земли.
Краткое описание чертежей
Фиг.1 схематически изображает пример основного пилотажного прибора PFD, соответствующего варианту осуществления настоящего изобретения.
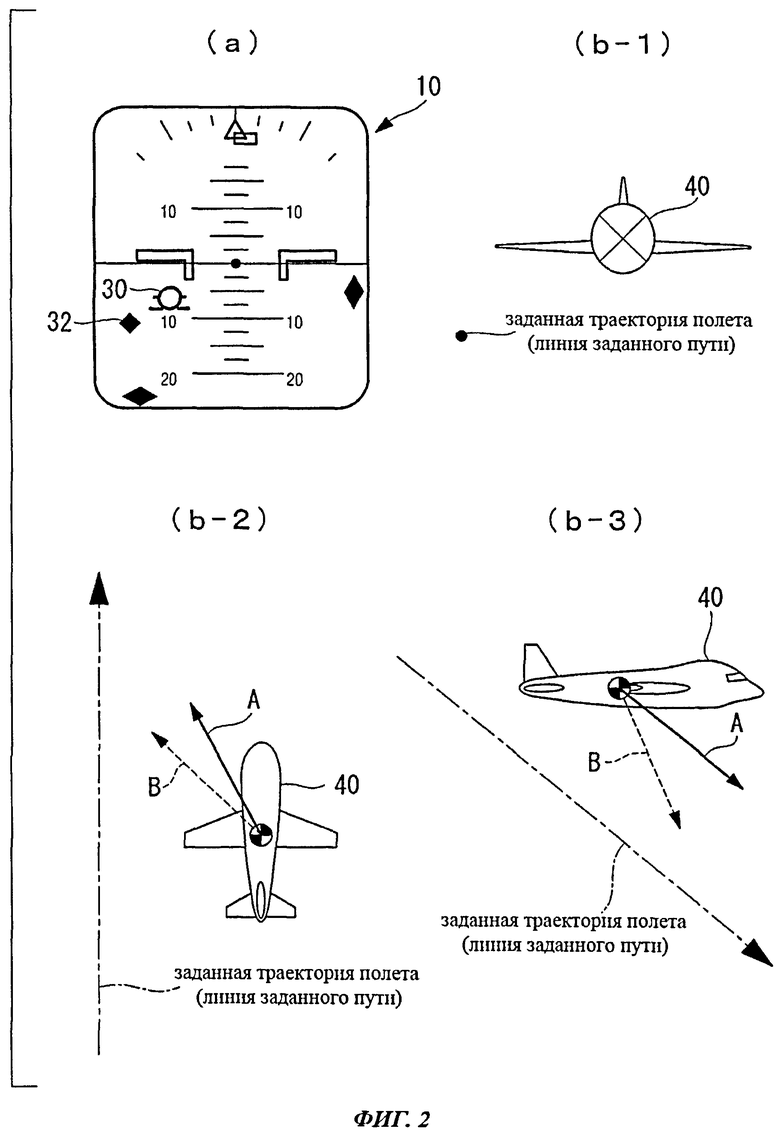
Фиг.2 представляет ряд эскизов, поясняющих функцию маркера заданного пространственного положения относительно воздушного потока, отображаемого на PFD, соответствующем варианту осуществления настоящего изобретения, при этом фиг.2(a) изображает пример PFD, фиг.2(b-1) изображает взаимное расположение ВС и заданной траектории полета, соответствующей маркеру заданного пространственного положения относительно воздушного потока, отображаемому на PFD фиг.2(a), фиг.2(b-2) представляет вид сверху, соответствующий фиг.2(b-1), а фиг.2(b-3) представляет вид сбоку, соответствующий фиг.2(b-1).
Фиг.3 изображает блок-схему электрических связей системы облегчения пилотирования, соответствующей варианту осуществления настоящего изобретения.
Фиг.4 схематически изображает принцип получения заданного угла атаки, соответствующий варианту осуществления настоящего изобретения.
Фиг.5 схематически изображает принцип получения заданного угла скольжения, соответствующий варианту осуществления настоящего изобретения.
Фиг.6 представляет ряд эскизов, изображающих изменение информации на PFD в соответствии с вариантом осуществления настоящего изобретения, пока воздушное судно не будет выведено на заданную траекторию полета, при этом фиг.6(a) изображает состояние, при котором ВС летит в направлении, которое отклонено от заданного направления движения, фиг.6(b) изображает состояние, при котором ВС выполняет полет в заданном направлении движения, а фиг.6(c) изображает состояние, при котором ВС продолжает полет так, что маркер заданного пространственного положения относительно воздушного потока и метка FPM совмещены.
Фиг.7 схематически изображает пример стандартного PFD.
Осуществление изобретения
Устройство отображения информации, система облегчения пилотирования и способ отображения информации, соответствующие варианту осуществления настоящего изобретения, будут описаны ниже со ссылками на прилагаемые чертежи.
Фиг.1 изображает PFD 10 - устройство отображения информации, соответствующее указанному варианту осуществления, для отображения ситуации полета ВС, которое представляет собой самолет.
PFD 10 представляет собой комплексный индикатор и содержит символы 12 самолета, указатель 14 воздушной скорости, который показывает воздушную скорость ВС, высотомер 16, который показывает высоту ВС, указатель 18 тангажа, который показывает угол тангажа ВС, указатели 20 ILS (указатели 20A и 20B), и указатель 22 вертикальной скорости, который показывает вертикальную скорость ВС.
Кроме того, на PFD 10 в данном варианте осуществления отображается маркер 30 траектории полета (FPM, Flight Path Marker) и маркер 32 заданного пространственного положения относительно воздушного потока. FPM 30 это метка, указывающая текущее пространственное положение относительно воздушного потока, которое представляет текущий угол атаки ВС (угол между проекцией направления движения ВС на плоскость симметрии планера и осью ВС) и текущий угол скольжения (угол между направлением движения ВС и плоскостью симметрии планера), другими словами - метка, указывающая направление движения ВС. Следует отметить, что если угол атаки ВС велик, или если угол скольжения ВС велик, то направление движения ВС не совпадает с направлением носа ВС. Поэтому на PFD 10 отображается маркер FPM 30, указывающий направление движения ВС, давая возможность пилоту легко определять текущее направление движения ВС.
С другой стороны, маркер 32 заданного пространственного положения относительно воздушного потока - это метка, указывающая заданное пространственное положение относительно воздушного потока, которое представлено заданным (целевым) углом атаки и заданным (целевым) углом скольжения ВС, которые необходимы для выхода на заданную (целевую) траекторию полета (линию заданного пути).
На фиг.2 представлена серия эскизов, изображающих взаимное расположение FPM 30 и маркера 32 заданного пространственного положения относительно воздушного потока, которые отображаются на PFD 10, воздушное судно 40, которое представляет собой самолет, и заданную траекторию полета.
На фиг.2(b-1) изображено взаимное расположение ВС 40 и заданной траектории полета, соответствующее маркеру 32 заданного пространственного положения относительно воздушного потока, отображаемому на PFD 10, показанному на фиг.2(a), когда ВС 40 летит в определенном направлении движения, если смотреть в хвост воздушному судну.
С другой стороны, фиг.2(b-2) представляет вид сверху, соответствующий фиг.2(b-1), а фиг.2(b-3) представляет вид сбоку, соответствующий фиг.2(b-1). На фиг.фиг.2 (b-2) и 2(b-3) сплошная линия А, исходящая из центра тяжести ВС 40, указывает текущее направление движения ВС 40, соответствующее FPM 30, а исходящая оттуда же штриховая линия В, указывает на заданное направление движения ВС 40, соответствующее маркеру 32 заданного пространственного положения относительно воздушного потока.
В данном варианте осуществления PFD 10 отображает относительную разность между FPM 30 и маркером 32 заданного пространственного положения относительно воздушного потока. Точнее, когда FPM 30 совмещается с маркером 32 заданного пространственного положения относительно воздушного потока (накладывается на маркер 32), воздушное судно летит в заданном направлении движения.
Фиг.3 представляет собой функциональную схему системы 52 облегчения пилотирования, которая содержит управляющее устройство 50, которое обеспечивает отображение различных данных на PFD 10 в данном варианте осуществления изобретения. Следует отметить, что из всех функций управляющего устройства 50 на фиг.3 показаны только функции, необходимые для отображения на PFD 10 маркера 32 заданного пространственного положения относительно воздушного потока. Точнее, управляющее устройство 50, помимо функции отображения на PFD 10 маркера 32 заданного пространственного положения относительно воздушного потока, содержит также функции для отображения символов 12 самолета, указателя 14 воздушной скорости, высотомера 16, указателя 18 тангажа, указателей 20 ILS, FPM 30 и указателя 22 вертикальной скорости.
Управляющее устройство 50 содержит блок 54 вычисления заданного угла атаки, блок 56 вычисления заданного угла скольжения и блок 58 управления отображением.
Следует отметить, что управляющее устройство 50 соединено с блоком 60 датчиков и блоком 62 автопилота, откуда управляющее устройство принимает различную информацию.
Блок 60 датчиков оснащен различными датчиками для измерения высоты и скорости ВС 40, угла отклонения ВС 40 от заданной траектории полета, а также угла направления и угла тангажа ВС 40.
Блок 62 автопилота формирует различные виды данных, необходимые для автоматического управления ВС 40, на основе данных высоты и скорости ВС 40, а также угла отклонения от заданной траектории полета, которые принимаются из блока 60 датчиков, так что ВС 40 может совершать полет по заданной траектории полета, которая отображается на основе радиосигнала от глиссадной антенны и антенны курсового маяка системы ILS.
Блок 54 вычисления заданного угла атаки получает заданный угол атаки путем вычитания угла между горизонтальной плоскостью и заданным направлением движения из текущего угла тангажа ВС 40.
Ниже, согласно вида сбоку ВС 40, изображенного на фиг.4, будет приведено описание, как получить заданный угол атаки α.
Как показано на фиг.4, угол между направлением носа ВС 40 и горизонтальной плоскостью соответствует текущему углу θ тангажа ВС 40. Следует отметить, что угол θ тангажа измеряется блоком 60 датчиков. С другой стороны, угол у траектории между горизонтальной плоскостью и заданным направлением движения вырабатывается в блоке 62 автопилота на основе заданной траектории полета, которую указывает система ILS, и которая выдается в блок 54 вычисления заданного угла атаки в виде команды ycmd угла траектории, указывающей угол γ траектории.
Блок 54 вычисления заданного угла атаки вычисляет команду αcmd заданного угла атаки, указывающую заданный угол α атаки, как показано в уравнении (1), и выдает указанную команду в блок 58 управления отображением.

Следует отметить, что уравнение (1) представляет собой простую формулу, в то время как уравнения (2)-(4) используются для получения команды αcmd заданного угла атаки более строгим способом.



Следует отметить, что угол φ обозначает угол крена ВС 40; когда угол крена равен 0 (нулю), уравнение (2) становится эквивалентным уравнению (1).
С другой стороны, блок 56 вычисления заданного угла скольжения вырабатывает заданный угол скольжения путем вычитания текущего угла курса ВС из путевого угла, соответствующего заданному направлению движения.
Ниже, согласно вида сверху ВС 40, изображенного на фиг.5, будет приведено описание, как получить заданный угол β скольжения.
Как показано на фиг.5, угол между продольной осью ВС 40 - направлением носа и отсчетным направлением (например, севером (N)) соответствует текущему углу ψ курса ВС 40. Следует отметить, что текущий угол ψ курса измеряется блоком 60 датчиков. С другой стороны, заданный путевой угол ψ, который представляет собой угол между отсчетным направлением и заданным направлением движения, вырабатывается в блоке 62 автопилота на основе заданной траектории полета, указанной ILS, и поступает в блок 56 вычисления заданного угла скольжения в виде команды ψcmd, указывающей путевой угол ψ заданной траектории движения.
Блок 56 вычисления заданного угла скольжения производит вычисление команды βcmd заданного угла скольжения, указывающей заданный угол β скольжения, как показано в уравнении (5), и выдает указанную команду в блок 58 управления отображением.

Следует отметить, что уравнение (5) представляет собой простую формулу, в то время как уравнения (6)-(9) используются для получения команды βcmd заданного угла скольжения более строгим способом.




Следует отметить, что когда угол θ тангажа и угол φ крена равны 0 (нулю), уравнение (6) становится эквивалентным уравнению (5).
Блок 58 управления отображением определяет позицию на дисплее PFD 10 для маркера 32 заданного пространственного положения относительно воздушного потока в соответствии с командой αcmd заданного угла атаки, поступающей из блока 54 вычисления заданного угла атаки, и командой βcmd заданного угла скольжения, поступающей из блока 56 вычисления заданного угла скольжения, а также управляет PFD 10, чтобы высветить маркер 32 заданного пространственного положения относительно воздушного потока в вычисленной позиции на дисплее.
Следует отметить, что в данном варианте осуществления команда угла γcmd траектории и команда ψcmd путевого угла вырабатываются в блоке 62 автопилота; однако, это не означает, что маркер 32 заданного пространственного положения относительно воздушного потока отображается на PFD 10 только, когда используется автоматическое управление. Когда автоматическое управление не используется, команда угла γcmd траектории и команда ψcmd путевого угла также вырабатываются в блоке 62 автопилота, маркер 32 заданного пространственного положения относительно воздушного потока отображается на PFD 10, и пилот использует маркер 32 в качестве рекомендации для управления ВС. Кроме того, когда используется автоматическое управление, команда угла γcmd траектории и команда ψcmd путевого угла могут быть вычислены в блоке 62 автопилота, и маркер 32 заданного пространственного положения относительно воздушного потока может отображаться на PFD 10.
На фиг.6 показаны изменения информации, отображаемой на PFD 10, до тех пор пока ВС 40 не выходит на заданную траекторию полета.
На фиг.6(a) показано состояние, при котором маркер 32 заданного пространственного положения относительно воздушного потока и FPM 30 отображаются на PFD 10 в разных местах, поскольку направление движения ВС 40 отличается от заданного направления движения. Поэтому, пилот осуществляет управление ВС 40, так чтобы маркер 32 заданного пространственного положения относительно воздушного потока совместить с меткой FPM 30. В результате этого маркер 32 заданного пространственного положения относительно воздушного потока и метка FPM 30 постепенно сближаются. Когда маркер 32 заданного пространственного положения относительно воздушного потока совмещен с меткой FPM 30, как на фиг.6(b), воздушное судно 40 летит согласно заданному направлению движения. Затем, когда ВС 40 продолжает полет при совмещенном положении маркера 32 и метки FPM 30, указанная метка FPM 30 и маркер 32 перемещаются к центру PFD 10, как показано на фиг.6(c), и указатели 20 ILS также постепенно перемещаются к центру PFD 10.
Как говорилось выше, данный вариант PFD 10, который показывает ситуацию полета ВС 40, осуществляет отображение относительной разности между заданным пространственным положением относительно воздушного потока, которое представлено заданным углом α атаки и заданным углом β скольжения ВС 40 для выхода на заданную траекторию полета, и текущим пространственным положением относительно воздушного потока, которое представлено текущим углом атаки и текущим углом скольжения ВС 40; поэтому обеспечивается управление самолетом с более высокой точностью выдерживания траектории, чем при управлении, осуществляемом на основе данных заданного пространственного положения относительно земли.
В частности, например, когда все рулевые поверхности оказываются бездействующими и управление выдерживанием заданной траектории полета осуществляется одной только тягой двигателей, пилоту трудно задавать адекватный уровень управления по причине медленной реакции и замедленного движения ВС. Однако при использовании PFD 10 в рассматриваемом варианте осуществления, даже когда управление выдерживанием заданной траектории полета осуществляется за счет одной только тяги двигателей, пилот может выполнять управление следованием ВС 40 по заданной траектории с более высокой точностью.
Кроме того, в соответствии с рассматриваемым вариантом осуществления, заданный угол α атаки вычисляется путем вычитания угла между горизонтальной плоскостью и заданным направлением движения из текущего угла тангажа ВС 40, а заданный угол β скольжения вычисляется путем вычитания текущего угла курса ВС 40 из путевого угла для заданного направления движения. Текущий угол тангажа ВС 40 и текущий угол курса ВС 40 представляют собой данные, получаемые от имеющегося блока 60 датчиков, предусмотренного на самолете - воздушном судне 40, а угол между горизонтальной плоскостью и заданным направлением движения, а также путевой угол для заданного направления движения представляют собой данные, получаемые за счет автоматического управления. Следовательно, в соответствии с данным вариантом осуществления изобретения, имеется возможность простым способом получать заданный угол атаки и заданный угол скольжения.
Хотя настоящее изобретение было описано на примере вышеприведенного варианта осуществления, идея изобретения не ограничена рамками указанного варианта. В приведенный вариант осуществления могут быть внесены различные изменения, не выходящие за границы идеи и объема изобретения, при этом варианты осуществления, в котором проведены такие модификации и усовершенствования, также попадают в технические границы настоящего изобретения.
Например, для вышеописанного варианта осуществления рассматривался случай, когда производилось выдерживание заданной траектории полета, отображаемой на основе радиосигнала от глиссадной антенны и антенны курсового маяка, которые установлены в аэропорту, однако, настоящее изобретение не ограничивается этим случаем, и может производиться выдерживание заданной траектории полета, которая формируется исходя из текущего положения ВС 40 и заданного положения, которое ВС 40 должно занять.
Точнее, датчик определения местоположения (например, датчик GPS) для измерения текущего местоположения (широты, долготы и высоты) ВС 40 установлен на воздушном судне 40, а заданная (целевая) траектория полета вырабатывается компьютером, установленным на ВС 40, исходя из текущего местоположения ВС 40, которое измеряется датчиком местоположения, и сохраняется в блоке памяти.
Следует отметить, что упомянутый компьютер вычисляет заданное (целевое) местоположение (аэропорт назначения), которое должно занять ВС 40, исходя из различных условий, например, остатка топлива на борту ВС 40; достижимое расстояние, зависящее от остатка топлива, если на ВС 40 возникает отказ (например, отказ, при котором в крейсерском полете становятся бездействующими все рулевые поверхности, и необходимо вести ВС 40 в аэропорт, пользуясь только тягой двигателей), максимальный и минимальный радиус круга, который допустим в соответствии с состоянием отказа; длину ВПП аэропорта, планируемого для посадки; и погоду (ветер, дождь, облачность, видимость и т.п.) в зоне аэропорта, планируемого для посадки. Затем, компьютер вычисляет оптимальную траекторию полета из того места, где находится ВС 40, к аэропорту назначения и устанавливает вычисленную оптимальную траекторию полета в качестве заданной траектории полета (линии заданного пути). Следует отметить, что заданное местоположение не обязательно вычислять компьютером - оно может быть указано пилотом.
Следует отметить, что компьютер может вычислять заданную траекторию полета в определенные моменты времени и обновлять в блоке памяти текущую заданную траекторию полета данными вычисленной заданной траектории полета.
Затем блок 62 автопилота формирует команды управления, которые включают в себя команду γcmd угла траектории и команду ψcmd путевого угла, исходя из информации, указывающей относительное положение или угол отклонения ВС 40 относительно заданной траектории полета, сохраненной в блоке памяти.
Таким образом, ведение ВС с использованием заданной траектории полета, которая отображается на основе радиосигналов от глиссадной антенны и антенны курсового маяка, которые установлены в аэропорту, т.е. ведение с использованием ILS позволяет вести воздушное судно на посадку только из ближней зоны аэропорта; однако ведение ВС с использованием заданной траектории полета, сформированной на основе данных текущего местоположения ВС 40 и заданного местоположения ВС 40, в которое ВС 40 должно выйти, позволяет вести воздушное судно в аэропорт (в целевое местоположение) из зоны, не оборудованной средствами ILS, например, в случае аварийного снижения с высоты крейсерского полета или изменения путевого угла, когда на борту ВС 40 возникает отказ.
Кроме того, для вышеописанного варианта осуществления рассматривался случай, когда на PFD 10 указатели 20 ILS отображались вместе с меткой FPM 30 и маркером 32 заданного пространственного положения относительно воздушного потока; однако настоящее изобретение не ограничивается этим случаем. Может использоваться конфигурация, при которой указатели 20 ILS на PFD 10 не отображаются; конфигурация, при которой на PFD 10 вместе с указателями 20 ILS отображаются директорные стрелки; или конфигурация, при которой отображается иной символ, помогающий пилоту управлять воздушным судном.
Кроме того, для вышеописанного варианта осуществления рассматривался случай, когда в качестве устройства отображения использовался PFD 10; однако настоящее изобретение данным случаем не ограничивается, и в качестве устройства отображения могут использоваться другие средства, такие как директорный авиагоризонт ADI (Attitude Director Indicator).
Перечень позиционных обозначений
10 основной пилотажный прибор PFD (Primary Flight Display)
30 метка текущей траектории полета FPM (Flight Path Marker)
32 маркер заданного пространственного положения относительно воздушного потока
40 воздушное судно (самолет)
50 управляющее устройство
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2011 |
|
RU2474862C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| Способ автоматической посадки воздушного судна | 2023 |
|
RU2839178C2 |




Изобретение относится к системам отображения информации для облегчения пилотирования. Система содержит блок датчиков, выполненный с возможностью измерения текущей информации о полете в воздушном судне, блок автопилота, выполненный с возможностью получения информации, необходимой для полета воздушного судна по заданной траектории полета, и устройство для отображения, выполненное с возможностью отображения ситуации полета воздушного судна, и управляющее устройство, содержащее: блок получения заданного угла атаки, блок получения заданного угла скольжения, блок управления отображением. Блок получения заданного угла атаки выполнен с возможностью получения заданного угла атаки воздушного судна для выхода на заданную траекторию полета на основании угла тангажа, измеренного блоком датчиков, и угла траектории, который является углом между горизонтальной плоскостью и заданным направлением движения воздушного судна и который получают с помощью блока автопилота. Блок получения заданного угла скольжения выполнен с возможностью получения заданного угла скольжения воздушного судна для выхода на заданную траекторию полета на основании угла курса, измеренного блоком датчиков, и путевого угла для заданного направления движения, полученного блоком автопилота. Блок управления отображением выполнен с возможностью обеспечивать отображение устройством для отображения относительной разности между заданным пространственным положением относительно воздушного потока, представленным полученным заданным углом атаки и полученным заданным углом скольжения, и текущим пространственным положением относительно воздушного потока, представленным текущим углом атаки и текущим углом скольжения воздушного судна. Обеспечивается пилотирование с более точным выдерживанием заданной траектории. 2 н. и 4 з.п. ф-лы, 7 ил.
1. Система облегчения пилотирования, которая содержит блок датчиков, выполненный с возможностью измерения текущей информации о полете в воздушном судне, блок автопилота, выполненный с возможностью получения информации, необходимой для полета воздушного судна по заданной траектории полета, и устройство для отображения, выполненное с возможностью отображения ситуации полета воздушного судна, причем система содержит:
управляющее устройство, содержащее:
блок получения заданного угла атаки, выполненный с возможностью получения заданного угла атаки воздушного судна для выхода на заданную траекторию полета на основании угла тангажа, измеренного блоком датчиков, и угла траектории, который является углом между горизонтальной плоскостью и заданным направлением движения воздушного судна и который получают с помощью блока автопилота;
блок получения заданного угла скольжения, выполненный с возможностью получения заданного угла скольжения воздушного судна для выхода на заданную траекторию полета на основании угла курса, измеренного блоком датчиков, и путевого угла для заданного направления движения, полученного блоком автопилота; и
блок управления отображением, выполненный с возможностью обеспечивать отображение устройством для отображения относительной разности между заданным пространственным положением относительно воздушного потока, представленным полученным заданным углом атаки и полученным заданным углом скольжения, и текущим пространственным положением относительно воздушного потока, представленным текущим углом атаки и текущим углом скольжения воздушного судна.
2. Система по п.1, отличающаяся тем, что блок получения заданного угла атаки выполнен с возможностью получения заданного угла атаки путем вычитания угла траектории, полученного блоком автопилота, из угла тангажа, измеренного блоком датчиков,
а блок получения заданного угла скольжения выполнен с возможностью получения заданного угла скольжения путем вычитания угла курса, измеренного блоком датчиков, из путевого угла для заданного направления движения, полученного блоком автопилота.
3. Система по п.1, отличающаяся тем, что блок управления отображением выполнен с возможностью обеспечивать отображение устройством для отображения первого маркера, соответствующего заданному пространственному положению относительно воздушного потока, и второго маркера, соответствующего текущему пространственному положению относительно воздушного потока.
4. Система по п.3, отличающаяся тем, что блок управления отображением выполнен с возможностью обеспечивать отображение устройством для отображения относительных положений первого маркера и второго маркера в процессе изменения относительной разности между заданным пространственным положением относительно воздушного потока и текущим пространственным положением относительно воздушного потока.
5. Система по любому из пп.1-4, отличающаяся тем, что заданная траектория полета получена на основе текущего местоположения воздушного судна и заданного местоположения, которое воздушное судно должно занять.
6. Способ облегчения пилотирования в системе облегчения пилотирования, которая содержит блок датчиков, выполненный с возможностью измерения текущей информации о полете в воздушном судне, блок автопилота, выполненный с возможностью получения информации, необходимой для полета воздушного судна по заданной траектории полета, и устройство для отображения, выполненное с возможностью отображения ситуации полета воздушного судна, включающий следующие шаги:
получают заданный угол атаки воздушного судна для выхода на заданную траекторию полета на основании угла тангажа, измеренного блоком датчиков, и угла траектории, который является углом между горизонтальной плоскостью и заданным направлением движения воздушного судна и который получают с помощью блока автопилота;
получают заданный угол скольжения воздушного судна для выхода на заданную траекторию полета на основании угла курса, измеренного блоком датчиков, и путевого угла для заданного направления движения, полученного блоком автопилота; и
обеспечивают отображение устройством для отображения относительной разности между заданным пространственным положением относительно воздушного потока, представленным полученными заданным углом атаки и заданным углом скольжения, и текущим пространственным положением относительно воздушного потока, представленным текущим углом атаки и текущим углом скольжения воздушного судна.
| Способ сушки и консервирования дерева | 1933 |
|
SU39960A1 |
| Большая Российская энциклопедия "Авиация", М.:, 1994 | |||
| стр | |||
| Прибор для исправления снимков рельефа местности | 1921 |
|
SU301A1 |
| JP 2002267488 A, 18.09.2002 | |||
| US 6272404 B1, 07.08.2001 | |||

