Предлагаемое устройство относится к области машиностроения, роботостроения и может использоваться для коррекции положения преимущественно плоских изделий при их захвате из стандартной тары вакуумными и электромагнитными захватами, а также при выполнении сборочных операций для устранения рассогласования взаимного расположения сопрягаемых осесимметричных изделий типа вал-втулка.
Известны устройства, применяемые для компенсации рассогласований взаимного положения изделий, возникающих при их сопряжении. Управление такими устройствами подразделяют на процессы с активной, пассивной и комбинированной адаптацией (см. Сысоев, C.H. Устройства коррекции положения сопрягаемых изделий / C.H. Сысоев // Прогрессивные технологии в машиностроении [Текст]: сборник научных трудов, посвященный 40-летию кафедры технологии машиностроения - Ковров: ФГБОУ «КГТА им. В.А. Дегтярева», 2013, - с. 71-80), Сысоев C.H. Рычажные устройства автоматической сборки изделий типа «вал-втулка» / C.H. Сысоев, И.С. Литвинов, В.А. Овчинников [Текст]: Международный научно-практический журнал International Research Journal, №9 (40), часть 2, октябрь, 2015. с. 96-99.
Наиболее простыми по конструкции и управлению являются устройства с пассивной и комбинированной адаптацией сборки. Однако устройства с пассивной адаптацией отличаются низкой производительностью и функциональной ненадежностью, так как используют вероятностные методы сопряжения изделий. Наиболее эффективными являются устройства с комбинированной адаптацией, где используются причинные взаимосвязи между физическими явлениями, происходящими в технологическом процессе.
Известно устройство (см. пат. №115711 U1, МПК B25J 15/06, опубл. 10.05.2012, Сысоев C.H., Еропова Е.В., Коробова Т.Н. «Захватный корректирующий модуль»), содержащее корпус с приводом линейного перемещения изделия захватом, закрепленным на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения. Между захватом и подвижным рабочим органом последовательно установлены два рычага, закрепленные с возможностью перекоса и подпружиненные относительно среднего положения.
Устройство позволяет, используя перекос изделия типа «вал» при силовом взаимодействии с сопрягаемым объектом «втулкой», выполнить требуемую коррекцию их взаимного расположения.
Однако использование данного устройства возможно только для ситуации установки вала в отверстие втулки и не применимо для коррекции положения изделия типа «втулка» при его сопряжении с изделием типа «вал».
Известно устройство (см. пат. №147155 U1, МПК B25J 15/06, опубл. 27.10.2014, Бюл. №30, Сысоев C.H., Литвинов И.С., Юнцзе Цао. «Захватный корректирующий модуль»), которое используется для установки изделия типа «втулка» на изделие типа «вал». Данное устройство устанавливает втулку на вал. Устройство содержит корпус с приводом линейного перемещения захвата, закрепленным на подвижном рабочем органе привода с возможностью перекоса и подпружиненным относительно среднего положения. Между захватом и подвижным рабочим органом последовательно установлены два рычага, закрепленные с возможностью перекоса и подпружиненными относительно среднего положения. При этом длина рычага, закрепленного на подвижном рабочем органе, меньше рычага, соединенного с захватом.
Однако использование данного устройства возможно только для ситуации перемещения втулки относительно вала, что ограничивает область его применения.
Наиболее близким по технической сущности из известных устройств является захватный корректирующий модуль (см. пат. RU №129044 С2, МПК B25J 15/06 «Захватный корректирующий модуль» заявка №2012157839/02, заявл. 27.12.12 г., опубл. 20.06.13, Бюл. №17, Сысоев C.H., Корегин А.Н., Осипов В.А., Претека Н.В.). Объектом сопряжения изделия является механическая рука с установленными на ее корпусе направляющими элементами. Захват с приводом его перемещения закреплен на подвижном рабочем органе привода с возможностью перекоса и подпружинен относительно среднего положения, а между захватом и подвижным рабочим органом установлен механизм коррекции, который выполнен в виде упругого гибкого стержня с возможностью изгиба при силовом взаимодействии изделия с направляющими элементами в процессе его подъема. При силовом взаимодействии изделия с направляющими выполняется коррекция его положения относительно корпуса.
В устройстве увеличена зона возможного корректирующего смещения положения изделия в захватном модуле, однако оно не может осуществлять сборку изделий типа вал-втулка с коррекцией их взаимного расположения.
Таким образом, данное устройство и все известные имеют ограниченную область применения.
Задачей изобретения является расширение области применения захватного корректирующего модуля путем дополнительного использования его для выполнения сборочных операций.
Поставленная задача достигается тем, что в захватном корректирующем модуле, включающем корпус с приводом перемещения сопрягаемого изделия захватом, установленным на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения, механизм коррекции положения изделия относительно объекта сопряжения, установленный между подвижным рабочим органом и захватом, выполненный в виде упругого гибкого стержня с возможностью изгиба при силовом взаимодействии изделия с объектом сопряжения, на гибком стержне закреплена втулка, длиной, меньшей длины стержня, и установленная с возможностью регулировки ее положения вдоль стержня.
Пример реализации показан на чертежах.
Этапы работы устройства при установке вала в отверстие втулки показаны на фиг. 1, поз. а, б, в, г, д. Устройство (фиг. 1, поз. а) состоит из корпуса 1 с приводом линейного перемещения рабочего органа 2, на котором закреплен захват 3 с сопрягаемым изделием 4 для установки в отверстие втулки 5, установленной на рабочей поверхности 6. Захват соединен с рабочим органом через упругий гибкий стержень 7, на котором закреплена втулка 8. Перед началом работы втулку 8 устанавливают в положение выше середины длины гибкого вала.
Устройство работает следующим образом.
Перемещение рабочего органа вниз (фиг. 1, поз. б) приводит к перемещению сопрягаемого изделия 4 в направлении втулки 5. Так как положение изделия смещено относительно требуемого на величину А, то силовое его взаимодействие с торцевой поверхностью втулки приводит к перекосу изделия в направлении требуемой коррекции его положения. Изгибаются части гибкого стержня, расположенные по обе стороны втулки. А так как нижняя часть длиннее верхней, то втулка 8 наклоняется в направлении, противоположном направлению перекоса сопрягаемого изделия 4. Дальнейшее перемещение рабочего органа приводит к увеличению угла наклона втулки и возникновению силового воздействия на изделие 4 в направлении требуемого перемещения для коррекции его положения (фиг. 1, поз. в). Устройство смещает изделие вправо, корректируя его положение (фиг. 1, поз. г). Операция заканчивается установкой сопрягаемого изделия 4 в отверстие объекта сопряжения 5 (фиг. 1, поз. д).
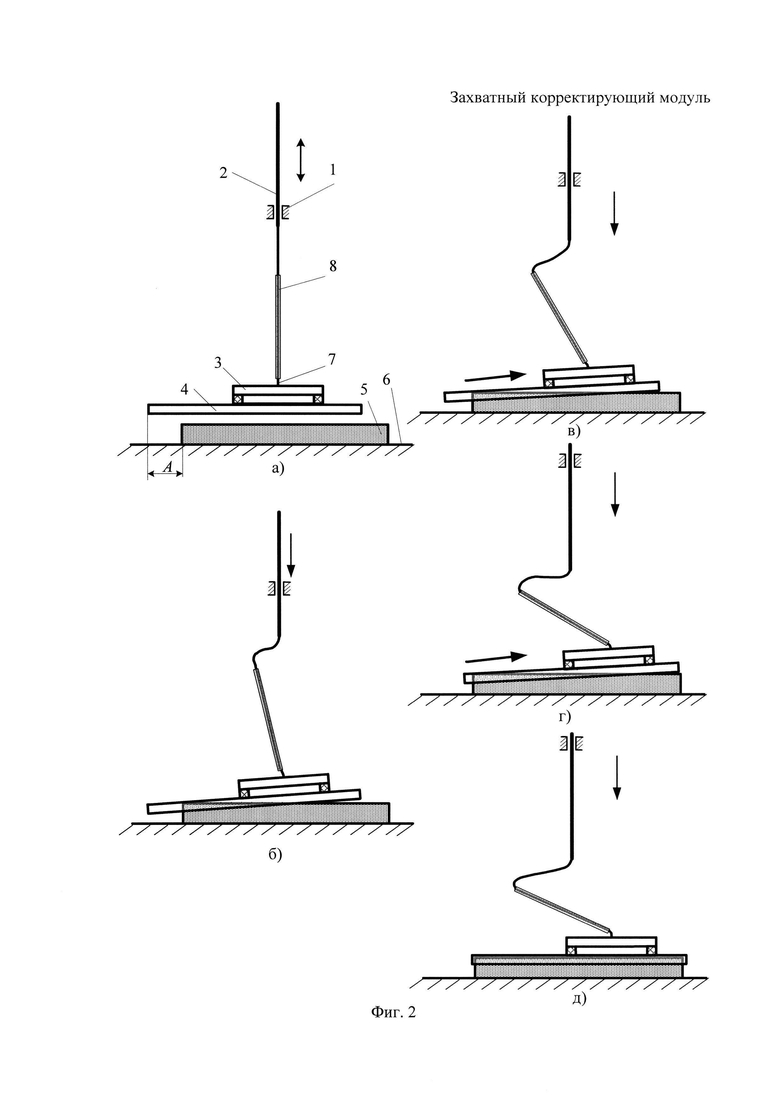
Этапы работы устройства при установке втулки на вал показаны на фиг. 2, поз. а, б, в, г, д.
В данном варианте манипулируют изделием типа «втулка», а объектом сопряжения является изделие типа «вал».
Перед началом работы втулку 8 устанавливают в положение ниже середины длины гибкого вала (фиг. 2, поз. а).
Устройство работает следующим образом.
Перемещение рабочего органа вниз (фиг. 2, поз. б) приводит к перемещению сопрягаемого изделия в направлении вала 5. Так как положение сопрягаемого изделия смещено относительно требуемого на величину А, то его силовое взаимодействие с торцевой поверхностью вала приводит к перекосу изделия в направлении, противоположном требуемой коррекции его положения. Изгибаются части гибкого стержня, расположенные по обе стороны втулки. Так как нижняя часть короче верхней, то втулка 8 наклоняется в направлении, совпадающем направлению перекоса сопрягаемого изделия 4. Дальнейшее перемещение рабочего органа приводит к увеличению угла наклона втулки и возникновению силового воздействия на изделие в направлении требуемого перемещения изделия для коррекции его положения (фиг. 2, поз. в). Устройство смещает изделие вправо, корректируя его положение (фиг. 2, поз. г). Операция заканчивается установкой сопрягаемого изделия 4 на объект сопряжения 5 (фиг. 2, поз. д).
Данное техническое решение расширяет область применения устройства за счет дополнительной возможности сборки осесимметричных изделий типа вал-втулка при манипулировании положением как вала, так и втулки.
В лаборатории кафедры автоматизации технологических процессов Владимирского государственного университета имени Александра Григорьевича и Николая Григорьевича Столетовых проводились макетирование и натурные испытания предлагаемого устройства.
Исследования подтвердили расширение области применения устройства, его эффективность и промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватный корректирующий модуль | 2017 |
|
RU2657672C1 |
| Захватный корректирующий модуль | 2017 |
|
RU2668241C1 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749544C1 |
| Способ сборки деталей типа вал-втулка | 2015 |
|
RU2638089C2 |
| Электромагнитный захватный агрегатный модуль | 2016 |
|
RU2622069C1 |
| Вакуумный захватный агрегатный модуль | 2018 |
|
RU2691155C1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| Привод криволинейного перемещения | 2020 |
|
RU2736902C1 |
| Привод криволинейного перемещения | 2019 |
|
RU2722200C1 |

Изобретение относится к области машиностроения, роботостроения и может использоваться для коррекции положения преимущественно плоских изделий при их захвате из стандартной тары вакуумными и электромагнитными захватами. Захватный корректирующий модуль включает корпус с приводом перемещения сопрягаемого изделия захватом, установленным на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения, механизм коррекции положения изделия относительно объекта сопряжения, установленный между подвижным рабочим органом и захватом, выполненный в виде упругого гибкого стержня с возможностью изгиба при силовом взаимодействии изделия с объектом сопряжения. На гибком стержне закреплена втулка, длина которой меньше длины стержня и которая установлена с возможностью регулировки ее положения вдоль стержня. Изобретение расширяет область применения устройства за счет дополнительной возможности сборки осесимметричных изделий типа вал-втулка при манипулировании положением как вала, так и втулки. 2 ил.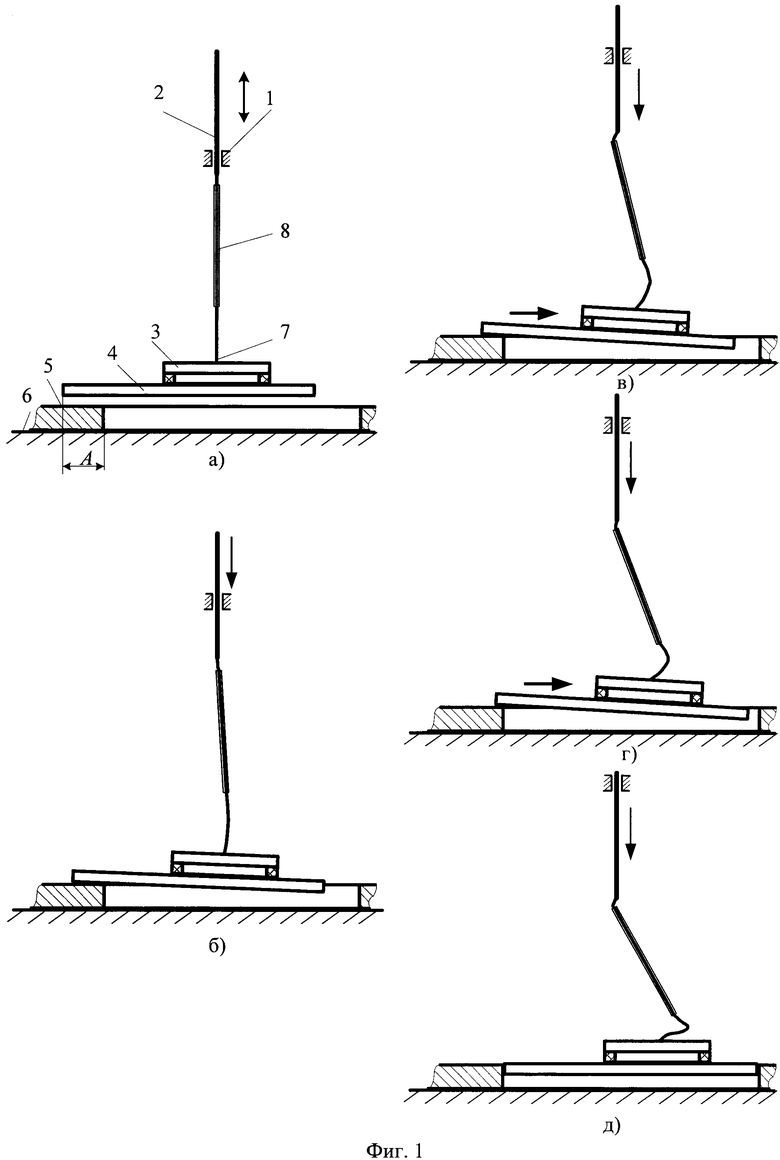
Захватный корректирующий модуль, включающий корпус с приводом перемещения сопрягаемого изделия захватом, установленным на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения, механизм коррекции положения изделия относительно объекта сопряжения, установленный между подвижным рабочим органом и захватом, выполненный в виде упругого гибкого стержня с возможностью изгиба при силовом взаимодействии изделия с объектом сопряжения, отличающийся тем, что на гибком стержне закреплена втулка с возможностью регулировки ее положения вдоль стержня, длина которой меньше длины стержня.
| Прибор для измерения величины волнового давления | 1959 |
|
SU129044A1 |
| Способ определения штампуемости листовых металлов | 1958 |
|
SU115711A1 |
| Мокрый газгольдер высокого давления | 1960 |
|
SU147155A1 |
| WO 1996030169 A1, 03.10.1996. | |||

