Изобретение относится к ракетно-космической технике и может быть использовано для управления движением жидкостного разгонного блока (РБ) и верхних ступеней ракет-носителей (РН) на безатмосферных участках полета во время работы маршевой двигательной установки с использованием отклонения маршевого двигателя относительно корпуса РБ (РН).
Известен способ [1] стабилизации жидкостного осциллятора, состоящий в установке необходимого количества демпфирующих перегородок в бак, приводящий к невозможности возникновения неустойчивого жидкостного осциллятора. Однако при этом ухудшаются энерго-массовые характеристики РБ (РН) и увеличивается стоимость его изготовления. В результате конструктивный способ решения задачи стабилизации не рационален.
В космической технике применяется традиционный амплитудный способ [1] стабилизации неустойчивых жидкостных осцилляторов и известны два предложенных в литературе фазовых метода стабилизации выбранных в качестве аналогов:
- Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей использование традиционного автомата стабилизации создающего фазовое опережение на частотах жидкостных осцилляторов, не обеспечивающего устойчивости «в малом», но, за счет нелинейного демпфирования в баке, обеспечивающего техническую устойчивость «в большом» (колебательный режим движения с допустимой амплитудой) [1];
- Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с добавлением к традиционному автомату стабилизации обратной связи по текущей координате неустойчивого осциллятора для переноса соответствующего корня характеристического уравнения в область устойчивости [2].
В качестве прототипа выбран способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с помощью маршевого или управляющих двигателей, заключающийся в измерении параметров движения ракеты-носителя, применении традиционного алгоритма стабилизации, добавление алгоритма основанного на использовании априорных данных о динамических свойствах ракеты-носителя путем использования так называемых резонансных фильтров, выделяющих частотный диапазон вокруг собственной частоты, соответствующей неустойчивому осциллятору с последующим созданием в этом диапазоне необходимого сигнала для его фазовой стабилизации [3].
Сведения о практической реализации второго аналога и прототипа отсутствуют.
Первый аналог не обеспечивает асимптотической устойчивости и приводит к уменьшению запасов управляемости из-за загрузки органов управления колебательными перемещениями на частоте неустойчивого осциллятора. Также, обуславливает наличие вынужденных колебаний устойчивых осцилляторов, в том числе из расходуемых баков, что особенно опасно перед выключением маршевой двигательной установки. Допустимый уровень колебаний, часто, может быть получен только при совместном использовании с демпфирующими устройствами внутри бака с вытекающими уже описанными недостатками.
Второй аналог свободен от недостатков первого аналога, однако, имеет свои. Главный недостаток состоит в отсутствии прямого измерения колебаний жидкости в баке. Датчики, если их установить в баке, усложнят конструкцию РБ (РН), увеличат ее стоимость и уменьшат надежность. Предлагаемое косвенное оценивание параметров колебаний в баке не обладает свойством сходимости к истинному значению.
Прототип свободен от недостатков первого и второго аналогов, однако имеет присущие ему недостатки, а именно:
- узкополосный частотный диапазон резонансного звена требует точных априорных знаний параметров неустойчивого осциллятора. Не малое (выходящее за пределы допустимого диапазона) отклонение тяги двигателя или неточность оценки частоты осциллятора приведет к неработоспособности всего алгоритма стабилизации;
- не проверена работоспособность предлагаемого способа в условиях имеющихся помех в оценках вторых производных параметров движения, поступающих на узкополосные резонансные звенья из-за помех дискретизации и других.
Задачей предлагаемого изобретения является обеспечение асимптотической устойчивости жидкостных осцилляторов.
Указанная задача выполняется за счет того, что в способе стабилизации структурно неустойчивых осциляторов жидкости разгонных блоков и верхних ступеней ракет-носителей, заключающемся в измерении параметров движения, применении алгоритма стабилизации, основанного на использовании априорных данных о динамических свойствах разгонного блока и верхней ступени ракеты-носителя, и отклонении управляющего двигателя от начального положения, согласно изобретению, в алгоритме стабилизации используется наблюдатель состояния неустойчивого осциллятора обеспечивающий сходимость оценок к наблюдаемым координате и скорости за заданное время, редуцированный до вида динамического звена второго порядка, нечувствительного к технологическим возмущениям и заданным отклонениям параметров неустойчивого осциллятора.
Таким образом, в управлении используется наблюдатель за динамикой РБ (РН), обеспечивающий получение оценки динамики жидкостного осциллятора без использования дополнительных датчиков колебаний жидкости внутри бака.
Предлагаемое изобретение способа стабилизации структурно неустойчивого осциллятора жидкости РБ (РН) свободно от недостатков всех прототипов за счет использования в алгоритме стабилизации наблюдателя колебаний неустойчивого осциллятора в форме передаточных функций и создания отрицательной обратной связи по его координате и скорости.
Наблюдатель обладает свойством сходимости оцениваемых координаты и скорости неустойчивого осциллятора к его истинному движению при условии устойчивости других имеющихся осцилляторов. Наблюдатель является редуцированным для уменьшения его размерности и преобразован к традиционной для автоматов стабилизации форме передаточных функций второго порядка.
Исходная математическая модель, содержащаяся в нередуцированном наблюдателе, имеет нетрадиционную форму механического аналога движения твердого тела с подвижной жидкостью в баках. Исходные данные, используемые для синтеза наблюдателя, имеют следующие обозначения и физический смысл:
m - масса всего объекта,
m1 - подвижная масса жидкости,
Rψ - координата подвижной жидкости от центра масс невозмущенной системы,
j - момент инерции невозмущенной системы относительно своего центра масс,
 - длина маятника (в случае использования маятникового механического аналога),
- длина маятника (в случае использования маятникового механического аналога),
z - отклонение центра масс невозмущенной системы от программной координаты,
ψ - угловое отклонение продольной оси объекта от программного направления,
rψ - отклонение подвижной массы от продольной оси объекта,
xT - координата центра масс невозмущенной системы,
xT - хв плечо от центра масс до точки приложения управляющей силы,
 - поперечная управляющая сила (δψ - командный сигнал),
- поперечная управляющая сила (δψ - командный сигнал),
 - продольное ускорение объекта (Fx - суммарная продольная сила).
- продольное ускорение объекта (Fx - суммарная продольная сила).
Алгоритм наблюдателя представлен в формуле (1)

Где:
s - обобщенная координата осциллятора;
 - оценка координаты неустойчивого осциллятора (м);
- оценка координаты неустойчивого осциллятора (м);
 - оценка скорости неустойчивого осциллятора (м/с);
- оценка скорости неустойчивого осциллятора (м/с);
 - угловое ускорение измеренное гироприбором (1/с2);
- угловое ускорение измеренное гироприбором (1/с2);
 - боковое ускорение точки соответствующей центру масс невозмущенной системы (м/с2), получаемое по формуле
- боковое ускорение точки соответствующей центру масс невозмущенной системы (м/с2), получаемое по формуле  - боковое ускорение точки установки гироприбора и его координата).
- боковое ускорение точки установки гироприбора и его координата).
Передаточные функции в (1) имеют вид представленный в формулах (2).
Где: ω0 - параметр, характеризующий сходимость оценки к оцениваемой величине (корень передаточной функции наблюдателя, должен быть отрицательным вещественным числом).
Коэффициенты передаточных функций в (2) есть функции времени, определяемые по формулам (3), где коэффициенты усиления наблюдателя  в свою очередь зависят от времени и определяются по формулам (4).
в свою очередь зависят от времени и определяются по формулам (4).
Расчеты по формулам (3) и (4) ведутся при подготовке полетного задания. Наблюдатель по формулам (1) и (2) может быть реализован на борту в любой форме, включая аналоговую, вследствие простоты передаточных функций.
Алгоритм стабилизации, учитывающий оценки параметров движения неустойчивого осциллятора имеет вид (5).

Коэффициенты в (5) выбираются традиционными частотными методами, так как, форма наблюдателя является естественной для их использования.
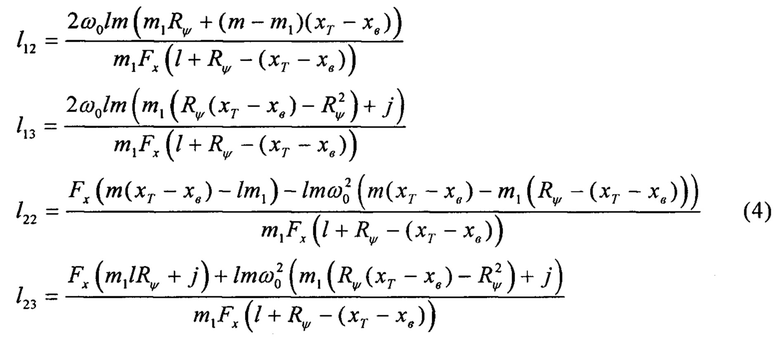
Результаты с использованием предлагаемого способа управления для гипотетического разгонного блока приведены на фиг. 1-4. Параметры гипотетического РБ приняты близкими к существующим и проектируемым жидкостным РБ при учете колеблющегося окислителя в баке, расположенном ниже центра масс и неустойчивого осциллятора горючего находящегося выше центра масс.
На фиг. 1 показан годограф АФЧХ разомкнутой системы угловой стабилизации с традиционным алгоритмом, не обеспечивающим асимптотическую устойчивость.
На фиг. 2 показан годограф АФЧХ разомкнутой системы угловой стабилизации с использованием наблюдателя в форме передаточных функций.
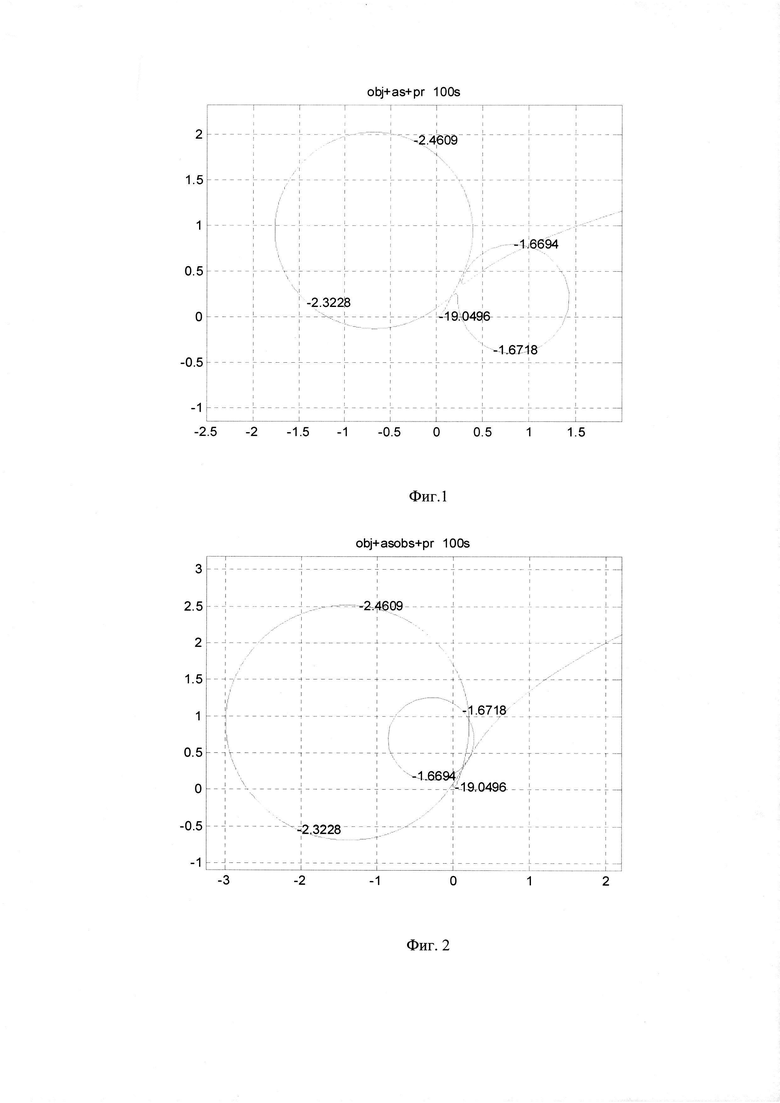
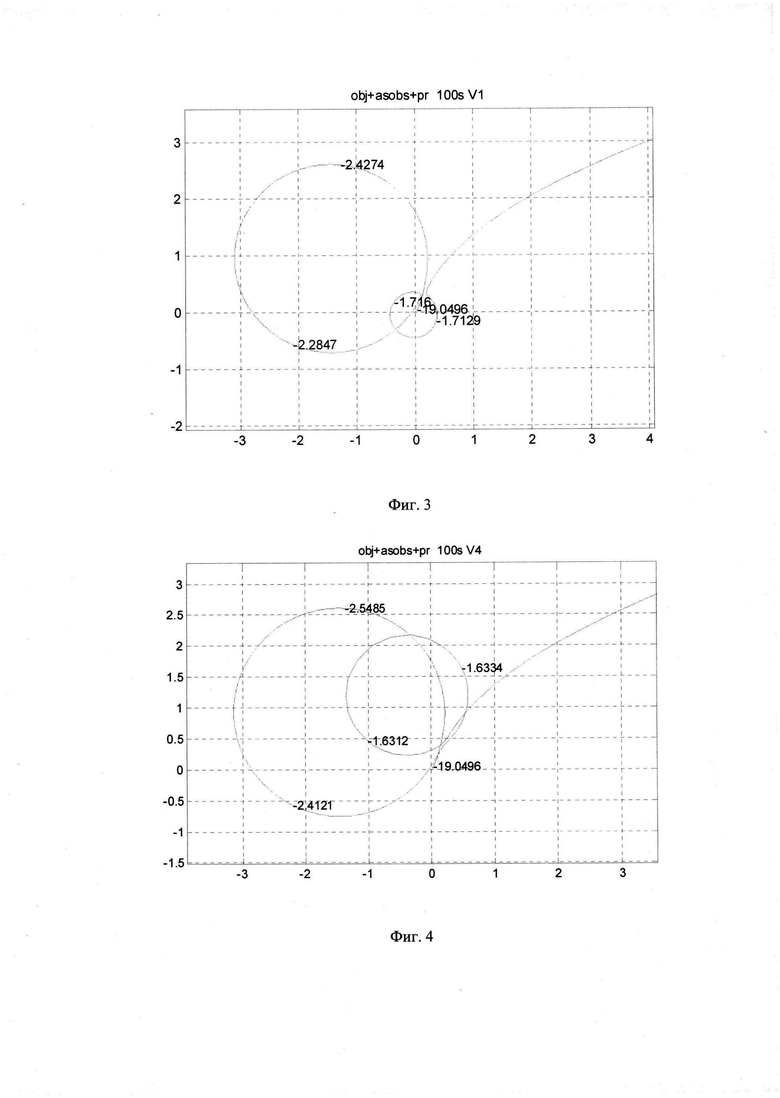
Для проверки надежности технического результата предлагаемого изобретения были проведены расчеты АФЧХ системы стабилизации с неизменным наблюдателем при 5% варьировании параметров объекта наблюдения. На фиг. 3 и фиг. 4 приведены два из множества рассмотренных наборов возмущений параметров РБ наиболее отличающихся от изображенного на фиг. 2.
Из анализа годографов АФЧХ на фиг. 3 и фиг. 4 видно, что асимптотическая устойчивость обеспечивается с большим запасом.
Изобретение позволит обеспечить асимптотическую устойчивость жидкостных осцилляторов, для которых ранее обеспечивалась только техническая устойчивость (колебательный режим движения) или демпфирование с помощью специальных устройств (дополнительные конструкции внутри баков РБ (РН)).
Таким образом, заявлен способ стабилизации структурно неустойчивых осциляторов жидкости разгонных блоков и верхних ступеней ракет-носителей, заключающийся в измерении параметров движения, применении алгоритма стабилизации, основанного на использовании априорных данных о динамических свойствах разгонного блока и верхней ступени ракеты-носителя, и отклонении управляющего двигателя от начального положения. Отличительная особенность способа заключается в том, что в алгоритме стабилизации используется наблюдатель состояния неустойчивого осциллятора обеспечивающий сходимость оценок к наблюдаемым координате и скорости за заданное время, редуцированный до вида динамического звена второго порядка, нечувствительного к технологическим возмущениям и заданным отклонениям параметров неустойчивого осциллятора.
Техническим результатом изобретения является обеспечение асимптотической устойчивости жидкостных осцилляторов.
Источники информации:
1. К.С. Колесников. Динамика ракет. М.: «Машиностроение», 2003 г.
2. А.В. Бабин, А.И. Мытарев. Стабилизация структурно неустойчивых объектов РКТ с топливными баками на основе алгоритма с эталонной моделью. Космонавтика и ракетостроение, журнал №6 2015 г. стр. 136.
3. Патент на изобретение №2670328.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ СТРУКТУРНО НЕУСТОЙЧИВЫХ ОСЦИЛЛЯТОРОВ ЖИДКОСТИ РАКЕТ-НОСИТЕЛЕЙ | 2019 |
|
RU2722519C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА | 2018 |
|
RU2722628C2 |
| Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором | 2018 |
|
RU2670328C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2009 |
|
RU2408851C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ ПРОВЕДЕНИЯ ЛЁТНО-КОНСТРУКТОРСКИХ ИСПЫТАНИЙ БОРТОВОЙ СИСТЕМЫ ИСПАРЕНИЯ ОСТАТКОВ ЖИДКОГО ТОПЛИВА В БАКЕ ОТРАБОТАВШЕЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 2018 |
|
RU2690304C1 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| МАЛЫЙ РАЗГОННЫЙ БЛОК | 2023 |
|
RU2808312C1 |
| МАЛЫЙ РАЗГОННЫЙ БЛОК | 2024 |
|
RU2830531C1 |
Изобретение относится к управлению движением разгонного блока (РБ) и верхних ступеней (ВС) ракет-носителей (РН) во время работы маршевой жидкостной двигательной установки с отклоняемым двигателем. Отклонением маршевого двигателя реализуется программное движение РБ (ВС РН), его стабилизация, а также компенсация внешних и технологических возмущений. Для стабилизации структурно неустойчивых осцилляторов (НО) жидкости РБ (ВС РН) измеряют параметры движения и применяют алгоритм стабилизации, основанный на использовании априорных данных о динамических свойствах РБ (ВС РН). При этом в данном алгоритме используется наблюдатель состояния НО, обеспечивающий сходимость оценок к наблюдаемым координате и скорости за заданное время. Наблюдатель редуцирован до вида динамического звена второго порядка, нечувствительного к технологическим возмущениям и заданным отклонениям параметров НО. Техническим результатом изобретения является обеспечение асимптотической устойчивости жидкостных осцилляторов. 4 ил.
Способ стабилизации структурно неустойчивого осциллятора жидкости разгонных блоков и верхних ступеней ракет-носителей, заключающийся в измерении параметров движения, применении алгоритма стабилизации, основанного на использовании априорных данных о динамических свойствах разгонного блока и верхней ступени ракеты-носителя, и отклонении управляющего двигателя от начального положения, отличающийся тем, что в алгоритме стабилизации используется наблюдатель состояния неустойчивого осциллятора, обеспечивающий сходимость оценок к наблюдаемым координате и скорости за заданное время, редуцированный до вида динамического звена второго порядка, нечувствительного к технологическим возмущениям и заданным отклонениям параметров неустойчивого осциллятора.
| Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором | 2018 |
|
RU2670328C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА | 2013 |
|
RU2541576C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| US 5426720 A, 20.06.1995 | |||
| US 5517418 A, 14.05.1996. | |||

