Изобретение относится к области проектирования систем управления летательными аппаратами (ЛА) и может быть использовано системой управления в устройстве пропорционально-интегрально-
дифференцирующего (ПИД)-регулятора автомата стабилизации для стабилизации движения летательного аппарата в случаях структурной неустойчивости колебаний жидкого наполнителя в топливных баках.
Из уровня техники известно 7 основных подходов (способов) решения задачи стабилизации движения летательного аппарата со структурно неустойчивым осциллятором, являющиеся аналогами данного изобретения [1, 2]. Такими способами являются следующие:
1. Способ стабилизации летательного аппарата со структурной неустойчивостью колебаний жидкого наполнителя в топливных баках путем выбора фазовой характеристики автомата стабилизации по параметрам состояния объекта (Колесников К.С., «Жидкостная ракета как объект регулирования», М.: «Машиностроение», 1969).
2. Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором, заключающийся в обеспечении автоматом стабилизации амплитудной стабилизации (Колесников К.С., Жидкостная ракета как объект регулирования, М.: «Машиностроение», 1969).
3. Конструктивный способ решения задачи стабилизации летательного аппарата со структурно неустойчивым осциллятором, заключающийся в установке дополнительных устройств в виде поплавков на свободную поверхность жидкости в топливном баке для увеличения рассеяния энергии (Колесников К.С., Жидкостная ракета как объект регулирования, М.: «Машиностроение», 1969).
4. Конструктивный способ решения задачи стабилизации летательного аппарата со структурно неустойчивым осциллятором, заключающийся в изменении геометрии топливного бака и уровня заполнения жидкости для уменьшения приведенной массы и ослабления суммарного динамического эффекта от колебаний жидкости (Колесников К.С., Жидкостная ракета как объект регулирования, М.: «Машиностроение», 1969).
5. Конструктивный способ решения задачи стабилизации летательного аппарата со структурно неустойчивым осциллятором, заключающийся в изменении частоты собственных колебаний жидкости (Колесников К.С., Жидкостная ракета как объект регулирования, М.: «Машиностроение», 1969).
6. Способ стабилизации структурно неустойчивых объектов с топливными баками на основе алгоритма с эталонной моделью (Бабин А.В., Мытарев А.И., статья «Стабилизация структурно неустойчивых объектов ракетно-космической техники с топливными баками на основе алгоритма с эталонной моделью», журнал «Космонавтика и ракетостроение», вып.6 (85), 2015).
7. Способ стабилизации при собственной динамической неустойчивости летательного аппарата, заключающийся в установке демпфирующих перегородок в топливные баки (Бужинский В.А., Новоселецкий Д.В., статья «О стабилизации движения верхних ступеней ракет-носителей при собственной динамической их неустойчивости», журнал «Космонавтика и ракетостроение», вып.4 (97), 2017).
Реализация предлагаемых конструктивных способов решения задачи стабилизации движения летательного аппарата со структурно неустойчивым осциллятором приводит к изменениям конструкции топливных баков и дополнительным весовым затратам. Увеличение частоты собственных колебаний жидкости и связанное с эти изменение частоты системы может затруднить фазовую стабилизацию. Поэтому в результате изменения геометрии баков оптимальные результаты достигаются не всегда.
Наиболее близким по технической сущности к предлагаемому изобретению в части функционального предназначения (прототипом) выбрано техническое решение «Способ стабилизации летательного аппарата со структурной неустойчивостью колебаний жидкого наполнителя в топливных баках путем выбора фазовой характеристики автомата стабилизации по параметрам состояния объекта», представленное в книге Колесникова К.С., «Жидкостная ракета как объект регулирования», М.: «Машиностроение», 1969.
Технический результат прототипа заключается в том, что стабилизация движения летательного аппарата со структурно неустойчивым осциллятором осуществляется управляющим воздействием, вырабатываемым ПИД-регулятором по параметрам состояния летательного аппарата.
Недостатком прототипа является то, что при наличии близких характерных частот обеспечение стабилизации может оказаться невозможным, так как на одной частоте от автомата стабилизации может потребоваться опережение по фазе, а на другой близкой частоте - запаздывание.
Общим существенным признаком исследуемого решения и прототипа является выбор фазовой характеристики автомата стабилизации для обеспечения устойчивости движения летательного аппарата.
Техническим эффектом заявляемого «Способа стабилизации движения летательного аппарата со структурно неустойчивым осциллятором» является создание стабилизирующего управляющего сигнала на исполнительные органы летательного аппарата, создаваемого ПИД-регулятором совместно с дополнительным параллельным контуром системы управления, который основан на эффекте резонанса.
К существенным признакам, отличающим от прототипа исследуемое техническое решение, принятое в заявляемом изобретении, относятся: ввод дополнительного контура управления, который подключен параллельно ПИД-регулятору автомата стабилизации; ввод гармонического сигнала, включающего параметры следующих значений: противоположной фазы, превосходящей амплитуды по отношению к фазе и амплитуды колебаний выходного сигнала ПИД-регулятора на частоте собственных колебаний структурно неустойчивого осциллятора.
Для реализации способа необходимо в процессе движения летательного аппарата определять фазу и амплитуду управляющего сигнала на частоте структурно неустойчивого осциллятора, что может быть выполнено с помощью различных устройств: аналоговых или цифровых фильтров, эталонных моделей, нечетких логических устройств, анализаторов и др.
Заявляемый способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором поясняют следующие фигуры:
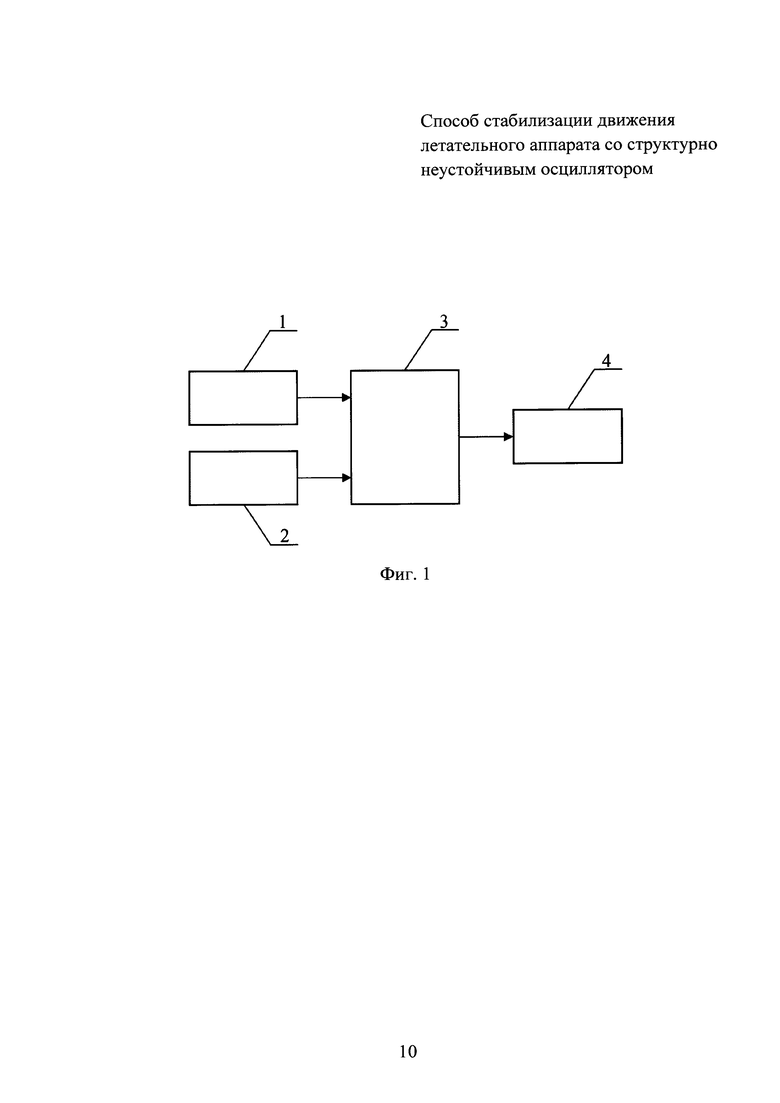
- на фиг. 1 показана традиционная структура автомата стабилизации (прототип);
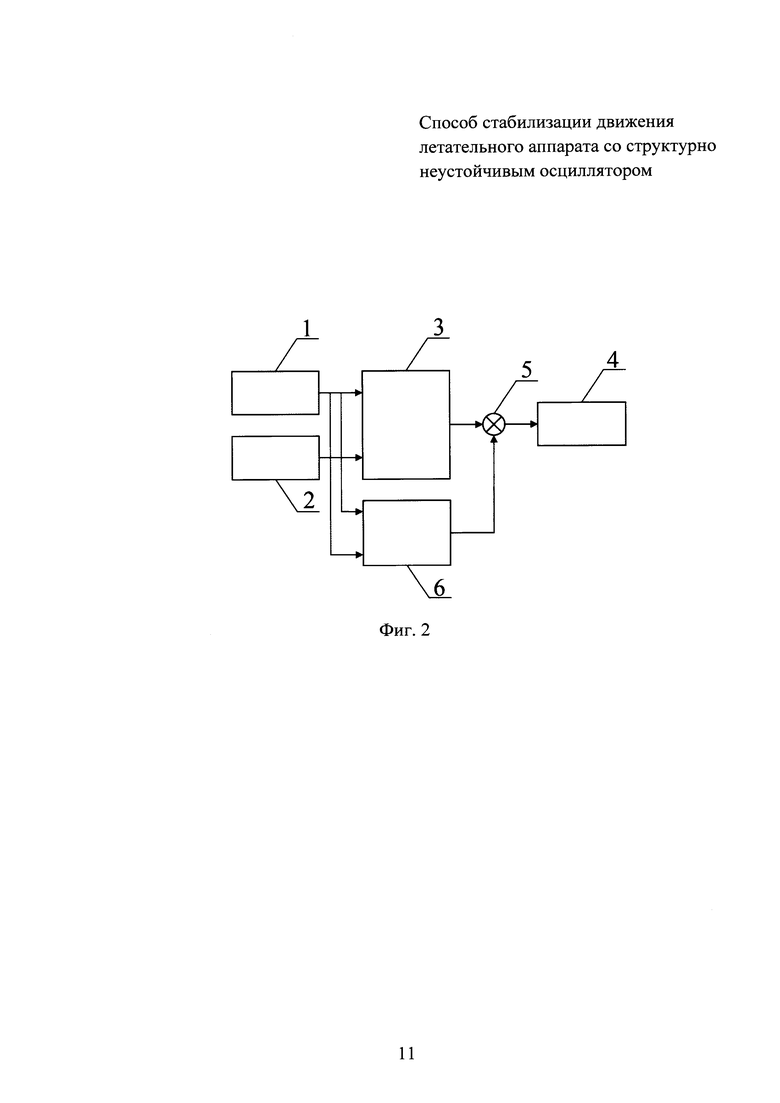
- на фиг. 2 показана структура автомата стабилизации с введенным резонансным фильтром на частоте структурно неустойчивого осциллятора;
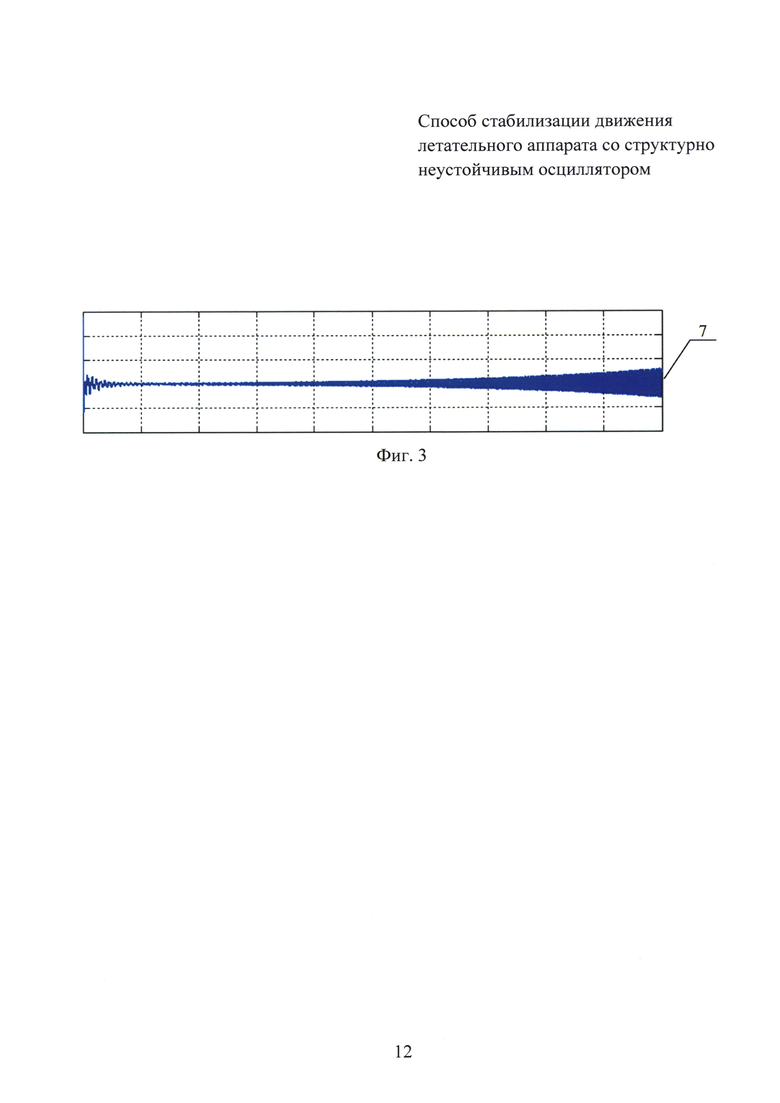
- на фиг. 3 показан неустойчивый переходной процесс по отклонению рулей для замкнутой системы;
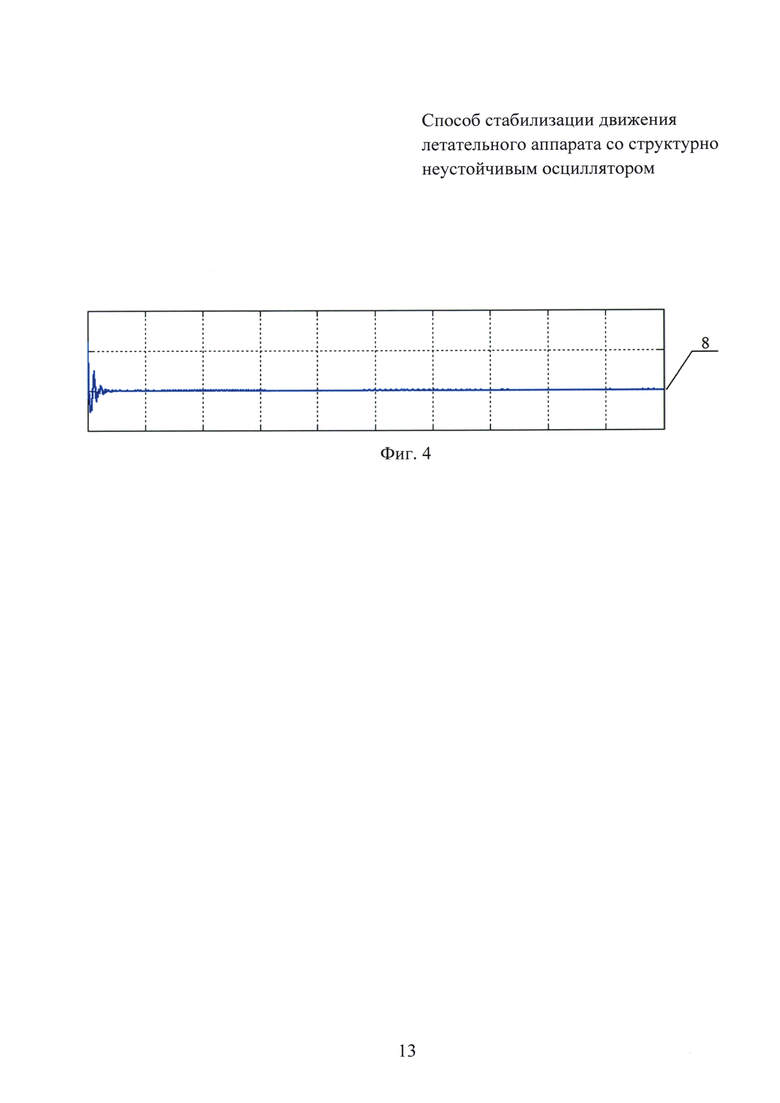
- на фиг. 4 показан устойчивый переходной процесс по отклонению рулей для замкнутой системы, в которой к традиционному автомату стабилизации на основе ПИД-регулятора параллельно подключен резонансный фильтр.
На фигурах приняты следующие обозначения:
1 - выходной сигнал летательного аппарата по угловому положению;
2 - выходной сигнал летательного аппарата по кажущейся скорости;
3 - ПИД-регулятор;
4 -управляющий сигнал на исполнительные органы летательного аппарата;
5 - сумматор;
6 - резонансный фильтр;
7 - неустойчивый переходной процесс;
8 - устойчивый переходной процесс.
Для решения вопроса обеспечения устойчивости структурно неустойчивых колебаний средствами алгоритмов системы управления предлагается использовать эффект резонанса и организовать его между искусственно веденным в систему управления колебательным контуром и колебаниями структурно неустойчивого осциллятора.
Для фазовой стабилизации структурно неустойчивого тона колебаний жидкого наполнителя ЛА в традиционную структуру автомата стабилизации (фиг. 1) предлагается ввести резонансный фильтр 6 на частоте структурно неустойчивого осциллятора (фиг. 2). Подключив резонансный фильтр 6 параллельно ПИД-регулятору 3, подав на его вход выходные сигналы летательного аппарата по угловому положению 1 и кажущейся скорости 2, проведя фазовую коррекцию с помощью дифференцирующего звена и сложив с помощью сумматора 5 с сигналом от ПИД-регулятора 3, получим управляющий сигнал на исполнительные органы летательного аппарата 4 в контуре стабилизации структурно неустойчивого осциллятора на основе использования резонансного фильтра в автомате стабилизации ЛА (фиг. 2). ПИД-регулятор 3, который получает выходные сигналы летательного аппарата по угловому положению 1 и кажущейся скорости 2 с дополнительным контуром управления в виде резонансного фильтра осуществляет стабилизацию движения ЛА со структурно неустойчивым осциллятором. Контур ПИД-регулятора 3 обеспечивает выработку сигнала управления с требуемым качеством движением ЛА как твердого тела, при этом вследствие структурной неустойчивости на его выходе наблюдаются колебания на частоте СНО. Одновременно по параллельному контуру резонансный фильтр 6 выделяет колебания на частоте структурно неустойчивого осциллятора и, благодаря достаточной добротности, подавляет сигналы на других частотах. Далее колебания на частоте структурно неустойчивого осциллятора получают фазовую коррекцию. На сумматоре 5 сигналы на частоте структурно неустойчивого осциллятора складываются в противофазе так, что обеспечивается отрицательная обратная связь всей системы на частоте структурно неустойчивого осциллятора, и суммарное движение становится устойчивым. Параметры резонансного фильтра 6 обеспечивают получение на его выходе колебания, синфазные с колебаниями структурно неустойчивого осциллятора, которые использованы в резонансном фильтре 6 для создания стабилизирующего сигнала, подаваемого на сумматор 5 (фиг. 2). Полученный результат 8 удовлетворяет основным требованиям по качеству процессов регулирования ЛА (фиг. 4).
Способ решает задачу стабилизации структурно неустойчивого осциллятора ЛА системой управления движением. Ее решение основывается на использовании для стабилизации структурно неустойчивого осциллятора способа формирования управляющего воздействия, отличающегося тем, что управляющее воздействие дополняют гармоническим сигналом, который должен удовлетворять двум требованиям - противоположной фазы и превосходящей амплитуды по отношению к фазе и амплитуде колебаний выходного сигнала ПИД-регулятора на частоте собственных колебаний СНО.
Кроме частотного анализа действие устройства было изучено путем моделирования процесса управления с подключением устройства к ПИД-регулятору автомата стабилизации (наблюдаемый параметр - угол поворота органа управления вектором тяги) при отсутствии (фиг. 3) и при введении дополнительного контура управления (фиг. 4). Таким образом, использование заявляемого способа обеспечило устойчивость при наличии в ЛА структурно неустойчивого осциллятора.
Для исследований были составлены математические модели исследования устойчивости системы с резонансным фильтром методом математического моделирования и частотным методом Найквиста.
Эффективность ввода в состав традиционного автомата стабилизации предлагаемого дополнительного резонансного фильтра оценена для типового ЛА со структурной неустойчивостью колебаний жидкого наполнителя для которого был построен автомат стабилизации на основе традиционного ПИД-регулятора, удовлетворяющий основным требованиям по качеству процессов регулирования. Затем, дополнительно к традиционному автомату стабилизации, был подключен резонансный фильтр с имитацией входа, близкого к входу на структурно неустойчивый осциллятор. Соответствующий выбор параметров резонансного фильтра обеспечил получение на его выходе синфазных со структурно неустойчивым осциллятором колебаний, которые использованы в резонансном фильтре для создания стабилизирующего сигнала, подаваемого на сумматор.
Как показали исследования, подключение контура резонансного фильтра в контур автомата стабилизации позволило увеличить область устойчивости и выбрать рабочие настройки, исходя из требований к качеству переходных процессов и запасов устойчивости по критерию Найквиста.
Технический эффект от использования способа заключается в повышении запасов устойчивости и качества движения летательного аппарата с жидким топливом в баках средствами системы управления, повышении надежности работы системы управления, уменьшении вероятности нештатной ситуации системы управления, связанной со структурной неустойчивостью, исключении колебательных движений летательного аппарата и связанных с ними колебаний маршевой двигательной установки, рулевых приводов, дополнительных нагрузок на корпус и выводимую полезную нагрузку.
Экономическая эффективность от использования способа заключается в экономии весовых затрат на установку конструктивных демпферов в топливных баках, неэффективных затрат топлива двигательной установки в поперечном к движению направлении, затрат на энергетику рулевых приводов, снижении веса конструкции летательного аппарата из-за отсутствия необходимости упрочнять ее на дополнительные деформации.
Предложено для обеспечения асимптотической устойчивости движения ЛА со структурно неустойчивым осциллятором параллельно к традиционному ПИД-регулятору автомата стабилизации ввести параллельный дополнительный контур управления в виде резонансного фильтра на частоте структурно неустойчивого осциллятора, при этом выбор фазы выходного сигнала резонансного фильтра используется как способ стабилизации ЛА со структурно неустойчивыми осцилляторами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ СТРУКТУРНО НЕУСТОЙЧИВЫХ ОСЦИЛЛЯТОРОВ ЖИДКОСТИ РАКЕТ-НОСИТЕЛЕЙ | 2019 |
|
RU2722519C1 |
| СПОСОБ СТАБИЛИЗАЦИИ СТРУКТУРНО НЕУСТОЙЧИВОГО ОСЦИЛЛЯТОРА ЖИДКОСТИ РАЗГОННЫХ БЛОКОВ И ВЕРХНИХ СТУПЕНЕЙ РАКЕТ-НОСИТЕЛЕЙ | 2019 |
|
RU2722399C1 |
| СПОСОБ ВЫСОКОТОЧНОГО И ДИНАМИЧНОГО УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА (МОРСКИЕ И РЕЧНЫЕ СУДА, ЛЕТАТЕЛЬНЫЕ АППАРАТЫ, УПРАВЛЯЕМЫЕ РАКЕТЫ) | 2009 |
|
RU2403610C1 |
| СПОСОБ СТАБИЛИЗАЦИИ СЛАБОДЕМПФИРОВАННОГО НЕУСТОЙЧИВОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581787C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С АВТОКОЛЕБАТЕЛЬНЫМ ПРИВОДОМ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ | 2010 |
|
RU2435131C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2023 |
|
RU2827861C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА | 2018 |
|
RU2722628C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2581894C1 |
| ТОПЛИВОЗАПРАВЩИК С ВОДООТДЕЛИТЕЛЕМ | 2008 |
|
RU2378165C1 |
Изобретение относится к области проектирования систем управления летательными аппаратами (ЛА), может быть использовано системой управления в устройстве пропорционально–интегрально-дифференцирующего регулятора автомата стабилизации движения для обеспечения устойчивости колебаний жидкого наполнителя в топливных баках. Строится параллельный контур управления с использованием резонансного фильтра высокой добротности на частоте структурно неустойчивого осциллятора. Выделяют гармонический сигнал, синфазный с колебаниями структурно неустойчивого осциллятора, который, путем его подключения к выходу автомата стабилизации ЛА, обеспечивает фазовую стабилизацию структурно неустойчивых колебаний жидкого наполнителя в топливном баке ЛА. Повышаются запасы устойчивости и качества движения ЛА с жидким топливом в баках средствами системы управления, повышается надежность работы системы управления, уменьшается вероятность нештатной ситуации системы управления. 4 ил.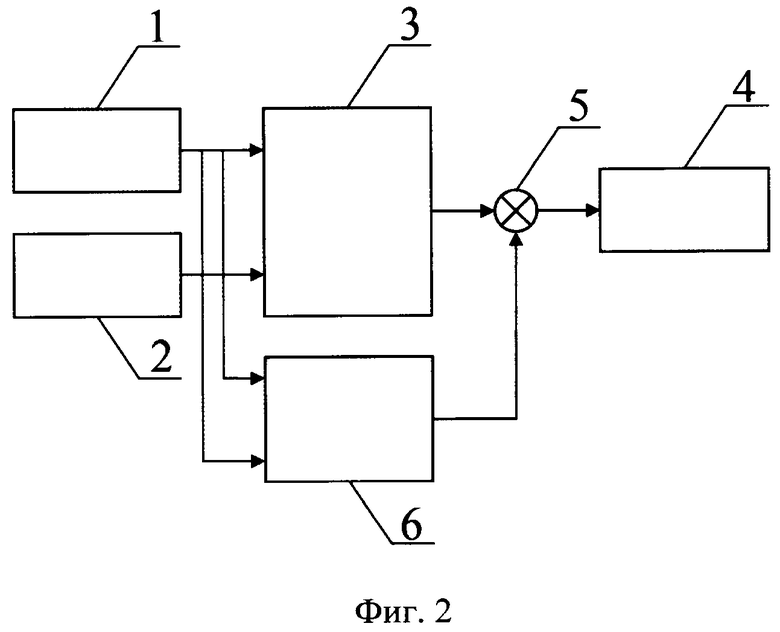
Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором, заключающийся в формировании управляющего воздействия, вырабатываемого пропорционально-интегрально-дифференцирующим регулятором системы управления по параметрам состояния летательного аппарата, отличающийся тем, что управляющее воздействие дополняют гармоническим сигналом с выполнением двух условий - противоположной фазы и превосходящей амплитуды по отношению к фазе и амплитуде колебаний выходного сигнала пропорционально-интегрально-дифференцирующего регулятора на частоте собственных колебаний структурно неустойчивого осциллятора.
| Колесников К.С | |||
| Жидкостная ракета как объект регулирования | |||
| - М.: "Машиностроение", 1969, стр | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Бабин А.В., Мытарев А.И | |||
| "Стабилизация структурно неустойчивых объектов ракетно-космической техники с топливными баками на основе алгоритма с эталонной моделью" | |||
| "Космонавтика и ракетостроение", N6(85), 2015, стр | |||
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| Бужинский В.А., Новоселецкий Д.В | |||
| "О стабилизации движения верхних ступеней ракет-носителей при собственной динамической их неустойчивости" | |||
| "Космонавтика и ракетостроение", N4(97), 2017, стр | |||
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |

