Предлагаемое изобретение относится к области, связанной с управлением движением разгонного блока (РБ) при выведении его на опорную орбиту после отделения от ракеты-носителя (РН).
Наиболее близким техническим решением является способ управления, применяемый в системе управления РБ, при котором после отделения РБ от РН стабилизируют продольную ось РБ относительно ее направления на момент отделения, считывают из полетного задания данные по параметрам управления и формируемой на доразгоне орбите РБ, в заданные в полетном задании времена от момента отделения РБ от РН включают на оговоренный в полетном задании интервал времени двигатели коррекции импульса (ДКИ) для поджатия топлива в баках РБ, запускают маршевый двигатель (МД), спустя фиксированный момент времени после запуска маршевого двигателя начинают отработку заданной в полетном задании программы ориентации РБ по тангажу, корректируют программу ориентации с помощью терминального управления и выключают маршевый двигатель [1].
Недостатком такого способа управления является тот факт, что угол тангажа РБ после отделения от РН может существенно отличатся от заданного в полетном задании значения начального угла тангажа программы изменения ориентации РБ на доразгоне. В результате этого ориентация тяги маршевого двигателя РБ после его включения не совпадает с расчетным направлением, определенным баллистическим расчетом для участка доразгона. Из-за нерасчетного начального направления тяги тратится время на ее переориентацию на направление, необходимое для формирования орбиты на участке доразгона, увеличивается длительность процесса формирования требуемой орбиты и повышается расход топлива на маневре.
Техническим результатом изобретения является снижение энергетических затрат РБ на доразгоне путем выполнения разворота РБ по тангажу после отделения от РН до достижения ориентации, определяемой величиной заданного в полетном задании начального угла программы изменения ориентации на доразгоне и стабилизации продольной оси РБ на этом угле до момента начала отработки заданной программы ориентации.
Указанный технический результат достигается тем, что в известный способ управления продольным движением РБ на участке доразгона, заключающийся в том, что после отделения РБ от РН считывают из полетного задания данные по параметрам управления и формируемой на доразгоне орбите РБ, стабилизируют продольную ось РБ относительно ее направления на момент отделения от РН, в заданные в полетном задании времена от момента отделения РБ от РН включают на оговоренный в полетном задании интервал времени двигатели коррекции импульса для поджатия топлива в баках, запускают маршевый двигатель, спустя фиксированный момент времени после запуска маршевого двигателя начинают отработку заданной в полетном задании программы ориентации РБ по тангажу, корректируют программу ориентации с помощью терминального управлении и выключают маршевый двигатель, дополнительно после отделения от РН выполняют разворот РБ по тангажу до достижения ориентации, определяемой величиной заданного в полетном задании начального угла программы изменения ориентации на доразгоне, и на этом угле стабилизируют продольную ось РБ до момента начала отработки заданной программы ориентации.
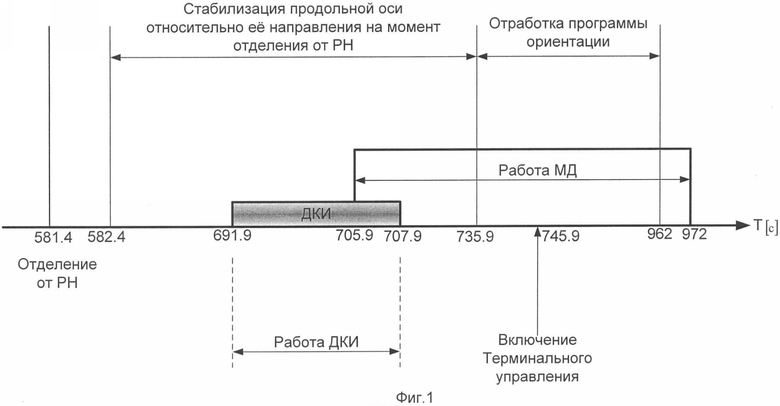
На фиг.1 представлена циклограмма управления РБ на участке доразгона по известному способу-прототипу, на фиг.2 - переходной процесс изменения программного угла ϑпр и углового рассогласования по тангажу Δϑ при управлении по способу-прототипу, на фиг.3 - циклограмма управления РБ на участке доразгона по предлагаемому способу, на фиг.4 - переходные процессы по предлагаемому способу.
В циклограмме на фиг.1 (способ-прототип для выведения одного из космических аппаратов с помощью РБ) отделение РБ от РН выполняется на 581.4 сек от момента старта РН. Через 1 сек после этого начинается процесс стабилизации продольной оси РБ относительно ее направления на момент отделения от РН. Работа двигателей коррекции импульса для поджатия топлива выполняется на интервале 691,9-707,9 сек, маршевый двигатель запускается на 705,9 сек. Отработка программы ориентации РБ по тангажу начинается на 736 секунде полета через 30 сек после запуска маршевого двигателя, а терминальное управление подключается через 40 секунд, то есть на 746 секунде. За 10 секунд до отключения маршевого двигателя программа ориентации РБ фиксируется и не изменяется.
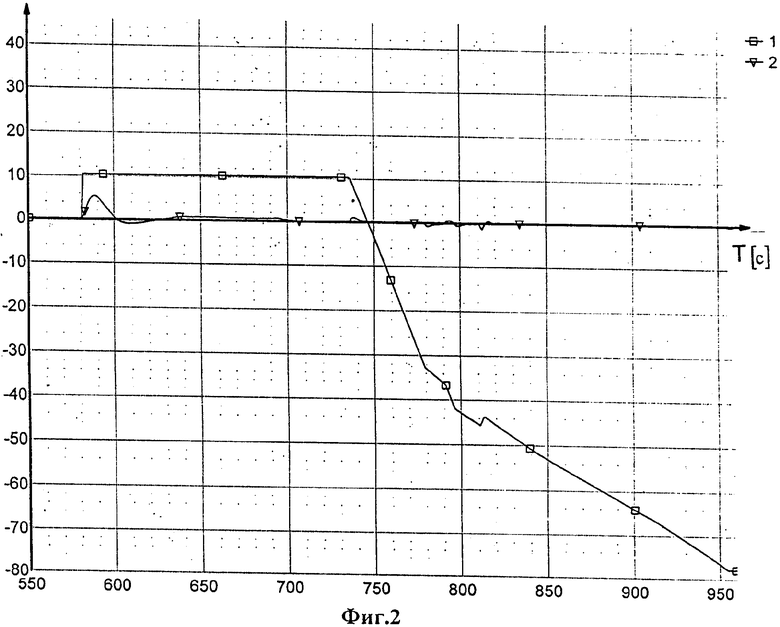
На фиг.2 при управлении по способу-прототипу на участке доразгона представлены графики переходных процессов, где 1 - изменение заданного угла тангажа ϑпр, определяемое вначале ориентацией продольной оси РБ в момент отделения от РН, а затем программой изменения направления тяги на маневре и 2 - угловое отклонения по тангажу Δϑ продольной оси РБ относительно угла ϑпр (оба параметра в градусах). На участке стабилизации относительно начальной ориентации заданный угол тангажа находится на уровне +10 градусов. В рассматриваемом случае по полетному заданию начальный угол тангажа в программе изменения ориентации РБ, а значит и тяги маршевого двигателя, равен минус 20,8 град. При переходе с режима стабилизации на отработку программы ориентации программный угол тангажа изменяется на 30,8 градуса. Исходя из обеспечения нормальных условий для работы системы стабилизации изменение заданного угла тангажа допускается со скоростью, не превышающей 1 град/сек, и поэтому выход на установившийся режим отслеживания программы ориентации завершается к 777 секунде, то есть занимает примерно 41 секунду, в течение которых тяга маршевого двигателя имеет нерасчетное направление, что приводит к затягиванию процесса формирования орбиты на доразгоне и выключению маршевого двигателя на 972 сек.
Предложенный способ управления продольным движением РБ на участке доразгона реализован следующим образом.
После отделения РБ от РН считывают из полетного задания данные по параметрам управления и формируемой на доразгоне орбите РБ, выполняют разворот РБ по тангажу до достижения ориентации, определяемой величиной заданного в полетном задании начального угла программы изменения ориентации на доразгоне, и затем на этом угле стабилизируют продольную ось РБ до момента начала отработки заданной программы ориентации.
В заданные в полетном задании времена от момента отделения РБ от РН включают на оговоренный в полетном задании интервал времени двигатели коррекции импульса для поджатия топлива в баках и запускают маршевый двигатель. Спустя фиксированный момент времени после запуска маршевого двигателя начинают отработку заданной в полетном задании программы ориентации РБ по тангажу, которую корректируют с помощью терминального управлении. Выключают маршевый двигатель а за 10 секунд до этого программу ориентации РБ перестают изменять.
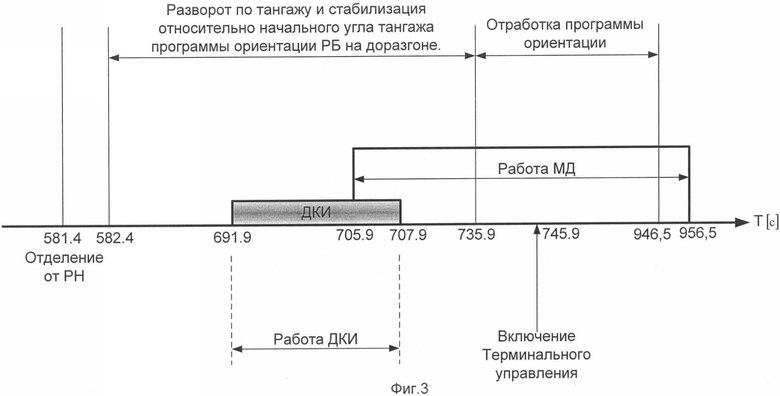
На фиг.3 представлена циклограмма работы системы управления на участке доразгона по предлагаемому способу. Она отличается от циклограммы способа-прототипа на фиг.1 тем, что после отделения от РН режим стабилизации продольной оси РБ относительно ее направления на момент отделения от РН заменен на разворот по тангажу и стабилизацию продольной оси относительно начального угла тангажа в программе изменения ориентации РБ в продольной плоскости.
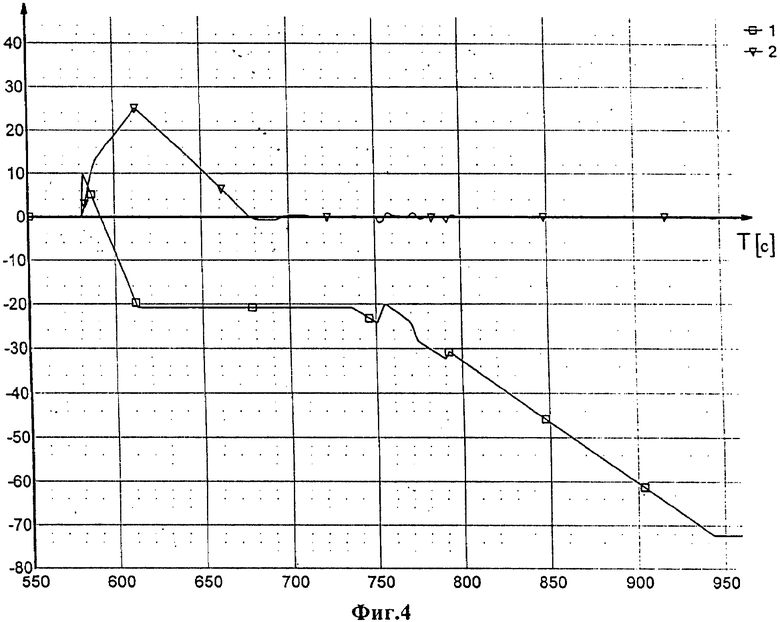
На фиг.4 представлены переходные процессы, аналогичные процессам на фиг.2, для управления на доразгоне по предлагаемому способу. Перекладка программного (заданного) угла тангажа со значения +10 град на минус 20,8 град выполняется примерно за 30 секунд, отработка этого угла завершается к 670 секунде. За счет предварительно выполненной ориентации РБ на расчетное направление тяги маршевого двигателя при его включении отработка заданной программной ориентации реализуется с минимальными поправками от терминального управления. В результате такого управления формирование требуемой орбиты на доразгоне и завершение работы маршевого двигателя выполнено на 956.5 секунде, то есть на 15.5 сек раньше, чем по способу-прототипу, что позволило снизить расход топлива на 95 кг.
Таким образом, предложенный способ управления продольным движением разгонного блока на участке доразгона позволяет снизить энергетические затраты РБ на доразгоне.
Источники информации
1. Отчет «Алгоритмическое обеспечение СУ РБ». МОКБ «Марс», 1998 г., стр.12-15.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2009 |
|
RU2408851C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| СПОСОБ КОНТРОЛЯ ЗАПУСКА МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА И ФОРМИРОВАНИЯ КОМАНДЫ "АВАРИЯ РАЗГОННОГО БЛОКА" НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2459748C1 |
| СПОСОБ КОРРЕКЦИИ ВРЕМЕНИ ВКЛЮЧЕНИЯ МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2011 |
|
RU2461496C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА | 2010 |
|
RU2432595C1 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОГРАММЫ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ ЕГО НАВЕДЕНИЕМ НА ЗАДАННУЮ ОРБИТУ | 2005 |
|
RU2282568C1 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ИЗМЕНЕНИЯ ПРОДОЛЬНОГО ДВИЖЕНИЯ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2003 |
|
RU2254271C2 |
| СПОСОБ КОРРЕКЦИИ ПАРАМЕТРОВ ПРОГРАММЫ ОРИЕНТАЦИИ ПРИ ТЕРМИНАЛЬНОМ УПРАВЛЕНИИ НАВЕДЕНИЕМ РАЗГОННОГО БЛОКА НА ЗАДАННУЮ ОРБИТУ | 2010 |
|
RU2454357C1 |
Изобретение относится к области, связанной с управлением движением разгонного блока при выведении его на опорную орбиту после отделения от ракеты-носителя. Способ управления продольным движением разгонного блока на участке доразгона, в котором после отделения разгонного блока от ракеты-носителя стабилизируют продольную ось разгонного блока относительно ее направления на момент отделения от ракеты-носителя. Считывают из полетного задания данные по параметрам управления и формируемой на доразгоне орбите разгонного блока, в заданные в полетном задании времена от момента отделения разгонного блока от ракеты-носителя включают на оговоренный в полетном задании интервал времени двигатели коррекции импульса для поджатия топлива в баках, запускают маршевый двигатель. Спустя фиксированный момент времени после запуска маршевого двигателя начинают отработку заданной в полетном задании программы ориентации разгонного блока по тангажу, корректируют программу ориентации с помощью терминального управления и выключают маршевый двигатель, за установленный интервал времени до этого фиксируют программу ориентации. После отделения от ракеты-носителя выполняют разворот разгонного блока по тангажу до достижения ориентации, определяемой величиной заданного в полетном задании начального угла программы изменения тангажа на доразгоне, и на этом угле стабилизируют продольную ось разгонного блока до момента начала отработки заданной программы ориентации. Достигается снижение энергетических затрат разгонного блока на этапе доразгона. 4 ил.
Способ управления продольным движением разгонного блока на участке доразгона, заключающийся в том, что после отделения разгонного блока от ракеты-носителя стабилизируют продольную ось разгонного блока относительно ее направления на момент отделения от ракеты-носителя, считывают из полетного задания данные по параметрам управления и формируемой на доразгоне орбите разгонного блока, в заданные в полетном задании времена от момента отделения разгонного блока от ракеты-носителя включают на оговоренный в полетном задании интервал времени двигатели коррекции импульса для поджатия топлива в баках, запускают маршевый двигатель, спустя фиксированный момент времени после запуска маршевого двигателя начинают отработку заданной в полетном задании программы ориентации разгонного блока по тангажу, корректируют программу ориентации с помощью терминального управлении и выключают маршевый двигатель, а за установленный интервал времени до этого фиксируют программу ориентации, отличающийся тем, что после отделения от ракеты-носителя выполняют разворот разгонного блока по тангажу до достижения ориентации, определяемой величиной заданного в полетном задании начального угла программы изменения тангажа на доразгоне, и на этом угле стабилизируют продольную ось разгонного блока до момента начала отработки заданной программы ориентации.
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2305859C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280589C2 |
| Женская прокладка с барьерными манжетами | 2016 |
|
RU2705944C2 |
| 9-(2-Нитрофенилтио)-6-окси-3,4-диметоксикарбонилтетрацикло (6,1,1,02,7,05,10) дец-3-ен,обладающий иммуностимулирующей активностью | 1979 |
|
SU772108A1 |

