Изобретение относится к ракетно-космической технике, а именно к способам управления движением разгонных блоков (РБ) на жидком топливе, обеспечивающих переход с опорной орбиты, полученной с помощью ракеты-носителя, на целевую орбиту космического аппарата (КА).
В космической технике известен аналог этого способа управления программным разворотом РБ с помощью неподвижных двигателей ориентации, при котором осуществляется набор угловой скорости, движение по инерции, уменьшение угловой скорости до нуля, стабилизация в заданной ориентации как для случая включенных продольных двигателей, так и при отсутствии продольного ускорения (см. [1]). Однако указанный аналог не обеспечивает качества переходных процессов при включении продольных двигателей РБ. Необходимость продольного движения РБ при одновременном развороте вызвана возможной одновременностью требования поджатия топлива перед включением маршевого двигателя и необходимостью переориентации РБ для получения требуемого вектора приращения кажущейся скорости. В таких случаях подвижная масса жидкости совершает сначала вынужденные, а затем свободные колебания в баке РБ, оказывая на стенки баков силовые воздействия. В результате переходные процессы разворота РБ приобретают колебательный характер, что ухудшает точность ориентации РБ во время разворота и требует дополнительных затрат топлива для демпфирования этих колебаний.
Также известен прототип изобретения, в котором при включенных продольных двигателях осуществляется набор угловой скорости, движение по инерции со стабилизацией углового движения в установившемся режиме, уменьшение угловой скорости РБ до нуля с одновременным демпфированием колебаний топлива с использованием измерения отклонения топлива в баке РБ, стабилизация в заданной ориентации (см. [2]). Однако указанный прототип использует информацию от датчиков колебаний жидкости в баке РБ. Использование датчиков существенно усложняет конструкцию системы управления, увеличивает массу и уменьшает ее надежность, так как среди компонентов жидкого топлива часто используются криогенные или агрессивные жидкости.
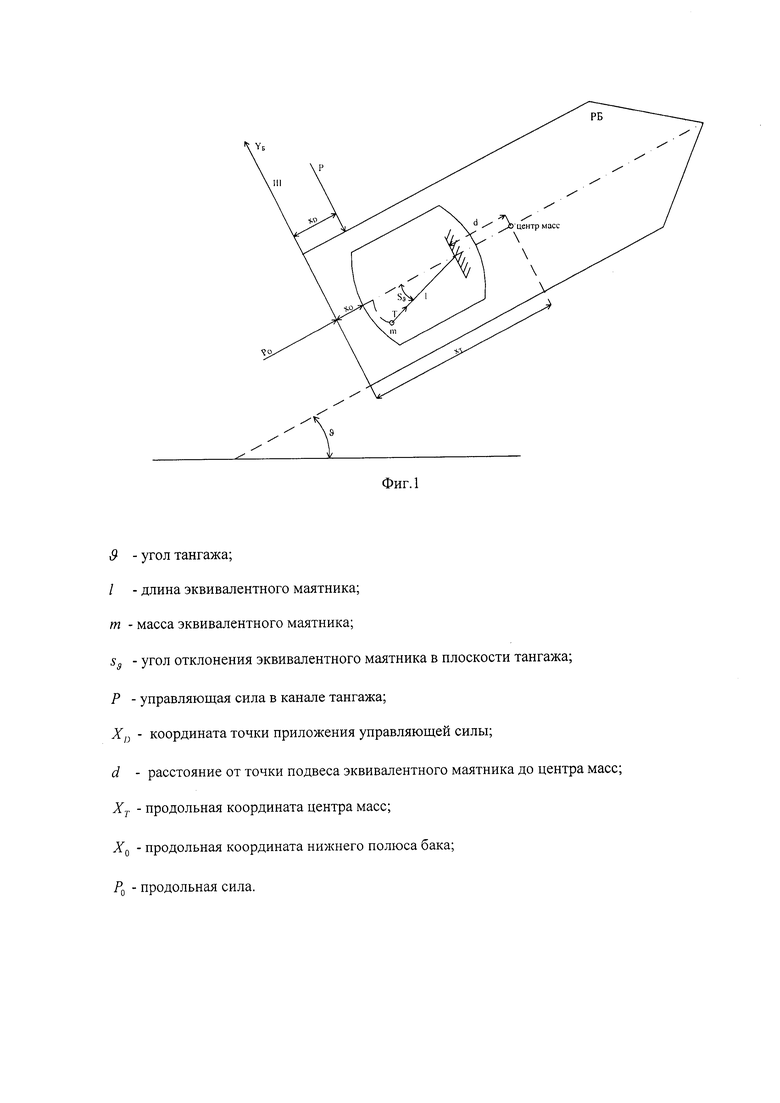
Предлагаемое изобретение свободно от недостатков аналогов за счет учета априорной информации о параметрах колебания жидкости в баке РБ и отказе от датчиков колебания жидкости в баке путем демпфирования колебаний жидкости как при двухступенчатом наборе угловой скорости разворота, так и при двухступенчатом торможении РБ. На фиг. 1 изображена схема РБ на участке поджатия топлива и программного разворота с механическим эквивалентом колеблющейся жидкости в баке РБ. Обоснование использования маятниковой модели и принятые обозначения описаны в [3] и [4].
Задачей предлагаемого изобретения является оптимизация циклограммы функционирования РБ за счет расширения возможностей системы управления в части совмещения динамических операций с одновременным уменьшением возмущений при одновременном их выполнении.
Указанная задача выполняется за счет того, что в способе управления программным разворотом разгонного блока с помощью неподвижных двигателей ориентации постоянной тяги на участке поджатия топлива, заключающемся в выполнении разворота разгонным блоком: набора угловой скорости, движении по инерции и торможении, согласно изобретению, разворот осуществляют путем учета априорной информации о параметрах колебания жидкости в баке разгонного блока без измерения положения жидкости с помощью приборов, при этом управляющее воздействие реализуемое с помощью двигателей ориентации путем задания ступенчатой программной угловой скорости, как начала, так и окончания разворота, разбивается на два воздействия, разнесенных во времени на половину периода колебаний жидкости в баке так, что колебания жидкости будут погашены.
Использование априорной информации (известной до полета РБ) о параметрах колебаний жидкости в баке РБ, которая имеет достаточную точность относительно реализуемых параметров колебаний в полете РБ, позволяет организовать такое двухступенчатое программное движение разворота РБ, при котором вынужденные колебания жидкости второй ступени программного движения были противофазными свободным колебаниям, вызванным первой ступенью программного движения и полностью их демпфировали. Для организации такого демпфирования предлагается изменить не алгоритмы автомата стабилизации, как это сделано во втором прототипе, а алгоритм формирования программной скорости разворота РБ, оставив без изменений сам автомат стабилизации.
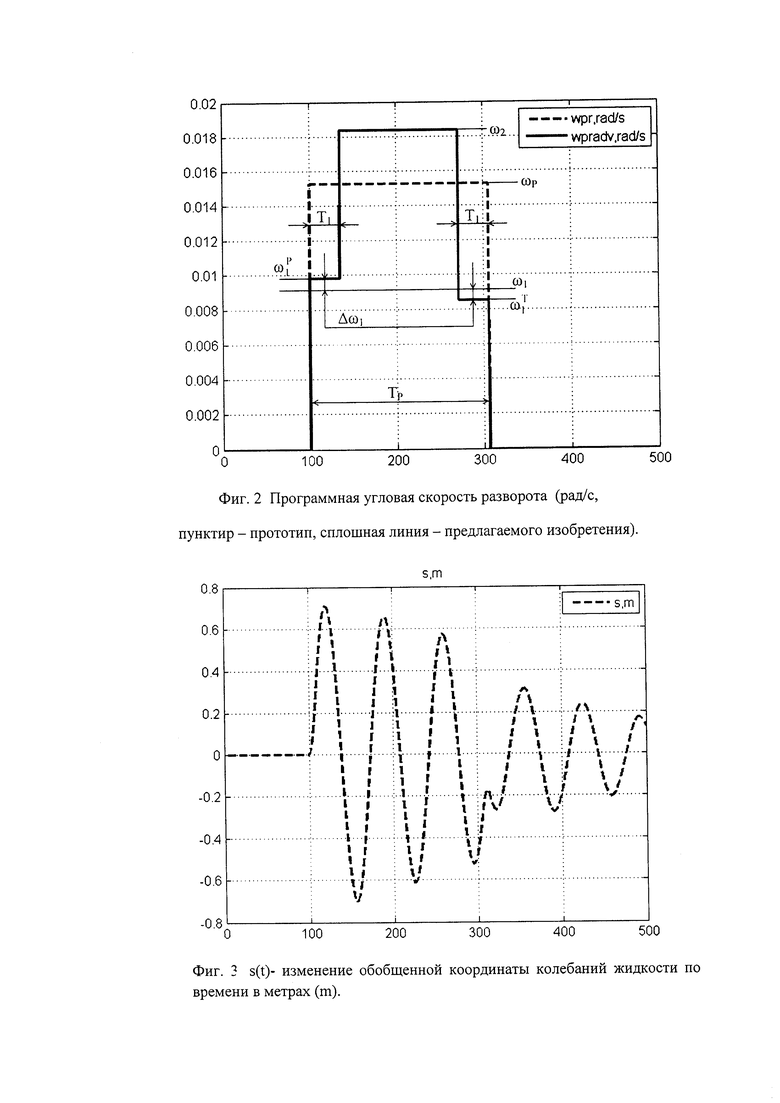
На фиг. 2 приведен пример программной угловой скорости плоского разворота РБ на 180 градусов за 206 с, отведенных циклограммой полета РБ. Во время разворота бортовые алгоритмы прототипов формируют постоянную функцию программной угловой скорости (пунктир) и интеграл от нее - текущее программное положение РБ, которые используются в автомате стабилизации. Сплошная линия иллюстрирует предлагаемую функцию программной угловой скорости разворота. Площади под функциями совпадают, что обеспечивает одинаковый угол разворота.
Расчет на борту РБ предлагаемой функции угловой скорости не является ресурсоемкой процедурой и может быть безусловно реализован в современной БЦВМ непосредственно перед осуществлением маневра. Порядок проведения расчетов следующий:
1. Оценка количества топлива в баке по результатам выполнения предыдущих этапов циклограммы. Для этого используется величина заправленного топлива и секундного расхода (содержащиеся в полетном задании (ПЗ) и суммарное огневое время двигательной установки на текущий момент времени. Оценка количества топлива в баке может корректироваться с использованием информации системы управления расходом топлива (если она реализована в РБ);
2. Использование хранящихся на борту параметров механического аналога жидкости в баке РБ как функции от количества топлива в баке. Для простого варианта расчета достаточно величины длины эквивалентного маятника l;
3. Получение информации от системы наведения по текущей массе орбитального блока m и величине тяги двигателей, задействованных для поджатия топлива Ро;
4. Расчет величин продольного кажущегося ускорения, квадрата частоты колебаний эквивалентного маятника, периода колебаний маятника для простого варианта по формулам:
Приведенные формулы соответствуют случаю малой относительной массы колеблющегося топлива и возможности не учета разницы между парциальной частотой колебаний и собственной частотой системы конструкция-жидкость. В более сложном варианте необходим расчет собственных частот системы с использованием всех перечисленных на фиг. 1 параметров, характеризующих твердое тело и эквивалентный маятник. Так как даже при линейных расчетах необходимо находить комплексные корни характеристического уравнения, получение периода колебаний жидкости необходимо проводить на этапе подготовки полетного задания. В случае больших отклонений жидкости от невозмущенного положения необходимо провести нелинейное моделирование для набора расчетных случаев, и результаты в табличной форме занести в полетное задание.
5. Использование величины половины периода колебаний эквивалентного маятника для оценки длительности первой ступени набора и гашения скорости T1:

6. Расчет программных угловых скоростей разворота на основном участке разворота и ступенчатых при разгоне и торможении по формулам:


Поправка Δω1 необходима для учета нелинейности динамики жидкости при значительных отклонениях колеблющейся массы от невозмущенного положения.
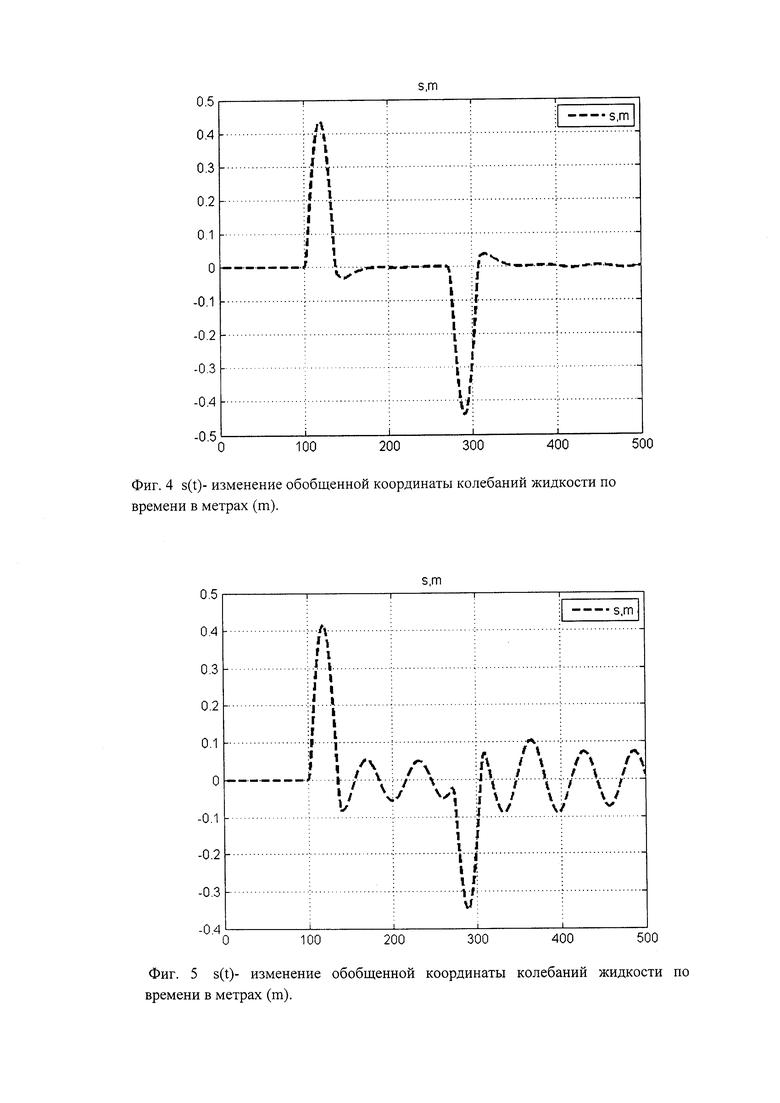
Результаты математического моделирования программного разворота с использованием предлагаемого способа управления для гипотетического разгонного блока приведены на фиг. 4-5. Параметры гипотетического РБ приняты близкими к существующим и проектируемым жидкостным РБ при учете колеблющегося окислителя в баке, расположенном ниже центра масс. Учет подвижности горючего не проводился по причине его малого влияния на динамику РБ из-за установки бака вблизи центра масс орбитального блока и использования компонента низкой плотности (например, жидкий водород). Автомат стабилизации использовался традиционный для пассивного полета РБ (ПД с триггером Шмидта и зоной нечувствительности 0.5 град) и не изменялся при моделировании. На фиг. 3 изображено отклонение эквивалентного маятника при традиционном управлении с постоянной программной скоростью, при этом затраты топлива соответствуют 38 с включения управляющего двигателя тягой 12.5 кгс (ДМТ). На фиг. 4 изображено отклонение эквивалентного маятника при предлагаемом управлении с изменяемой программной скоростью, при этом затраты топлива соответствуют 22 с включения управляющего ДМТ. На фиг. 5 изображено отклонение эквивалентного маятника при предлагаемом управлении и 5% отклонений параметров РБ от номинальных с затратами топлива 23 с включения управляющего ДМТ.
Таким образом, заявлен способ управления программным разворотом разгонного блока с помощью неподвижных двигателей ориентации постоянной тяги на участке поджатая топлива, заключающийся в выполнении разворота разгонным блоком: набора угловой скорости, движении по инерции и торможении. Отличительная особенность способа заключается в том, что разворот осуществляют путем учета априорной информации о параметрах колебания жидкости в баке разгонного блока без измерения положения жидкости с помощью приборов, при этом управляющее воздействие реализуемое с помощью двигателей ориентации путем задания ступенчатой программной угловой скорости как начала, так и окончания разворота, разбивается на два воздействия, разнесенных во времени на половину периода колебаний жидкости в баке так, чтобы колебания жидкости были погашены.
Техническим результатом изобретения является оптимизация циклограммы функционирования РБ за счет расширения возможностей системы управления в части совмещения динамических операций с одновременным уменьшением возмущений при одновременном их выполнении.
Источники информации
1. Б.В. Раушенбах, Е.Н. Токарь. Управление ориентацией космических аппаратов. М.: «Наука», 1974 г., стр. 191-194.
2. Патент RU 2541576. Способ управления программным разворотом разгонного блока.
3. А.Ш. Альтшулер, В.А. Лобанов. Математические модели пространственных колебаний жидких компонентов топлива в баках ракеты космического назначения на активных участках полета. Авиакосмическая техника и технология. 2010 г., №2, стр. 39-46.
4. К.С. Колесников. Динамика ракет. М.: «Машиностроение», 2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА | 2013 |
|
RU2541576C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2007 |
|
RU2350521C1 |
| СПОСОБ СТАБИЛИЗАЦИИ СТРУКТУРНО НЕУСТОЙЧИВОГО ОСЦИЛЛЯТОРА ЖИДКОСТИ РАЗГОННЫХ БЛОКОВ И ВЕРХНИХ СТУПЕНЕЙ РАКЕТ-НОСИТЕЛЕЙ | 2019 |
|
RU2722399C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА В КОНЦЕ МАНЕВРА | 2010 |
|
RU2432596C1 |
| СПОСОБ КОНТРОЛЯ ЗАПУСКА МАРШЕВОГО ДВИГАТЕЛЯ РАЗГОННОГО БЛОКА И ФОРМИРОВАНИЯ КОМАНДЫ "АВАРИЯ РАЗГОННОГО БЛОКА" НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2459748C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2009 |
|
RU2408851C1 |
| Способ предпусковой инерционной сепарации в невесомости газовых включений в жидком компоненте топлива орбитального блока (варианты) | 2021 |
|
RU2775946C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОТЕРИ ТЯГИ ДВИГАТЕЛЯМИ ОРИЕНТАЦИИ РАЗГОННОГО БЛОКА | 2019 |
|
RU2739645C1 |
| МАЛЫЙ РАЗГОННЫЙ БЛОК | 2024 |
|
RU2830531C1 |
Изобретение относится к управлению ориентацией жидкостного разгонного блока (РБ) во время работы продольно установленных двигателей поджатия топлива (или маршевой двигательной установки). Априорная информация (известная до полета РБ) о параметрах колебаний жидкости в баке РБ имеет достаточную точность (как показывает моделирование) для организации двухступенчатого программного разворота РБ без измерения положения жидкости в баке. Разворот производят так, чтобы вынужденные колебания жидкости на второй его ступени были противофазными свободным колебаниям, вызванным первой ступенью, и тем самым их гасили. Для организации такого процесса следует изменить алгоритм формирования программной скорости разворота РБ, не изменяя алгоритмов работы автомата стабилизации. Техническим результатом является оптимизация циклограммы функционирования РБ путём расширения возможностей системы управления в части совмещения динамических операций, с одновременным уменьшением возмущений от них. 5 ил.
Способ управления программным разворотом разгонного блока с помощью неподвижных двигателей ориентации постоянной тяги на участке поджатия топлива, заключающийся в выполнении разворота разгонным блоком: набора угловой скорости, движения по инерции и торможения, отличающийся тем, что разворот осуществляют путем учета априорной информации о параметрах колебания жидкости в баке разгонного блока без измерения положения жидкости с помощью приборов, при этом управляющее воздействие, реализуемое с помощью двигателей ориентации путем задания ступенчатой программной угловой скорости как начала, так и окончания разворота, разбивается на два воздействия, разнесенных во времени на половину периода колебаний жидкости в баке так, чтобы колебания жидкости были погашены.
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА | 2013 |
|
RU2541576C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ РАЗГОННОГО БЛОКА НА УЧАСТКЕ ДОРАЗГОНА | 2010 |
|
RU2424954C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1996 |
|
RU2115597C1 |
| US 5517418 A, 14.05.1996. | |||

