Изобретение относится к ракетно-космической технике, а именно к способам управления движением жидкостных ракет-носителей (РН), обеспечивающих устойчивое угловое движение всего объекта во время работы маршевой двигательной установки.
Известен способ [1] стабилизации жидкостного осциллятора, состоящий в установке необходимого количества демпфирующих перегородок в бак, приводящий к невозможности возникновения неустойчивого жидкостного осциллятора. Однако при этом ухудшаются энерго-массовые характеристики РН и увеличивается стоимость изготовления. В результате конструктивный способ решения задачи стабилизации не рационален.
В космической технике применяется традиционный амплитудный способ [1] стабилизации неустойчивых жидкостных осцилляторов и известны два предложенных в литературе фазовых метода стабилизации выбранных в качестве аналогов:
- Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с использованием традиционного автомата стабилизации создающего фазовое опережение на частотах жидкостных осцилляторов, не обеспечивающего устойчивости «в малом», но, за счет нелинейного демпфирования в баке, обеспечивающего техническую устойчивость «в большом» (колебательный режим движения с допустимой амплитудой) [1];
- Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с добавлением к традиционному автомату стабилизации обратной связи по текущей координате неустойчивого осциллятора для переноса соответствующего корня характеристического уравнения в область устойчивости [2].
В качестве прототипа выбран способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с помощью маршевого или управляющих двигателей, заключающийся в измерении параметров движения ракеты-носителя, применении традиционного алгоритма стабилизации, добавление алгоритма основанного на использовании априорных данных о динамических свойствах ракеты-носителя путем использования так называемых резонансных фильтров, выделяющих частотный диапазон вокруг собственной частоты, соответствующей неустойчивому осциллятору с последующим созданием в этом диапазоне необходимого сигнала для его фазовой стабилизации [3].
Сведения о практической реализации фазовых методов стабилизации структурно неустойчивых осцилляторов аналога и прототипа отсутствуют.
Первый аналог не обеспечивает асимптотической устойчивости и приводит к уменьшению запасов управляемости из-за загрузки органов управления колебательными перемещениями на частоте неустойчивого осциллятора. Также, обуславливает наличие вынужденных колебаний устойчивых осцилляторов, в том числе из расходуемых баков, что особенно опасно перед выключением маршевой двигательной установки. Допустимый уровень колебаний, наиболее часто, может быть получен только при совместном использовании с демпфирующими устройствами внутри бака с вытекающими уже описанными недостатками.
Второй аналог свободен от недостатков первого аналога, однако, имеет свои. Главный недостаток состоит в отсутствии прямого измерения колебаний жидкости в баке. Датчики, если их установить в баке, усложнят конструкцию РН. увеличат ее стоимость и уменьшат надежность. Предлагаемый алгоритм оценивания параметров колебаний в баке не обеспечивает точного оценивания из-за существенного упрощения уравнения динамики жидкостного осциллятора.
Выбранный прототип свободен от недостатков первого и второго аналогов, однако имеет присущие ему недостатки, а именно:
- обеспечение алгоритмом прототипа синфазности выходного сигнала резонансного фильтра с колебаниями неустойчивого осциллятора не гарантировано, что может привести к неустойчивости;
- узкополосный частотный диапазон резонансного фильтра требует достоверных априорных знаний параметров неустойчивого осциллятора. Немалое (выходящее за пределы допустимого диапазона) отклонение тяги двигателя или неточность оценки частоты осциллятора приведет к неработоспособности всего алгоритма стабилизации;
- не проверена работоспособность предлагаемого способа в условиях имеющихся помех в оценках вторых производных параметров движения, поступающих на узкополосные резонансные звенья из-за помех дискретизации и других.
Задачей предлагаемого изобретения является обеспечение асимптотической устойчивости жидкостных осцилляторов.
Указанная задача выполняется за счет того, что в способе стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с помощью маршевого или управляющих двигателей, заключающемся в измерении параметров движения ракеты-носителя, применении алгоритма стабилизации, основанного на использовании априорных данных о динамических свойствах ракеты-носителя, согласно изобретению, в алгоритме стабилизации используется добавочный сигнал характеризующий состояние неустойчивого осциллятора полученный на основании его уравнения динамики.
Таким образом, в управлении используется динамическое звено соответствующее уравнению неустойчивого осциллятора динамической схемы объекта и обеспечивающее получение необходимой оценки его параметров движения (формирования добавочного сигнала) без использования дополнительных датчиков колебаний жидкости внутри бака.
Уравнение осциллятора окислителя без учета упругости объекта в канале рыскания имеет вид (1)

, где s - обобщенная координата осциллятора,
ψ - угловое отклонение в канале рыскания от программного положения (параметр движения РН),
 - угловое ускорение в канале рыскания (параметр движения РН),
- угловое ускорение в канале рыскания (параметр движения РН),
ωs, εs - частота и коэффициент затухания осциллятора,
 - коэффициенты динамической схемы РН описывающие влияние движения корпуса РН на динамику жидкости в баке имеющем структурную неустойчивость.
- коэффициенты динамической схемы РН описывающие влияние движения корпуса РН на динамику жидкости в баке имеющем структурную неустойчивость.
Откуда следует уравнение оценки отклонения неустойчивого осциллятора (2)

Так как координата z соответствует центру масс невозмущенной системы в программно-связанной системе координат, то необходим переход к величинам оцениваемым системой управления.

где: d1 - продольная координата гироприбора от центра масс;
 - ускорение точки установки гироприбора по боковой оси связанной системы координат;
- ускорение точки установки гироприбора по боковой оси связанной системы координат;
В результате добавочный сигнал после упрощений имеет вид (4):

Динамическое звено, описываемое выражением  (ks - коэффициент усиления), является резонансным фильтром, настроенным на частоту ωs и с общим коэффициентом усиления
(ks - коэффициент усиления), является резонансным фильтром, настроенным на частоту ωs и с общим коэффициентом усиления  на этой частоте. Такой фильтр имеет очень большой коэффициент усиления и узкую полосу пропускания определяемые малыми εs из динамической схемы объекта. Вследствие обычно назначенного в динамической схеме разбросана
на этой частоте. Такой фильтр имеет очень большой коэффициент усиления и узкую полосу пропускания определяемые малыми εs из динамической схемы объекта. Вследствие обычно назначенного в динамической схеме разбросана  вместо εs следует выбрать величину ε из диапазона 0.02…0.05, в результате чего возмущенные ωs (с учетом разбросов на величину
вместо εs следует выбрать величину ε из диапазона 0.02…0.05, в результате чего возмущенные ωs (с учетом разбросов на величину  ) попадают в полосу усиления резонансного звена с достаточным коэффициентом усиления. В результате алгоритм оценивания приобретает свойство малой чувствительности к отклонениям параметров объекта от номинальных.
) попадают в полосу усиления резонансного звена с достаточным коэффициентом усиления. В результате алгоритм оценивания приобретает свойство малой чувствительности к отклонениям параметров объекта от номинальных.
С учетом сказанного и после преобразований добавочный сигнал может быть представлен в виде (5).

где: 
Kψ, Wкор - передаточные функции автомата стабилизации, определяются традиционным алгоритмом стабилизации.
Для учета возможных немалых отклонений продольного ускорения от программного, величина ωs корректируется на борту по оценке  из системы наведения по формуле (6).
из системы наведения по формуле (6).
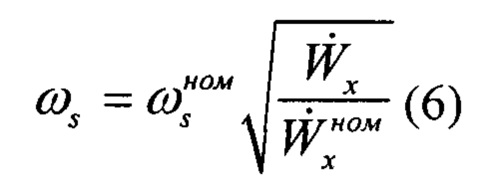
где:  номинальное значение парциальной частоты неустойчивого осциллятора,
номинальное значение парциальной частоты неустойчивого осциллятора,
 - реализованное кажущееся продольное ускорение,
- реализованное кажущееся продольное ускорение,
 - номинальное кажущееся продольное ускорение.
- номинальное кажущееся продольное ускорение.
Для увеличения помехоустойчивости алгоритма в качестве входных сигналов лучше использовать первые производные от параметров движения, так как вторые производные, используемые в (5), из-за дискретности измерений или импульсного их характера содержат значительные шумы. Воспользуемся алгебраическим тождеством (7) с использованием переменной s как комплексной переменной преобразования Лапласа:

Тогда окончательно добавочный сигнал принимает вид (8) и суммируется с сигналами угловой и боковой стабилизации.

где:
 - интеграл ускорения точки установки ГП по боковой оси связанной системы координат;
- интеграл ускорения точки установки ГП по боковой оси связанной системы координат;
 - угловая скорость вокруг оси OY1 связанной системы координат.
- угловая скорость вокруг оси OY1 связанной системы координат.
В результате алгоритм стабилизции приобретает свойство помехоустойчивости по отношению к шумам содержащимся во входных сигналах.
Формула (8) записана для бокового канала. Формула для нормального канала стабилизации аналогичнаей с учетом полярностей.
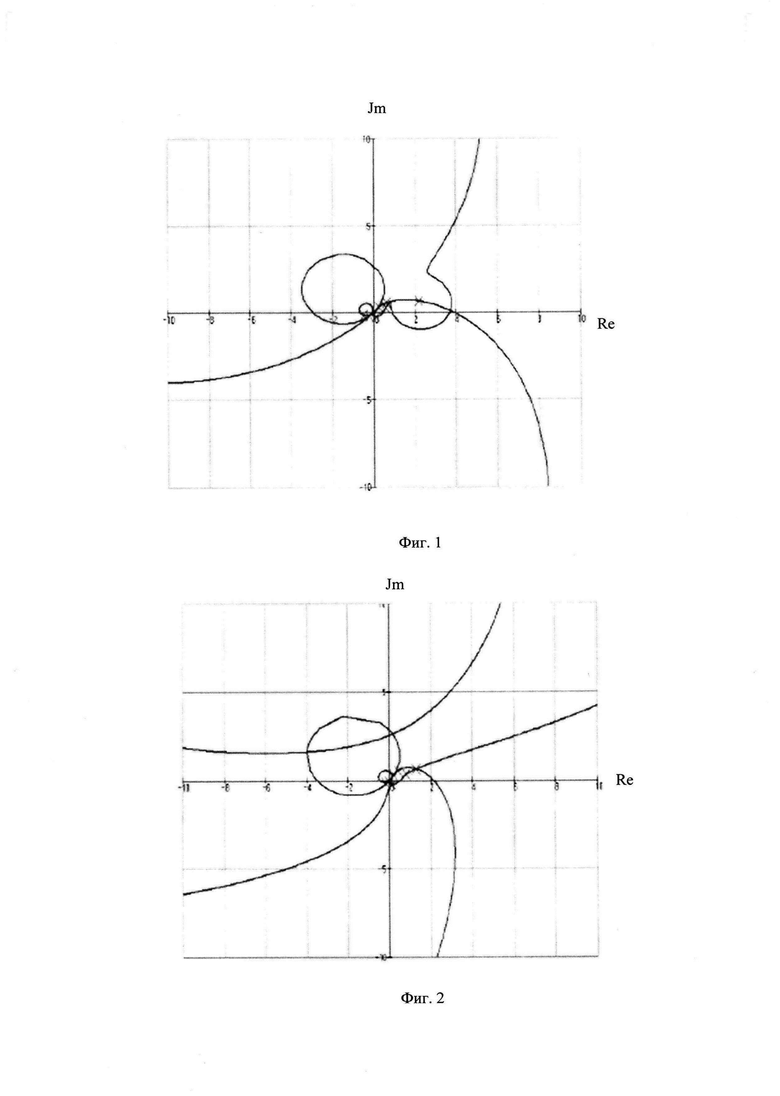
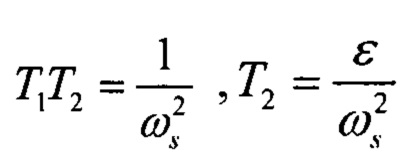
Результаты с использованием предлагаемого способа управления для гипотетической РН приведены на фиг. 1, 2. Параметры гипотетической ступени РН приняты близкими к существующим и проектируемым РН. Учитывались четыре колеблющегося осциллятора в баках и упругость конструкции РН.
На фиг. 1 показан годограф АФЧХ разомкнутой системы угловой стабилизации с традиционным алгоритмом стабилизации не обеспечивающим асимптотическую устойчивость для одного из характерных моментов полета ступени.
На фиг. 2 показан годограф АФЧХ разомкнутой системы угловой стабилизации с использованием описанного алгоритма, обеспечивающим асимптотическую устойчивость для того же момента времени.
Для проверки надежности получения технического результата были проведены расчеты для возмущенных параметров в пределах 5% разбросов. Асимптотическая устойчивость во всех случаях сохраняется.
Таким образом, заявлен способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с помощью маршевого или управляющих двигателей, заключающийся в измерении параметров движения ракеты-носителя, применении алгоритма стабилизации, основанного на использовании априорных данных о динамических свойствах ракеты-носителя. Отличительная особенность способа заключается в том, что в алгоритме стабилизации используется добавочный сигнал δs характеризующий состояние неустойчивого осциллятора полученный на основании его уравнения динамики;

где:
s - обобщенная координата осциллятора,
 - интеграл ускорения точки установки гироприбора по боковой оси связанной системы координат,
- интеграл ускорения точки установки гироприбора по боковой оси связанной системы координат,  - угловая скорость вокруг оси OY1 связанной системы координат,
- угловая скорость вокруг оси OY1 связанной системы координат,
d1 - продольная координата гироприбора от центра масс,
ωs, εs - частота и коэффициент затухания осциллятора,
 - коэффициенты динамической схемы ракеты-носителя описывающие влияние движения корпуса ракеты носителя на динамику жидкости в баке имеющем структурную неустойчивость, ks - коэффициент усиления, Kψ, Wкор - передаточные функции автомата стабилизации определяемые традиционным алгоритмом стабилизации.
- коэффициенты динамической схемы ракеты-носителя описывающие влияние движения корпуса ракеты носителя на динамику жидкости в баке имеющем структурную неустойчивость, ks - коэффициент усиления, Kψ, Wкор - передаточные функции автомата стабилизации определяемые традиционным алгоритмом стабилизации.
Техническим результатом изобретения является обеспечение асимптотической устойчивости жидкостных осцилляторов.
Источники информации:
1. К.С. Колесников. Динамика ракет. М.: «Машиностроение», 2003 г.
2. А.В. Бабин, А.И. Мытарев. Стабилизация структурно неустойчивых объектов РКТ с топливными баками на основе алгоритма с эталонной моделью. Космонавтика и ракетостроение, журнал №6 2015 г. стр. 136.
3. Патент на изобретение №2670328.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ СТРУКТУРНО НЕУСТОЙЧИВОГО ОСЦИЛЛЯТОРА ЖИДКОСТИ РАЗГОННЫХ БЛОКОВ И ВЕРХНИХ СТУПЕНЕЙ РАКЕТ-НОСИТЕЛЕЙ | 2019 |
|
RU2722399C1 |
| Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором | 2018 |
|
RU2670328C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОГРАММНЫМ РАЗВОРОТОМ РАЗГОННОГО БЛОКА | 2018 |
|
RU2722628C2 |
| СПОСОБ ПРОВЕДЕНИЯ ЛЁТНО-КОНСТРУКТОРСКИХ ИСПЫТАНИЙ БОРТОВОЙ СИСТЕМЫ ИСПАРЕНИЯ ОСТАТКОВ ЖИДКОГО ТОПЛИВА В БАКЕ ОТРАБОТАВШЕЙ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ | 2018 |
|
RU2690304C1 |
| СПОСОБ СПУСКА ОТДЕЛЯЮЩЕЙСЯ ЧАСТИ СТУПЕНИ РАКЕТЫ-НОСИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2726214C1 |
| РАКЕТА КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2008 |
|
RU2368542C1 |
| Способ контроля динамических характеристик рулевых трактов управления | 2023 |
|
RU2833090C2 |
| СПОСОБ БОРТОВОГО КОНТРОЛЯ ДЛЯ АВАРИЙНОГО ПРЕКРАЩЕНИЯ ПОЛЕТА РАКЕТЫ | 2011 |
|
RU2476357C2 |
| Устройство обеспечения посадки возвращаемой многоразовой ступени ракеты-носителя | 2024 |
|
RU2841245C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ МОРСКОЙ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ НА ПОДВОДНОМ УЧАСТКЕ ТРАЕКТОРИИ | 2000 |
|
RU2193155C2 |
Заявленное изобретение относится к способу стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с помощью маршевого или управляющих двигателей. Для стабилизации осцилляторов измеряют параметры движения ракеты-носителя, применяют алгоритм стабилизации, основанный на использовании априорных данных о динамических свойствах ракеты-носителя, используют добавочный сигнал, характеризующий состояние неустойчивого осциллятора, полученный на основании его уравнения динамики. Обеспечивается асимптотическая устойчивость жидкостных осцилляторов. 2 ил.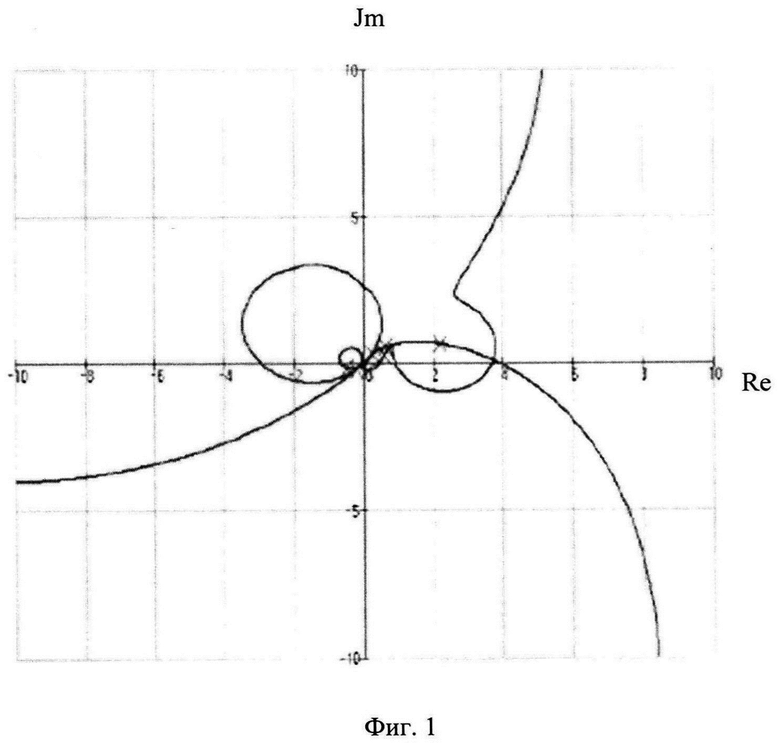
Способ стабилизации структурно неустойчивых осцилляторов жидкости ракет-носителей с помощью маршевого или управляющих двигателей, заключающийся в измерении параметров движения ракеты-носителя, применении алгоритма стабилизации, основанного на использовании априорных данных о динамических свойствах ракеты-носителя, отличающийся тем, что в алгоритме стабилизации используется добавочный сигнал δs, характеризующий состояние неустойчивого осциллятора, полученный на основании его уравнения динамики

где s - обобщенная координата осциллятора,
 - интеграл ускорения точки установки гироприбора по боковой оси связанной системы координат,
- интеграл ускорения точки установки гироприбора по боковой оси связанной системы координат,
 - угловая скорость вокруг оси OY1 связанной системы координат,
- угловая скорость вокруг оси OY1 связанной системы координат,
d1 - продольная координата гироприбора от центра масс,
ωs, εs - частота и коэффициент затухания осциллятора,
 - коэффициенты динамической схемы ракеты-носителя, описывающие влияние движения корпуса ракеты носителя на динамику жидкости в баке, имеющем структурную неустойчивость,
- коэффициенты динамической схемы ракеты-носителя, описывающие влияние движения корпуса ракеты носителя на динамику жидкости в баке, имеющем структурную неустойчивость,
ks - коэффициент усиления,
Kψ, Wкор - передаточные функции автомата стабилизации, определяемые традиционным алгоритмом стабилизации.
| Способ стабилизации движения летательного аппарата со структурно неустойчивым осциллятором | 2018 |
|
RU2670328C1 |
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ С МАРШЕВЫМ ЖРД | 2014 |
|
RU2562826C1 |
| РАКЕТА-НОСИТЕЛЬ, ВОЗВРАЩАЕМАЯ СТУПЕНЬ РАКЕТЫ-НОСИТЕЛЯ И СПОСОБ ЕЕ ЗАПУСКА ПРИ ВОЗВРАЩЕНИИ И СИСТЕМА ВЕРТОЛЕТНОГО ПОДХВАТА ВОЗВРАЩАЕМОЙ СТУПЕНИ | 2015 |
|
RU2609539C1 |
| US 0008500070 B2, 06.08.2013 | |||
| US 0003164955 A1, 12.01.1965. | |||

