Область техники
Изобретение относится к ракетно-космической технике, в частности к исполнительным приводам системы управления жидкостных ракет тяжелого класса.
Уровень техники
Из уровня техники известен метод проведения испытаний - см. книга «Экспериментальное определение характеристик автоматических систем», автор А.А. Вавилов, и-л., «Госэнергоиздат», 1967 г., стр. 37, где предложено определять амплитудно-фазовые частотные характеристики путем воздействия периодическими сигналами синусоидальной формы с разными частотами.
Также известен импульсный метод активной идентификации динамических характеристик рулевого тракта, см. книгу «Лабораторно-стендовая отработка динамических схем жидкостных ракет», издательство «ЛАТМЭС-МАТИ», 1999 г., стр. 134-141, автор А.В. Владимиров, где описано получение амплитудно-фазовых частотных характеристик методом импульсного воздействия.
Также известен «Способ получения амплитудно-фазовых частотных характеристик электрогидравлического привода», Патент №682680, Патентообладатель конструкторское бюро «Салют», зарегистрирован 29.06.1993 г., характеризующийся тем, что сигнал на входе формируют в виде импульса или последовательности импульсов минимально возможной длительности, при которой величина сигнала наибольшего отклонения штока привода составляет 95…150% от установившегося значения выходного сигнала.
Недостатками данных решений являются большие погрешности в оценке результатов во всем диапазоне частот при использовании импульсного метода и недопустимый для штатной конструкции летного образца уровень нагружений при использовании метода синусоидальных воздействий во всем диапазоне частот.
Авторами проведен анализ требований к динамическим характеристикам рулевых трактов систем управления полетом жидкостных ракет тяжелого класса, который позволяет разделить частотный диапазон исследований на две зоны.
В области собственных частот колебаний топлива в баках ~ до 3 Гц важно обеспечить фазовое опережение в алгоритмах управления, поэтому для этих частот задают требования к величинам фазового запаздывания. Эти величины надежно и с высокой точностью определяются при использовании метода синусоидальных воздействий (в нашем примере это 3 колебания с частотой 1 Гц). Нагружение конструкции при этом находится в допустимых пределах штатной работы привода и двигателя.
В области частот упругих колебаний корпуса ракеты важным требованием является ограничение амплитудных значений динамических характеристик. Проверку выполнения требований по этим ограничениям предложено осуществлять по реакции рулевого тракта на импульсное единичное воздействие, максимальная величина которого находится в ограниченных штатной документацией допустимых пределах. При этом также не возникает ненормированных воздействий на рулевой привод и на двигатель и осуществляется надежный и качественный контроль выполнения требования по амплитуде.
Таким образом, осуществлять контроль динамических характеристик рулевых трактов возможно на летных образцах ракет-носителей (РН) путем реализации последовательного воздействия сигналов синусоидальной формы и импульсной, причем общее время проведения эксперимента не более 10 с.
Рулевой тракт является важным исполнительным звеном в каналах управления полетом (РН). Он осуществляет преобразование электрического командного сигнала от системы управления РН в угловое отклонение маршевого двигателя.
Знание динамических характеристик рулевого тракта позволяет формировать алгоритмы и настройки системы управления для обеспечения управляемого и устойчивого полета ракеты.
В состав рулевого тракта входят:
- исполнительный привод поворота камеры двигателя, узлы крепления привода к корпусу РН и к двигателю и двигатель.
Для ракет тяжелого класса с жидкостными двигательными установками требования к динамическим характеристикам рулевых трактов управления формируются исходя, в основном, из необходимости решения задач по стабилизации полета ракеты в области частот колебаний топлива в баках (до 3 Гц) и в области частот упругих колебаний корпуса РН (7÷20 Гц).
Для успешного решения системой управления задачи обеспечения устойчивого и управляемого полета РН динамические характеристики рулевых трактов должны находиться в пределах заранее заданных ограничений по фазе и амплитуде.
Проверка соответствия заданным требованиям проводится на разных этапах изготовления ракеты-носителя и ее составных частей. При этих проверках (испытаниях рулевых трактов) обычно применяют методы периодических внешних воздействий синусоидальной формы во всем спектре частот - от 0,1÷0,5 Гц до 1,5÷20 Гц.
Такие воздействия существенно нагружают штатную конструкцию РН, причем при некоторых видах испытаний эти нагрузки недопустимы, например, при огневых испытаниях двигательных установок или при проверках на летных образцах РН, где получаются наиболее достоверные и качественные результаты.
Решение проблемы получения динамических характеристик рулевых трактов на штатных летных конструкциях, обеспечивающее высокое качество и надежность результатов, при этом, не превышая допустимый уровень нагружений на эти конструкции, предлагается осуществить путем воздействия на рулевой тракт сигналами двух разных форм.
Каждая из них идентифицирует выполнение требований к динамике рулевого тракта для своей частотной области: синусоидальный сигнал на низкой частоте (~1 Гц) - для подтверждения величин фазового запаздывания, необходимых для стабилизации РН на частотах колебаний топлива в баках, а импульсный сигнал - подтверждение требований в области частот упругих колебаний корпуса РН.
Покажем на конкретном примере реализацию способа.
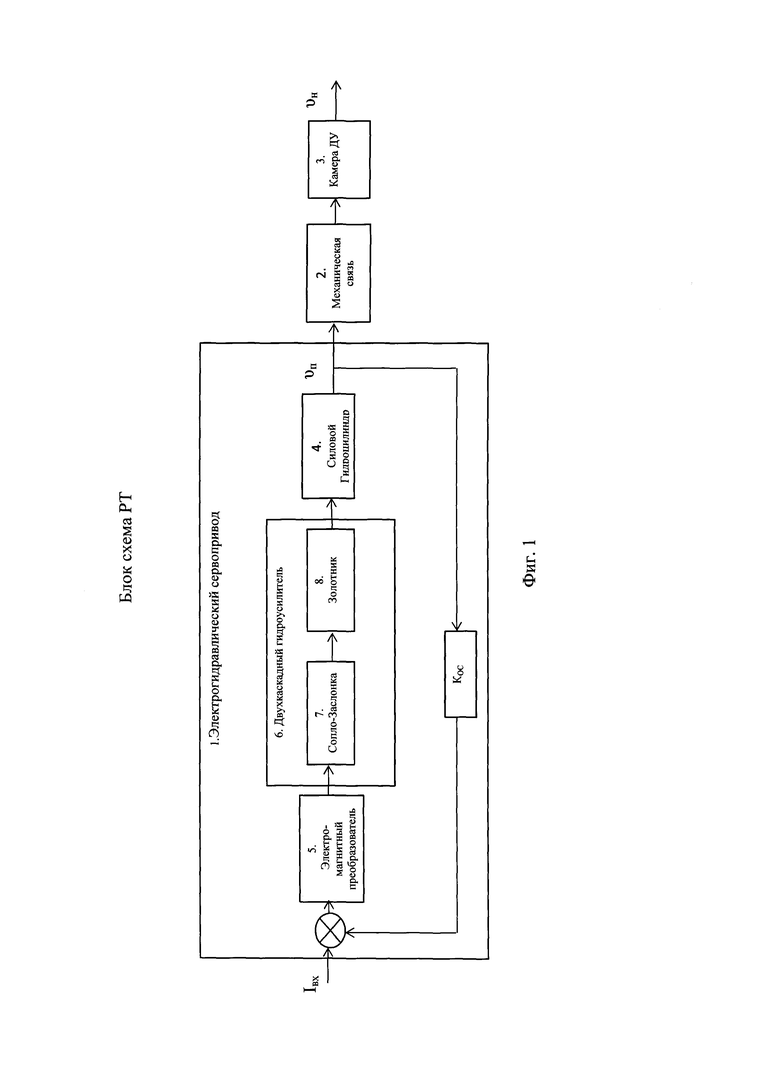
Рассмотрим типовую блок-схему рулевого тракта управления (см. Фиг.1).
Она состоит из электрогидравлического сервопривода 1, механической связи сервопривода 2 с камерой двигательной установки 3 и самой поворотной камерой двигательной установки.
Входной сигнал в виде тока управления (Iвх) подается на электрогидравлический сервопривод 1, который в свою очередь через электро-магнитный преобразователь 5 соединен с силовым гидроцилиндром 4 через двухкаскадный гидроусилитель 6, состоящий из сопла-заслонки 7 и золотника 8, а сигналами выхода являются сигнал перемещения штока силового цилиндра гидропривода 4 (νп) и сигнал поворота камеры ДУ 3 (νн).
Для этого примера предварительное определение допустимых величин по фазе и по амплитуде:
- требование по фазовому запаздыванию не более 25° на частоте 1 Гц;
- требование по амплитудной характеристике, являющейся коэффициентом передачи, не более 1,2 (или 120%) в частотном диапазоне до 15 Гц.
Затем, при проведении испытаний на вход рулевого тракта подают сигнал Iвх синусоидальной формы на частоте 1 Гц длительностью 3 с и регистрируют сигналы на выходе νп и νн.
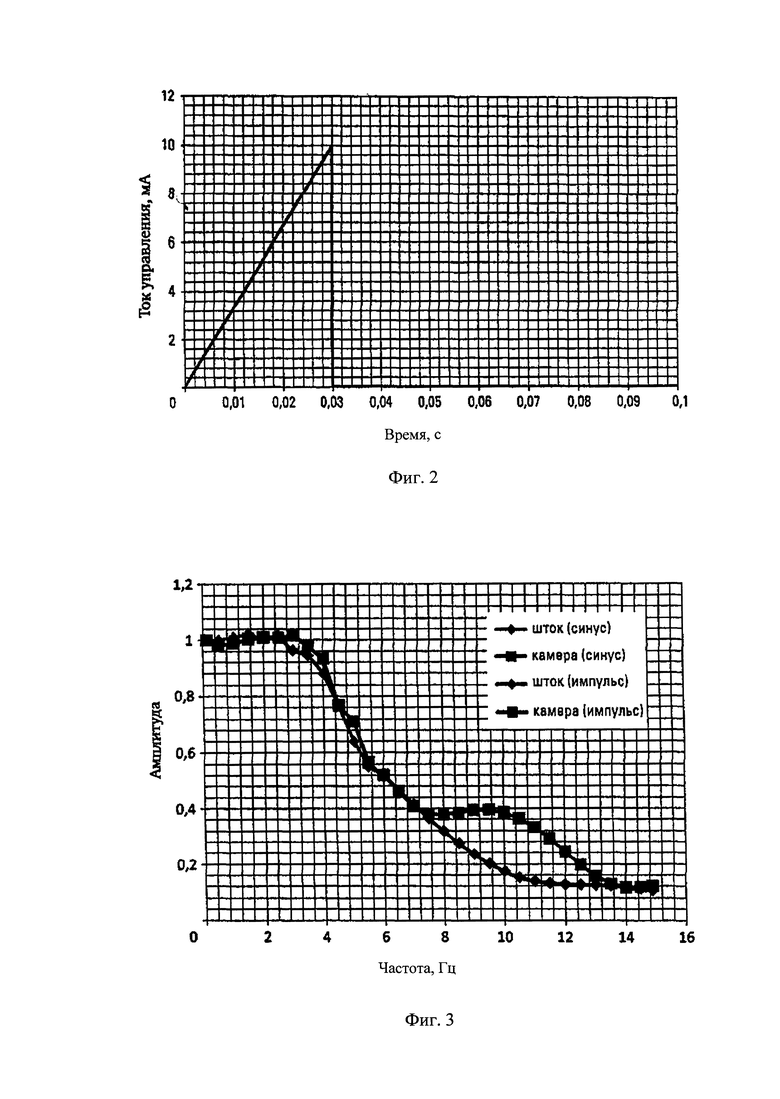
После завершения переходных процессов, через 2 с, подают на вход рулевого тракта импульсный сигнал тока управления Iвх (см. Фиг.2), длительность сигнала в данном примере 0,03 с, и также регистрируют сигналы νп и νн как реакцию рулевого тракта на импульсное управляющее воздействие. Затем с применением преобразования Фурье строится амплитудно-частотная и фазо-частотная характеристика как отношение сигнала на выходе к функции частоты к сигналу на входе, также представленному в виде функции частоты:
- по перемещению штока Ап (ω)=νп(ω)/Iвх(ω);
- по повороту камеры Ан (ω)=νн(ω)/Iвх(ω).
Фазовая частотная характеристика определяется:
- по перемещению штока ϕп=ϕνп(ω)-ϕiвх(ω);
- по повороту камеры ϕн=ϕνн(ω)-ϕiвх(ω),
где ϕп и ϕн величины фазовых запаздываний штока сервопривода и камеры двигателя относительно сигналов входа.
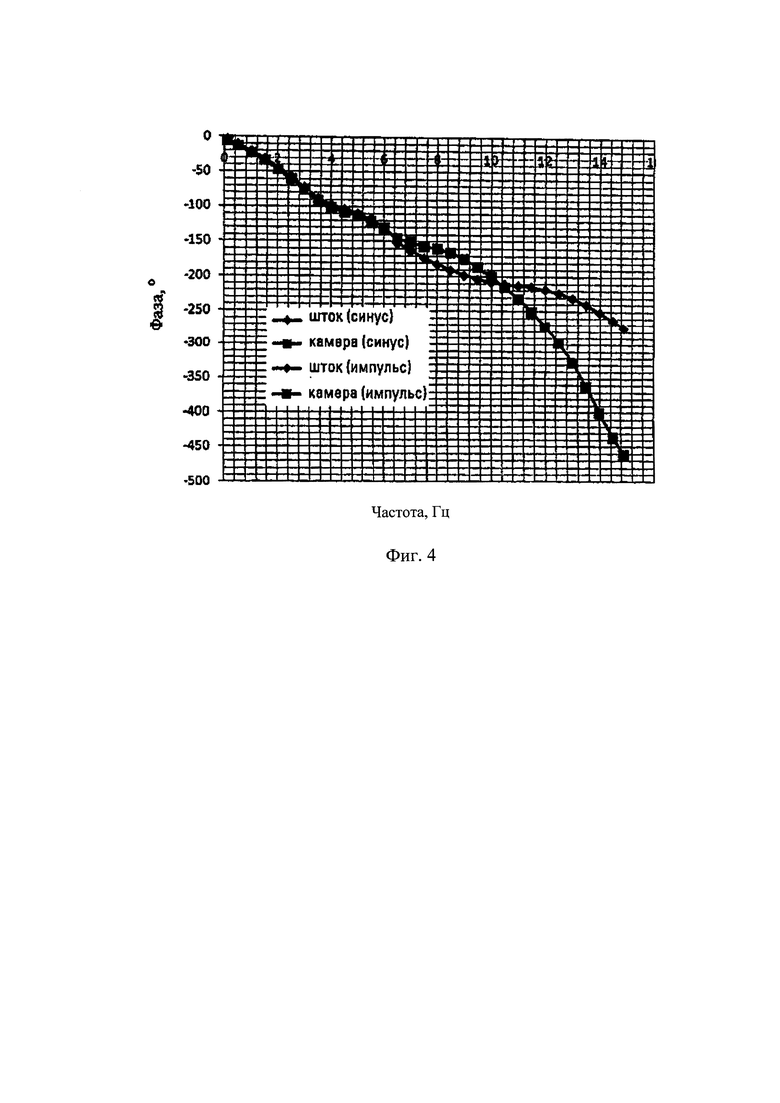
Результаты расчетов приведены на Фиг.3 и Фиг.4.
Сравнение полученных значений по амплитудам и фазовым запаздываниям удовлетворяет заданным требованиям (не более 25° по фазе и не более 1,2 по амплитуде).
Следовательно, по результатам испытаний может быть выдано заключение о пригодности тракта управления к пуску РН.
Краткое описание фигур
На Фиг. 1 представлена типовая блок-схема рулевого тракта управления, состоящая из следующих элементов:
1. Электрогидравлический сервопривод.
2. Механическая связь сервопривода.
3. Камера двигательной установки.
4. Силовой гидроцилиндр.
5. Электро-магнитный преобразователь.
6. Двухкаскадный гидроусилитель.
7. Сопло-заслонка.
8. Золотник.
На Фиг. 2 представлена форма и длительность импульсного сигнала.
На Фиг. 3 представлена амплитудно-частотная характеристика рулевого тракта относительно перемещений штока гидросистемы и камеры двигателя при сигнале управления, равном 5 мА.
На Фиг. 4 представлена фазочастотная характеристика рулевого тракта относительно перемещений штока гидросистемы и камеры двигателя при сигнале управления 5 мА.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475861C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480840C2 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ДВУХКАНАЛЬНЫЙ САМОНАСТРАИВАЮЩИЙСЯ АВТОПИЛОТ ДЛЯ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТЫ | 1999 |
|
RU2177170C2 |
| СПОСОБ ПЕРЕДАЧИ ТЕЛЕМЕТРИЧЕСКОЙ ИНФОРМАЦИИ, АДАПТИРОВАННЫЙ К НЕРАВНОМЕРНОСТИ ПОТОКА ДАННЫХ ТЕЛЕИЗМЕРЕНИЙ, И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2480838C2 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2114387C1 |
Изобретение относится к ракетно-космической технике, в частности к исполнительным приводам системы управления жидкостных ракет тяжелого класса. Контроль динамических характеристик рулевых трактов управления осуществляется путем подачи сигналов на вход рулевого тракта, регистрации сигналов на выходе и вычисления амплитудно-фазовой частотной характеристики. Проводят испытания с входным воздействием синусоидальной формы на частоте 1 Гц и импульсным сигналом, затем вычисляют амплитудно-фазовую характеристику и сравнивают с допустимыми значениями. В случае соответствия выдается заключение о пригодности рулевого тракта к пуску РН. Достигается получение динамических характеристик рулевых трактов на штатных летных конструкциях, обеспечивающее высокое качество и надежность результатов, не превышая допустимый уровень нагружений на эти конструкции. 4 ил.
Способ контроля динамических характеристик рулевых трактов управления, заключающийся в том, что на вход рулевого тракта подают сигналы, регистрируют сигналы выхода и вычисляют амплитудно-фазовую частотную характеристику, отличающийся тем, что предварительно определяют допустимые величины фазовых запаздываний и коэффициентов передачи по амплитуде для требуемых частотных диапазонов, затем, при проведении испытаний, подают на вход рулевого тракта управления входное воздействие синусоидальной формы на частоте 1 Гц длительностью 3 с, затем, после завершения переходных процессов, подают импульсный сигнал длительностью 0,05 с, регистрируют сигналы реакции рулевого тракта на поданные входные сигналы, далее для каждого вида сигнала вычисляют амплитудно-фазовую характеристику как отношение сигнала на выходе, представленного в виде функции частоты, к известному заданному сигналу на входе, также представленному в виде функции частоты, после чего сравнивают полученные значения по амплитуде и фазе с допустимыми величинами и, в случае непревышения допустимых величин, выдается заключение о пригодности данного рулевого тракта управления к пуску РН.
| Способ получения амплитудно-фазовых частотных характеристик электрогидравлического привода | 1978 |
|
SU682680A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ СЛЕДЯЩИМ ПРИВОДОМ | 2009 |
|
RU2430397C2 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| Способ проекции фильма при помощи проектора с оптическим компенсатором | 1944 |
|
SU73136A1 |
| EP 333808 B1, 24.11.1993. | |||

