Изобретение относится к способу контроля и осуществления точной посадки на посадочную платформу, в том числе станции базирования или стартового контейнера, беспилотным летательным аппаратом и предназначено для обеспечения точной посадки беспилотного летательного аппарата (БЛА) на посадочную платформу базовой станции или стартового контейнера.
Из уровня техники известна система посадки беспилотного летательного аппарата по патенту US5716032 (приоритет от 22.04.1996 г., МПК B64C 13/20, B64C 39/00, B64C 39/02, G05D 1/00, G05D 1/06; правообладатель: United States of America as represented by the Secretary of the Army), включающая в себя средство обработки изображений, находящееся в процессоре компенсации движения, который вычисляет параметры летательного аппарата. Рассчитанные параметры представляют собой высоту, изменения высоты, изменения угла тангажа и рыскания, угла крена и изменений к ним, а также изменения поперечного диапазона и положения в нижнем диапазоне. Эти расчеты основаны на движении элементов в видео датчика изображения на борту летательного аппарата. Процессор компенсации движения также измеряет расстояние (в пикселях или элементах изображения) между двумя маяками, расположенными на известном расстоянии друг от друга по обе стороны от видимой точки приземления. Процессор управления восстановлением использует эти параметры для вычисления как желаемой, так и фактической высоты в зависимости от дальности от транспортного средства до видимой точки приземления и для обеспечения ошибки смещения по азимуту от желаемой траектории полета до зоны посадки. Процессор управления восстановлением также вычисляет команды для автоматического пилота на беспилотном летательном аппарате, который корректирует траекторию полета летательного аппарата. Процессор управления восстановлением обычно располагается вместе с процессором компенсации движения либо на земле, либо на летательном аппарате. Видеоизображение может быть передано на землю по линии передачи данных или обработка изображения может быть выполнена на борту летательного аппарата.
Недостатками данной системы являются:
1. Расчеты изменения высоты, изменения угла тангажа и рыскания, угла крена и изменений к ним, изменения поперечного диапазона и положения в нижнем диапазоне основаны на движении элементов видеодатчика изображения на борту летательного аппарата, что дает высокую погрешность и, в некоторых случаях, полную невозможность анализа параметров.
2. Измерение расстояния между двумя маяками, расположенными на известном расстоянии друг от друга по обе стороны от видимой точки приземления, что увеличивает количество компонентов инфраструктуры, усложняет конструкцию применимой системы, а также исключает мобильность системы в связи с необходимостью дополнительной установки маяков вне базовой станции или стартового контейнера.
3. Потребность в больших ресурсах для вычислений на борту летательного аппарата, что увеличивает расход энергии, массу БЛА и ухудшает лётно-технические характеристики используемого БЛА.
Также из уровня техники известен способ управления посадкой БЛА в зоне посадки (патент US20170045894 от 16.09.2015, МПК B64C 39/02, G05D 1/10, G08G 5/00, G08G 5/04, G06K 9/00, G08G 5/02. Патентообладатель: QUALCOMM Incorporated), выполняемый процессором БЛА для управления посадкой в зоне посадки, включающий получение непрерывных данных с датчиков в реальном времени, обнаружение целевой посадочной площадки во множестве посадочных площадок в зоне посадки, вычисление координат ориентации и положения для посадки на основе данных непрерывного датчика в реальном времени, при этом получение информации относительно положения и векторе полета происходит через приемопередатчик, установленный на борту БЛА. После идентификации БЛА в зоне посадки процессором БЛА для управления посадкой отрабатывается обнаружение альтернативного целевого посадочного отсека, доступного для приземления, из множества посадочных отсеков на основе данных, на основе непрерывно поступающих данных датчиков в реальном времени. Корректировка перспективы БЛА происходит путем изменения высоты над зоной посадки, изменение шага, крена и/или настройку рыскания БЛА в соответствии с получаемыми данными с датчиков в режиме реального времени.
Недостатками данного способа являются:
1. Вычислительные мощности на борту БЛА увеличивают расход потребляемой БЛА энергии, температуру внутри корпуса БЛА, что может пагубно сказываться на электронных компонентах, массу БЛА, как следствие, снижает ЛТХ БЛА.
2. Для посадки в качестве датчика и аэросъемки требуются видеокамеры с разными характеристиками. Использование одной камеры снижает характеристики фото-видеосъемки, использование более одной камеры – резко увеличивает стоимость БЛА, расход энергии и снижает ЛТХ.
Из уровня техники известен способ посадки беспилотного летательного аппарата (US20150051758 от 06.12.2013, МПК G08G 5/02; правообладатель: KOREA AEROSPACE RESEARCH INSTITUTE), включающий распознавание метки, установленной на БЛА, по средствам множества датчиков обзора, расположенных вокруг точки посадки беспилотного летательного аппарата, и вычисление относительно местоположения беспилотного летательного аппарата на основе точки посадки с использованием метки, распознающейся камерой. Множество датчиков, установленных вблизи точки посадки, улучшает точность вычисления местоположения беспилотного летательного аппарата. Использование относительного местоположения БЛА и абсолютного местоположения точки посадки, распознавание метки, установленной на БЛА – позволяют осуществить точную посадку БЛА в заданную точку.
Недостатками данного способа являются:
1. Датчики обзора устанавливаются вокруг точки посадки БЛА, что увеличивает количество компонентов инфраструктуры, усложняет конструкцию применимой системы, а также исключает мобильность системы в связи с необходимостью дополнительной установки датчиков обзора вне базовой станции или стартового контейнера.
2. Использование множества датчиков обзора резко понижает надежность системы.
3. Использование метки на БЛА приводит к отсутствию возможности посадки беспилотного летательного аппарата в сложных метеоусловиях.
4. Использование метки, подразумевает её размер, меньший чем размер БЛА, таким образом требуется большее разрешение датчиков обзора и большая вычислительная мощность.
5. Использование метки предъявляет дополнительные требования к конструкции БЛА, такие как наличие доступной для нанесения метки поверхности.
Наиболее близким к заявляемому изобретению является применение оптических элементов для осуществления автоматической посадки летательных аппаратов (патент US20160122038 от 25.02.2015, МПК B64F 1/20, G06T 7/00, B64F 1/00, B64D 47/08, B64D 47/04, H04B 1/3827, B64C 39/02; правообладатель: Singularity University). Согласно данному изобретению Автономная посадка может быть достигнута беспилотными летательными аппаратами с использованием тепловизора и одного или нескольких оптических маркеров на посадочной платформе. Оптические маркеры могут представлять собой прямолинейные монохроматические структуры, которые могут обнаруживаться вычислительной системой на беспилотном летательном аппарате. Кроме того, беспилотный летательный аппарат может быть способен автоматически приземлиться, обнаружив один или несколько оптических маркеров и рассчитав относительное местоположение и / или ориентацию с посадочной платформы.
Недостатками данного способа являются:
1. Использование оптических маркеров на посадочной платформе – в сложных метеоусловиях вычислительная система БЛА может их не увидеть, что затруднит посадку БЛА, что приводит к высокой вероятности отказа системы в зависимости от погодных условий.
2. Нанести оптические маркеры возможно только на ровную поверхность. Использование перфорированной поверхности для устранения эффекта «воздушной подушки» затрудняет использование системы оптических маркеров на посадочной площадке.
3. Потребность в больших ресурсах для вычислений на борту летательного аппарата, что увеличивает расход энергии, массу БЛА и ухудшает лётно-технические характеристики используемого БЛА.
4. Необходимость использования тепловизора, являющегося дорогостоящим, тяжелым и энергоёмким оборудованием.
Задачей изобретения является разработка относительно простого и эффективного способа точной посадки БЛА на посадочную платформу стартового контейнера или базовой станции при хороших погодных условиях, а также при сложных метеоусловиях и/или плохой освещенности.
Техническими результатами способа является точная посадка беспилотного летательного аппарата на посадочную платформу базовой станции или стартового контейнера в том числе при сильном ветре по шкале Бофорта, в темное время суток и/или в условиях высокой освещенности, а также уменьшение массы, температуры на борту и расхода электроэнергии БЛА.
Технический результат в области точной посадки беспилотного летательного аппарата достигается тем, что посадочная платформа базовой станции или стартового контейнера оборудуется системой определения точных координат и ошибки вычисления координат БЛА и передачи корректирующих управляющих сигналов для формирования точной траектории посадки.
Технический результат в области точной посадки беспилотного летательного аппарата в темное время суток и/или в условиях высокой освещенности достигается тем, что посадочная платформа базовой станции или стартового контейнера может быть дополнительно оборудована ИК-камерой, тепловизором и/или светофильтром.
Технический результат в области уменьшения массы температуры на борту и расхода электроэнергии БЛА достигается установкой системы определения точных координат БЛА на посадочной платформе базовой станции или стартового контейнера, что позволяет уменьшить количество используемых на борту БЛА электронных модулей и, соответственно, снизить энергопотребление системами БЛА.
Реализация способа иллюстрируется следующими фигурами:
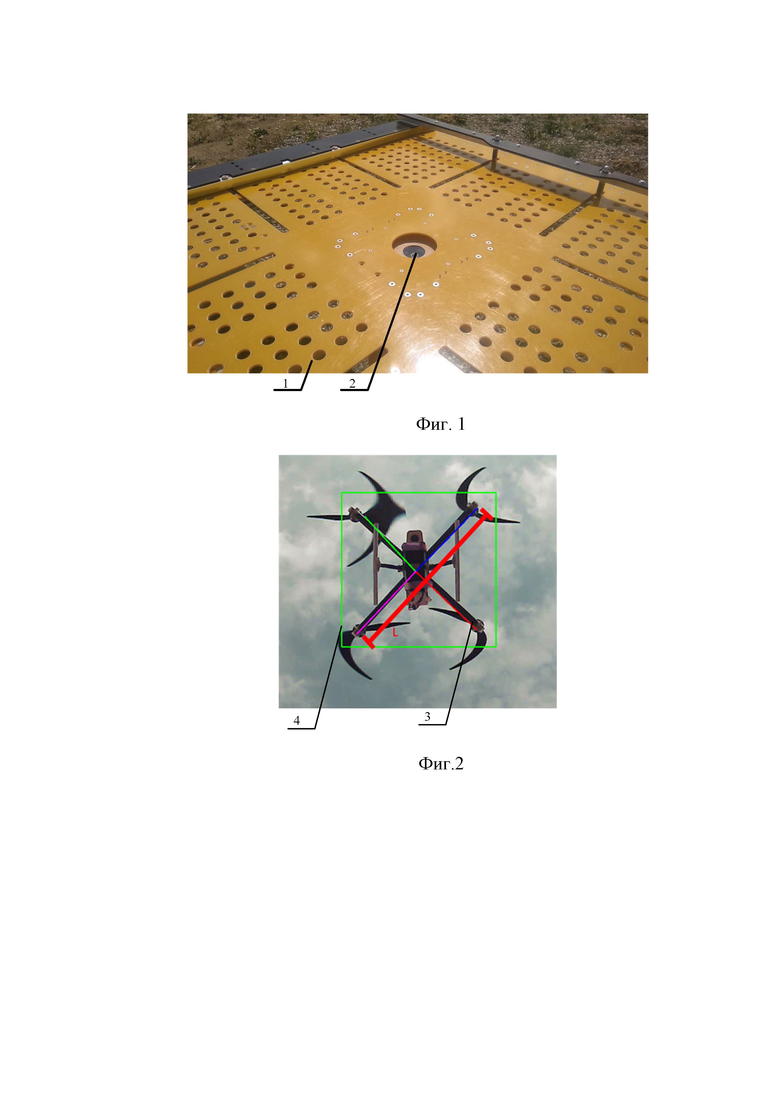
Фиг. 1 – посадочная платформа с установленной видеокамерой
Фиг. 2 – нахождение БЛА в видеокадре.
На фигурах приняты следующие обозначения:
1 – посадочная платформа;
2 – видеокамера;
3 – БЛА в видеокадре;
4 – размер БЛА в видеокадре.
Способ точной посадки беспилотного летательного аппарата на посадочную платформу осуществляется с помощью системы определения точных координат БЛА, использующей установленную и закрепленную любым необходимым и достаточным способом конструктивного соединения, обеспечивающим надежность крепления на посадочной платформе (1) базовой станции или стартового контейнера, по меньшей мере, одну видеокамеру (2), ориентированную в область нахождения БЛА во время захода на посадку (фиг. 1); оборудование связи базовой станции или стартового контейнера, принимающее данные от БЛА и передающее управляющие сигналы для корректировки траектории посадки.
Опционально, но не исключительно, при выполнении посадки в неблагоприятных погодных условиях и в ночное время, БЛА может быть оснащен световыми и/или ИК сигнальными огнями, при этом видеокамера (2) посадочной платформы (1) может быть оснащена ИК и/или светофильтром.
Опционально, но не исключительно, при выполнении посадки в темное время суток и/или в условиях высокой освещенности посадочная платформа (1) базовой станции или стартового контейнера может быть дополнительно оборудована ИК-камерой, тепловизором и/или светофильтром.
Опционально, но не исключительно, видеокамера (2), установленная на посадочной платформе (1) базовой станции или стартового контейнера, может быть оснащена нагревательным элементом для работы в условиях выпадения осадков и/или образования наледи.
Видеокамера (2), используемая в системе определения точных координат БЛА, должна обладать достаточным углом обзора и разрешением, чтобы видеокадр имел чётко различимое изображение БЛА при нахождении его в зоне посадки. Видеокамера (2) соединяется с электронно-вычислительным устройством базовой станции или стартового контейнера, выполняющим функции определения позиции, ориентации и размера БЛА на видеоизображении методами компьютерного зрения (например, методы детектора контуров, HOG, Haar, искусственные нейронные сети).
Формирование управляющих сигналов производится путём сравнения значений пространственных координат и вектора посадки, вычисленных аппаратурой БЛА на основании собственных датчиков и значений пространственных координат и вектора посадки, вычисленных электронно-вычислительной аппаратурой посадочной платформы.
В результате работы алгоритмов компьютерного зрения производится обнаружение области нахождения БЛА (фиг.2) в видеокадре (3) и определяются пять ключевых точек.
Опционально, но не исключительно, ключевыми точками являются центр БЛА и центры моторов. Набор ключевых точек определяется индивидуально для каждой из моделей БЛА и ограничен лишь вычислительной мощностью применяемого оборудования.
После обработки, определяется следующий минимальный набор параметров:
1) центр БЛА на видеокадре с координатами Xb, Yb;
2) размер БЛА L как расстояние между ключевыми точками;
3) вектор направления БЛА в системе координат видеокадра на основе ключевых точек.
Исходя из формул фокусного расстояния видеокамеры, возможно вычисление координат  БЛА в системе координат A, с центром в центре матрицы видеокамеры, плоскостью XY совпадающей с плоскостью матрицы видеокамеры и осью Z, совпадающей с направлением обзора видеокамеры. Определение координат производится по формулам 1-3:
БЛА в системе координат A, с центром в центре матрицы видеокамеры, плоскостью XY совпадающей с плоскостью матрицы видеокамеры и осью Z, совпадающей с направлением обзора видеокамеры. Определение координат производится по формулам 1-3:
 (1)
(1)
где: Za – дистанция до центра БЛА от центра матрицы видеокамеры,
kp – коэффициент проецирования, фиксированное число, зависящее от размера матрицы видеокамеры, разрешения и фокусного расстояния;
L – вычисленное значение размера БЛА в пикселах по данным алгоритмов машинного зрения;
Lr – реальный размер БЛА в метрах.
 (2)
(2)
 (3)
(3)
где: Xa, Ya – координаты БЛА в системе OC
Za – ранее вычисленное расстояние до БЛА
Xb, Yb – координаты БЛА на видеокадре
kp – коэффициент проецирования.
В случае применения широкоугольных объективов видеокамер, формулы 1-3 изменяются для учёта искажающих свойств объектива.
Координаты БЛА  в системе координат C с центром в посадочной платформы, являющиеся точными координатами БЛА, используемые для посадки, определяются по формуле 4:
в системе координат C с центром в посадочной платформы, являющиеся точными координатами БЛА, используемые для посадки, определяются по формуле 4:
(4) 
где: Mac – матрица проецирования из системы координат A в систему координат C.
Для вычисления поправочных коэффициентов управления БЛА с целью корректировки траектории производится вычисление разницы координат БЛА, полученных на борту БЛА на основе собственных датчиков, данных о направлении движения БЛА на основе собственных датчиков, и результатов вычисления координат БЛА электронно-вычислительным устройством посадочной платформы.
Таким образом достигается точная посадка беспилотного летательного аппарата платформу базовой станции или стартового контейнера в том числе при сильном ветре по шкале Бофорта, в темное время суток и/или в условиях высокой освещенности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Устройство для позиционирования беспилотного летательного аппарата на посадочной площадке | 2019 |
|
RU2707465C1 |
| Способ организации воздушного движения группы беспилотных летательных аппаратов в зоне посадки | 2021 |
|
RU2772594C1 |
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| КОМПЛЕКС БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2700107C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2024 |
|
RU2837679C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
Изобретение относится к способу точной посадки беспилотного летательного аппарата (БЛА) на посадочную платформу. Для реализации способа получают видеокадр с чётко различимым изображением БЛА при нахождении его в зоне посадки с помощью видеокамеры, закрепленной на посадочной платформе базовой станции или стартового контейнера, определяют положение БЛА на видеоизображении методами компьютерного зрения. Получают данные о координатах БЛА от датчиков, расположенных на его борту. Производят сравнение данных, полученных на посадочной платформе, и данных с борта БЛА. Передают управляющие сигналы для корректировки траектории посадки с учетом поправочных коэффициентов, полученных на основании сравнения вышеуказанных данных. Обеспечивается повышение точности посадки БЛА. 3 з.п. ф-лы, 2 ил.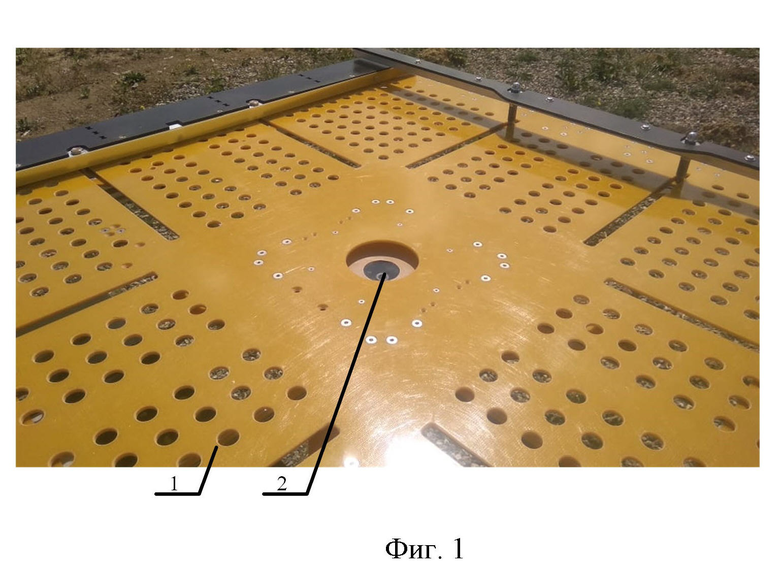
1. Способ точной посадки беспилотного летательного аппарата (БЛА) на посадочную платформу, осуществляемый с помощью системы определения точных координат БЛА, использующей установленную и закрепленную любым необходимым и достаточным способом конструктивного соединения, обеспечивающим надежность крепления на посадочной платформе базовой станции или стартового контейнера, по меньшей мере, одну видеокамеру, ориентированную в область нахождения БЛА во время захода на посадку и обладающую достаточным углом обзора и разрешением, для получения видеокадра с чётко различимым изображением БЛА при нахождении его в зоне посадки, соединенную с электронно-вычислительным устройством базовой станции или стартового контейнера, выполняющим функции определения позиции, ориентации и размера БЛА на видеоизображении методами компьютерного зрения;
оборудование связи базовой станции или стартового контейнера, принимающее данные от БЛА и передающее управляющие сигналы для корректировки траектории посадки;
заключающийся в том, что формирование управляющих сигналов производится путём сравнения значений пространственных координат и вектора посадки, вычисленных аппаратурой БЛА на основании собственных датчиков и значений пространственных координат и вектора посадки, вычисленных электронно-вычислительной аппаратурой посадочной платформы;
при этом алгоритмы компьютерного зрения обнаруживают области нахождения БЛА в видеокадре и определяют центр БЛА в видеокадре с координатами Xb, Yb; размер БЛА L как расстояние между ключевыми точками; вектор направления БЛА в системе координат видеокадра на основе ключевых точек;
с дальнейшим расчетом координат  БЛА в системе координат A с центром в центре матрицы видеокамеры, плоскостью XY, совпадающей с плоскостью матрицы видеокамеры, и осью Z, совпадающей с направлением обзора видеокамеры; и координат БЛА
БЛА в системе координат A с центром в центре матрицы видеокамеры, плоскостью XY, совпадающей с плоскостью матрицы видеокамеры, и осью Z, совпадающей с направлением обзора видеокамеры; и координат БЛА  в системе координат C с центром в посадочной платформе, являющихся точными координатами БЛА, используемыми для посадки; и для вычисления поправочных коэффициентов управления БЛА для корректировки траектории производится вычисление разницы координат БЛА, полученных на борту БЛА на основе собственных датчиков, данных о направлении движения БЛА на основе собственных датчиков и результатов вычисления координат БЛА электронно-вычислительным устройством посадочной платформы.
в системе координат C с центром в посадочной платформе, являющихся точными координатами БЛА, используемыми для посадки; и для вычисления поправочных коэффициентов управления БЛА для корректировки траектории производится вычисление разницы координат БЛА, полученных на борту БЛА на основе собственных датчиков, данных о направлении движения БЛА на основе собственных датчиков и результатов вычисления координат БЛА электронно-вычислительным устройством посадочной платформы.
2. Способ по п. 1, отличающийся тем, что при выполнении посадки в неблагоприятных погодных условиях и в ночное время БЛА может быть оснащен световыми и/или ИК сигнальными огнями, при этом видеокамера посадочной платформы может быть оснащена ИК и/или светофильтром.
3. Способ по п. 1, отличающийся тем, что при выполнении посадки в темное время суток и/или в условиях высокой освещенности посадочная платформа базовой станции или стартового контейнера может быть дополнительно оборудована ИК-камерой, тепловизором и/или светофильтром.
4. Способ по п. 1, отличающийся тем, что видеокамера, установленная на посадочной платформе базовой станции или стартового контейнера, может быть оснащена нагревательным элементом для работы в условиях выпадения осадков и/или образования наледи.
| ОБНАРУЖЕНИЕ СОСТОЯНИЯ С ИСПОЛЬЗОВАНИЕМ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2669656C2 |
| WO 2019067695 A1, 04.04.2019 | |||
| WO 2016197307 A1, 15.12.2016 | |||
| WO 2017059581 A1, (13.04.2017 | |||
| US 0010185321 B2, 22.01.2019. | |||

