Изобретение относится к способу повышения безопасности полетов группы беспилотных летательных аппаратов (БЛА) в зоне ожидания при посадке роевых структур БЛА как минимум на одну посадочную платформу и предназначен для минимизации риска столкновений БЛА в зоне ожидания при их движении в групповой структуре в условиях дестабилизирующих факторов. Оно может быть использовано при модернизации существующих систем посадки роботизированных платформ для БЛА, в условиях посадки роевых структур БЛА, создании перспективных транзитно-оконечных станций обслуживания БЛА при высокой интенсивности их поступления на посадку для обслуживания одной или несколькими платформами и сетевого взаимодействия множества подобных станций.
Одним из направлений повышения безопасности движения БЛА в зоне посадки является исключение человеческого фактора путем применения систем автоматической посадки.
Известен способ точной посадки БЛА на посадочную платформу по патенту RU 2 722 521 C1 (от 2020.06.01, МПК G05D01/06 H04B1/3827 G06T7/55 G01B11/00 B64F1/00). Для реализации способа получают видеокадр с чётко различимым изображением БЛА при нахождении его в зоне посадки с помощью видеокамеры, закрепленной на посадочной платформе базовой станции или стартового контейнера, определяют положение БЛА на видеоизображении методами компьютерного зрения. Получают данные о координатах БЛА от датчиков, расположенных на его борту. Производят сравнение данных, полученных на посадочной платформе, и данных с борта БЛА. Передают управляющие сигналы для корректировки траектории посадки с учетом поправочных коэффициентов, полученных на основании сравнения вышеуказанных данных.
Повышение точности приземления БЛА на платформу по патенту RU 2722249 С1 (от 2020.05.28, МПК B64F 1/22 B64C 39/02) основано на применении устройства позиционирования, которое выполнено в виде ирисовых диафрагм, соединенных с приводом закрывания/открывания, и воронок, причем общее количество ирисовых диафрагм и воронок составляет не более максимального количества опор БЛА.
Недостатком приведенных патентов является решение задачи посадки одиночного БЛА на поверхность платформы и его позиционирование с целью дальнейшего обслуживания, например, замена или зарядка аккумуляторной батареи, перезагрузка грузов и т.п.
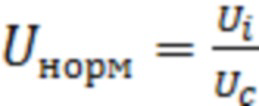
Задача посадки группы (роя) БЛА или множества БЛА с интенсивностью поступления выше скорости посадки одиночного БЛА на посадочную платформу предусматривает использование системы посадки как системы массового обслуживания [Pasechnikov, I. I., Pasechnikov, R. I., Nazarov, A. S., & Rodionov, D. V. (2021, May). Design features of an information-measuring and control system for landing a swarm of small unmanned aerial vehicles. In Journal of Physics: Conference Series (Vol. 1902, No. 1, p. 012128). IOP Publishing], которая имеет обслуживающее устройство 1 (фиг.1) с заданной производительностью G - посадочную платформу с соответствующей системой посадки, реализующую поочередную посадку БЛА с заданной скоростью, устройство накопление 2 (фиг. 1) с максимально допустимым значением очереди N - зону ожидания посадки множества БЛА с предельным значением группы (роя) БЛА и рекомендуемая буферная зона посадки 3 (фиг. 1), которая предназначения для выравнивания скорости БЛА при выходе из зоны ожидания и скорости БЛА при входе на линию посадки. В буферной зоне может находиться более чем один БЛА. В рассматриваемой системе безопасность воздушного движения определяется безопасностью полетов в зоне ожидания БЛА и осуществляется путем назначения в зоне ожидания каждому БЛА независимого замкнутого маршрута, причем в таком маршруте может быть несколько БЛА, но за счет временного распределенного регулирования темпа поступления БЛА на маршруты их столкновение исключается. Однако, при дестабилизирующих факторах, например, порывах ветра и др., защитные интервалы между БЛА нарушаются и возрастает риск аварийной ситуации. Недостатком является отсутствие способа повышения безопасности полетов группы БЛА при посадке на посадочную платформу в условиях дестабилизирующих факторов, приводящих к нарушению траекторий движения БЛА.
В качестве прототипа выбран способ обеспечения безопасности полетов БЛА в составе группы [Kuriki Y., Namerikawa T. Consensus-based cooperative formation control with collision avoidance for a multi-UAV system //2014 American Control Conference. – IEEE, 2014. – С. 2077-2082.].
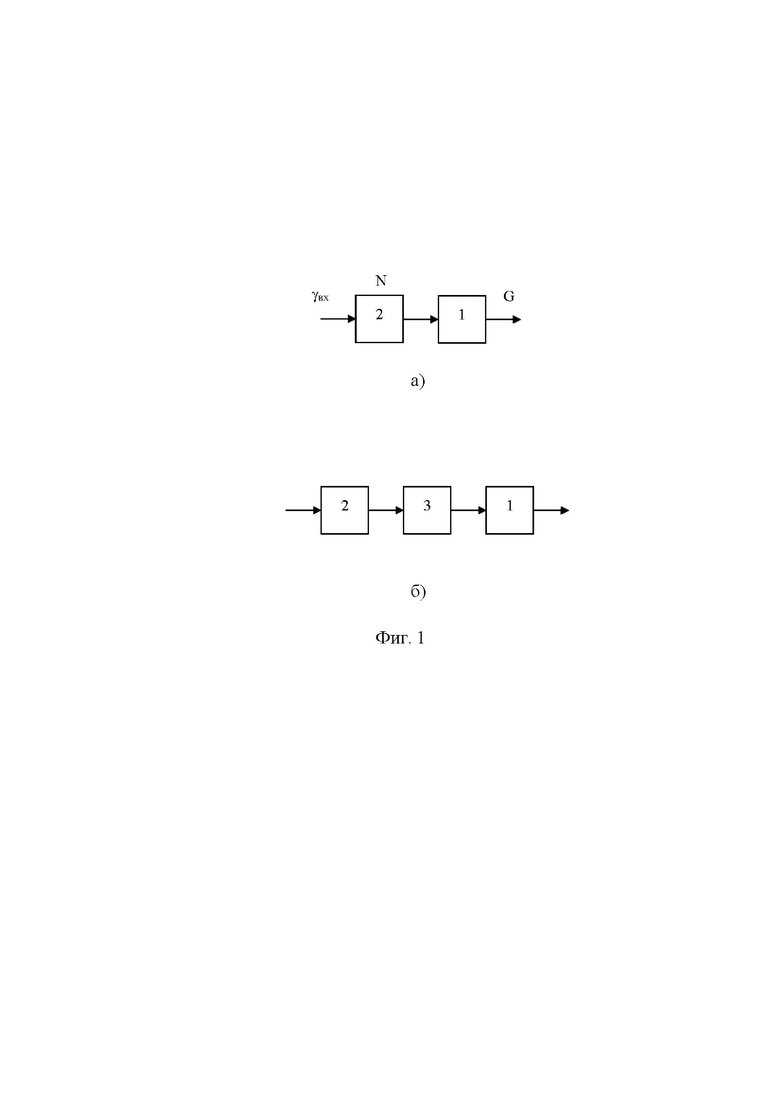
Сущность прототипа заключается в том, что применяется модифицированный алгоритм искусственного потенциального поля для уклонения от столкновений при движении БЛА в группе на основе данных бортовых пассивных сенсоров и корректирующих данных наземной станции обслуживания с активными системами наблюдения за воздушным пространством. БЛА с вертикальным взлетом и посадкой уклоняются только в вертикальном направлении. Как показано на фиг. 2, зона безопасности образована вокруг центра масс летательного аппарата и представляет собой область цилиндрической формы с высотой 2ΔH и радиусом ΔR. Если зона безопасности одного БЛА пересекается с зонами соседних БЛА, то все БЛА с пересекающимися областями начинают производить маневр уклонения. Данное действие производится до момента исчезновения пересечений зон безопасности БЛА.
На фиг. 2 приняты обозначения: ri и hi - положение на горизонтальной плоскости и высота полета i-го БЛА соответственно; |rij| - проекция расстояния между БЛА i и j на горизонтальную плоскость; |hij| - разница высот между ними.
Указанные расстояния определяются выражениями:

 (1)
(1)
Искусственное потенциальное поле, создаваемое БЛА i и j определяется как
 (2)
(2)
где  - положительный коэффициент управления. Как видно из выражения (2), искусственный потенциал возникает при пересечении зон безопасности, при этом его значение становится выше, чем сильнее имеет место пересечение зон безопасности, в частности, при уменьшении разности высот между БЛА i и j. Искусственный потенциал равен нулю, если зоны безопасности БЛА не пересекаются.
- положительный коэффициент управления. Как видно из выражения (2), искусственный потенциал возникает при пересечении зон безопасности, при этом его значение становится выше, чем сильнее имеет место пересечение зон безопасности, в частности, при уменьшении разности высот между БЛА i и j. Искусственный потенциал равен нулю, если зоны безопасности БЛА не пересекаются.
Из (2) находится усредненное потенциальное поле, создаваемое i-м БЛА:
 (3)
(3)
Из (3), полное искусственное потенциальное поле, создаваемое всеми БЛА определяется следующим образом:
 (4)
(4)
В указанной работе предложено введение искусственной силы, создаваемой i-м БЛА для ухода от столкновений с соседними аппаратами:
 (5)
(5)
Здесь нет локального минимума, т.к. полное потенциальное поле Uc сформировано только из отталкивающих потенциальных полей. Выражение (5) в векторной форме имеет вид:
 (6)
(6)
Искусственная сила действует в направлении, противоположном градиенту потенциала, таким образом, уменьшается воздействие потенциального поля и это приводит к увеличению суммы расстояний между БЛА по вертикальной оси.
Недостатком указанного способа является то, что безопасность полетов БЛА в группе обеспечивают решением задачи уклонения от столкновения каждым БЛА, однако, при посадке группы БЛА на как минимум одну посадочную платформу не учитывается возможность информационно-измерительной и управляющей системой посадки изменять структуру группы БЛА в зоне ожидания путем уменьшения их количества в конфликтном пространственном участке.
Целью изобретения является повышение безопасности воздушного движения группы БЛА при посадке как минимум на одну посадочную платформу в условиях дестабилизирующих факторов за счет использования управляющего воздействия системы посадки на конфликтный пространственный участок зоны ожидания.
Предлагаемый способ основан на особенностях системы посадки с наличием зоны ожидания БЛА, а именно: во-первых, посадочная платформа, или система из нескольких посадочных платформ, имеет информационно-измерительную систему посадки, которая с помощью системы контроля воздушного пространства зоны ожидания имеет возможность формировать зоны безопасности для каждого БЛА и вычислять искусственное потенциальное поле опасного сближения, характеризующее степень пересеченности зон безопасности БЛА, во-вторых, в условиях посадки роевой структуры БЛА имеет место непрерывный, периодический процесс вывода из зоны ожидания БЛА в буферную зону посадки, либо непосредственно на линию посадки, для реализации процедуры посадки БЛА как минимум на одну платформу, при этом информационно-измерительной системой организуется множественный доступ БЛА, в том числе с приоритетным обслуживанием. В результате, имеется возможность на основе анализа пересеченности зон безопасности в условиях дестабилизирующих факторов осуществить принудительную посадку как минимум одного БЛА, создающего наибольший риск столкновения в зоне ожидания.
Техническим результатом предлагаемого способа является нахождение зон безопасности для каждого БЛА, нормированных значений потенциалов поля:
 , (8)
, (8)
характеризующего риски столкновения, выбор наибольшего как минимум в одной точке, соответствующей БЛА с наибольшим риском аварийной ситуации, которому подается команда выхода из зоны ожидания для реализации процесса посадки на посадочную платформу.
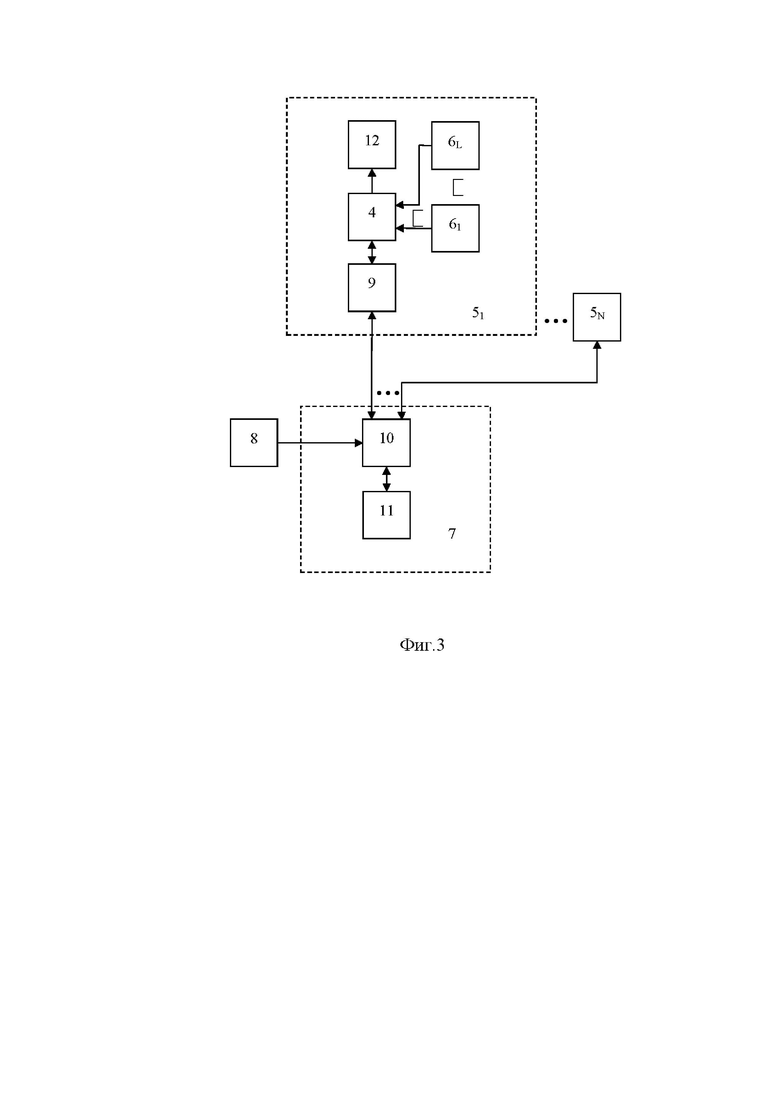
Технический результат достигается тем, что БЛА при опасном сближении с ближайшими летательными аппаратами, в соответствии с алгоритмом уклонения от столкновения, вычисляется потенциал опасного сближения, который передается наземной станции обслуживания в блок управления доступом к системе посадки, где проводится анализ и выбор БЛА с наибольшим значением нормированного потенциала опасного сближения, формирование и передача команды управления на посадку указанного БЛА (фиг.3), либо вычисление геометрических координат всех БЛА в зоне посадки с помощью технических средств контроля воздушного пространства в зоне ожидания и передачи данных в блок управления доступом к системе посадки, в котором вычисляются нормированные значения потенциалов искусственного поля опасного сближения, и по полученным данным вырабатывается решение на выбор как минимум одного БЛА с наибольшим значением нормированного потенциала, для подачи ему команды на посадку (фиг. 4), либо применение одного и второго способов с дальнейшим анализом и сравнением полученных данных, в результате которых определяется БЛА для вывода его из зоны ожидания на посадку.
Отличие предложенного способа от прототипа состоит в том, что безопасность воздушного движения в зоне ожидания в условиях дестабилизирующих факторов повышается не только за счет применения способа уклонения от столкновения БЛА, но и выбором информационно-измерительной системой посадки как минимум одного БЛА с наибольшим риском столкновения и вывода его из зоны ожидания в зону посадки. В результате в точке с наибольшим нормированным потенциалом – в пространственной точке наибольшего риска столкновения, осуществляется прореживание структуры зоны ожидания, как минимум на один БЛА, и как следствие снижается риск столкновения БЛА.
Краткая характеристика рисунков.
На фиг. 1 представлена модель системы посадки роевых групп БЛА на робототехническую платформу в виде системы массового обслуживания, состоящей из основных блоков:
1 – посадочная платформа с заданной производительностью G;
2 – зона ожидания БЛА с количеством БЛА в очереди N;
3 – буферная зона посадки.
Входной поток БЛА является случайным с интенсивностью γвх.
На фиг. 2 приведены зоны безопасности двух ближайших друг к другу БЛА. Принятые обозначения:
ri и hi - положение на горизонтальной плоскости и высота полета i-го БЛА соответственно; |rij| - проекция расстояния между i-м и j-м БЛА на горизонтальную плоскость; |hij| - разница высот между ними; область безопасности цилиндрической формы для БЛА с высотой 2ΔH и радиусом ΔR.
На фиг.3. раскрыта структурная схема способа повышения безопасности полетов БЛА в зоне ожидания при дестабилизирующих факторах на основе получаемых от БЛА данных о потенциалах опасного сближения. Принятые обозначения блоков:
4 – вычислительный блок БЛА;
5 – БЛА;
6 – бортовой пассивный сенсор;
7 – наземная станция обслуживания;
8 – система средств технического контроля воздушного пространства в зоне ожидания;
9 – модем связи БЛА;
10 – модем связи наземной станции обслуживания;
11 – блок управления доступом к системе посадки;
12 – блок формирования сигналов уклонения от столкновения исполнительным устройствам БЛА.
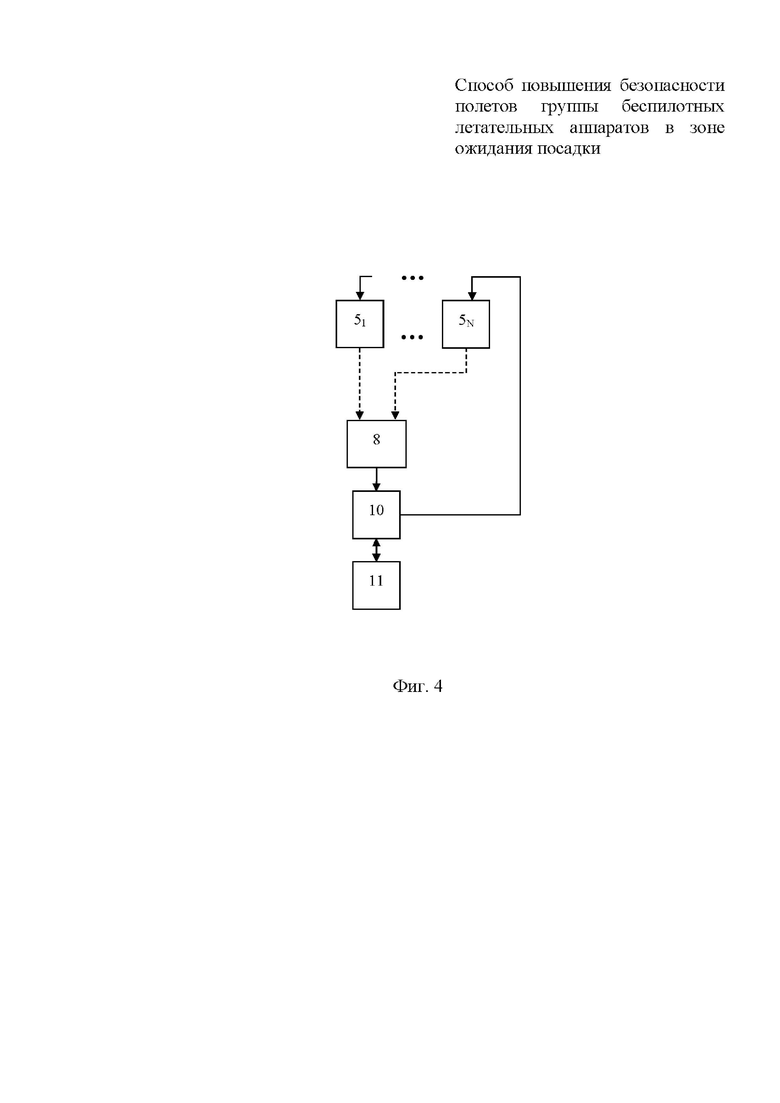
На фиг. 4 показана структурная схема способа повышения безопасности полетов БЛА в зоне ожидания при дестабилизирующих факторах на основе вычисления искусственного потенциального поля опасного сближения БЛА с помощью технических средств контроля воздушного движения в зоне ожидания.
Система посадки групп (роевых структур) БЛА является системой массового обслуживания БЛА, с входным случайным потоком БЛА γвх, состоящей из как минимум одного обслуживающего устройства – посадочной платформы 1 (фиг. 1 а) и накопительного устройства – зоной ожидания БЛА 2 (фиг. 1 а), выход которой соединен со входом посадочной платформы 1. Так как скорость движения БЛА в зоне ожидания 2 отличается от скорости посадки на посадочную платформу 1, то для сопряжения скоростей используется промежуточное звено – буферная зона посадки 3 (фиг. 1 б). В буферной зоне посадки 3 может находиться более чем один БЛА в случае большого количества БЛА в зоне ожидания 2 и высокой скорости обслуживания посадочной платформы 1, либо при наличии более чем одной посадочной платформы 1. БЛА, поступившие в зону ожидания 2 для посадки, двигаются в ней по независимым маршрутам с интервалами таким образом, что зоны безопасности двух ближайших друг к другу БЛА (фиг. 2) не пересекаются, при этом выполняется условие:
 . (9)
. (9)
В а р и а н т 1 повышения безопасности полетов группы БЛА в зоне ожидания при дестабилизирующих факторах (фиг. 3).
Взаимное расположение зон безопасности определяется вычислительным блоком 4 БЛА 5 в процессе его движения на основе данных поступающих от L бортовых пассивных сенсоров 6 и корректирующих данных наземной станции обслуживания 7, полученных с помощью системы средств технического контроля воздушного пространства в зоне ожидания 8. Данные от наземной станции обслуживания 6 поступают в вычислительный блок 4 через модем связи 9 БЛА 5. В случае воздействия дестабилизирующих факторов, когда условие (9) соседних БЛА 5 не выполняется, вычислительным блоком 4 i-го БЛА 5, в соответствии с выражениями (2) и (3) находится усредненный искусственный потенциал опасного сближения, создаваемый i-м БЛА 5. Этот результат пересылается в модем связи 9 БЛА 5 для формирования и отправки сообщения об аварийном сближении со значением потенциала опасного сближения. Сигнал об аварийном сближении со значением потенциала опасного сближения БЛА 5 принимается наземной станций обслуживания 7 с помощью модема связи 10 и передается в блок управления доступом к системе посадки 11. Одновременно с этим, вычислительным блоком 4 БЛА 5 вычисляется искусственная сила, в соответствии с выражением (5), для ухода от столкновений с ближайшими БЛА 5 и передается соответствующий сигнал в блок формирования сигналов уклонения от столкновения исполнительным устройствам 12 БЛА 5. На основе полученных данных от одного и более БЛА 5 с ненулевыми значениями усредненных потенциалов опасного сближения в блоке управления доступом к системе посадки 11 вычисляется искусственное потенциальное поле опасного сближения, определяется БЛА с наибольшим значением нормированного потенциала опасного сближения, вычисленным в соответствии с выражением (8), формируется и отправляется через модем связи 10 ему команда для выхода из зоны ожидания в зону посадки.
В а р и а н т 2 повышения безопасности полетов группы БЛА в зоне ожидания при дестабилизирующих факторах (фиг. 4).
Система средств технического контроля воздушного пространства в зоне ожидания 8 определяет координаты всех N БЛА 5, которые передаются по каналам связи наземной станции обслуживания 7 с помощью модема связи 10 в блок управления доступом к системе посадки 11. В блоке управления доступом к системе посадки 11 вычисляется искусственной потенциальное поле опасного сближения в соответствии с выражениями (2) и (3), определяется как минимум один БЛА 5 с наибольшим нормированным потенциалом опасного сближения, с использованием выражения (8), формируется и передается с помощью модема связи 10 ему команда для выхода из зоны ожидания в зону посадки.
В а р и а н т 3 повышения безопасности полетов группы БЛА в зоне ожидания при дестабилизирующих факторах.
В условиях воздействия дестабилизирующих факторов БЛА 5 с отличными от нуля вычисленными значениями усредненных потенциалов поля опасного сближения передают сигналы аварийного сближения с усредненными значениями потенциалов опасного сближения по каналам связи наземной станции обслуживания 7 в блок управления доступом к системе посадки 11, одновременно с этим данные о координатах всех БЛА 5 от системы средств технического контроля воздушного пространства в зоне ожидания 8 по каналам связи также поступают на наземную станцию обслуживания 7 в блок управления доступом к системе посадки 11, где вычисляется потенциальное поле опасного сближения и нормированные потенциалы на основе данных, полученных путем измерений и от БЛА 5, осуществляется сравнительный анализ и определяется как минимум один БЛА 5 с наибольшим значением нормированного потенциала опасного сближения, формируется и передается с помощью модема связи 10 ему команда на выход из зоны ожидания в зону посадки.
Доказательством технической реализуемости является наличие необходимых технических и вычислительных ресурсов как минимум информационно-измерительной системы посадки роя БЛА, измерительной аппаратуры и беспроводных систем связи в зоне посадки между блоком управления доступом к системе посадки и множеством БЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-измерительная и управляющая система посадки группы беспилотных летательных аппаратов на посадочную платформу | 2022 |
|
RU2784221C1 |
| Способ посадки группы беспилотных летательных аппаратов со случайной структурой на посадочную платформу | 2021 |
|
RU2776621C1 |
| СИСТЕМА С УСТРОЙСТВОМ АВИАЦИОННОЙ ЭЛЕКТРОНИКИ И НАЗЕМНОЙ СТАНЦИЕЙ ДЛЯ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ, ОТКЛОНИВШИМСЯ ОТ МАРШРУТА, И ДЛЯ АВАРИЙНОЙ СВЯЗИ | 2003 |
|
RU2318243C2 |
| СПОСОБ МОНИТОРИНГА ВОЗДУШНОГО ДВИЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ MESH-СЕТИ | 2021 |
|
RU2788046C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2022 |
|
RU2798159C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| ПОЛИЭРГАТИЧЕСКИЙ ТРЕНАЖЕРНЫЙ КОМПЛЕКС ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2524508C1 |
| СПОСОБ ПОСАДКИ СВЕРХЛЕГКОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2307047C1 |
Изобретение относится к способу организации воздушного движения группы БЛА в зоне посадки. Для организации воздушного движения измеряют на БЛА расстояния по горизонтали и высоте между соседними БЛА, вычисляют для каждого БЛА искусственное потенциальное поле опасного сближения и значение искусственной силы, создаваемой каждым БЛА в группе, для ухода от столкновений, которые передают наземной станции обслуживания, где вычисляют нормированные значения потенциалов опасного сближения и искусственное потенциальное поле опасного сближения, формируют и передают БЛА с наибольшим значением нормированного значения команду на выход из зоны ожидания в зону посадки. Обеспечивается повышение безопасности полетов в зоне посадки. 2 з.п. ф-лы, 4 ил.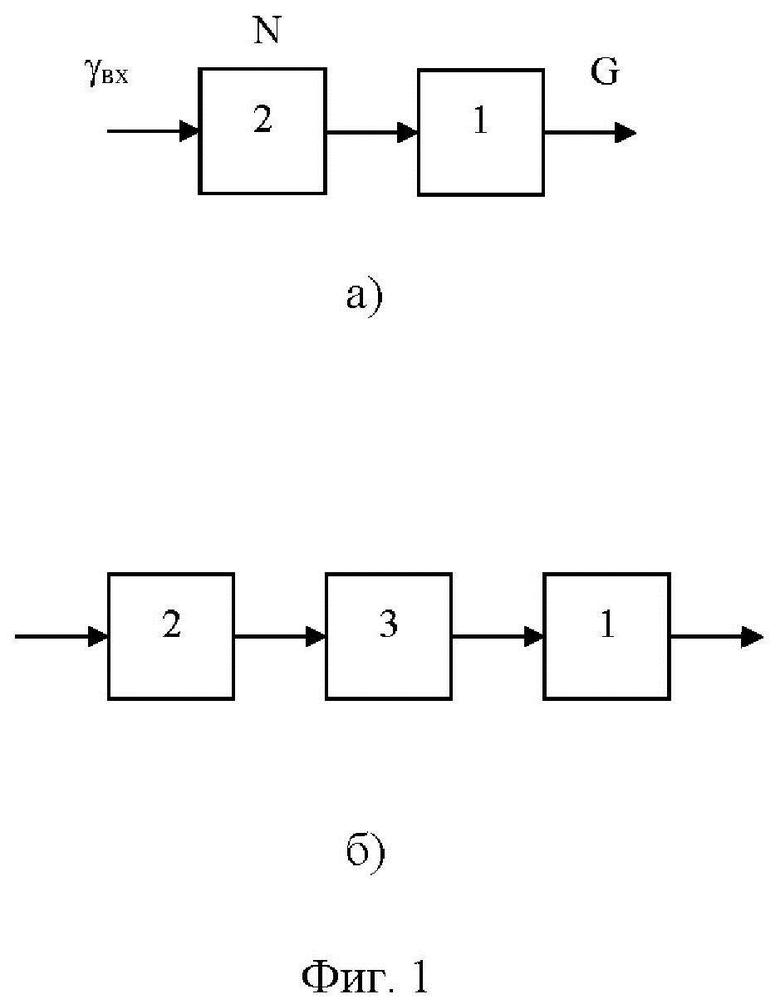
1. Способ организации воздушного движения группы БЛА в зоне посадки, заключающийся в измерении БЛА расстояний по горизонтали и по высоте между соседними БЛА, на основе заданных размеров зоны безопасности вокруг центра массы БЛА и полученных значений измерений вычисляют для каждого БЛА искусственное потенциальное поле опасного сближения, характеризующее степень пересеченности зон безопасности БЛА, с использованием которого вычисляют значение искусственной силы, создаваемой каждым БЛА, находящимся в группе, для ухода от столкновений с соседними БЛА, отличающийся тем, что с целью повышения безопасности воздушного движения группы БЛА в зоне ожидания полученные значения потенциала поля опасного сближения БЛА передают наземной станции обслуживания, где вычисляют нормированные значения потенциалов опасного сближения и искусственное потенциальное поле опасного сближения, определяют как минимум один БЛА с наибольшим значением нормированного значения потенциала опасного сближения, формируют и передают ему команду на выход из зоны ожидания в зону посадки.
2. Способ по п.1, отличающийся тем, что системой средств технического контроля за воздушным пространством в зоне ожидания находят координаты всех БЛА и передают наземной станции обслуживания, где определяют зоны безопасности вокруг центра масс БЛА для всех БЛА, вычисляют нормированные значения потенциалов опасного сближения и потенциальное поле опасного сближения БЛА в зоне ожидания, определяют как минимум один БЛА с наибольшим значением нормированного потенциала, которому формируют и передают команду на выход из зоны ожидания в зону посадки.
3. Способ по п.1, отличающийся тем, что полученные значения потенциалов поля опасного сближения БЛА передают наземной станции обслуживания, одновременно с этим данные о координатах всех БЛА от системы средств технического контроля воздушного пространства в зоне ожидания также поступают наземной станции обслуживания, где вычисляют потенциальное поле опасного сближения на основе полученных измерений, осуществляют сравнительный анализ полученных данных от БЛА и вычисленных, определяют как минимум один БЛА с наибольшим значением нормированного потенциала, формируют и передают ему команду на выход из зоны ожидания в зону посадки.
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| НАЗЕМНЫЙ ПУНКТ УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМИ КОМПЛЕКСАМИ | 2017 |
|
RU2661264C1 |
| US 20200027360 A1, 23.01.2020 | |||
| US 10332406 B2, 25.06.2019. | |||

