Изобретение относится к электротехнике, а более конкретно, к системам посадки беспилотных летательных аппаратов (БЛА) вертикального взлета и посадки мультироторного типа.
Известна система посадки воздушного робота (US 4523729, B64F 1/04, 18.06.1985), включающая в себя козловые средства, имеющие базовую часть для прикрепления к наземной станции и дистальной части, растягивающийся в продольном направлении элемент, шарнирно установленный на указанной дистальной части, первое средство срабатывания, действующее для осуществления расширения и сжатия указанного растяжимого элемента, второе приводное средство, предназначенное для осуществления поворотного перемещения упомянутого растяжимого элемента относительно упомянутой дистальной части, первое дополнительное средство зацепления, предусмотренное на концевой области, указанный гибкий элемент удален от дистальной части, летательный аппарат, способный зависать, по существу, в неподвижном горизонтальном положении относительно упомянутых козловых средств, второе дополнительное средство зацепления, предусмотренное на воздушном судне в области его центра тяжести, смежного нормальную ось летательного аппарата и приспособленную для разъемного зацепления с упомянутым первым дополнительным средством зацепления, средства управления для восприятия положения второго дополнительного средства зацепления, когда воздушное судно нависает в заданной области захвата, и для работы упомянутого первого и второго приводных средств для направления упомянутого первого дополнительного средства зацепления в зацепление с упомянутым вторым дополнительным средством зацепления, посредством чего для извлечения воздушное судно, указанное первое дополнительное средство зацепления может быть введено в разъемное дополнительное воздушное зацепление с упомянутым вторым средством зацепления, независимо от местоположения воздушного судна в пределах области захвата, для поддержки основной части веса летательного аппарата, а система таким образом, что перевозимый самолет, когда он освобождается посредством разъединения средства зацепления, может принимать положение, поддерживаемое в полете.
Недостатком данного устройства является сложность позиционирования при посадке, а также пониженная надежность из-за сложности конструкции.
Известна система посадки беспилотного летательного аппарата вертикального взлета и посадки (RU 2666975, В64С 39/02, B64F 1/00, 13.09.2018), выбранная в качестве прототипа, и содержащая воздушный модуль, прикрепленный на летательном аппарате, и модуль посадки, при этом воздушный модуль содержит корпус, с размещенным в корпусе блоком электронного управления, шарообразный якорь, размещенный на жесткой стойке, при этом на нижней части якоря выполнены электрические контакты, а модуль посадки выполнен в виде устройства захвата, при этом устройство захвата состоит из купола с установленными в нижней части купола створками, выполненными с возможностью открытия внутрь купола, причем в каждой створке выполнен паз, таким образом, что в закрытом положении створок данные пазы образуют отверстие, в которое плотно помещается стойка якоря воздушного модуля системы посадки, при этом створки выполнены с подпружиненными контактами, блок электронного управления содержит инерциальную систему управления, включающую гироскопы, акселерометры и микрокомпьютер, воздушный модуль прикреплен в верхней или боковой части корпуса беспилотного летательного аппарата, содержит систему наведения, выполненную с возможностью наведения беспилотного летательного аппарата в устройство захвата модуля посадки, состоящую из трех подсистем: приемника глобальных навигационных спутниковых систем, расположенного в верхней части летательного аппарата и выполненного с возможностью подвода беспилотного летательного аппарата в круг действия ультразвуковых датчиков навигации на высоте; по меньшей мере, четырех ультразвуковых датчиков навигации, выполненных с возможностью наведения беспилотного летательного аппарата под устройство захвата системы в круг действия системы технического зрения, один из которых расположен на корпусе летательного аппарата со стороны расположения воздушного модуля системы посадки, и, по меньшей мере, три упомянутых датчика расположены на модуле посадки с образованием локальной системы координат, при этом один из трех упомянутых датчиков расположен на модуле посадки со стороны подлета беспилотного летательного аппарата; системы технического зрения, состоящей из видеокамеры и микрокомпьютера для обработки изображений, при этом видеокамера системы технического зрения установлена на якоре и направлена в сторону устройства захвата или установлена на устройстве захвата и направлена в сторону якоря воздушного модуля системы посадки; при этом на модуле посадки системы выполнены метки для системы наведения, в частности, метки выполнены в виде отдельных разноцветных ламп или светодиодных лент инфракрасного диапазона, расположенных вокруг створок и/или по кромке купола со стороны подлета беспилотного летательного аппарата, причем каждая подсистема системы наведения системы посадки беспилотных летательных аппаратов вертикального взлета и посадки выполнена с большей точностью, чем предыдущая, и выполнена с возможностью отключения с момента начала действия следующей подсистемы, видеокамера выполнена с возможностью передачи изображения оператору в реальном времени, модуль посадки дополнительно содержит источники освещения, в частности фонари, подсвечивающие метки системы наведения, по окружности купола дополнительно выполнены выступы для упора створок в закрытом положении, модуль посадки расположен на стационарном или подвижном объекте и дополнительно снабжен крышей, на поверхности которой расположены элементы солнечных батарей, и снабжен устройством стабилизации, состоящим из электронной платы стабилизации с микрокомпьютером, гироскопами, акселерометрами и магнитометром, и тремя осями створок, на которых установлены один или два мотора, получающие команды от платы стабилизации, модуль посадки расположен в боксе, с возможностью выдвижения основания наземного модуля, которое дополнительно содержит устройство позиционирования, компоненты электронной части управления системой встроены в корпус летательного аппарата, при этом питание системы реализовано от бортовой системы питания летательного аппарата - аккумуляторной батареи, стойка якоря и устройство захвата расположены под углом навстречу друг другу, якорь выполнен с возможностью независимого вращения относительно оси, стойка якоря выполнена с возможностью регулировки длины и угла наклона.
Недостатком данного решения является невысокая надежность системы, связанная с возможностью нарушения электрического контакта электрических контактов якоря с контактными элементами створок модуля посадки и сложность позиционирования, т.к. подвешенный летательный аппарат может совершать маятниковые колебания вследствие воздействия ветровых нагрузок.
Задачей изобретения является упрощение позиционирования при посадке БЛА на зарядную станцию за счет повышения надежности системы посадки БЛА вертикального взлета и посадки, аккумуляторных батарей беспилотного летательного аппарата вертикального взлета и посадки за счет применения бесконтактного заряда аккумуляторных батарей за счет расположения БЛА сверху платформы при посадке.
Технический результат достигается за счет того, что система посадки беспилотного летательного аппарата вертикального взлета и посадки, содержащая воздушный модуль, который содержит корпус, с размещенным в корпусе блоком электронного управления, состоящим из инерциальной системы управления, включающую гироскопы, акселерометры и микрокомпьютер, системы наведения, состоящей из приемника глобальных навигационных спутниковых систем, одного ультразвукового датчика навигации, видеокамеры, прикрепленной на корпусе, микрокомпьютера для обработки изображений и модуль посадки, на котором прикреплены три ультразвуковых датчика навигации с образованием локальной системы координат, при этом один из трех упомянутых датчиков навигации расположен на модуле посадки со стороны подлета беспилотного летательного аппарата, при этом на модуле посадки выполнены световые метки для системы наведения, расположенные по кромке корпуса со стороны подлета беспилотного летательного аппарата, модуль посадки дополнительно содержит источники освещения для подсветки световых меток, модуль посадки расположен на стационарном или подвижном объекте, питание системы реализовано от бортовой системы питания летательного аппарата аккумуляторной батареи, система наведения включает в себя лазерный дальномер, а якорь, прикрепленный к нижней части корпуса, к боковой поверхности которого одними своими концами жестко прикреплены радиальные штанги, а на других концах жестко прикреплены электродвигатели с пропеллерами, выполнен в виде ферромагнитного полого усеченного конуса, большим открытым основанием вниз, на боковой поверхности конуса расположено опорное кольцо, на которое намотана электрическая обмотка, выводы которой соединены с первым и вторым входами выпрямительного блока, первый выход которого соединен с первым контактом контактора, который управляется с помощью устройства управления зарядом, получающим питание от бортовой сети беспилотного летательного аппарата и первым выводом фильтрующего устройства, второй контакт контактора соединен с первой клеммой аккумуляторной батареи, вторая клемма которой соединена со вторым выходом выпрямительного блока и вторым выводом фильтрующего устройства, наземный модуль состоит из верхней горизонтальной квадратной посадочной площадки модуля посадки, по углам которой жестко прикреплены фиксирующие штифты, в центре посадочной площадки жестко прикреплена улавливающая ферромагнитная направляющая цилиндрической формы, верхняя часть которой выполнена в виде усеченного конуса, на боковой поверхности улавливающей ферромагнитной направляющей расположена распределенная зарядная обмотка, выводы которой подключены к преобразователю частоты, жестко прикрепленному к нижнему торцу улавливающей ферромагнитной направляющей, а входы предназначены для подключения к внешней питающей сети.
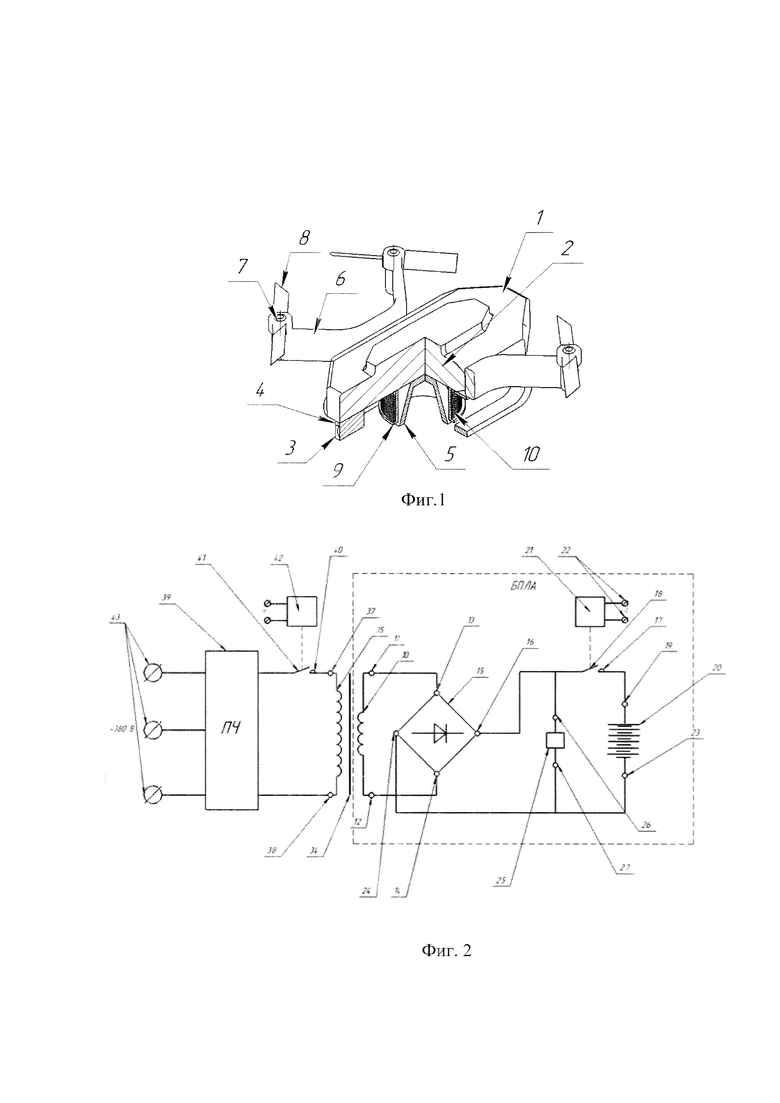
Изобретение поясняется следующими чертежами: на фиг. 1. представлено изометрическое изображение воздушного модуля системы посадки беспилотного летательного аппарата вертикального взлета и посадки, а на фиг. 2 - электрическая схема заряда аккумуляторной батареи воздушного модуля. На фиг. 3 показан модуль посадки системы посадки беспилотного летательного аппарата вертикального взлета и посадки.
Воздушный модуль содержит корпус 1 (фиг. 1), внутри которого размещен блок электронного управления полета 2. Блок электронного управления полета 2 состоит из инерциальной системы управления, которая на чертежах не показана. Инерциальная система управления включает в себя гироскопы и акселерометры. Блок электронного управления полета 2 также содержит систему наведения, состоящую из приемника глобальных навигационных спутниковых систем, одного ультразвукового датчика навигации и микрокомпьютера, которые на чертежах не показаны. На внешней поверхности корпуса 1 прикреплена видеокамера 3, служащая для обработки изображений, (например, видеокамера RunCamSwift2, или FPV RunCamPhoenix 2, или BETAFPV CetusPro). Также к внешней поверхности корпуса 1 воздушного модуля жестко прикреплены лазерный дальномер 4 и якорь 5. Якорь 5 выполнен из ферромагнитного материала в форме полого усеченного конуса большим основанием вниз.
К боковым поверхностям корпуса 1 воздушного модуля жестко прикреплены своими концами радиальные штанги 6 с электродвигателями 7, прикрепленными на их других концах. Электродвигатели 7 имеют пропеллеры 8. В качестве электродвигателей 7 могут использоваться AXI2814/22 037, или Readytosky 2205-2300 2300KV, или RacePro 2306.
На боковой поверхности якоря 5, жестко прикреплено опорное кольцо 9, на котором намотана кольцевая электрическая обмотка 10.
На фиг. 2 штриховой линией отмечена электрическая часть схемы заряда аккумуляторной батареи воздушного модуля. Первый 11 и второй 12 выводы электрической обмотки 10, соединены с первым 13 и вторым 14 входами выпрямительного блока 15, первый выход 16 которого, соединен через контакт 17 контактора 18 с первым входом 19 аккумуляторной батареи 20, например, LiPo 4S1500 mA×h. Управление контактором 18 осуществляется устройством управления зарядом 21, выводы 22 которого соединены с бортовой сетью воздушного модуля, питающейся от аккумуляторной батареи 20. Второй вывод 23 аккумуляторной батареи 20 соединен со вторым выходом 24 выпрямительного блока 15. Фильтрующее устройство 25, например, типа RC-фильтр, своими первым 26 и вторым 27 выводами соединено с первым 16 и вторым 24 выходами выпрямительного блока 15 соответственно. Фильтрующее устройство 25 предназначено для сглаживания выходного напряжения выпрямительного блока 15.
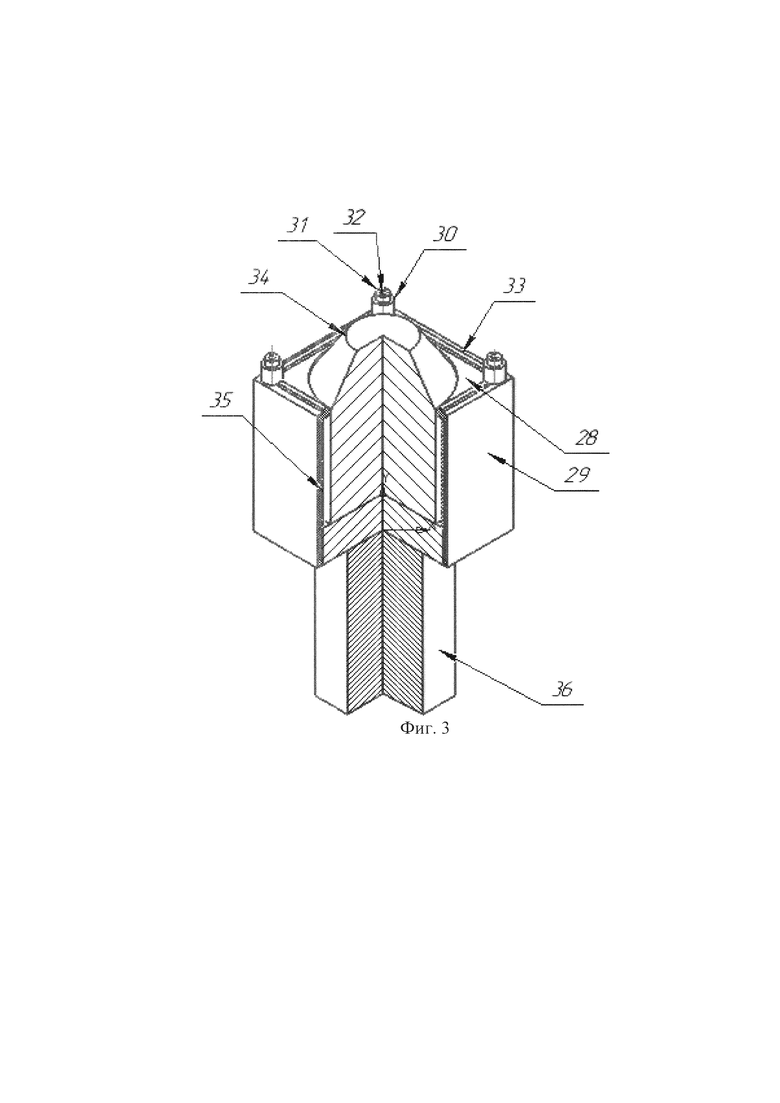
На фиг. 3 представлена наземная часть системы посадки БЛА вертикального взлета и посадки. В центре верхней горизонтальной посадочной площадки 28 модуля посадки 29, по углам жестко прикреплены фиксирующие штифты 30 и три ультразвуковых датчика навигации 31, на чертеже показан один датчик. Два из трех ультразвуковых датчиков навигации 31 жестко прикреплены на модуле посадки, а третий - на воздушном модуле.
Ультразвуковые датчики навигации 31 служат для формирования локальной системы координат, в которую также входят световые метки 32, например, светоотражающие фликеры из катафотной ткани, расположенные по углам посадочной площадки 28. Для более точного позиционирования летательного аппарата посадочная площадка 28 оснащена источниками освещения 33, например, в виде светодиодных лент, жестко прикрепленных по периметру посадочной площадки 28, для подсветки световых меток 32 в пасмурное и темное время суток. На посадочной площадке 28 жестко прикреплена улавливающая ферромагнитная направляющая 34, верхняя часть которой изготовлена в виде усеченного конуса. На боковой поверхности усеченного конуса верхней части ферромагнитной направляющей 34 расположена распределенная зарядная обмотка 35. Весь модуль посадки 29 жестко прикреплен к стойке 36.
Первый 37 (фиг. 2) и второй 38 выводы распределенной зарядной обмотки 35 подключены к преобразователю частоты 39, например, преобразователь частоты А650380 В или Dacond DACF600 630кВт 3Ф 380 В, через контакт 40 контактора 41, управляемого модулем контроля заряда 42, жестко прикрепленному на нижнем торце ферромагнитной направляющей 34. Выводы 43 преобразователя частоты 39 соединены с внешней питающей цепью, которая на чертеже не показана.
Система посадки беспилотного летательного аппарата вертикального взлета и посадки работает следующим образом.
Напряжение питания с аккумуляторной батареи 20 поступает на электродвигатели 7 (фиг. 1) и пропеллеры 8 начинают вращаться. Осуществляется взлет и выполнение полетного задания БЛА.
При разряде аккумуляторной батареи 20 (фиг. 2) блок электронного управления полета 2 (фиг. 1) с сервера наземной станции получает информацию о ближайшем свободном модуле посадки 29 (фиг. 3), и на БЛА подается команда на приземление для заряда аккумуляторной батареи 20 (фиг. 2). По управляющим сигналам блока электронного управления полета 2 (фиг. 1) воздушный модуль БЛА осуществляет подлет к модулю посадки 29 (фиг. 3) системы посадки беспилотного летательного аппарата вертикального взлета и посадки.
По сигналу приемника глобальных навигационных спутниковых систем (GPS/ГЛОНАСС), который на чертежах не показан, при нахождении БЛА рядом с модулем посадки 29, включаются ультразвуковые датчики навигации 31.
На следующем этапе точной посадки используется система технического зрения (фиг. 1), состоящая из видеокамеры 3 и микрокомпьютера для обработки изображений. Видеокамера 3 направлена строго вниз и отслеживает положения меток 32 (фиг. 3).
Видеокамера 3 передает оператору в реальном времени изображение, что дает возможность посадки воздушного модуля в «ручном» режиме и возможности позиционировать воздушный модуль над горизонтальной посадочной площадкой 28 модуля посадки 29 по световым меткам 32, подсвеченными источниками освещения 33, и фиксирующим штифтам 30, повторяя подстройку местоположения воздушного модуля. При этом с помощью лазерного дальномера 4 постоянно измеряются расстояния до четырех фиксирующих штифтов 30. Регулировка положения продолжается до тех пор, пока воздушный модуль не зависнет над центром улавливающей ферромагнитной направляющей 34. Затем по команде оператора воздушный модуль начинает спускаться на модуль посадки и ферромагнитный полый усеченный конус якоря 5 (фиг. 1) сопрягается с улавливающей ферромагнитной направляющей 34 (фиг. 3). После того, когда улавливающая ферромагнитная направляющая 34 полностью входит в якорь 5 (фиг. 1), окончательное позиционирование и фиксация воздушного модуля на модуле посадки на горизонтальной посадочной площадке 28 завершается с помощью фиксирующих штифтов 30 (фиг. 3).
Сигнал о завершении посадки поступает на блок электронного управления полетом 2 (фиг. 1), электродвигатели 7 выключаются.
Процесс заряда аккумуляторной батареи 20 происходит следующим образом.
После посадки воздушного модуля БЛА на горизонтальную посадочную площадку 28 модуля посадки 29 (фиг. 3) модуль контроля заряда 42 (фиг. 2) подает команду на замыкание контакта 40 контактора 41. В результате распределенная зарядная обмотка 35 подключается через преобразователь частоты 39 к внешней цепи 380 В. В то же время на воздушном модуле устройство управления зарядом 21 подает команду на подключение электрической обмотки 10 к аккумуляторной батарее 20.
Ток, протекающий по распределенной зарядной обмотке 35 модуля посадки 29, создает переменное электромагнитное поле, которое, при взаимодействии с электрической обмоткой 10 воздушного модуля, индуцирует в последней электродвижущую силу, посредством которой в цепи заряда аккумуляторной батареи 20 начинает протекать электрический зарядный ток. Для повышения качества зарядного тока в схеме предусмотрено фильтрующее устройство 25. Таким образом, осуществляется заряд аккумуляторной батареи 20.
При этом ферромагнитная направляющая 34 (фиг. 3) и якорь 5 (фиг. 1), выполненный в виде полого усеченного конуса большим основанием вниз, после посадки образуют единый ферромагнитный сердечник и поэтому выполняют не только роль центрирующего устройства, но и уменьшают потери на рассеивание переменного электромагнитного поля, созданного током в распределенной зарядной обмотке 35 (фиг. 2).
При достижении степени заряда аккумуляторной батареи 20 требуемого уровня это регистрируется индикатором уровня заряда, который на чертежах не показан. Индикатор уровня заряда входит в состав блока электронного управления полета 2 (фиг. 1). Блок электронного управления полета 2 генерирует поступающий на устройство управления зарядом 21 (фиг. 2) сигнал на отключение электрической обмотки 10, и заряд аккумуляторной батареи 20 прекращается. Воздушный модуль готов продолжить полет.
Как можно видеть, использование жесткого сцепления улавливающей ферромагнитной направляющей 34 (фиг. 3) и якоря 5 (фиг. 1) с окончательным позиционированием и фиксацией воздушного модуля на модуле посадки на горизонтальной посадочной площадке 28 с помощью фиксирующих штифтов 30 упрощают позиционирование при посадке БЛА, а использование бесконтактного индукционного способа передачи электрической энергии на борт БЛА, обусловливает высокую надежность системы при заряде аккумуляторной батареи 20 (фиг. 2).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система посадки беспилотного летательного аппарата вертикального взлета и посадки | 2017 |
|
RU2666975C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОСАДКОЙ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735196C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БОКС ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ | 2023 |
|
RU2818898C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
Система посадки беспилотного летательного аппарата вертикального взлета и посадки содержит воздушный модуль и модуль посадки. Воздушный модуль содержит корпус с размещенными внутри него инерциальной системой управления, включающей гироскопы, акселерометры и микрокомпьютер, системой наведения, включающей приемник глобальных навигационных спутниковых систем, ультразвуковой датчик навигации, лазерный дальномер, видеокамеру, микрокомпьютер для обработки изображений, при этом к нижней части корпуса прикреплен якорь в виде ферромагнитного полого усеченного конуса с намотанной электрической обмоткой, подключенной к выпрямительному блоку определенным образом, а к боковым поверхностям прикреплены радиальные штанги, на концах которых расположены электродвигатели с пропеллерами. Модуль посадки содержит три ультразвуковых датчика навигации, три световые метки, расположенные по кромке корпуса со стороны подлета беспилотного летательного аппарата, источники подсветки световых меток. Модуль посадки конструктивно выполнен в виде горизонтальной квадратной посадочной площадки, по углам которой жестко прикреплены фиксирующие штифты, а в центре прикреплена улавливающая ферромагнитная направляющая цилиндрической формы, верхняя часть которой выполнена в виде усеченного конуса, на боковую поверхность которого намотана распределенная зарядная обмотка, подключенная определенным образом. Обеспечивается повышение надежности системы посадки, упрощение позиционирования летательного аппарата и зарядки его аккумуляторных батарей. 3 ил.
Система посадки беспилотного летательного аппарата вертикального взлета и посадки, содержащая воздушный модуль, который содержит корпус с размещенным в корпусе блоком электронного управления, состоящим из инерциальной системы управления, включающей гироскопы, акселерометры и микрокомпьютер, системы наведения, состоящей из приемника глобальных навигационных спутниковых систем, одного ультразвукового датчика навигации, видеокамеры, прикрепленной на корпусе, микрокомпьютера для обработки изображений, и модуль посадки, на котором прикреплены три ультразвуковых датчика навигации с образованием локальной системы координат, при этом один из трех упомянутых датчиков навигации расположен на модуле посадки со стороны подлета беспилотного летательного аппарата, при этом на модуле посадки выполнены световые метки для системы наведения, расположенные по кромке корпуса со стороны подлета беспилотного летательного аппарата, модуль посадки дополнительно содержит источники освещения для подсветки световых меток, модуль посадки расположен на стационарном или подвижном объекте, питание системы реализовано от бортовой системы питания летательного аппарата - аккумуляторной батареи, отличающаяся тем, что система наведения включает в себя лазерный дальномер, а якорь, прикрепленный к нижней части корпуса, к боковой поверхности которого одними своими концами жестко прикреплены радиальные штанги, а на других концах жестко прикреплены электродвигатели с пропеллерами, выполнен в виде ферромагнитного полого усеченного конуса, большим открытым основанием вниз, на боковой поверхности конуса расположено опорное кольцо, на которое намотана электрическая обмотка, выводы которой соединены с первым и вторым входами выпрямительного блока, первый выход которого соединен с первым контактом контактора, который управляется с помощью устройства управления зарядом, получающим питание от бортовой сети беспилотного летательного аппарата, и первым выводом фильтрующего устройства, второй контакт контактора соединен с первой клеммой аккумуляторной батареи, вторая клемма которой соединена со вторым выходом выпрямительного блока и вторым выводом фильтрующего устройства, наземный модуль состоит из верхней горизонтальной квадратной посадочной площадки модуля посадки, по углам которой жестко прикреплены фиксирующие штифты, в центре посадочной площадки жестко прикреплена улавливающая ферромагнитная направляющая цилиндрической формы, верхняя часть которой выполнена в виде усеченного конуса, на боковой поверхности улавливающей ферромагнитной направляющей расположена распределенная зарядная обмотка, выводы которой подключены к преобразователю частоты, жестко прикрепленному к нижнему торцу улавливающей ферромагнитной направляющей, а входы предназначены для подключения к внешней питающей сети.
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| СПОСОБ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593207C1 |
| 0 |
|
SU194136A1 | |
| CN 108233439 A, 29.06.2018 | |||
| WO 2016170085 A1, 27.10.2016 | |||
| US 9855852 B2, 02.01.2018. | |||

