Изобретение относится к области радиолокации и может быть использовано для посадки летательных аппаратов, а именно - экранопланов или экранолетов [ЭП и ЭЛ] в различных акваториях в любое время года и суток, в том числе в условиях отсутствия визуальной видимости и в сложных метеоусловиях.
Большая живучесть, высокая скорость (более 600 км/час), и грузоподъемность по сравнению с самолетами, малозаметность при полетах на малой высоте, отсутствие необходимости специальных аэродромов и взлетно-посадочных полос позволяет осуществить эксплуатацию ЭП и ЭЛ для решения многочисленных задач гражданской, военной авиации и МЧС. Например, для быстрого перемещения подразделений в любое время года на значительные дальности (более 1000 км). В ближайшей перспективе количество ЭП и ЭЛ в России возрастет и они должны быть оборудованы бортовой радиолокационной станцией [БРЛС], обеспечивающей безопасность и регулярность полетов, т.к. полеты будут выполняться с помощью БРЛС не только в простых метеоусловиях, но также в сложных метеоусловиях и условиях отсутствия визуальной видимости мест посадки.
Особенностью посадки на взволнованную водную поверхность в условиях отсутствия информации от курсо-глиссадной системы является необходимость определения параметров морского волнения, а также высоты полета над водной поверхностью, что позволит рассчитать и построить посадочный курс и глиссаду планирования для выполнения автономной посадки. [Качур П. Экранопланы. Прошлое, настоящее, будущее. Техника вооружений вчера, сегодня, завтра. Журнал, 2007, ноябрь №11.]
Измерение параметров морского волнения с использованием бортовых радиолокационных устройств обеспечивает оперативность получения информации и имеет важное значение для решений практических задач, в том числе для обеспечения безопасности посадки ЭП и ЭЛ, а также самолетов малой авиации, оборудованных поплавками, в любом районе, водной поверхности. Вопросам определения с борта летательного аппарата высоты, длины и главного направления распространения морских волн уделяется большое внимание, и в настоящее время разработаны различные способы решения отмеченных задач. Например, для определения параметров морского волнения применяется метод, основанный на измерениях спектра флюктуирующих амплитуд радиолокационного сигнала, отражаемого морской поверхностью, который обеспечивает определение средних значений высоты морских волн. Приведенные способы реализуются с использованием сложных специальных вычислителей. [Патент РФ №2 501037 Радиолокационный способ определения параметров волнения водной поверхности.]
Для определения посадочной траектории и посадки в выбранном районе водной поверхности необходимо знание высоты полета. Измерение истинной высоты полета, т.е. высоты относительно поверхности, обычно осуществляется с помощью радиовысотомеров. Известен радиолокационный измеритель малых высот [Патент РФ №2449310], основным отличием которого от других радиовысотомеров является изменение разрешающей способности по дальности сплошного зондирующего сигнала, что обеспечивает возможность измерения малых высот. Однако радиоволны, отраженные от протяженной взволнованной (неровной) поверхности, каковой является водная поверхность, сильно флюктуируют как по амплитуде, так и по фазе, информация о параметрах волнения носит случайный характер и определяется со значительными флуктуационными погрешностями. Поэтому желаемая точность измерений не может быть достигнута.
Известен радиолокационный способ определения высоты для посадки летательного аппарата на водную поверхность, включающий облучение с помощью бортовой радиолокационной станции района водной поверхности, выбранного для посадки, прием отраженных электромагнитных сигналов и отображение их на индикаторе. [Патент РФ №2588105] Этот способ исключает зависимость от коэффициента отражения отдельных или групповых отражателей, расположенных на земной или водной поверхности в пределах облучаемой площадки, и таким образом уменьшает погрешности измерения высоты полета. Но при этом способе не определяют такие важные для посадки ЭП и ЭЛ параметры как характер волнения и высота волны.
Цель изобретения обеспечить безопасность посадки, в том числе в условиях отсутствия визуальной видимости и на взволнованную водную поверхность.
Цель достигается тем, что при радиолокационном способе посадки летательного аппарата, а именно ЭП или ЭЛ на водную поверхность, включающем облучение с помощью бортовой радиолокационной станции района водной поверхности, выбранного для посадки, прием отраженных электромагнитных сигналов и отображение их на индикаторе, с помощью БЛРС в режиме бокового обзора в том числе и в отсутствии видимости обнаруживают волновой характер водной поверхности, измеряют длину морской волны, рассчитывают по известным соотношениям высоту волны, сравнивают со значениями высоты волны, допустимой для посадки конкретного экраноплана или экранолета, и при отсутствии превышения измеренной высоты допустимого значения, осуществляют заход на посадку определяют направление фронта волнения и выполняют полет по глиссаде под 90° к фронту волны,
при этом определяют высоту полета из выражения
H=Lsinα,
где Н - высота полета; α - угол глиссады;
L - протяженность наклонной огибающей отраженных сигналов от водной поверхности, расположенной впереди по курсу полета, когда облучаемая поверхность наблюдается в пределах от малой дальности, соответствующей высоте полета по наклонной до наклонной максимальной дальности, при совпадении измеренной высоты с высотой выравнивания, значение которой установлено для глиссады каждого экраноплана или экранолета, прекращают измерение высоты
Если при сравнении измеренной высоты волны с допустимой для посадки конкретного экраноплана или экранолета, значение измеренной высоты превышает допустимую, посадку не осуществляют.
При нулевом (спокойном) волновом характере заход на посадку по глиссаде можно производить с любого направления по курсу.
Именно в режиме бокового обзора БРЛС даже в отсутствии визуальной видимости можно определить волновой характер водной поверхности и рассчитать высоту волны. Для каждого ЭП и ЭЛ определена высота волны, посадка при которой может быть произведена, поэтому, сравнивая измеренную высоту волны с эталонной, принимают решение о посадке.
Также в режиме бокового обзора БРЛС и в отсутствии визуальной видимости определяют направление фронта волнения и выполняют полет по глиссаде и посадку по направлению 90° к фронту волны. Если же волновой характер спокойный, нулевой, то заход на посадку по глиссаде можно производить с любого направления по курсу.
Если на определенной высоте полета по посадочной траектории будет правильно измерена высота начала выравнивания, заранее установленная для каждого ЭП и ЭЛ, то это обеспечит безопасную посадку, в том числе на выбранный ранее участок взволнованной водной поверхности.
Высоту полета определяют из выражения
H=Lsinα,
где Н - высота полета; α - угол глиссады;
L - протяженность наклонной огибающей отраженных сигналов от водной поверхности, расположенной впереди по курсу полета, когда облучаемая поверхность наблюдается в пределах от малой дальности, соответствующей высоте полета по наклонной до наклонной максимальной дальности.
Измерение высоты полета и ее использование выполняют на конечном участке посадочной траектории при полете по глиссаде до высоты начала выравнивания, и затем осуществляют посадку. При этом значение высоты начала выравнивания установлено заранее и известно летчику из плана полета. Эти значения могут быть различны для каждого типа ЭП и ЭЛ. Измеренную высоту сравнивают с установленной и, когда их значения совпадут, измерение высоты прекращают и производят посадку.
Отмеченные признаки используются впервые и поэтому обладают новизной а также полезностью. В данном случае мы имеем новую совокупность признаков и новую взаимосвязь, что приводит к новому и качественному эффекту.
Изобретение поясняется чертежом, где схематически изображено измерение высоты полета ЭП и ЭЛ.
L - ширина облучаемой площадки, Н - высота полета, α - угол глиссады
При полете на малых высотах с помощью БРЛС облучают и принимают отраженные сигналы в пределах основного и нижнего лепестков диаграммы. направленности антенны, и в результате облучаемая площадка наблюдается в пределах от минимальной дальности (соответствующей высоте полета) до максимальной дальности облучаемой площадки, значение которой определяется шириной диаграммой направленности антенны в вертикальной плоскости с учетом отражения от боковых лепестков.
Следовательно, отраженный от водной поверхности радиолокационный сигнал в пределах наклонной протяженности облучаемой площадки содержит информацию о высоте полета.
Поэтому ширину (протяженность) облучаемой области в режиме посадки (L) можно записать в виде (см. чертеж):
 откуда H=Lsinα,
откуда H=Lsinα,
где L - ширина облучаемой площадки, Н - высота полета, α - угол глиссады
Для определения длины морской волны с помощью БРЛС необходимо остановить (вращающуюся) антенну и установить ее в направлении нормали к фронту морских волн, для обеспечения работы БРЛС в режиме бокового или квазибокового обзора, обеспечивающего стабильность и интегрирование эхо-сигналов.
Зарегистрированные в этом режиме эхо-сигналы отображаются на экране индикатора БРЛС. При различном волнении наблюдается характерная периодическая структура, которая формируется за счет пространственной модуляции радиолокационных сигналов.
Известно, что длину морской волны можно определить, измеряя расстояние между синфазными точками огибающей эхо-сигнала от морской поверхности, например, между соседними максимумами. Период, (Т) и скорость распространения (С) и высота волны определяется из известных соотношений.

где Т - период морской волны; λ - длина волны; g - ускорение силы тяжести  - высота волны с 3% обеспеченностью.
- высота волны с 3% обеспеченностью.
Таким образом возможно определение высоты полета самолета или гидроплана методом измерения наклонного значения (протяженности) длительности огибающей отраженных радиосигналов в пределах диаграммы направленности антенны БРЛС. При этом погрешность измерения высоты указанным методом не зависит от изменения параметров бортовой РЛС (частоты повторения, длительности импульса, поляризации, модуляции).
Разработанный способ измерения высоты обеспечивает помехозащищенность от активных и пассивных помех и может служить для определения высоты полета над водной поверхностью независимо от параметров волнения и направления облучения относительно перемещения волн. Параметр высоты полета обеспечивает возможность расчета посадочной траектории и может быть использован для выполнения посадки в выбранную область водной поверхности.
Полученные данные возможно использовать при решении задачи посадки на морскую поверхность ЭП и ЭЛ, которым в недалеком будущем предстоит эксплуатация не только в гражданской, но также в военной авиации и МЧС.[Суслов М. Экранопланы - светлое будущее или далекое прошлое. Военный парад журнал 2009, январь (т91 №0,1), стр. 48-51.]
Рассмотрим где и как используются в процессе посадки ЭП и ЭЛ параметры водной поверхности, полученные в процессе полета. При наличии волнения водной поверхности необходимо иметь основные характеристики волнения, а именно высоту и длину волны, которую можно измерить с помощью индикатора БРЛС, работающей в режиме бокового обзора. Затем расчетным путем на основе известной формулы определить высоту волнения водной поверхности. Дальше надо провести сравнение этих измеренных характеристик с аналогичными приведенными в перечне основных характеристик ЭП и ЭЛ в разделе «мореходность». Если эти характеристики по высоте и длине волны превышают аналогичные, изложенные в перечне основных характеристик, то в интересах безопасности полета снижение и посадка должны быть прекращены до времени снижения высоты волны на водной поверхности в районе предполагаемого приводнения. При наличии волнения водной поверхности с помощью индикатора БРЛС определяют фронт волнения и направление его движения. При этом полет необходимо совершать в направлении под 90° относительно фронта волны и в этом направлении совершить полет на конечном участке посадочной траектории.
Необходимо также рассчитывать высоту полета в соответствии со способом ранее изложенным в описании изобретения и использовать значение этой высоты при полете по глиссаде на конечном участке посадочной траектории до высоты начала выравнивания (после чего выполняют приводнение). [Шестун А.Н., Ещенко С.Д., Александров В.К., Калыгин Н.С. Пути повышения безопасности и регулярности полетов. Научно-технический журнал «Проблемы безопасности полетов», №12, Москва, 2008 г.]
При отсутствии на водной поверхности волнения необходимо вычислить высоту полета на конечном участке полета и осуществлять полет по глиссаде до высоты начала выравнивания. При этом возможно выполнять полет в любом направлении (по курсу) относительно выбранного ранее участка приводнения. После достижения высоты начала выравнивания измерение высоты прекращают и выполняют посадку.
Следует отметить, что прямолинейный участок снижения по глиссаде (конечный участок) начинается с различных высот для различных ЭП и ЭЛ и различных удалениях от мест приводнения.
Отметим, что для ЭП и ЭЛ существует экспертная система взлета и посадки, которая должна учитывать особенности гидродромов, в том числе глубину, господствующие ветры, волнение и вырабатывать экипажу соответствующие рекомендации. Кроме того, на базе данных экспертной системы должна храниться информация о возможных зонах приводнения (посадки) вне гидродрома со всеми характеристиками направлениями захода на посадку. Необходимо в том числе иметь разработанный план полета в полном объеме от взлета до посадки.
Рассматривая вопрос посадки ЭП и ЭЛ на водную поверхность у некоторых сотрудников возникают предложения по рассмотрению возможности использования для указанных целей существующих способов посадки самолетов на взлетно-посадочную полосу. Отметим, что современная авиация подошла к рубежам, когда существующие наземные, бортовые и космические средства и системы посадки не в состоянии обеспечить требуемый уровень безопасности полетов, взлетов и посадок в сложных метеорологических условиях. А как известно, этап посадки является наиболее трудным при решении проблемы регулярности полетов.
При существующем увеличении количества самолетов и пассажироперевозок необходима разработка новых методов и устройств, обеспечивающих безопасность и регулярность полетов и в том числе взлетов и посадок. [Радиолокационный способ контроля снижения при посадке летательного аппарата в условиях отсутствия визуальной видимости. Патент РФ №2631264, авторы Шестун А.Н., Ещенко С.Д.]
Следует отметить, что когда дефицит времени становится особенно острым, пилот не может объективно критически оценивать полученную информацию, вследствие чего повышается вероятность несвоевременного принятия решения о совершении посадки или ее отмене. Эмоциональное напряжение даже у тренированных пилотов достигает 130% к исходному состоянию.
Для выхода из создавшегося положения необходима разработка прорывных научно-технических решений и технико-экономических технологий, которые позволяют обеспечить безопасность и регулярность полетов как в простых так и в сложных метеоусловиях.
Малогабаритная БРЛС требуется также для решения многочисленных оборонных задач военной авиации и МЧС. В результате появится возможность получения большого экономического выигрыша, который обеспечивается при эксплуатации летательных аппаратов, оборудованных указанной БРЛС за счет следующих факторов:
1. Снижение убытков за счет задержек, отмены и переноса рейсов в плохих метеоусловиях,
2. Выигрыш за счет снижения числа аварий, летных происшествий при совершении посадки в СМУ.
3. Снижение убытков, связанных с отрицательным воздействием на пассажиров морально-психологических факторов и потерей пассажирского времени.
Для ЭП и ЭЛ при заходе на посадку и полете над водной поверхностью в предполагаемом районе приводнения необходимо определить наличие волнения, измерить основные параметры волнения, а также направление фронта волнения и высоту полета с помощью БРЛС в режиме бокового обзора.
Таким образом для обеспечения безопасной посадки ЭП и ЭЛ на водную поверхность в условиях отсутствия визуальной видимости района приводнения подтверждается необходимость оборудования всех летательных аппаратов современной малогабаритной БРЛС.
Предлагаемый способ позволяет обеспечить безопасность и регулярность полетов как в простых так и в сложных метеоусловиях, а также в условиях отсутствия видимости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2214943C1 |
| СПОСОБ ПОДГОТОВКИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ ЛЕТНОГО БАССЕЙНА ГИДРОАЭРОДРОМА ДЛЯ ВЫПОЛНЕНИЯ ВЗЛЕТА И ПРИВОДНЕНИЯ ГИДРОСАМОЛЕТА | 2013 |
|
RU2539039C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2588105C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ВОЛНОВОГО ХАРАКТЕРА ВЕТРОВОГО ВОЗДУШНОГО ПОТОКА | 2017 |
|
RU2677236C2 |
| РАКЕТА АЭРОДИНАМИЧЕСКОЙ СХЕМЫ "УТКА" И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ | 2005 |
|
RU2327101C2 |
| Способ автономного формирования посадочной информации для летательного аппарата и устройство для его осуществления | 1991 |
|
SU1836642A3 |
| СИСТЕМА КОНТРОЛЯ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1994 |
|
RU2092887C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ КОНТРОЛЯ СНИЖЕНИЯ ПРИ ПОСАДКЕ ВОЗДУШНОГО СУДНА В УСЛОВИЯХ ОТСУТСТВИЯ ВИЗУАЛЬНОЙ ВИДИМОСТИ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2016 |
|
RU2631264C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |

Изобретение относится к радиолокационному способу посадки летательного аппарата, а именно экраноплана или экранолета на водную поверхность. Для этого облучают с помощью бортовой радиолокационной станции района водную поверхность, выбранную для посадки, принимают отраженные электромагнитные сигналы и отображают их на индикаторе, обнаруживают волновой характер водной поверхности, измеряют длину морской волны, рассчитывают по известным соотношениям высоту волны, сравнивают со значениями высоты волны, допустимой для посадки конкретного экраноплана или экранолета, и, при отсутствии превышения измеренной высоты допустимого значения, осуществляют заход на посадку, определяют направление фронта волнения и выполняют полет по глиссаде под 90° к фронту волны, при этом определяют высоту полета определенным образом. При совпадении измеренной высоты с высотой выравнивания, значение которой установлено для глиссады каждого экраноплана или экранолета, прекращают измерение высоты. Обеспечивается безопасность посадки. 2 з.п. ф-лы, 1 ил.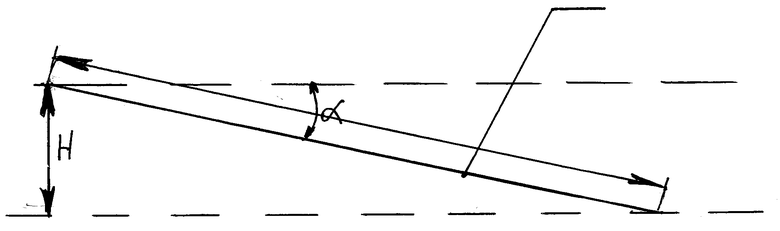
1. Радиолокационный способ посадки летательного аппарата, а именно экраноплана или экранолета на водную поверхность, включающий облучение с помощью бортовой радиолокационной станции района водной поверхности, выбранного для посадки, прием отраженных электромагнитных сигналов и отображение их на индикаторе, отличающийся тем, что с помощью бортовой радиолокационной станции в режиме бокового обзора, в том числе и в отсутствие визуальной видимости, обнаруживают волновой характер водной поверхности, измеряют длину морской волны, рассчитывают по известным соотношениям высоту волны, сравнивают со значениями высоты волны, допустимой для посадки конкретного экраноплана или экранолета, и, при отсутствии превышения измеренной высоты допустимого значения, осуществляют заход на посадку, определяют направление фронта волнения и выполняют полет по глиссаде под 90° к фронту волны, при этом определяют высоту полета из выражения
H=Lsinα,
где Н - высота полета; α - угол глиссады;
L - протяженность наклонной огибающей отраженных сигналов от водной поверхности, расположенной впереди по курсу полета, когда облучаемая поверхность наблюдается в пределах от малой дальности, соответствующей высоте полета по наклонной до наклонной максимальной дальности, при совпадении измеренной высоты с высотой выравнивания, значение которой установлено для глиссады каждого экраноплана или экранолета, прекращают измерение высоты.
2. Способ по п. 1, отличающийся тем, что если при сравнении измеренной высоты волны с допустимой для посадки конкретного экраноплана или экранолета, значение измеренной высоты превышает допустимую, посадку не осуществляют.
3. Способ по п. 1, отличающийся тем, что при нулевом (спокойном) волновом характере заход на посадку по глиссаде можно производить с любого направления по курсу.
| Способ осенне-зимнего и весеннего содержания пчелосемей и устройство для осуществления этого способа | 1958 |
|
SU120077A1 |
| ПОСАДОЧНЫЙ РАДИОЛОКАТОР | 2014 |
|
RU2556708C1 |
| РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ МАЛЫХ ВЫСОТ | 2010 |
|
RU2449310C2 |
| US 0006164591 A1, 26.12.2000 | |||
| US 0005727495 A1, 17.03.1998. | |||

