Изобретение относится к области радиолокации и может быть использовано для определения высоты полета летательного аппарата [ЛА] над земной, водной поверхностью, над поверхностью различных планет, а также при взлете и посадке ЛА.
В настоящее время высота полета ЛА определяется с помощью радиовысотомеров [РВ], которые обладают рядом недостатков, а именно: при измерении высоты полета фактически измеряется дальность от борта ЛА до земной или водной поверхности. С помощью РВ осуществляется излучение и прием эхо-сигналов от различных отражателей, которые расположены на земной или водной поверхности в пределах облучаемой площадки и обладают различными коэффициентами отражения.
За небольшим исключением отражения от земной поверхности можно рассматривать как отражения от большого числа поверхностей, расположенных по случайному закону, а не как зеркальное отражение, даже при углах падения, близких к вертикальным. Уровень эхо-сигналов и дальность до отражателей зависит от рельефа местности в пределах облучаемой площадки, и в процессе полета указанные параметры, в том числе уровень эхо-сигнала и дальность до отражателя, изменяются по случайному закону, поэтому погрешности имеют зависимость от рельефа поверхности.
Погрешности измерения дальности от водной поверхности (т.е. высоты полета над водной поверхностью) возрастают и зависят от направления облучения морских волн, балльности, наличия и характера брызг, перемещения поверхностного слоя воды в зависимости от ветра, турбулентных возмущений и местных течений, при этом возможна полная потеря информации о высоте полета, получаемая в настоящее время с помощью высотомера. Увеличение погрешностей при измерении высоты полета над водной поверхностью при различных гидрометеорологических условиях определяется тем, что изменяются характеристики элементарных отражателей водной поверхности (каковыми являются капиллярные волны, брызги т.п.) при различном волнении водной поверхности, и поэтому, например, бортовой РВ имеет недопустимо большие и переменные погрешности в различных гидрометеоусловиях.
Для решения ряда задач необходимо, чтобы РВ обладал высокой точностью и отсутствием накапливающихся погрешностей, а также чтобы результаты измерения высоты не зависели от помех. Существующие РВ не удовлетворяют перечисленным требованиям [А.Ю. Мишин и др. Проблемы информационного обеспечения системы управления движением беспилотного ЛА. «Мир авионики» №3, 2008].
Известен РВ [патент РФ №2501036], который определяет высоту по временному рассогласованию между синхроимпульсом и передним фронтом отраженного импульса от земной, либо водной поверхности. Для повышения точности измерения высоты используется введение последовательных линий задержек, блока параллельных элементов совпадения, постоянного запоминающего устройства, блока параллельных линий задержек и сумматора. Такой высотомер обладает невысокой точностью измерения, зависит от помех, которые определяются свойствами подстилающей поверхности.
Известен радиолокационный измеритель малых высот [патент РФ №2449310], основным отличием которого от других РВ является изменение разрешающей способности по дальности сплошного зондирующего сигнала, что обеспечивает возможность измерения малых высот. Недостатком является то, что РВ формирует информацию о высоте с погрешностями, которые зависят от свойств подстилающей поверхности, и желаемая точность измерений не может быть достигнута.
Ближайшим техническим решением является способ [патент РФ №2372626] определения высоты полета ЛА, включающий излучение с помощью бортовой РЛС и прием отраженных электромагнитных сигналов от земной или водной поверхности, осуществляемый за счет проведения трехэтапных измерений: грубого измерения дальности на первом этапе, точного измерения дальности на втором этапе, подтверждения результатов точного измерения дальности результатами грубого измерения на третьем этапе. Раскроем содержание этапов, приведенных в патенте на изобретение, выбранном за прототип. Первый этап: излучают зондирующий сигнал в направлении земной поверхности и измеряют временную задержку, определяющую грубое (предварительное) измерение дальности по формуле:
где D - предварительное измерение дальности;
с - скорость распространения сигнала;
t - временная задержка.
Путем поиска и обнаружения сигнала, отраженного от поверхности земли, во временном интервале, соответствующем временному интервалу от минимального до максимального значения измеряемой дальности, разбитому на N парциальных интервалов (N>1) времени. Причем длительность парциального временного интервала устанавливают такой, чтобы она превышала длительность фронта отраженного сигнала.
Поиск сигнала, отраженного от поверхности земли, производят путем накопления отраженных сигналов в N парциальных интервалах времени, каждому из которых соответствует свой селектирующий импульс. Отраженный сигнал считается обнаруженным, когда в одном из селектирующих импульсов происходит превышение порога накопления.
Чем больше значение порога накопления, тем выше вероятность правильного обнаружения и меньше вероятность ложного срабатывания при обнаружении отраженного сигнала. На практике максимальное значение порога накопления ограничено временем, в течение которого сигнал, отраженный от поверхности земли, находится в пределах одного и того же селектирующего импульса.
Поиск отраженного сигнала производят одновременно по всем селектирующим импульсам. Временную задержку измеряют между моментом излучения зондирующего сигнала и фронтом селектирующего импульса, в котором произошло обнаружение отраженного сигнала.
Как показывает анализ, уже на первом этапе измерений высоты полета могут быть заложены погрешности при использовании математической формулы, так как временная задержка определяется (зависит) от выбора отражателей, расположенных на земной или водной поверхности, которые могут иметь отклонения от вертикали и подвержены влиянию внешних воздействий. В описании изобретения приводится способ возможного уменьшения этих погрешностей, но не их устранения.
Радиолокационная дальность до отражателей на земной или водной поверхности принимается за высоту полета ЛА. В связи с тем что отражатели (в пределах диаграммы направленности антенны РВ) располагаются по случайному закону, а интенсивность эхо-сигналов зависит от параметров отражателей и рельефа местности, погрешности измерения дальности не являются постоянными. Поэтому повышение точности измерения дальности до отражателей не всегда обеспечивает повышение точности измерения высоты ЛА, что особенно очевидно при измерении высоты полета над водной поверхностью, когда погрешности зависят от высоты волн, брызг, расположения капиллярных волн, а также от перемещения поверхностных слоев воды, местных течений и т.п. В ряде случаев вообще невозможно определить высоту полета ЛА, например, над взволнованной водной поверхностью.
Цель изобретения - повысить точность измерения высоты, помехозащищенность, существенно снизить погрешности измерения.
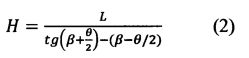
Цель достигается тем, что в радиолокационном способе определения высоты полета летательного аппарата, включающем облучение с помощью бортовой РЛС земной или водной поверхности и прием отраженных от нее электромагнитных сигналов, облучают поверхность с остронаправленной диаграммой направленности антенны, измеряют протяженность облучаемой площадки в направлении вдоль продольной оси летательного аппарата и вычисляют высоту полета летательного аппарата в соответствии с выражением (1), когда отсутствует угол наклона диаграммы направленности антенны в вертикальной плоскости, или в соответствии с выражением (2) при наличии угла наклона диаграммы направленности антенны в вертикальной плоскости

где: Н - высота полета над земной или водной поверхностью,
L - протяженность облучаемой площадки,
θ - ширина диаграммы направленности антенны в вертикальной плоскости,
β - угол наклона диаграммы направленности антенны в вертикальной плоскости.
Целесообразно облучать земную или водную поверхность в нескольких направлениях в пределах 360° с промежутками не менее 45° и вычислять среднее значение высоты полета.
Тогда погрешность измерения высоты будет минимальна, что особенно важно при полетах над взволнованной водной поверхностью. Если промежутки делать меньше, то будет неоправданное увеличение времени измерения.
Для определения высоты при полете над наклонной поверхностью целесообразно облучать поверхность в нескольких направлениях в пределах 360° с промежутками не более 90°, сравнивать значения протяженностей облучения площадок и, при достижении их равенства за счет изменения положения в пространстве ЛА, рассчитывать высоту полета.
Если облучение проводить менее чем на четыре стороны - вперед, назад, влево, вправо - т.е. промежутки делать больше чем 90°, то точность измерения не будет достигнута.
В предлагаемом изобретении измерение высоты полета осуществляется способом, основанным на измерении протяженности облучаемой площадки с помощью бортовой РЛС, и не зависит от комплексной диэлектрической проницаемости отражающей поверхности, от углов падения энергии поляризации и других параметров радиолокационных сигналов. Фиксируются границы протяженности облучаемой площадки, обладающей максимальным размером в продольной плоскости ЛА, высоту которого надо определить. Протяженность облучаемой площади определяется началом и концом радиолокационных отражений от земной или водной поверхности, формируемых различными отражателями, расположенными на земной или водной поверхности в пределах диаграммы направленности антенны. Предлагаемый способ исключает зависимость от коэффициента отражения отдельных или групповых отражателей, расположенных на земной или водной поверхности в пределах облучаемой площадки, и, таким образом, уменьшаются погрешности измерения высоты полета.
В предлагаемом способе имеет место повышение точности измерения дальности за счет приема эхо-сигналов от фиксированных областей, расположенных на максимальной дальности зоны облучения при приеме эхо-сигналов от внешней пограничной области и минимальной дальности при приеме сигналов от внутренней пограничной области облучаемой площадки, т.к. начало и конец облучаемой площадки фиксированы.
Измерение дальностей до отражателей, расположенных внутри облучаемой площадки, не осуществляется, поскольку они являются случайными величинами и приводят к большим погрешностям. В новом способе имеет место повышение помехозащищенности РЛС от воздействия активных или пассивных помех потому, что при измерении начала и конца облучаемой площадки (т.е. ее протяженности) существенно снижается влияние помеховых сигналов, т.к. эхо-сигналы РЛС от границ облучаемых площадок не будут искажаться под воздействием помех, а также не будут зависеть от параметров радиоимпульсов РЛС (длительности импульсов, частоты повторения, поляризации, модуляции и т.п.).
Отмеченные признаки используются впервые и поэтому обладают новизной, а также полезностью. В данном случае мы имеем новую совокупность признаков и новую взаимосвязь, что приводит к новому и качественному эффекту.
Сущность изобретения поясняется чертежами, представленными на фиг. 1-5.
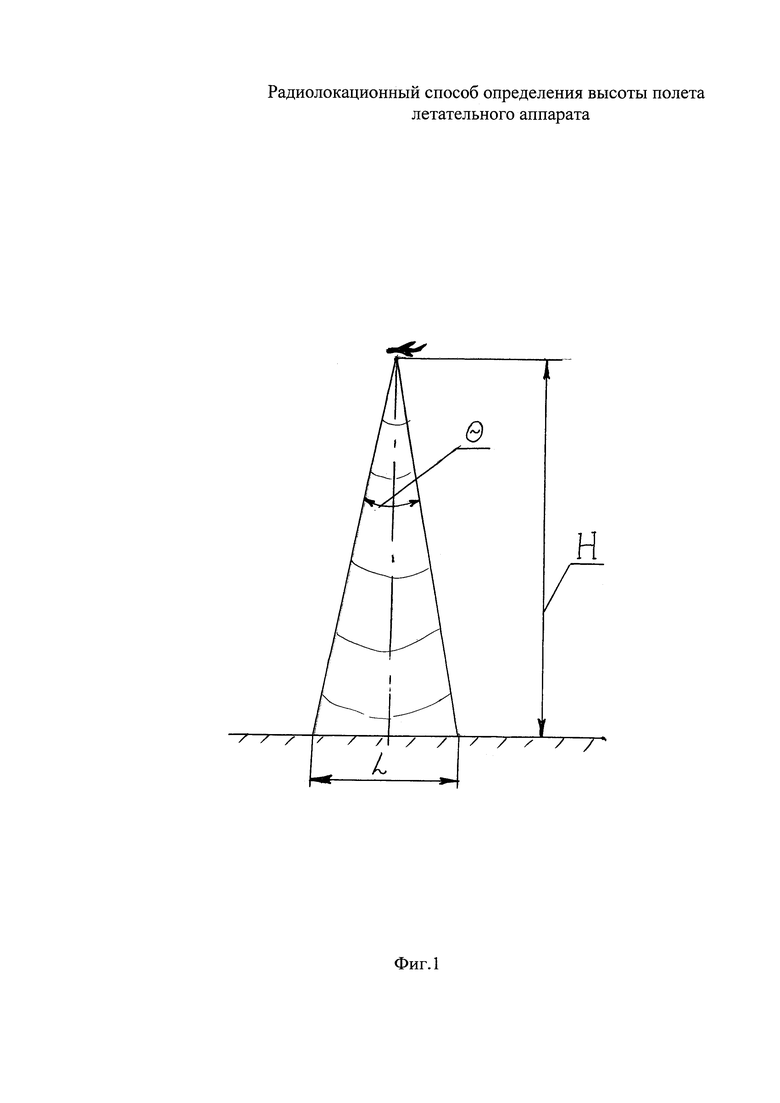
Фиг. 1. Облучаемая горизонтальная площадка в горизонтальном полете при вертикальном расположении луча РВ относительно горизонтальной поверхности; β=0.
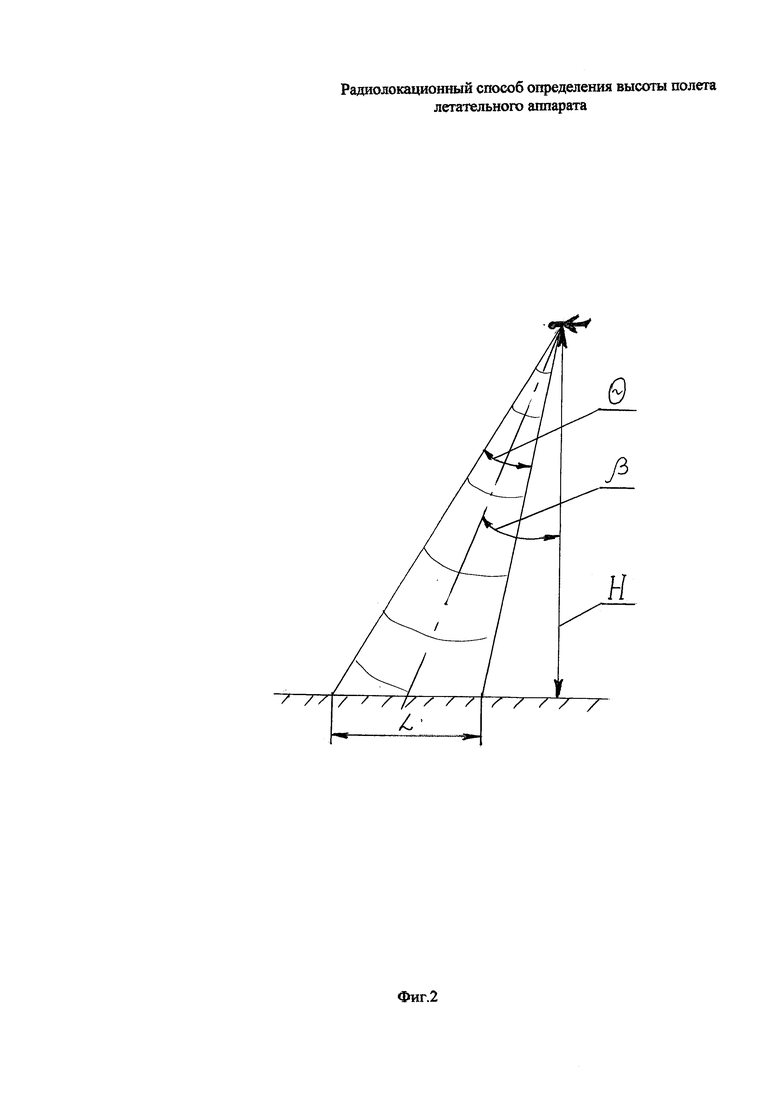
Фиг. 2. Облучаемая горизонтальная площадка в горизонтальном полете при расположении луча РВ под углом относительно вертикали; β≠0.
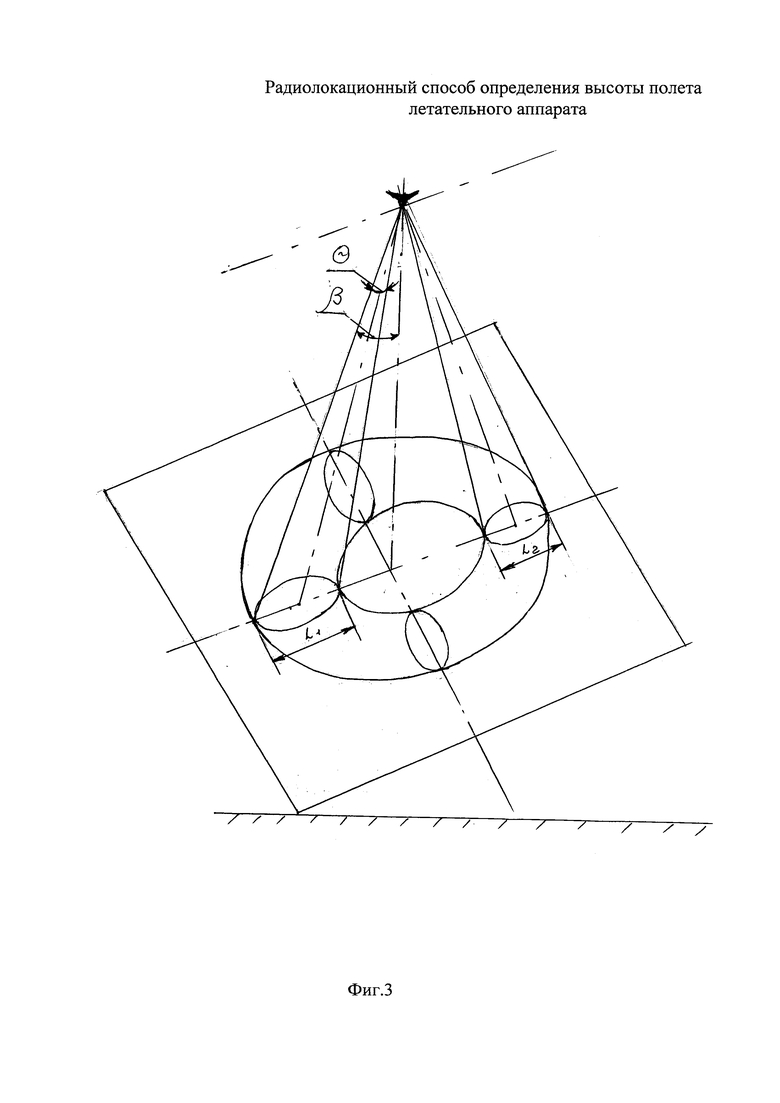
Фиг. 3. Облучаемые наклонные площадки в горизонтальном полете при расположении луча РВ под углом относительно вертикали к горизонтальной поверхности; показано излучение на четыре стороны - вперед, назад, влево, вправо, протяженность облучаемых площадок не равна: L1≠L2.
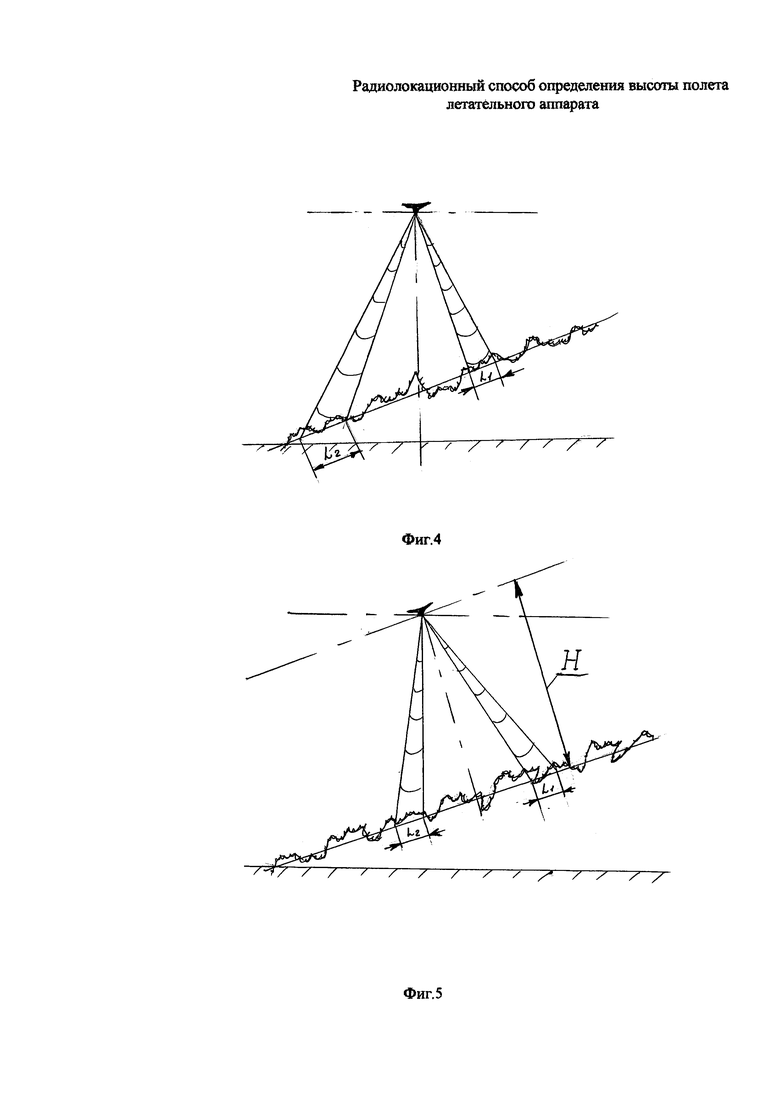
Фиг. 4. Облучаемые наклонные площадки в горизонтальном полете при расположении луча РВ под углом относительно вертикали к горизонтальной поверхности; в данном примере протяженность облучаемых площадок тоже не равна: L1≠L2.
Фиг. 5. Облучаемые наклонные площадки при полете параллельно наклонной поверхности при расположении луча РВ под углом относительно вертикали к наклонной поверхности. В этом примере, за счет изменения положения в пространстве ЛА, протяженности облучаемых площадок сравнялись: L1=L2.
На фигурах 1-5 приведены следующие обозначения:
L, L1, L2 - протяженность облучаемой площадки;
Н - высота полета;
θ - ширина диаграммы направленности антенны РВ;
β - угол наклона диаграммы направленности антенны.
Высоту полета Н, когда отсутствует угол наклона диаграммы направленности антенны в вертикальной плоскости, можно определить, в соответствии с фиг. 1, по формуле (1):

При наличии угла наклона диаграммы направленности антенны в вертикальной плоскости по отношению к земной или водной поверхности, соответственно фиг. 2, высоту полета вычисляют по формуле (2):

Предлагаемый способ обеспечивает возможность измерения высоты полета ЛА над наклонной поверхностью, например в горах или при полетах над другими планетами. Необходимо измерять протяженность облучаемых площадок по различным сторонам ЛА - в нескольких направлениях, например, через 90°. При этом, если облучаемые площадки имеют различную протяженность (фиг. 3, 4), то ЛА должен изменять свое положение в пространстве с целью получения одинаковых протяженностей в продольном и поперечном направлении (фиг. 5). После этого выполняют расчет высоты ЛА над наклонной поверхностью в соответствии с выражениями (1) или (2).
Предлагаемый способ измерения высоты полета ЛА основан на измерении начала и конца облучаемой площадки, то есть ее фиксированной протяженности, в пределах диаграммы направленности антенны РВ. Поэтому существенно уменьшаются погрешности от свойств земной или водной поверхности, появления радиопомех, перемещения отражателей по различным причинам (например, над морем), а также от изменения параметров радиолокационных сигналов (длительности импульсов, модуляции и т.п.).
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА, А ИМЕННО ЭКРАНОПЛАНА ИЛИ ЭКРАНОЛЕТА НА ВОДНУЮ ПОВЕРХНОСТЬ | 2019 |
|
RU2722811C1 |
| СПОСОБ ОЦЕНКИ ВЫСОТЫ ПОЛЕТА ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2499279C1 |
| Способ локации целей в передних зонах обзора бортовых радиолокационных станций двухпозиционной радиолокационной системы | 2019 |
|
RU2703996C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2011 |
|
RU2483324C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2564552C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ВОЛНОВОГО ХАРАКТЕРА ВЕТРОВОГО ВОЗДУШНОГО ПОТОКА | 2017 |
|
RU2677236C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБКИ ИЗМЕРЕНИЯ СКОРОСТИ ЛА ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ И БОРТОВОЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2411538C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
Изобретение относится к области радиолокации и может быть использовано для определения высоты полета летательного аппарата над земной, водной поверхностью, над поверхностью различных планет, а также при взлете и посадке. Достигаемый технический результат - снижение погрешности измерения высоты при изменении направления излучения, балльности, появлении брызг, перемещении поверхности слоя воды. Сущность изобретения в том, что измерение высоты полета осуществляется способом, основанным на измерении протяженности облучаемой площадки с помощью радиовысотомера или бортового радиолокатора. В связи с тем что измерение дальности до каких либо радиолокационных отражателей, расположенных в пределах диаграммы направленности бортовой антенны не осуществляется, имеет место устранение причины появления погрешностей в известных радиовысотомерах. 1 з.п. ф-лы, 5 ил.
1. Радиолокационный способ определения высоты полета летательного аппарата, включающий облучение с помощью бортовой радиолокационной станции земной или водной поверхности, прием отраженных от нее электромагнитных сигналов, отличающийся тем, что фиксируют границы протяженности облучаемой площадки в пределах диаграммы направленности антенны, эхо-сигналы принимают от фиксированных областей облучаемой площадки, расположенных на максимальном и минимальном удалении от бортовой радиолокационной станции, измеряют протяженность облучаемой площадки, когда направление диаграммы направленности совпадает с продольной осью летательного аппарата, и вычисляют высоту полета летательного аппарата в соответствии с выражением (1), когда отсутствует угол наклона диаграммы направленности антенны в вертикальной плоскости, или в соответствии с выражением (2) при наличии угла наклона диаграммы направленности антенны в вертикальной плоскости

где: Н - высота полета над земной или водной поверхностью,
L - протяженность облучаемой площадки,
θ - ширина диаграммы направленности антенны в вертикальной плоскости,
β - угол наклона диаграммы направленности антенны в вертикальной плоскости.
2. Радиолокационный способ определения высоты полета летательного аппарата по п. 1, отличающийся тем, что дополнительно облучают поверхность в нескольких направлениях через промежутки не менее 45° и вычисляют среднее значение высоты полета.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ПОВЕРХНОСТИ ЗЕМЛИ | 2008 |
|
RU2372626C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 2003 |
|
RU2234739C1 |
| СИСТЕМА КОНТРОЛЯ И ПРЕДОТВРАЩЕНИЯ НЕСАНКЦИОНИРОВАННЫХ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ МАЛОЙ АВИАЦИИ В ВОЗДУШНОМ ПРОСТРАНСТВЕ КРУПНЫХ ГОРОДОВ И КРИТИЧЕСКИ ВАЖНЫХ ОБЪЕКТОВ | 2007 |
|
RU2343530C1 |
| ЭЛЕКТРОЛИТ ДЛЯ ЭЛЕКТРОХИМИЧЕСКОГО ОСАЖДЕНИЯ ФУНКЦИОНАЛЬНЫХ ПОКРЫТИЙ НИКЕЛЬ - БОР | 1993 |
|
RU2124072C1 |
| WO 2002068991 A1, 06.09.2002 | |||
| US 5892462 A, 06.04.1999 | |||
| US 6812885 B2, 02.11.2002. | |||

