.5 6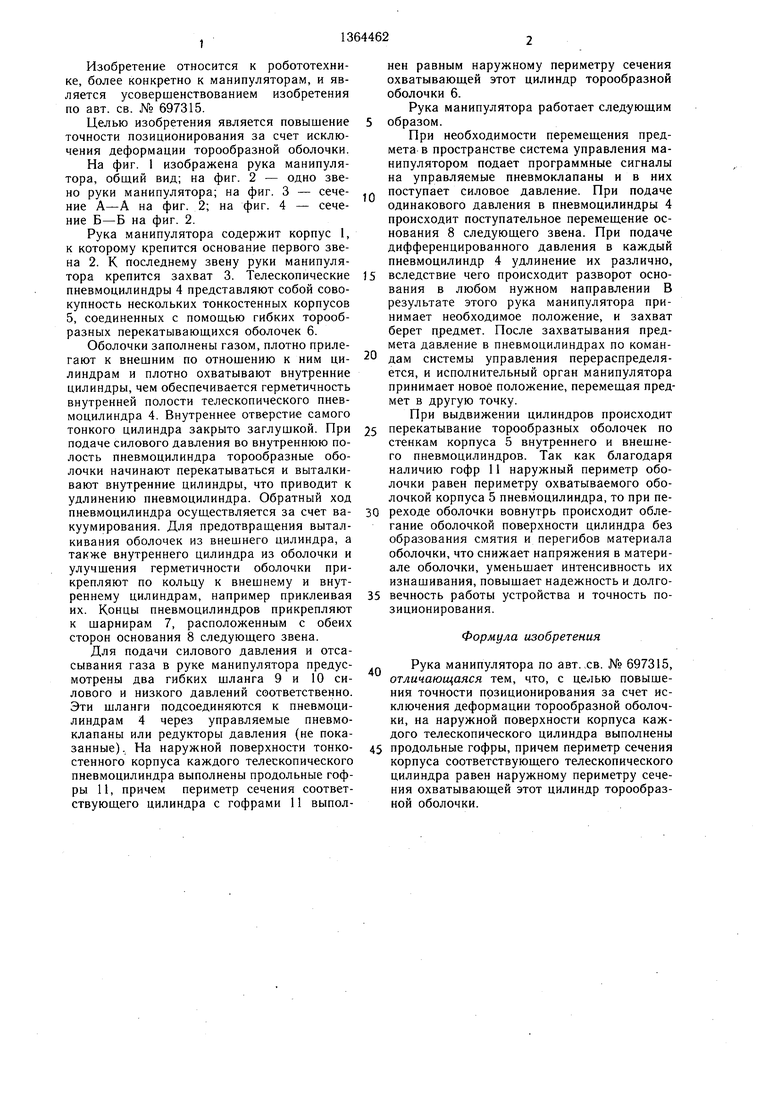
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1983 |
|
SU1121132A2 |
| Рука манипулятора | 1978 |
|
SU697315A1 |
| Рука манипулятора | 1980 |
|
SU982896A2 |
| ТЕЛЕСКОПИЧЕСКАЯ ПНЕВМОГИДРАВЛИЧЕСКАЯ МАЧТА | 1991 |
|
RU2012955C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА КАМЕРНОГО ПРИВОДА | 2014 |
|
RU2586379C1 |
| Телескопический подъемник | 1986 |
|
SU1361104A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Устройство для затягивания кабельных изделий в трубопровод | 1987 |
|
SU1472981A2 |
| Камерный привод | 2019 |
|
RU2722942C1 |
| Устройство для нанесения жидкости на внутреннюю поверхность труб | 1987 |
|
SU1509124A1 |
Изобретение относится к робототехнике, более конкретно к манипуляторам. Целью изобретения является повышение точности позиционирования за счет исключения деформации торообразной оболочки. Для этого манипулятор содержит корпус, к которому крепится основание первого звена. К последнему звену руки манипулятора крепится захват. Телескопические пневмо- цилиндры 4 представляют собой совокупность нескольких тонкостенных корпусов 5, соединенных с помощью гибких торообраз- ных перекатывающихся оболочек 6. На наружной поверхности тонкостенного корпуса 5 каждого телескопического пневмоцилиндра выполнены продольные гофры П. Периметр сечения соответствующего цилиндра с гофрами 1 I выполнен равным наружному периметру сечения охватывающей этот цилиндр торообразной оболочки 6. 4 и.л.
Q С J C7
/ 7/
4
L
со Oi ии J
OS
o
//JI
-(
Фаг. 2
Изобретение относится к робототехнике, более конкретно к манипуляторам, и является усовершенствованием изобретения по авт. св. № 697315.
Целью изобретения является повышение точности позиционирования за счет исключения деформации торообразной оболочки.
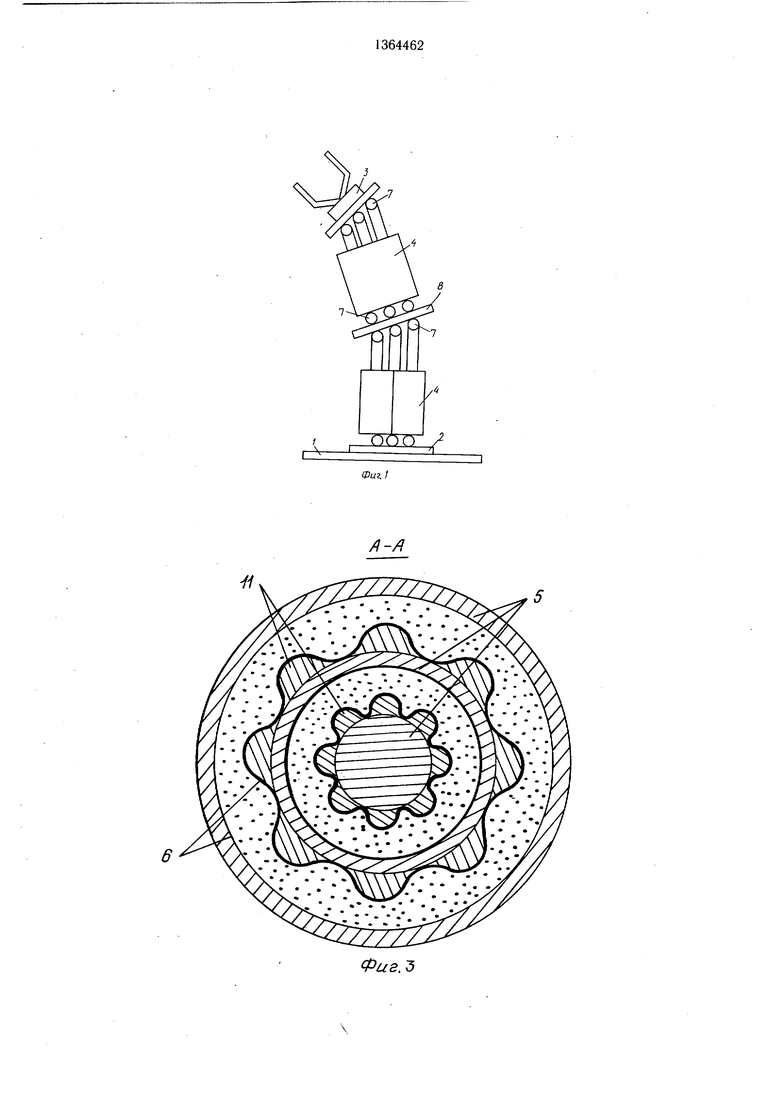
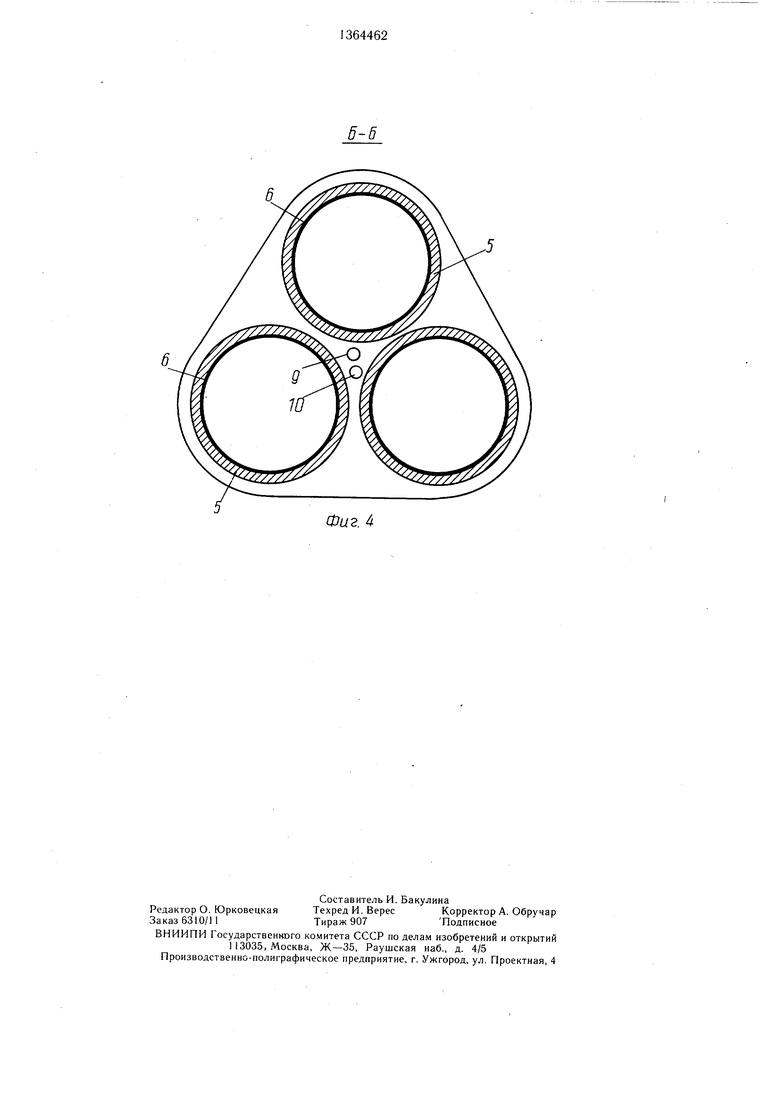
На фиг. 1 изображена рука манипулятора, общий вид; на фиг. 2 - одно звено руки манипулятора; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2.
Рука манипулятора содержит корпус 1, к которому крепится основание первого звена 2. К последнему звену руки манипулятора крепится захват 3. Телескопические пневмоцилиндры 4 представляют собой совокупность нескольких тонкостенных корпусов 5, соединенных с помош,ью гибких торооб- разных перекатывающихся оболочек 6.
Оболочки заполнены газом, плотно прилегают к внещним по отнощению к ним цилиндрам и плотно охватывают внутренние цилиндры, чем обеспечивается герметичность внутренней полости телескопического пнев- моцилиндра 4. Внутреннее отверстие самого тонкого цилиндра закрыто заглущкой. При подаче силового давления во внутреннюю полость пневмоцилиндра торообразные оболочки начинают перекатываться и выталкивают внутренние цилиндры, что приводит к удлинению пневмоцилиндра. Обратный ход пневмоцилиндра осуществляется за счет ва- куумирования. Для предотвращения выталкивания оболочек из внешнего цилиндра, а также внутреннего цилиндра из оболочки и улучшения герметичности оболочки прикрепляют по кольцу к внешнему и внутреннему цилиндрам, например приклеивая их. Концы пневмоцилиндров прикрепляют к шарнирам 7, расположенным с обеих сторон основания 8 следующего звена.
Для подачи силового давления и отсасывания газа в руке манипулятора предусмотрены два гибких шланга 9 и 10 силового и низкого давлений соответственно. Эти шланги подсоединяются к пневмоци- линдрам 4 через управляемые пневмо- клапаны или редукторы давления (не показанные) . На наружной поверхности тонкостенного корпуса каждого телескопического пневмоцилиндра выполнены продольные гофры 11, причем периметр сечения соответствующего цилиндра с гофрами 11 выполнен равным наружному периметру сечения охватывающей этот цилиндр торообразной оболочки 6.
Рука манипулятора работает следующим
образом.
При необходимости перемещения предмета в пространстве система управления манипулятором подает программные сигналы на управляемые пневмоклапаны и в них
поступает силовое давление. При подаче одинакового давления в пневмоцилиндры 4 происходит поступательное перемещение основания 8 следующего звена. При подаче дифференцированного давления в каждый пневмоцилиндр 4 удлинение их различно,
вследствие чего происходит разворот основания в любом нужном направлении В результате этого рука манипулятора принимает необходимое положение, к захват берет предмет. После захватывания предмета давление в пневмоцилиндрах по командам системы управления перераспределяется, и исполнительный орган манипулятора принимает новое положение, перемещая предмет в другую точку.
При выдвижении цилиндров происходит
перекатывание торообразных оболочек по стенкам корпуса 5 внутреннего и внешнего пневмоцилиндров. Так как благодаря наличию гофр 11 наружный периметр оболочки равен периметру охватываемого оболочкой корпуса 5 пневмоцилиндра, то при переходе оболочки вовнутрь происходит облегание оболочкой поверхности цилиндра без образования смятия и перегибов материала оболочки, что снижает напряжения в материале оболочки, уменьшает интенсивность их изнашивания, повыщает надежность и долговечность работы устройства и точность позиционирования.
Формула изобретения
40
Рука манипулятора по авт.,св. № 697315, отличающаяся тем, что, с целью повышения точности позиционирования за счет исключения деформации торообразной оболочки, на наружной поверхности корпуса каждого телескопического цилиндра выполнены 45 продольные гофры, причем периметр сечения корпуса соответствующего телескопического цилиндра равен наружному периметру сечения охватывающей этот цилиндр торообразной оболочки.
УУ
Фиг,Ъ
ФЦ2. 4
| Рука манипулятора | 1978 |
|
SU697315A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
