Изобретение относится к области авиации и может быть использовано для управления летательными аппаратами (ЛА) конвертопланного типа, в том числе, в беспилотных авиационных системах, в составе которых используются ЛА вертикального взлета и посадки.
Для летательных аппаратов конвертопланной схемы общей проблемой является необходимость обеспечения устойчивости и управляемости как на режимах вертикального взлета и посадки, так и на режиме крейсерского полета, а также на переходных режимах. Как правило, для этих режимов используются различные органы управления и различные конфигурации подъемно-маршевых агрегатов и, как следствие, различные принципы управления ЛА, в связи с чем процесс перехода от одного режима полета к другому связан с риском потери устойчивости аппарата.
Известен аналог - способ управления конвертопланом Bell V-22 Osprey (US 2020064867 A1 «Method and Apparatus for Flight Control of Tiltrotor Aircraft))), имеющим классическую самолетную аэродинамическую схему с высокорасположенным крылом и хвостовым оперением (горизонтальным и вертикальным). В качестве подъемных и маршевых движителей используются два винта большого диаметра, приводимые во вращение двигателями, установленными в мотогондолах, закрепленных шарнирно на внешних законцовках консолей крыльев и имеющих возможность изменять наклон в продольной плоскости от вертикального до горизонтального. На режимах крейсерского полета управление производится с помощью аэродинамических органов управления - элеронов, рулей высоты и направления. На висении и малых поступательных скоростях полета управление осуществляется подобно двухвинтовым вертолетам - с помощью автомата-перекоса во втулке каждого винта, изменяющего общий и циклический шаг лопастей.
Недостатком выбранного метода управления является сложная кинематическая схема управления движителями, что влечет за собой снижение управляемости и надежности ЛА в целом.
Кроме того, на переходных режимах, особенно при малых скоростях полета при наклоне мотогондол на угол 45 градусов, использование только управления вектором тяги двух винтов приводит к значительному перекрестному влиянию в каналах управления угловым положением и скоростью полета летательного аппарата, что усложняет процесс пилотирования и, как следствие, снижает безопасность выполнения полетов.
В качестве прототипа был выбран способ управления полетом летательного аппарата конвертопланного типа (The Bell Х-22А V/STOL, variable stability research airplane, Lessons learned. John L. Beilman, Flight Reasearch Departament Calspan Advanced Technology Center; Flight manual X-22A V/STOL Research aircraft, Bell Aerosystems Co.; X-22A Design Development, V.B. Paxhia and E.Y. Sing, Bell Aerosystems Co.; Bell aircraft since 1935, A.J. Pelletier). Данный способ предназначен для управления конвертопланом, имеющим четыре поворотных винтокольцевых движителя, расположенных в хвостовой части ЛА и приводимых в движение четырьмя турбовальными двигателями посредством единой трансмиссии, а также аэродинамические органы управления, установленные в потоке от винтов (элевоны) и вертикальное хвостовое оперение без руля направления. Данный способ управления включает возможность осуществления синхронного наклона всех движителей в продольной плоскости.
В качестве аэродинамических органов управления, изменяющих угловую ориентацию ЛА, используются отклоняемые аэродинамические поверхности - элевоны, расположенные на уровне выходного среза колец винтокольцевых движителей (ВКД) и позволяющие изменять направление воздушного потока от ВКД.
На малых скоростях полета продольный и поперечный моменты могут создаваться путем изменения тяги отдельных ВКД.
Управление положением центра масс ЛА по высоте относительно земной поверхности (на малых скоростях полета) и изменение скорости на крейсерском режиме реализуется путем синхронного изменения тяг всех четырех ВКД.
Изменение тяги ВКД производится посредством независимого изменения угла установки («шага») лопастей ВКД с помощью механической проводки.
Вследствие отсутствия руля направления момент рыскания на крейсерском режиме полета создается дифференциальным изменением тяг левых и правых движителей.
Недостатком данного способа управления является изменение угла установки лопастей, расположенных в поворотных ВКД, что усложняет схему управления летательным аппаратом, приводит к снижению управляемости и, как следствие, к снижению безопасности полета.
Кроме того, выбранная аэродинамическая схема, при которой роль крыльев играют кольцевые обечайки винтов, обладает низким аэродинамическим качеством и не обеспечивает необходимую управляемость траекторным движением на крейсерском режиме полета.
Поскольку данный летательный аппарат разрабатывался в качестве демонстратора новой аэродинамической схемы, вопросы оптимального формирования управляющих сигналов и обеспечения характеристик устойчивости и управляемости разработчиками детально не исследовались.
Технический результат заключается в повышении безопасности полета ЛА за счет повышения надежности и обеспечения устойчивости и управляемости ЛА конвертопланного типа на всех режимах полета, включая переходные.
Указанный результат достигается тем, что в способе управления конвертопланом вертикального взлета и посадки, оборудованным четырьмя поворотными винтокольцевыми движителями вентиляторного типа и аэродинамическими органами управления:
- с помощью винтокольцевых движителей создают подъемную силу на режимах вертикального взлета и посадки и пропульсивную силу на режимах крейсерского полета, причем направление действия суммарной тяги винтокольцевых движителей изменяют путем синхронного наклона с помощью приводов всех четырех винтокольцевых движителей в продольной плоскости в зависимости от скорости полета,
- величину тяги каждого отдельного винтокольцевого движителя изменяют для управления суммарной тягой и создания управляющих моментов,
- с помощью аэродинамических органов управления изменяют величину подъемной силы и аэродинамических моментов на режиме крейсерского полета и переходных режимах полета
- при этом конвертоплан оборудован системой бортовых измерений с датчиками пространственного положения и углового перемещения, а также системой управления;
- подъемную силу создают также при помощи крыльев;
- управление производят при помощи аэродинамических органов управления: элевонов и флаперонов, расположенных на задних консолях крыльев и руля направления;
- для изменения величины тяги каждого отдельного винтокольцевого движителя изменяют частоту вращения винта винтокольцевого движителя;
- каждый винтокольцевой движитель оснащают собственным электродвигателем, с помощью которого изменяют частоту вращения винта винтокольцевого движителя;
- при этом четыре винтокольцевых движителя и указанные аэродинамические органы управления отклоняют с помощью собственных независимых электромеханических приводов;
- с помощью ручного или автоматического управления формируют заданное пространственное положение или перемещение конвертоплана, определяющих траекторное движение конвертоплана;
- из системы бортовых измерений получают сигнал о текущем пространственном положении конвертоплана;
- посредством сравнения заданных и текущих параметров траекторного движения конвертоплана в бортовом контроллере рассчитывают потребную величину и направление действия суммарной тяги всех винтокольцевых движителей и соответствующую потребную угловую ориентацию конвертоплана;
- посредством сравнения потребной и текущей угловой ориентации, рассчитывают потребные управляющие моменты тангажа, крена и рыскания;
- на основании рассчитанных потребных значений суммарной тяги и управляющих моментов вычисляют потребные отклонения всех органов управления: тягу каждого из четырех винтокольцевых движителей, углы отклонения аэродинамических органов управления, угол синхронного наклона всех четырех винтокольцевых движителей и разницу углов дифференциального наклона винтокольцевых движителей;
- указанные потребные отклонения всех органов управления в виде управляющих команд одновременно подают на соответствующие органы управления;
- в зависимости от текущего положения конвертоплана, для создания момента тангажа и управления конвертопланом в продольной плоскости дифференциально изменяют тяги передних и задних винтокольцевых движителей, а также соразмерно симметрично отклоняют элевоны и флапероны на передних и задних консолях крыльев на крейсерском и переходном режимах;
- при этом для создания момента рыскания и путевого управления конвертопланом дифференциально изменяют тяги левой и правой пар винтокольцевых движителей и отклоняют руль направления на крейсерском режиме, а на малых скоростях дифференциально отклоняют пары левых и правых винтокольцевых движителей в продольной плоскости;
- при этом для создания момента крена и управления конвертопланом в поперечной плоскости дифференциально изменяют тягу пар левых и правых движителей на малых скоростях и соразмерно ассиметрично отклоняют элевоны и флапероны левых и правых консолей крыльев на крейсерском и переходном режимах;
- при этом потребные значения управляющих команд рассчитывают с помощью единого для всех режимов полета алгоритма, обеспечивающего выбор оптимальных значений управляющих команд, в зависимости от скорости полета и наклона движителей, а в бортовом контроллере производят анализ отказов и состояний органов управления, на основании чего корректируют оптимальные значения управляющих команд.
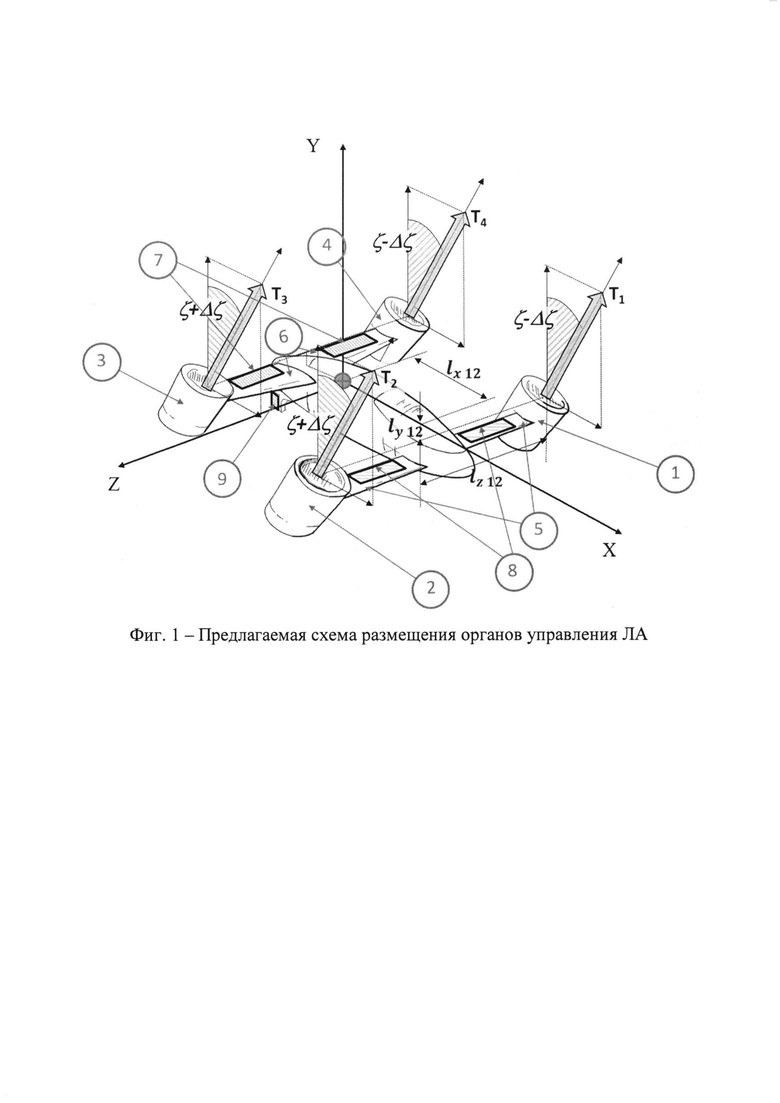
На фигуре 1 представлена предлагаемая схема размещения органов управления ЛА конвертопланного типа, где:
1-4 - ВКД;
5 - переднее крыло;
6 - заднее крыло;
7 - элевоны;
8 - флапероны;
9 - руль направления;
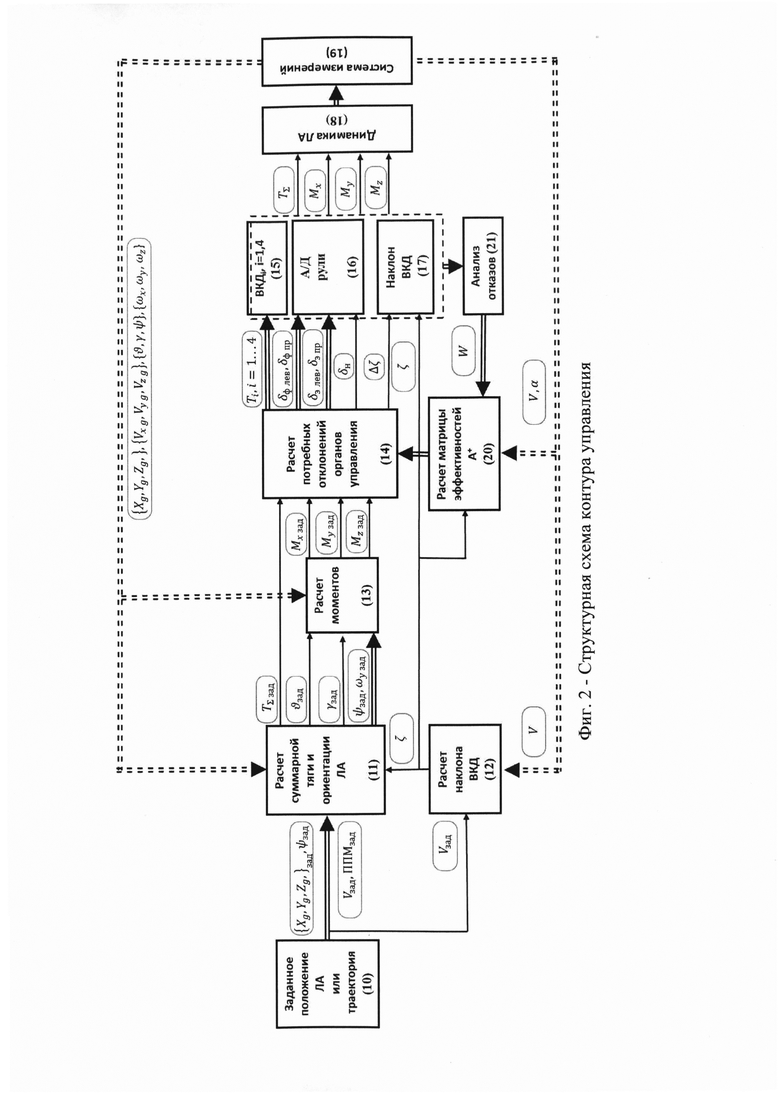
На фигуре 2 изображена структурная схема контура управления, где:
10 - Заданное положение ЛА или траектория;
11 - Расчет суммарной тяги и ориентации ЛА;
12 - Расчет наклона ВКД;
13 - Расчет моментов;
14 - Расчет потребных отклонений органов управления;
15 - Изменение тяг ВКД;
16 - Отклонение аэродинамических органов управления;
17 - Угол наклона ВКД;
18 - Динамика ЛА;
19 - Система бортовых измерений;
20 - Расчет матрицы эффективностей;
21 - Анализ отказов.
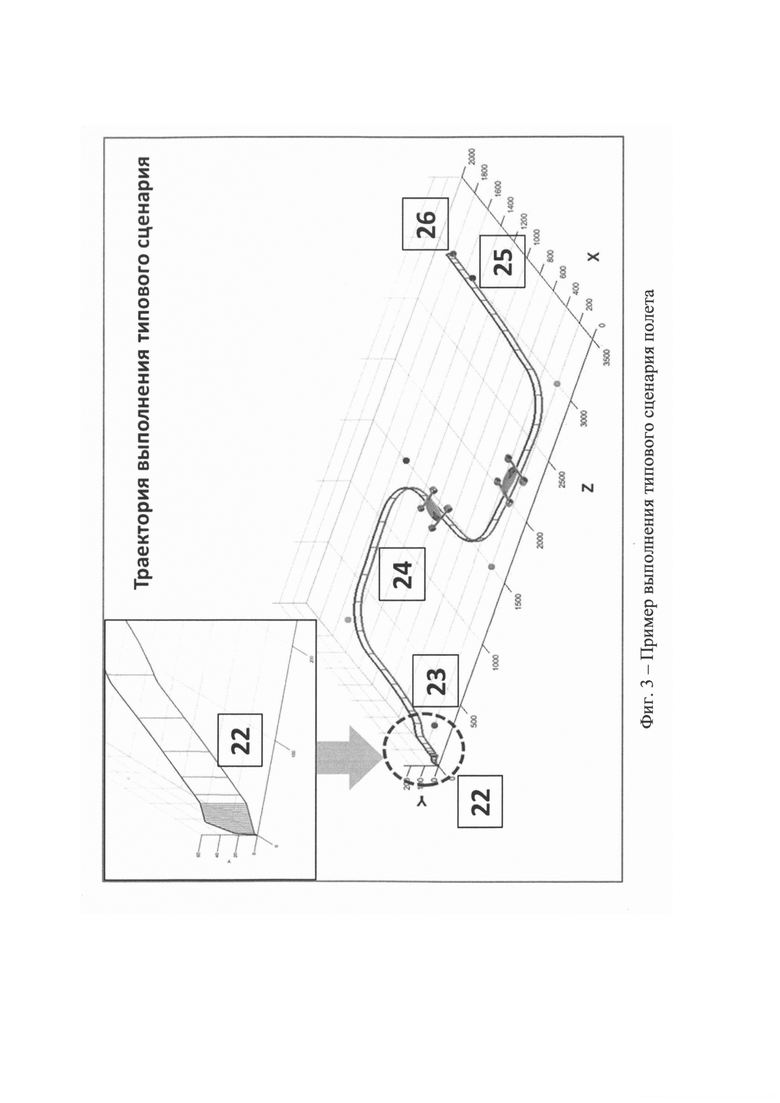
На фигуре 3 представлен пример выполнения типового сценария полета, где
22 - «Вертолетный режим». Вертикальный взлет, висение в режиме стабилизации заданной высоты и положения относительно заданной точки, перемещение в заданное положение с произвольной ориентацией БЛА по углу курса;
23 - Переходный режим. Переключение в режим отслеживания заданной траектории, изменение высоты по заданному закону, разгон до заданной скорости;
24 - «Самолетный режим». Полет по траектории, заданной с помощью ППМ с заданной скоростью, стабилизация высоты полета;
25 - Переходный режим. Торможение, переключение в режим стабилизации висения вблизи заданной точки;
26 - «Вертолетный режим». Вертикальная посадка.
Предлагаемый способ относится к способам управления конвертопланом вертикального взлета и посадки (см. Фиг. 1) аэродинамической схемы тандем с передним низкорасположенным крылом (5) и задним высоко расположенным крылом (6). Аппарат имеет четыре приводимых в движение независимыми электродвигателями поворотных ВКД вентиляторного типа (1-4), расположенных на концах консолей крыльев и имеющих возможность осуществлять с помощью независимых электромеханических приводов синхронный наклон средних положений осей всех четырех движителей в продольной плоскости на угол £ в зависимости от скорости полета и темпа разгона. Кроме того, имеется возможность с помощью этих же электромеханических приводов выполнять дифференциальное (асимметричное) отклонение осей левых (ВКД 1 и 4) и правых (ВКД 2 и 3) пар движителей на угол А% относительно среднего положения, соответствующего выбранной скорости полета и темпу разгона. Аппарат обладает отклоняемыми с помощью электромеханических приводов аэродинамическими органами управления, в качестве которых используются элевоны δэ лев, δэ пр (7), расположенные на задней кромке консолей заднего крыла (6), флапероны δф лев, δф пр (8), расположенные на задней кромке консолей переднего крыла (5), и руль направления δн (9), расположенный на задней кромке вертикального оперения под фюзеляжем.
Предлагаемый способ реализуется следующим образом: из блока заданных параметров ЛА (10) (см. Фиг. 2) в блоки расчета суммарной тяги, ориентации ЛА (11) и расчета наклона ВКД (12) поступают заданные значения координат ЛА {Xg,Yg,Zg}зад, угла рыскания ψзад (на висении и малых скоростях) или скорости полета Vзад и координаты промежуточных пунктов маршрута {Xg,Yg,Zg}ППМ на режиме крейсерского полета (см. фиг. 2). На основании сравнения заданных и текущих значений координат ЛА, скорости и направления полета, поступающих из системы бортовых измерений (19), в блоке (11) осуществляется управление траекторным движением посредством формирования заданных значений сил, действующих на ЛА, с помощью единого набора алгоритмов для всех режимов полета, с учетом текущей конфигурации ЛА. На основании сформированных значений сил в блоке (11) путем решения обратной задачи осуществляется расчет потребной суммарной тяги всех ВКД TΣ зад и заданных параметров углового положения ЛА ϑзад,γзад,ψзад, определяющих ориентацию вектора суммарной тяги и аэродинамических сил. При выполнении координированных виражей рассчитывается также заданная угловая скорость ωу зад. На основании сравнения заданных {ϑзад,γзад,ψзад,ωy зад} и текущих значений углов ориентации ЛА {ϑ,γ,ψ} и угловых скоростей {ωх,ωy,ωz}, поступающих из системы бортовых измерений (19), в блоке расчета моментов (13) осуществляется управление угловым положением ЛА по единым для всех режимов алгоритмам путем формирования заданных значений управляющих моментов {Мх зад,Му зад,Mz зад} относительно трех осей связанной системы координат.
Формирование потребных отклонений органов управления в блоке (14), обеспечивающих заданные значения суммарной тяги движителей (ТΣ зад) и управляющих моментов (Мх зад,Му зад,Mz зад), осуществляется в блоке (20) посредством использования алгоритма расчета на основе матрицы расчетных и экспериментально определенных эффективностей ЛА, зависящей от режима полета, определяемого с учетом информации о скорости полета V, поступающей из системы бортовых измерений (19), и конфигурации ЛА, определяемой текущим значением угла установки ВКД ζ, поступающим из блока расчета наклона ВКД (12). Избыточность набора органов управления по сравнению с количеством каналов управления ЛА позволяет произвести оптимальный выбор значений компонентов вектора управляющих команд за счет использования псевдообращения матрицы эффективностей (20), при этом при расчете псевдообратной матрицы А+ учитывается возможность исключения из расчета отдельных органов управления при получении информации об их отказе. Для этого в расчет А+ включается диагональная весовая матрица W, единицы и нули на диагонали которой соответствуют работающим и исключенным органам управления. Сформированные в блоке (14) управляющие команды поступают в блок управления тягой ВКД (15) (Ti, i=1…4), блок электромеханических приводов аэродинамических органов управления (16) (элевонов δэ лев, δэ пр, флаперонов δф лев, δф пр, руля направления δн) и блок управления дифференциальным наклоном левых и правых пар ВКД (17) (Δζ) и распределяются по органам управления в пределах располагаемых диапазонов отклонений с характерными весами в зависимости от конфигурации ЛА. В результате силы и моменты, действующие на ЛА с учетом текущих значений управляющих параметров, изменяют ориентацию и положение ЛА в пространстве в соответствии с динамическими характеристиками ЛА, представленными на схеме в виде блока динамики ЛА (18).
Система бортовых измерений, представленная на фиг. 2 в виде блока (19), включает в себя следующие элементы:
- Высотомер;
- Датчик воздушной скорости;
- Маяк GPS;
- Инерциальная навигационная система (ИНС).
В предлагаемом способе независимое управление тягой (Ti, i=1…4) каждого ВКД осуществляется путем изменения частоты вращения электродвигателей, приводящих их в движение.
Продольный момент создается путем дифференциального изменения тяг пар передних (T1 и Т2) и задних (T3 и Т4) ВКД, а также соразмерным симметричным отклонением флаперонов и элевонов на крейсерском режиме полета.
Создание поперечного момента ЛА на висении и малых скоростях полета осуществляется путем соразмерного дифференциального изменения частоты вращения пар двигателей левого и правого бортов, а на крейсерском режиме полета - путем соразмерного дифференциального отклонения элевонов и флаперонов и/или дифференциальным наклоном осей левых и правых пар движителей относительно среднего положения.
Создание момента рыскания ЛА на висении и малых скоростях полета осуществляется путем одновременного изменения моментов, создаваемых тягами левой и правой пар ВКД за счет дифференциального наклона осей левых и правых пар движителей относительно их среднего положения, а на крейсерском режиме полета - путем соразмерного отклонения руля направления и/или путем одновременного изменения моментов, создаваемых тягами левой и правой пар ВКД за счет дифференциального изменения тяг левых и правых пар движителей.
Управление угловым положением ЛА на любом режиме полета реализуется посредством создания необходимых моментов.
Управление высотой на висении и малых скоростях полета осуществляется путем синхронного изменения тяги всех четырех движителей, а на крейсерском режиме полета - путем управления углом атаки (тангажом) ЛА посредством создания продольного момента.
Управление скоростью полета в зависимости от скорости полета и наклона ВКД реализуется путем одновременного изменения тяг всех двигателей и/или угла тангажа ЛА, при этом управление углом тангажа производится за счет создания управляющего продольного момента.
В качестве примера осуществления предлагаемого способа управления ЛА конвертопланного типа выбран сценарий применения, при котором задана траектория полета для вертолетной конфигурации ЛА, разгон и полет по заданной траектории в самолетной конфигурации, затем торможение и вертикальная посадка в заданной точке в вертолетной конфигурации (Фиг. 3).
Летательный аппарат взлетает над поверхностью земли в вертолетной конфигурации (22), соразмерно увеличивая тягу всех ВКД, оси всех четырех движителей при этом направлены вертикально вверх. Посредством отклонения пары ВКД левого борта вперед и пары ВКД правого борта назад на один и тот же угол относительно нормальной оси ЛА, аппарат поворачивается по углу рыскания до заданного значения за счет создания момента рыскания. Для создания продольного момента и, соответственно, изменения угла тангажа (на пикирование), увеличивается частота вращения винтов двух задних ВКД и уменьшается частота вращения винтов двух передних ВКД, таким образом, обеспечивается создание горизонтальной проекции тяги двигателей в продольной плоскости при сохранении вертикальной составляющей суммарной тяги, равной весу ЛА, за счет чего аппарат летит вперед до выбранной точки маршрута с заданной скоростью. Для изменения направления полета аппарат может выполнить поворот по углу рыскания посредством дифференциального изменения угла наклона левых и правых пар ВКД и совершить полет до заданной точки с постоянной скоростью, создаваемой отклонением по углу тангажа. Другим способом изменения направления полета при произвольно заданной ориентации по углу рысканья является управление проекцией силы тяги винтов в поперечном направлении за счет изменения угла крена ЛА путем изменения соотношения тяг левой и правой пары ВКД. На следующем этапе полета реализуется разгон аппарата путем уменьшения угла тангажа (на пикирование) и увеличения суммарной тяги ВКД (23). В процессе разгона средний угол наклона ВКД изменяется в зависимости от скорости от 90° до 0°, таким образом аппарат постепенно преобразуется в самолетную конфигурацию (24). В переходной конфигурации ЛА управляется с помощью одновременного соразмерного использования всех органов управления, т.е., ВКД и аэродинамических органов управления. Достигая промежуточного пункта маршрута, ЛА осуществляет изменение направления полета (разворот), соразмерно отклоняя элевон и флаперон левого борта в одну сторону, а элевон и флаперон правого борта в противоположную сторону, таким образом изменяя угол крена. Для управления углом скольжения при полете в самолетной конфигурации на высокой скорости отклоняется руль направления, кроме того, дополнительно может использоваться асимметричное изменение тяг левой и правой пар ВКД.
По мере приближения к заданной точке посадки, скорость ЛА уменьшается путем управления углом тангажа ЛА, а, соответственно, изменяется средний угол наклона ВКД от 0° до 90°, таким образом осуществляется переход в вертолетную конфигурацию (25). Достигнув заданной точки посадки, аппарат выполняет зависание над ней на заданной высоте с нулевой скоростью полета, тяга двигателей компенсирует вес ЛА, стабилизация перемещения в горизонтальной плоскости осуществляется путем управления креном и тангажом ЛА. Угол рысканья при этом выбирается в соответствии с конфигурацией посадочной площадки или из условия минимизации влияния ветра путем разворота против ветра и отклонения всех ВКД на угол, обеспечивающий висение с углом тангажа, близким к нулю.
Далее совершается посадка на поверхность земли путем уменьшения тяг всех четырех ВКД (26).
Компьютерное моделирование полета по заданному сценарию с помощью математической модели, реализующей схему, изображенную на Фиг. 2, подтвердило возможность обеспечения устойчивости и управляемости на всех режимах, включая переходный.
Полунатурная отработка способа управления с использованием реальных электромеханических приводов показала его эффективность.
Таким образом, использование предлагаемого способа позволяет обеспечить выполнение основных режимов полета для ЛА конвертопланного типа, в том числе переходные режимы, а также обеспечить высокие характеристики устойчивости и управляемости. За счет избыточности органов управления по сравнению с количеством каналов управления ЛА предлагаемый способ позволяет обеспечить сохранение управляемости при отказе одного из органов управления за счет перераспределения управляющих команд на оставшиеся органы управления в пределах располагаемых диапазонов отклонений. Заложенная в способ управления отказоустойчивость позволяет повысить надежность системы управления и безопасность полета. Применение рулевых приводов и ВКД с электрическим энергопитанием позволяет повысить энергетическую эффективность и экологические показатели, а также упростить сервисное обслуживание за счет исключения гидравлических систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМПЛЕКСНОГО ПОВЫШЕНИЯ АЭРОДИНАМИЧЕСКИХ И ТРАНСПОРТНЫХ ХАРАКТЕРИСТИК, ЭКРАНОПЛАН ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА (ВАРИАНТЫ) И СПОСОБ ВЫПОЛНЕНИЯ ПОЛЕТА | 2010 |
|
RU2539443C2 |
| КОНВЕРТИРУЕМЫЙ ДОЗВУКОВОЙ САМОЛЕТ | 2024 |
|
RU2839782C1 |
| КОНВЕРТОПЛАН С РЕАКТИВНЫМ ПРИВОДОМ РОТОРОВ, УПРАВЛЯЕМЫЙ РОТОРАМИ ПОСРЕДСТВОМ АВТОМАТОВ ПЕРЕКОСА ЧЕРЕЗ РЫЧАГИ УПРАВЛЕНИЯ, НЕ ТРЕБУЮЩИЙ ДОПОЛНИТЕЛЬНЫХ СРЕДСТВ УПРАВЛЕНИЯ | 2013 |
|
RU2570241C2 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456208C1 |
| СПОСОБ УПРАВЛЕНИЯ ТАНГАЖОМ КОНВЕРТОПЛАНА | 2022 |
|
RU2803674C2 |
| СПОСОБ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ И ЗАВИСАНИЯ САМОЛЕТА В ВОЗДУХЕ | 2016 |
|
RU2656934C2 |
| Способ управления тангажом конвертоплана | 2022 |
|
RU2820358C1 |
| Конвертоплан | 2018 |
|
RU2682756C1 |
| КОНВЕРТОПЛАН | 2016 |
|
RU2635431C1 |
| КОНВЕРТОПЛАН | 2011 |
|
RU2456209C1 |
Изобретение относится к способу управления конвертопланом вертикального взлета и посадки. Для управления конвертопланом с помощью винтокольцевых движителей создают подъемную силу на режимах вертикального взлета и посадки и пропульсивную силу на режимах крейсерского полета определенным образом, изменяют величину тяги каждого винтокольцевого движителя для управления суммарной тягой и создания управляющих моментов, изменяют величину подъемной силы и аэродинамических моментов на режиме крейсерского полета и переходных режимах полета с помощью аэродинамических органов управления в зависимости от требуемой траектории полета. Обеспечивается повышение безопасности полета за счет повышения надежности и обеспечения устойчивости и управляемости ЛА конвертопланного типа на всех режимах полета, включая переходные. 3 ил.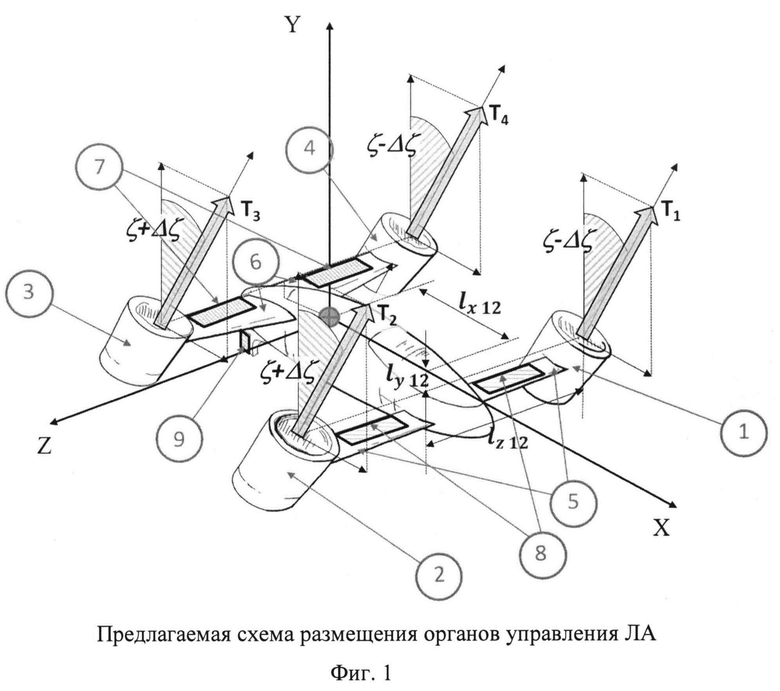
Способ управления конвертопланом вертикального взлета и посадки, оборудованным четырьмя поворотными винтокольцевыми движителями вентиляторного типа и аэродинамическими органами управления, при котором:
- с помощью винтокольцевых движителей создают подъемную силу на режимах вертикального взлета и посадки и пропульсивную силу на режимах крейсерского полета, причем направление действия суммарной тяги винтокольцевых движителей изменяют путем синхронного наклона с помощью приводов всех четырех винтокольцевых движителей в продольной плоскости в зависимости от скорости полета,
- величину тяги каждого отдельного винтокольцевого движителя изменяют для управления суммарной тягой и создания управляющих моментов,
- с помощью аэродинамических органов управления изменяют величину подъемной силы и аэродинамических моментов на режиме крейсерского полета и переходных режимах полета
- при этом конвертоплан оборудован системой бортовых измерений с датчиками пространственного положения и углового перемещения, а также системой управления;
отличающийся тем, что:
- подъемную силу создают также при помощи крыльев;
- управление производят при помощи аэродинамических органов управления: элевонов и флаперонов, расположенных на задних консолях крыльев и руля направления;
- для изменения величины тяги каждого отдельного винтокольцевого движителя изменяют частоту вращения винта винтокольцевого движителя;
- каждый винтокольцевой движитель оснащают собственным электродвигателем, с помощью которого изменяют частоту вращения винта винтокольцевого движителя;
- при этом четыре винтокольцевых движителя и указанные аэродинамические органы управления отклоняют с помощью собственных независимых электромеханических приводов;
- с помощью ручного или автоматического управления формируют заданное пространственное положение или перемещение конвертоплана, определяющее траекторное движение конвертоплана;
- из системы бортовых измерений получают сигнал о текущем пространственном положении конвертоплана;
- посредством сравнения заданных и текущих параметров траекторного движения конвертоплана в бортовом контроллере рассчитывают потребную величину и направление действия суммарной тяги всех винтокольцевых движителей и соответствующую потребную угловую ориентацию конвертоплана;
- посредством сравнения потребной и текущей угловой ориентации рассчитывают потребные управляющие моменты тангажа, крена и рыскания;
- на основании рассчитанных потребных значений суммарной тяги и управляющих моментов вычисляют потребные отклонения всех органов управления: тягу каждого из четырех винтокольцевых движителей, углы отклонения аэродинамических органов управления, угол синхронного наклона всех четырех винтокольцевых движителей и разницу углов дифференциального наклона винтокольцевых движителей;
- указанные потребные отклонения всех органов управления в виде управляющих команд одновременно подают на соответствующие органы управления;
- в зависимости от текущего положения конвертоплана для создания момента тангажа и управления конвертопланом в продольной плоскости дифференциально изменяют тяги передних и задних винтокольцевых движителей, а также соразмерно симметрично отклоняют элевоны и флапероны на передних и задних консолях крыльев на крейсерском и переходном режимах;
- при этом для создания момента рыскания и путевого управления конвертопланом дифференциально изменяют тяги левой и правой пар винтокольцевых движителей и отклоняют руль направления на крейсерском режиме, а на малых скоростях дифференциально отклоняют пары левых и правых винтокольцевых движителей в продольной плоскости;
- при этом для создания момента крена и управления конвертопланом в поперечной плоскости дифференциально изменяют тягу пар левых и правых движителей на малых скоростях и соразмерно асимметрично отклоняют элевоны и флапероны левых и правых консолей крыльев на крейсерском и переходном режимах;
- при этом потребные значения управляющих команд рассчитывают с помощью единого для всех режимов полета алгоритма, обеспечивающего выбор оптимальных значений управляющих команд, в зависимости от скорости полета и наклона движителей, а в бортовом контроллере производят анализ отказов и состояний органов управления, на основании чего корректируют оптимальные значения управляющих команд.
| Аэромеханический способ управления конфигурацией и режимом полета конвертируемого летательного аппарата (конвертоплана) | 2017 |
|
RU2700323C2 |
| Стенд для испытания автомобильных замков. | 1959 |
|
SU128182A1 |
| WO 2016181044 A1, 17.11.2016 | |||
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ И ОПТИМИЗИРОВАННЫМ ПОДЪЕМНЫМ НЕСУЩИМ ВИНТОМ | 2008 |
|
RU2445236C2 |
| US 20060186261 A1, 24.08.2006. | |||

