Изобретение относится к области медицины, а именно к системе нейрохирургической навигации, обеспечивающей визуализацию в режиме реального времени хирургической мишени, точную пространственную ориентацию хирургических инструментов, а также к микрохирургическим манипуляциям в области хирургической мишени.
Известно активное позиционирующее устройство хирургического инструмента для применения на механической руке, выполненное в виде телескопического манипулятора, используемого в микрохирургии, RU №2651886 С2, А61В 34/00, А61В 34/30, А61В 34/35, 24.04.2018.
Известно удерживающее и позиционирующее устройство инструмента для микрохирургии, используемое в хирургической роботизированной системе, RU №2644281 С2, А61В 34/00, А61В 34/30, А61В 34/35, 08.02.2018.
Известен манипулятор для субмикронных перемещений, используемый в микрохирургии, содержащий механизмы, обеспечивающие контролируемое перемещение объектов с субмикронной точностью, RU №2679260 C1, А61В 34/00, B25J 7/00, 06.02.2019.
Известен механический микроманипулятор для позиционирования инструментария, обеспечивающего точную пространственную его ориентацию и манипуляцию в области использования, RU №2688487 C1, А61В 34/00, 21.05.2019.
Известен механизм тонкой регулировки, используемый в микроманипуляторах и обеспечивающий точные перемещения во всем диапазоне грубого перемещения, RU №2224152 С2, F16H 3/20, 20.02.2004.
Известен привод микроманиггулятора, предназначенный для перемещения микроинструмента с высокоточным позиционированием в различных устройствах: в медико-биологических приборах, в электромеханических системах, RU №118244 U1, B25J 7/00, 20.07.2012; RU №96055 U1, B25J 7/00, 20.07.2010; RU №2266811 C1, B25J 7/00, 27.12.2005; RU №2175601 С12, B25J 7/00, 10.11.2001; RU №2149752 C1, B25J 7/00, 27.05.2000.
Известные позиционирующие устройства хирургического инструмента, микроманипуляторы, а также устройства передачи и регулирования движения для них, не имеют технических решений, совпадающих с техническими признаками предлагаемого изобретения.
Известно устройство для хирургической навигации, включающее устройство микроманипулятора для проведения микроманипуляций и устройство пространственной ориентации инструмента для хирургической навигации, содержащее фиксатор, закрепленный на операционном столе и выполненный с возможностью вращения в одной плоскости, стойку вертикального перемещения, имеющую возможность возвратно-поступательного перемещения в фиксаторе, рычаги горизонтального перемещения, по меньшей мере, основной, промежуточный, шарнирный, соединенные с возможностью смещения в параллельных горизонтальных плоскостях и снабженные звеньями соединительными, RU №35969 U1, А61 В19/00, 20.02.2004.
Данное техническое решение принято в качестве ближайшего аналога настоящего изобретения.
Состав устройства ближайшего аналога не отвечает требованиям габаритной рациональности.
Стойка вертикального перемещения ближайшего аналога выполнена вертикальной и имеет внешнюю форму, которая не обеспечивает возможность ее более близкого перемещения к телу пациента, а также к столу операционному, что усложняет работу хирурга.
Конструкция ближайшего аналога не обеспечивает необходимую точность ориентации хирургического инструмента и хирургических манипуляций, поскольку после фиксации его подвижных звеньев возникает смещение кончика инструмента на 2-3 мм от расчетной точки-цели. Для повышения точности требуется проведение повторных, иногда многократных, перемещений в подвижных звеньях ближайшего аналога. Это увеличивает время операции и снижает точность хирургической навигации и манипуляций.
В основу настоящего изобретения положено решение задачи, позволяющей упростить и унифицировать состав системы хирургической навигации, повысить точность хирургической навигации и микроманипуляций, повысить эксплуатационную надежность микроманипулятора, упростить работу хирурга при использовании системы и сократить длительность операции.
Технический результат настоящего изобретения заключается в упрощении устройства пространственной ориентации инструмента для хирургической навигации при выполнении его миниатюрным и мобильным, в выполнении рычагов и звеньев для соединения их унифицированными, соответственно, в выполнении конструкции микроманипулятора с возможностью быстро компенсировать неизбежно возникающие отклонения и неточности при навигации и микроманипуляциях, в эксплуатационной надежности микроманипулятора, в выполнении стойки вертикального перемещения составной жесткой.
Согласно изобретению эта задача решается за счет того, что система хирургической навигации и микроманипуляций включает устройство микроманипулятора для проведения микроманипуляций и устройство пространственной ориентации инструмента для хирургической навигации.
Устройство пространственной ориентации инструмента для хирургической навигации содержит фиксатор, стойку вертикального перемещения, рычаги горизонтального перемещения.
Фиксатор закреплен на операционном столе и выполнен с возможностью вращения в одной плоскости.
Стойка вертикального перемещения имеет возможность возвратно-поступательного перемещения в фиксаторе.
Рычаги горизонтального перемещения, по меньшей мере, основной, промежуточный, шарнирный соединены с возможностью смещения в параллельных горизонтальных плоскостях и снабжены звеньями соединительными.
Стойка вертикального перемещения имеет составную жесткую конструкцию и состоит из основной изогнутой составной части и дополнительной вертикальной составной части с кольцом-ограничителем вертикального перемещения.
Дополнительная вертикальная составная часть закреплена посредством звена соединительного штыревого с рычагом основным горизонтального перемещения.
Кольцо-ограничитель имеет возможность выбора необходимой высоты расположения рычага основного вдоль дополнительной вертикальной составной стойки.
При этом стойка имеет дополнительно возможность вращательного перемещения в фиксаторе.
Рычаги основной, промежуточный, шарнирный закреплены между собой звеньями соединительными штыревыми.
Рычаг шарнирный посредством звена соединительного шарнирно-шарового жестко соединен с микроманипулятором.
Микроманипулятор содержит суппорт с рукояткой и блок передачи движения.
Блок передачи движения включает рычаг передачи движения с рукояткой и рычаг установочный с рукояткой.
Каждый из рычагов имеет крепежные элементы в виде винтов и гаек-шарниров, соответственно.
Рукоятка рычага передачи движения закреплена гайкой-шарниром на этом рычаге и винтом на суппорте.
Рукоятка рычага установочного закреплена гайкой-шарниром на этом рычаге и винтом на рычаге передачи движения.
Заявителем не выявлены источники, содержащие информацию о технических решениях, идентичных настоящему изобретению, что позволяет сделать вывод о его соответствии критерию «новизна».
За счет реализации отличительных признаков изобретения (в совокупности с признаками, указанными в ограничительной части формулы) достигаются важные новые свойства объекта.
Выполнение стойки вертикального перемещения составной жесткой конструкции, состоящей из основной изогнутой составной части и дополнительной вертикальной составной части с кольцом-ограничителем вертикального перемещения, что позволяет упростить работу хирурга при использовании системы.
Закрепление рычагов основного, промежуточного, шарнирного между собой звеньями соединительными штыревыми позволяет упростить и унифицировать состав системы хирургической навигации, а также повысить ее надежность.
Соединение жесткое рычага шарнирного посредством звена соединительного шарнирно-шарового с микроманипулятором позволяет повысить точность микро-манипуляций, сократить время операции и снизить риск операционных осложнений, которые могут возникнуть, при неконтролируемых смещениях в отдельных звеньях системы.
Выполнение микроманипулятора с блоком передачи движения, включающим рычаг передачи движения и рычаг установочный, которые снабжены рукоятками и крепежными элементами в виде винтов и гаек-шарниров, соответственно, позволяет повысить его эксплуатационную надежность.
Заявителю не известны какие-либо публикации, которые содержали бы сведения о влиянии отличительных признаков изобретения на достигаемый технический результат. В связи с этим, по мнению заявителя, можно сделать вывод о соответствии заявляемого технического решения критерию «изобретательский уровень».
Сущность изобретения поясняется чертежами:
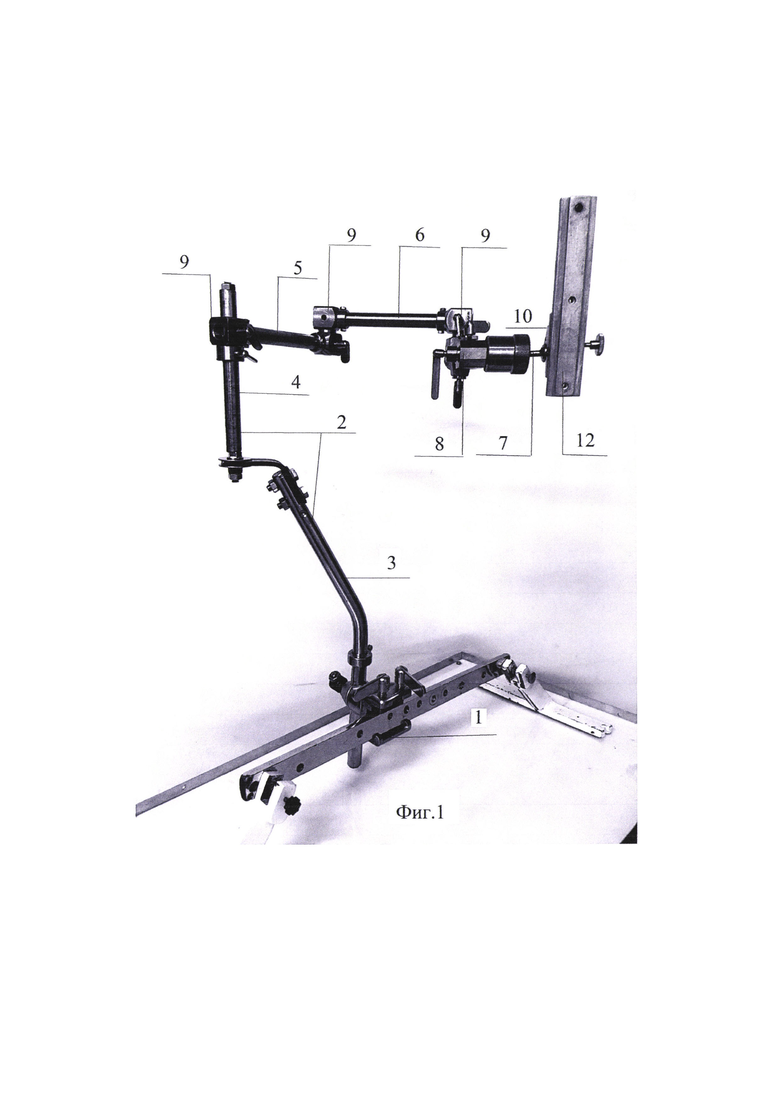
На фиг. 1 - Система хирургической навигации и микроманипуляций, общий вид.
На фиг. 2 - Система хирургической навигации и микроманипуляций, микроманипулятор, вид спереди.
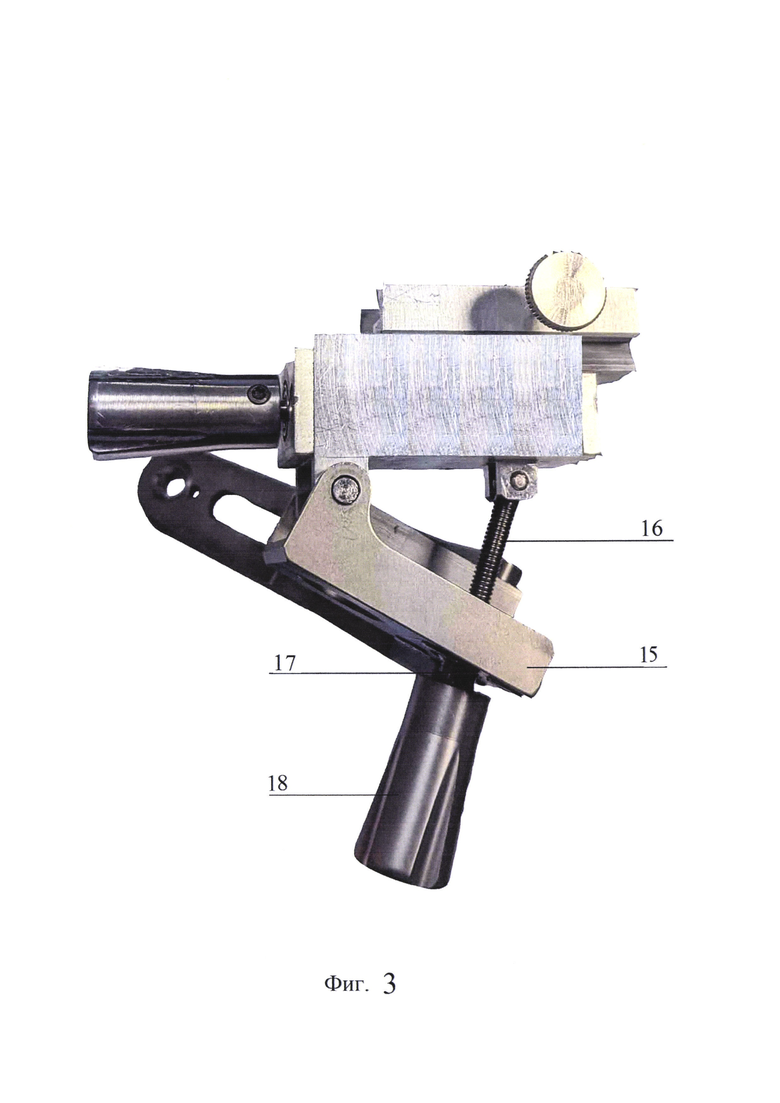
На фиг. 3 - Система хирургической навигации и микроманипуляций, микроманипулятор, вид справа.
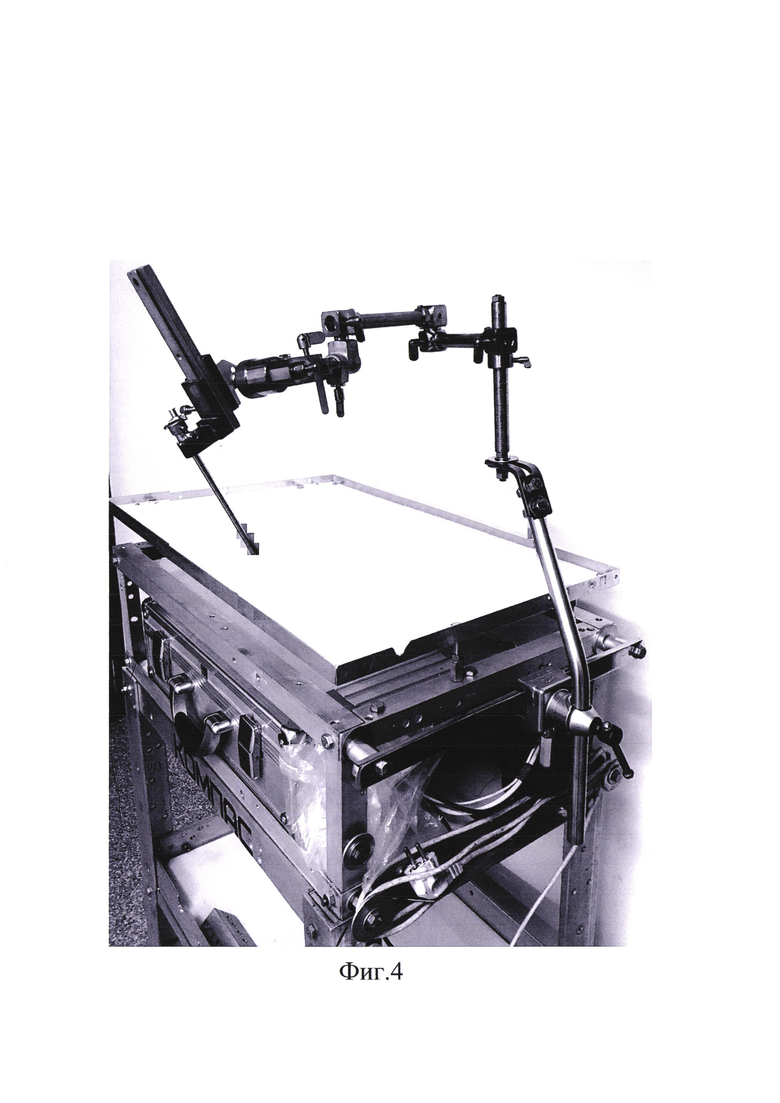
На фиг. 4 - Система хирургической навигации и микроманипуляций, общий вид, иллюстрационная.
На фиг. 1 - 4 представлено:
Фиксатор - 1.
Составная жесткая стойка вертикального перемещения - 2,
основная изогнутая составная часть (стойки 2) - 3,
дополнительная вертикальная составная часть с кольцом-ограничителем вертикального перемещения (стойки 2) - 4.
Рычаг основной горизонтального перемещения - 5,
рычаг промежуточный горизонтального перемещения - 6,
рычаг шарнирный горизонтального перемещения - 7.
Звено соединительное шарнирно-шаровое (рычага 7) - 8.
Звенья соединительные штыревые (стойки 2 и рычага 5, рычагов 5 и 6, рычагов 6 и 7) - 9.
Микроманипулятор - 10.
Суппорт (микроманипулятора 10) - 11,
каретка и направляющая (суппорта 11) - 12,
рукоятка (суппорта 11) - 13.
Блок передачи движения (микроманипулятора 10) -14.
Рычаг передачи движения (блока 14) - 15,
винт (рычага 15) - 16,
гайка-шарнир (рычага 15) -17,
рукоятка (рычага 15) - 18.
Рычаг установочный (блока 14) - 19,
винт (рычага 19) - 20,
гайка-шарнир (рычага 19) - 21,
рукоятка (рычага 19) - 22.
Система хирургической навигации и микроманипуляций включает устройство микроманипулятора 10 для проведения микроманипуляций и устройство пространственной ориентации инструмента для хирургической навигации.
Устройство пространственной ориентации инструмента для хирургической навигации содержит фиксатор 1, стойку 2 вертикального перемещения, рычаги горизонтального перемещения 5. 6, 7.
Фиксатор 1 закреплен на операционном столе и выполнен с возможностью вращения в одной плоскости. Стойка 2 вертикального перемещения имеет возможность возвратно-поступательного перемещения в фиксаторе 1. Рычаги горизонтального перемещения, по меньшей мере, основной 5, промежуточный 6, шарнирный 7 соединены с возможностью смещения в параллельных горизонтальных плоскостях и снабжены звеньями соединительными 8 и 9.
Стойка 2 вертикального перемещения имеет составную жесткую конструкцию и состоит из основной изогнутой составной части 3 и дополнительной вертикальной составной части 4 с кольцом-ограничителем вертикального перемещения.
Дополнительная вертикальная составная часть 4 закреплена посредством звена соединительного штыревого 9 с рычагом основным 5 горизонтального перемещения.
Кольцо-ограничитель имеет возможность выбора необходимой высоты расположения рычага основного 5 вдоль дополнительной вертикальной составной части 4.
При этом стойка 2 имеет дополнительно возможность вращательного перемещения в фиксаторе 1.
Рычаги основной 5, промежуточный 6, шарнирный 7 также закреплены между собой звеньями соединительными штыревыми 9.
Рычаг шарнирный 7 посредством звена соединительного шарнирно-шарового 8 жестко соединен с микроманипулятором 10.
Микроманипулятор 10 содержит суппорт 11 с рукояткой 13 и блок передачи движения 14.
Блок передачи движения 14 включает рычаг передачи движения 15 с рукояткой 18 и рычаг установочный 19 с рукояткой 22.
Каждый из рычагов 15 и 19 имеет крепежные элементы в виде винтов 16 и 20 и гаек-шарниров 17 и 21, соответственно.
Рукоятка 18 рычага передачи движения 15 закреплена гайкой-шарниром 17 на этом рычаге 15 и винтом 16 на суппорте 11.
Рукоятка 22 рычага установочного 19 закреплена гайкой-шарниром 21 на этом рычаге 19 и винтом 20 на рычаге передачи движения 15.
При нейрохирургических операциях систему используют следующим образом.
Голову пациента помещают на нейрохирургический подголовник.
Производят подготовку операционного поля, разрез кожи и мягких тканей на голове, формируют костное окно в костях черепа, диаметром не менее 20 мм для возможности размещения ультрасонографического датчика (УС датчика).
К металлической рейке на крае операционного стола жестко фиксируют фиксатор 1 на расстоянии около 50 см от головы пациента.
В фиксатор 1 помещают изогнутую составную часть 3 составной жесткой стойки 2 вертикального перемещения, таким образом, чтобы ее изгиб располагался как можно ниже и ближе к телу пациента, а дополнительная вертикальная составная стойка 4 была как можно ближе к середине ширины операционного стола.
На дополнительную вертикальную составную часть 4 составной жесткой стойки 2 устанавливают кольцо-ограничитель и фиксируют его на ней на необходимую высоту. Кольцо-ограничитель имеет возможность выбора необходимой высоты расположения рычага основного 5 вдоль дополнительной вертикальной составной стойки 4.
Дополнительную вертикальную составную часть 4 соединяют с рычагом основным 5, затем его с рычагом промежуточным 6, который соединяют с рычагом шарнирным 7 посредством звеньев соединительных штыревых 9.
Рычаг шарнирный 7 жестко соединен с микроманипулятором 10, имеющим широкую степень свободы перемещения за счет шарового шарнира.
На направляющую 12 каретки с рельсом микроманипулятора 10 помещают держатель с УС датчиком и устанавливают УС датчик на твердую мозговую оболочку, покрывающую головной мозг в области костного дефекта. Для улучшения ультразвукового изображения, область контакта УС датчика с твердой мозговой оболочкой орошают стерильным физиологическим раствором. На экране ультразвукового аппарата получают изображение головного мозга.
Затем, наклоняя УС датчик в разные стороны, за счет шарового шарнира, добиваются визуализации на мониторе ультразвукового аппарата хирургической мишени (например, опухоли мозга) и прохождения центральной акустической оси УС датчика, обозначенной на мониторе ультразвукового аппарата, через центр хирургической мишени. В таком положении фиксируют все подвижные звенья системы. При этом возникает неизбежное смещение центральной акустической оси УС датчика. Этот этап обеспечивает первичную (ориентировочную) хирургическую навигацию.
В пределах визуализируемой хирургической мишени на мониторе ультразвукового аппарата выбирают точку-мишень и, используя возможности микроманипулятора, ориентируют акустическую ось УС датчика на центр точки-мишени. Это вторичная (экспертная) хирургическая навигация.
На мониторе ультразвукового аппарата измеряют расстояние между УС датчиком и выбранной точкой-мишенью (глубина залегания точки-мишени). После этого держатель с УС датчиком заменяется, например, на держатель с нейроэндоскопом и этот держатель перемещается вдоль направляющей 12 на известную глубину, тем самым, кончик нейроэндоскопа вводят точно в точку-цель. При этом ось эндоскопа будет идентичной акустической оси УС датчика, а его кончик займет пространственное положение, соответствующее точке-цели.
Вместо нейроэндоскопа в точку цели могут вводиться другие инструменты, такие как биопсийная игла, вентрикулярный катетер, мозговой шпатель и др.
Во время операции инструменты могут меняться, при этом сохраняется идентичность их осей с расчетной акустической осью УС датчика.
При попадании инструмента в точку-мишень, с помощью микроманипулятора, осуществляют строго контролируемые хирургические манипуляции.
После завершения микроманипуляций, инструмент выводят из операционной раны.
Операцию завершают по общим правилам нейрохирургии.
Предлагаемая «Система хирургической навигации и микроманипуляций» изготовлена промышленным способом и использована при проведении нейрохирургических операций, что обусловливает, по мнению заявителя, соответствие изобретения критерию «промышленная применимость»
Предложенное изобретение позволяет:
- упростить состав системы хирургической навигации;
- унифицировать состав системы хирургической навигации;
- повысить точность хирургической навигации и микроманипуляций;
- повысить эксплуатационную надежность микроманипулятора;
- упростить работу хирурга при использовании системы;
- сократить длительность операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНСТРУКЦИЯ МИКРОМАНИПУЛЯТОРА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ИНСТРУМЕНТАРИЯ | 2019 |
|
RU2723759C1 |
| МЕХАНИЧЕСКИЙ МИКРОМАНИПУЛЯТОР (ВАРИАНТЫ) | 2018 |
|
RU2688487C1 |
| Интеграционная нейрохирургическая система Иова (варианты) | 2020 |
|
RU2773202C1 |
| Ретракторная система Иова | 2020 |
|
RU2736396C1 |
| Комплекс приспособлений Иова к головодержателю для микронейрохирургических операций | 2020 |
|
RU2755171C1 |
| СПОСОБ СТЕРЕОТАКСИЧЕСКОГО НАВЕДЕНИЯ | 1995 |
|
RU2121296C1 |
| ЭЛЕКТРОД-ПЕТЛЯ Иова ДЛЯ УДАЛЕНИЯ ФИКСИРОВАННОГО ВНУТРИЧЕРЕПНОГО КАТЕТЕРА С МОНОПОЛЯРНОЙ КОАГУЛЯЦИЕЙ ТКАНЕЙ | 2018 |
|
RU2676968C1 |
| Стереотаксический аппарат | 1985 |
|
SU1377080A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| МИКРОМАНИПУЛЯТОР | 1933 |
|
SU38799A1 |

Изобретение относится к медицине, а именно к системам хирургической навигации и микроманипуляций. Система включает устройство микроманипулятора для проведения микроманипуляций и устройство пространственной ориентации инструмента для хирургической навигации. Устройство пространственной ориентации содержит фиксатор (1), стойку вертикального перемещения (2) и рычаги горизонтального перемещения, по меньшей мере, основной (5), промежуточный (6), шарнирный (7), соединенные с возможностью смещения в параллельных горизонтальных плоскостях и снабженные звеньями соединительными. Фиксатор закреплен на операционном столе и выполнен с возможностью вращения в одной плоскости. Стойка имеет возможность возвратно-поступательного перемещения в фиксаторе. Стойка имеет составную жесткую конструкцию и состоит из основной изогнутой составной части (3) и дополнительной вертикальной составной части (4) с кольцом-ограничителем вертикального перемещения. Дополнительная вертикальная составная часть закреплена посредством звена соединительного штыревого (9) с рычагом основным горизонтального перемещения. Кольцо-ограничитель имеет возможность выбора необходимой высоты расположения рычага основного вдоль дополнительной вертикальной составной части. Стойка имеет возможность вращательного перемещения в фиксаторе. Рычаги основной, промежуточный и шарнирный закреплены между собой звеньями соединительными штыревыми. Рычаг шарнирный посредством звена соединительного шарнирно-шарового (8) жестко соединен с микроманипулятором (10). Микроманипулятор содержит суппорт с рукояткой и блок передачи движения, включающий рычаг передачи движения с рукояткой и рычаг установочный с рукояткой, причем каждый из этих рычагов имеет крепежные элементы в виде винтов и гаек-шарниров. Рукоятка рычага передачи движения закреплена гайкой-шарниром на этом рычаге и винтом на суппорте. Рукоятка рычага установочного закреплена гайкой-шарниром на этом рычаге и винтом на рычаге передачи движения. Достигается повышение точности хирургической навигации и микроманипуляций, повышение эксплуатационной надежности микроманипулятора, а также сокращение длительности операции. 4 ил.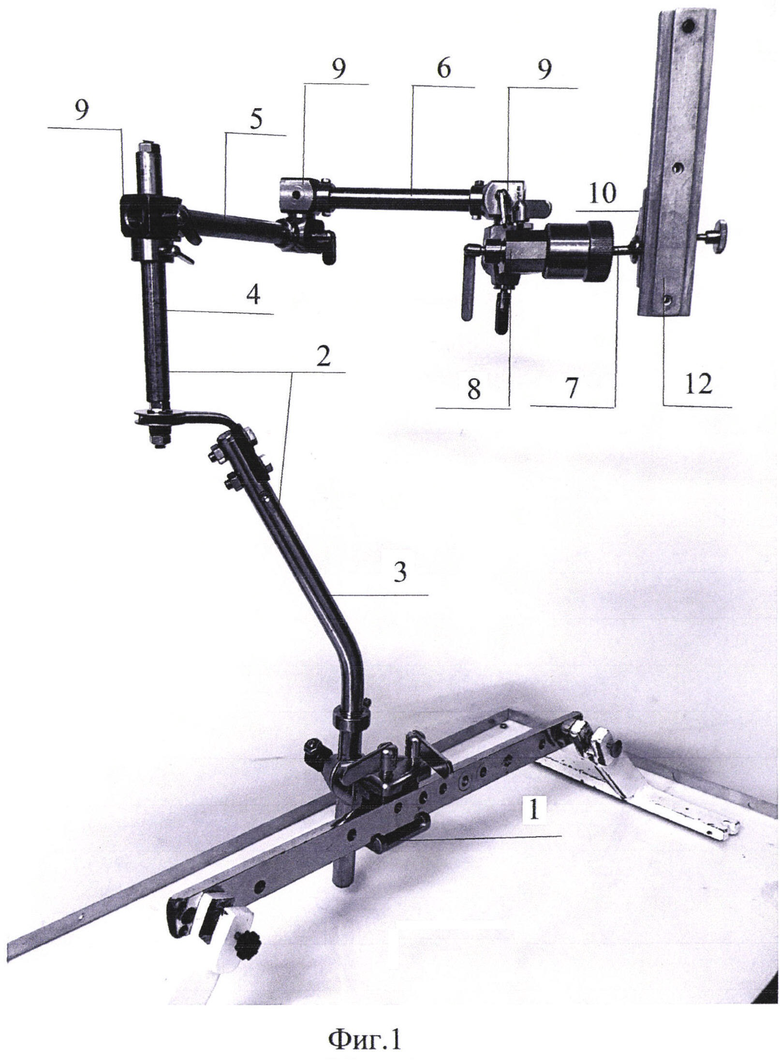
Система хирургической навигации и микроманипуляций, включающая устройство микроманипулятора для проведения микроманипуляций и устройство пространственной ориентации инструмента для хирургической навигации, содержащее фиксатор, закрепленный на операционном столе и выполненный с возможностью вращения в одной плоскости, стойку вертикального перемещения, имеющую возможность возвратно-поступательного перемещения в фиксаторе, рычаги горизонтального перемещения, по меньшей мере, основной, промежуточный, шарнирный, соединенные с возможностью смещения в параллельных горизонтальных плоскостях и снабженные звеньями соединительными, отличающаяся тем, что стойка вертикального перемещения имеет составную жесткую конструкцию и состоит из основной изогнутой составной части и дополнительной вертикальной составной части с кольцом-ограничителем вертикального перемещения, причем дополнительная вертикальная составная часть закреплена посредством звена соединительного штыревого с рычагом основным горизонтального перемещения, а кольцо-ограничитель имеет возможность выбора необходимой высоты расположения рычага основного вдоль дополнительной вертикальной составной части, при этом стойка имеет дополнительно возможность вращательного перемещения в фиксаторе, кроме того, рычаги основной, промежуточный и шарнирный закреплены между собой звеньями соединительными штыревыми, при этом рычаг шарнирный посредством звена соединительного шарнирно-шарового жестко соединен с микроманипулятором, который содержит суппорт с рукояткой и блок передачи движения, включающий рычаг передачи движения с рукояткой и рычаг установочный с рукояткой, причем каждый из этих рычагов имеет крепежные элементы в виде винтов и гаек-шарниров, соответственно, при этом рукоятка рычага передачи движения закреплена гайкой-шарниром на этом рычаге и винтом на суппорте, а рукоятка рычага установочного закреплена гайкой-шарниром на этом рычаге и винтом на рычаге передачи движения.
| Протез ступни | 1933 |
|
SU35969A1 |
| СИСТЕМА В КОМПЛЕКСЕ И УСТРОЙСТВО ДЛЯ ГЕНЕРИРОВАНИЯ АЭРОЗОЛЯ, СОДЕРЖАЩЕЕ ЕЕ | 2021 |
|
RU2822054C1 |
| US 5762458 A1, 09.06.1998 | |||
| DE 202012008912 U1, 15.05.2014 | |||
| DE 3108766 C2, 15.12.1983. | |||

