Изобретение относится к системам управления огнем, объединяющим комплекс датчиков и технических средств вооружения и военной техники и обеспечивающим поиск, обнаружение, опознавание целей, подготовку вооружений к стрельбе, их наведение и решение задачи поражения цели огнем основного и вспомогательного вооружения боевой машины (корабля, самолета).
Из уровня техники по патенту на изобретение RU2824569 от 11.08.2023 “Бронированная гусеничная или колесная боевая машина” известна бронированная гусеничная или колесная боевая машина (далее по тексту - «Стрелковая боевая машина», «D1»), на верхней поверхности корпуса которой установлена вращающаяся башня, выполняющая функцию опорной платформы для оборудованного в башне поворотного в вертикальной плоскости механизма, одного или в связке с вращающимся в горизонтальной плоскости механизмом. На указанном механизме через направляющую прорезь в корпусе башни установлена и меняет свое положение телескопическая штанга. Указанная штанга имеет возможность раздвижения вдоль своей продольной оси симметрии, которое приводит к увеличению длины телескопической штанги. На своем верхнем окончании телескопическая штанга заканчивается поворотным узлом, состоящим из вращающихся в горизонтальной плоскости и поворотных в вертикальной плоскости механизмов. На указанном механизме подвижно закреплен подъемный боевой модуль, оборудованный дистанционно управляемой снайперской установкой - высокоточной системой стрелкового оружия.
Модуль управления огнем Стрелковой боевой машины, оборудованный, по меньшей мере, приборами наблюдения, измерения и прицеливания, расположен цельно или разрозненно на подъемном боевом модуле Стрелковой боевой машины. Заявленный модуль предназначен для взаимодействия со средством поражения рассматриваемой боевой машины - дистанционно управляемой снайперской установкой - высокоточной системой стрелкового оружия. Модуль управления огнем Стрелковой боевой машины объединяет комплекс датчиков и технических средств дистанционно управляемой снайперской установки и обеспечивает для нее поиск, обнаружение и опознавание целей, а также подготовку снайперской установки к стрельбе, ее наведение и решение задачи огневого поражения цели.
Стрелковая боевая машина, в том числе предназначена для уничтожения наиболее важных, скрытых или сильно удаленных целей противника, таких как расчетов ПТУР и ПЗРК, снайперов, офицеров, корректировщиков, малогабаритных беспилотных летательных аппаратов (БПЛА).
Основным недостатком D1 является то, что ее подъемному боевому модулю после его развертывания в боевое положение, в процессе поиска, обнаружения и опознавания целей, приходится долгое время находиться на открытом поражаемом пространстве, которое обстреливает противник из различных огневых средств.
Настоящее изобретение направлено на решение технической задачи по сокращению времени нахождения развернутого в боевое положение боевого модуля D1 на открытом поражаемом пространстве, которое обстреливает противник из различных огневых средств.
Техническим результатом, достигаемым при использовании предложенного изобретения, является повышение эффективности использования и расширение эксплуатационных и боевых возможностей Стрелковой боевой машины, как при оборонительных, так и при наступательных боевых действиях.
Указанный технический результат достигается тем, что модуль управления огнем боевой машины, оборудованный, по меньшей мере, приборами наблюдения, измерения и прицеливания, расположенный цельно или разрозненно на корпусе боевой машины, в том числе на ее башне и/или боевом модуле, предназначенный для взаимодействия со средством поражения боевой машины, одним или несколькими, одного типа или разных типов, по меньшей мере, таких как артиллерийские орудия, пулеметы, огнеметы, гранатометы, ракетные пусковые установки, отличающийся тем, что помимо штатного модуля управления огнем боевой машины, расположенного на корпусе боевой машины, в том числе на ее башне и/или боевом модуле, применяется дополнительный модуль управления огнем боевой машины, один или несколько, оборудованный, по меньшей мере, приборами наблюдения, измерения и прицеливания, расположенный цельно или разрозненно в отдельном от боевой машины и ее средств поражения корпусе-кожухе, одном или нескольких, выполненном в пыле-влаго-ударозащищенном исполнении и в переносном варианте, при этом такой дополнительный дистанционный модуль управления огнем боевой машины имеет автономное электропитание и дистанционно взаимодействует со средством поражения боевой машины, одним или несколькими, через кабель, один или несколько, и/или по радиоканалу, одному или нескольким.
Указанные признаки являются существенными и взаимосвязаны между собой с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого технического результата.
Отличительные особенности заявленного модуля управления огнем боевой машины не были обнаружены при поиске известных устройств аналогичного назначения, что свидетельствует о том, что данное техническое решение соответствует условиям патентоспособности.
Настоящее изобретение поясняется конкретным примером его способа эксплуатации и боевого применения, который, однако, не является единственно возможным, но наглядно демонстрирует возможности достижения приведенной совокупностью признаков требуемого технического результата.
Вариант выполнения рассматриваемой Стрелковой боевой машины и ее отдельных элементов представлены на следующих чертежах:
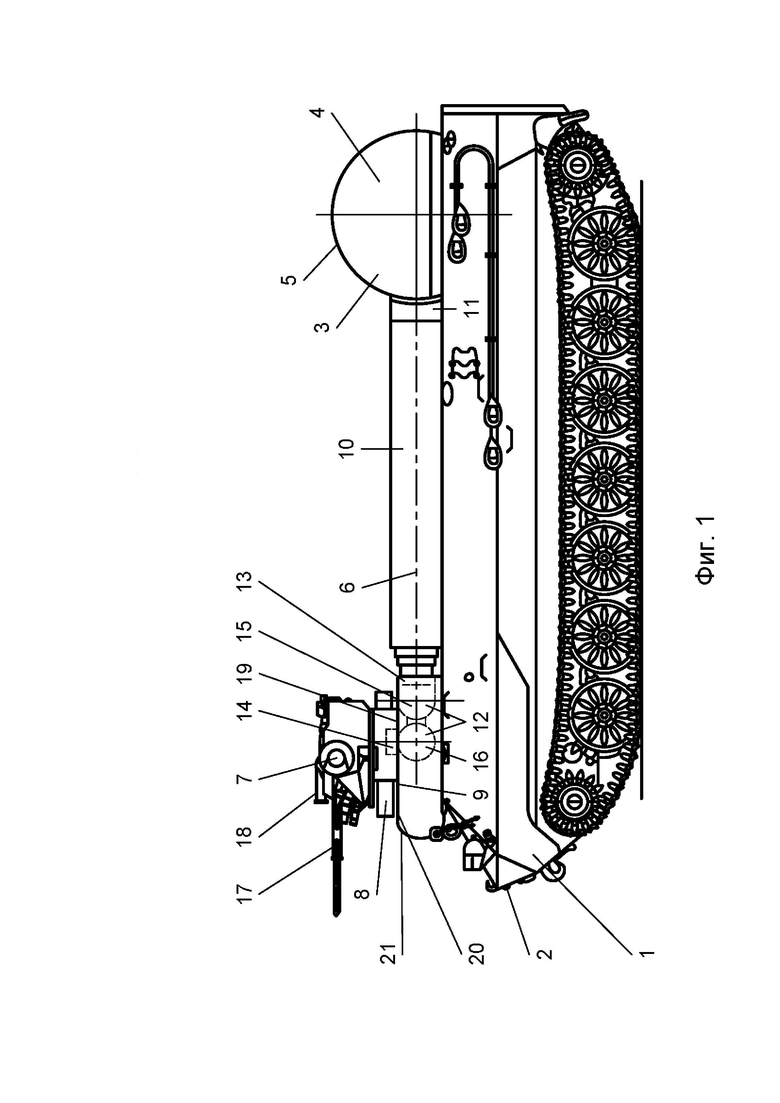
Фиг. 1 - вид сбоку на Стрелковую боевую машину на гусеничном ходу в варианте исполнения, при котором подъемная мачта представляет собой отдельную телескопическую штангу, оборудованную на своем окончании подъемным боевым модулем, оснащенным дистанционно управляемыми стрелковой снайперской установкой и пусковыми установками ракетного вооружения, в момент, когда подъемная мачта и подъемный боевой модуль находятся в транспортном положении.
Согласно настоящему изобретению рассматривается дополнительный дистанционный модуль управления огнем боевой машины.
Дополнительный дистанционный модуль управления огнем боевой машины оборудован, по меньшей мере, приборами наблюдения, измерения и прицеливания.
Заявленный модуль предназначен для взаимодействия со средством поражения боевой машины - дистанционно управляемой снайперской установкой - высокоточной системой стрелкового оружия. Модуль управления огнем боевой машины объединяет комплекс датчиков и технических средств дистанционно управляемой снайперской установки и обеспечивает для нее поиск, обнаружение и опознавание целей, а также подготовку снайперской установки к стрельбе, ее наведение и решение задачи огневого поражения цели.
Дополнительный дистанционный модуль управления огнем боевой машины, один или несколько, расположен цельно или разрозненно в отдельном от боевой машины и ее средств поражения корпусе-кожухе, одном или нескольких.
Указанный корпус-кожух выполнен в пыле-влаго-ударозащищенном исполнении и в переносном варианте, при этом дополнительный дистанционный модуль управления огнем боевой машины имеет автономное электропитание и дистанционно взаимодействует со средством поражения боевой машины, одним или несколькими, через кабель, один или несколько, и/или по радиоканалу, одному или нескольким.
Рассматриваемый вариант бронированной гусеничной или колесной боевой машины - Стрелковая боевая машина 1 (Фиг. 1) представляет собой наземное механическое транспортное средство с собственным двигателем, независимым приводом, бортовой системой электроснабжения и гусеничной или колесной ходовой частью.
На верхней поверхности корпуса 2 боевой машины 1 установлена вращающаяся башня 3, которая выполняет функцию опорной платформы для оборудованного в башне 3 поворотного в вертикальной плоскости механизма 4. На механизме 4 через направляющую прорезь 5 в корпусе башни 3 установлена и меняет свое положение подъемная мачта 6.
На внешнем конце подъемной мачты 6 подвижно закреплен беспилотный подъемный боевой модуль 7 с подвешенными к нему пусковыми установками ракетного вооружения 8.
Пополнение боекомплекта пусковых установок ракетного вооружения 8 и других средств поражения, расположенных в подъемном боевом модуле 7, производится автоматически или с помощью членов экипажа из запаса боеприпасов внутри боевой машины 1 через проемы 9 в ее корпусе 2 после опускания подъемного боевого модуля 7 на корпус 2 боевой машины 1.
В рассматриваемом варианте исполнения боевой машины 1 (Фиг. 1) подъемная мачта 6 представляет собой отдельную телескопическую штангу 10, имеющую возможность раздвижения вдоль своей продольной оси симметрии, которое приводит к увеличению длины телескопической штанги 10. Телескопическая штанга 10 своим нижним окончанием через направляющую прорезь 5 в корпусе вращающейся башни 3 боевой машины 1 подвижно установлена на поворотном в вертикальной плоскости механизме 4, который оборудован во вращающейся башне 3, одном или в связке с вращающимся в горизонтальной плоскости механизмом 11.
На своем верхнем окончании телескопическая штанга 10 заканчивается поворотным узлом 12, состоящим из вращающихся в горизонтальной плоскости механизмов 13 и 14 и поворотных в вертикальной плоскости механизмов 15 и 16.
На поворотном узле 12 подвижно закреплен подъемный боевой модуль 7, оборудованный дистанционно управляемой снайперской установкой 17 - высокоточной системой стрелкового оружия и пусковыми установками ракетного вооружения 8 такого типа, как барражирующие боеприпасы и/или зенитные ракеты класса «поверхность-воздух» и/или ракеты класса «поверхность-поверхность» и/или универсальные противовоздушные и противотанковые ракеты.
В дополнение к вооружению на корпусе подъемного боевого модуля 7 оборудованы приборы управления огнём снайперской установки 17 и пусковых установок ракетного вооружения 8, по меньшей мере, такие как приборы 18 наблюдения, измерения и прицеливания.
Пополнение боекомплекта подъемного боевого модуля 7 производится автоматически или с помощью членов экипажа после сворачивания в транспортное или в любое другое удобное для такой операции положение подъемной мачты 6, состоящей из отдельной телескопической штанги 10 и последующего за таким сворачиванием подъемной мачты 6 опускания или прислонения подъемного боевого модуля 7 на предназначенное для такой операции штатное место 19 корпуса 2 боевой машины 1 или ее вращающейся башни 3. В результате чего происходит совмещение проемов 9 корпуса 2 боевой машины 1 или ее вращающейся башни 3 и корпуса подъемного боевого модуля 7, предназначенных для пополнения боекомплекта из запаса боеприпасов, находящихся внутри корпуса 2 боевой машины 1 или ее вращающейся башни 3.
Для точной установки подъемного боевого модуля 7 на штатное место 19 корпуса 2 боевой машины 1 или ее вращающейся башни 3, предназначенное для пополнения боекомплекта подъемного боевого модуля 7, такое место 19 корпуса 2 боевой машины 1 или ее вращающейся башни 3 выполнено в виде ниши 20 и/или обрамлено направляющим профилем 21, повторяющими форму предназначенной для такой операции плоскости корпуса подъемного боевого модуля 7.
Бронированная гусеничная или колесная боевая машина в варианте исполнения Стрелковой боевой машины (Фиг. 1), оборудованная дополнительным дистанционным модулем управления огнем, одним или несколькими, имеет, например, следующий способ эксплуатации и боевого применения:
Способ эксплуатации и боевого применения предложенного изобретения на примере Стрелковой боевой машины 1 в условиях городского боя при штурме опорного пункта противника, расположенного в многоэтажном здании
После анализа разведывательных данных, полученных в том числе с помощью малогабаритных беспилотных летательных аппаратов (БПЛА), в идеале специальной компьютерной программой оперативно составляется компьютерная 3-D модель городского района, где находятся многоэтажное здание, захват которого планируется, и другие рядом расположенные здания, сооружения, элементы городского ландшафта. В результате составления такой 3D-модели определяются точки и углы секторов обстрелов со стороны огневых точек противника и, на основании этого в местах контроля своих подразделений изыскиваются закрытые позиции для размещения единиц рассматриваемой Стрелковой боевой машины.
Такие позиции должны быть естественным образом защищены, по меньшей мере, от неприятельского ружейно-пулемётного, гранатометного, артиллерийского огня прямой наводкой, артиллерийского (пушечного) настильного огня и минометного навесного огня. Наиболее подходящие для таких закрытых позиций являются места с тыльной по отношению к противнику части зданий, сооружений и других выступающих элементов городского ландшафта, включая образованные в результате боевых действий развалины, воронки, завалы и прочее.
Следует отметить, что разведывательные мероприятия не прекращаются в течение всего времени проведения указанной боевой операции. Например, в том числе с помощью союзных малогабаритных беспилотных летательных аппаратов (БПЛА), обеспечивается непрерывная прямая трансляция аэросъёмки городского района, где находится многоэтажное здание, захват которого планируется, на экраны средств связи союзных бойцов и их командиров, включая членов экипажей единиц Стрелковой боевой машины 1.
На подобранные указанные закрытые позиции выезжают и размещаются, в зависимости от количества неприятельских сил, от одной до нескольких единиц Стрелковой боевой машины 1.
Одновременно с этим в подходящих местах, расположенных на определенных высотных отметках, например, в оконных проемах здания, находящегося под контролем союзных подразделений, скрытно помещаются один или несколько дополнительных дистанционных модулей управления огнем боевой машины. При этом заявленные модули помещаются так, чтобы их приборы наблюдения, измерения и прицеливания были направлены на определенный участок вражеских позиций (построек или элементов местности, занятых противником). Все установленные модули управления огнем тщательно маскируются и подключаются к автономному электропитанию. Далее модули настраиваются для непрерывного взаимодействия со средствами поражения боевой машины 1 - дистанционно управляемой снайперской установкой 17 и пусковыми установками ракетного вооружения 8. Такое взаимодействие обеспечивает для перечисленных средств поражения боевой машины 1 поиск, обнаружение и опознавание целей, подготовку снайперской стрелковой и пусковой ракетной установок 17 и 8 к стрельбе, их наведение и решение задачи огневого поражения целей.
Тем временем после установки на закрытой позиции отдельной единицы Стрелковой боевой машины 1, подъемная мачта 6 которой состоит из отдельной телескопической штанги 10 (Фиг. 1), приводят в движение вращающуюся башню 3, а также поворотные и вращающиеся механизмы 4, 11, 13, 14, 15, 16. Одновременно с этим раздвигают до нужной длины отдельную телескопическую штангу 10 и поворачивают в сторону выбранного сектора обстрела подъемный боевой модуль 7.
В результате перечисленных манипуляций с подъемной мачтой 6 оперативно устанавливается временная огневая точка - подъемный боевой модуль 7 с дистанционно управляемыми снайперской стрелковой установкой 17 и пусковыми установками ракетного вооружения 8. При этом указанные средства поражения боевой машины 1 для осуществления своевременной и точной стрельбы взаимодействуют, как со штатными приборами наблюдения, измерения и прицеливания 18 подъемного боевого модуля 7, так и с приборами наблюдения, измерения и прицеливания дополнительных дистанционных модулей управления огнем боевой машины.
Такая временная огневая точка устанавливается в необходимой и доступной в радиусе действия подъемной мачты 6 высотной отметке городского ландшафта. Например, над выступающим элементом городского ландшафта искусственного или природного происхождения или рядом с ним. При этом боевая машина 1, ее вращающаяся башня 3 и большая часть подъемной мачты 6 остаются естественным образом скрытыми и защищенными от огневого воздействия противника посредством зданий, сооружений и других выступающих элементов городского ландшафта, с тыльной по отношению к противнику части которых эта боевая машина установлена.
Следует отметить, что такая временная стрелковая огневая точка не является статичной и может в случае необходимости в любой момент перемещаться в любую другую доступную в радиусе действия подъемной мачты 6 высотную отметку над выступающим элементом городского ландшафта или рядом с ним или за ним, например, для изменения своего сектора обстрела, временного укрытия от вражеского огня, пополнения боекомплекта.
При этом экипаж боевой машины 1 старается минимизировать периоды времени нахождения развернутого в боевое положение подъемного боевого модуля 7 на открытом поражаемом пространстве, которое обстреливает противник из различных огневых средств. Для этого одновременно с использованием приборов наблюдения, измерения и прицеливания 18 подъемного боевого модуля 7 экипаж боевой машины 1 использует один или несколько дополнительных дистанционных модулей управления огнем боевой машины 1, расположенных на значительном удалении от боевой машины 1, например, в оконных проемах верхних этажей здания, находящегося под контролем союзных подразделений.
В соответствии с такой тактикой, когда беспилотный подъемный боевой модуль 7 вместе со своей боевой машиной 1 находится в недостигаемом для огневых средств противника пространстве, постоянный мониторинг в режиме 24/7 возможных целей противника проводится дополнительными дистанционными модулями управления огнем боевой машины 1. В случае обнаружения возможной цели противника, например, малогабаритного беспилотного летательного аппарата (БПЛА), с дополнительных дистанционных модулей управления огнем боевой машины 1 передается целеуказание (по меньшей мере, результаты наблюдения, измерения и прицеливания) на приборы наблюдения, измерения и прицеливания 18 подъемного боевого модуля 7 и, соответственно, оборудованной в нем дистанционно управляемой снайперской установки - высокоточной системы стрелкового оружия 17 подъемного боевого модуля 7.
В результате этого приводят в движение вращающуюся башню 3, а также поворотные и вращающиеся механизмы 4, 11, 13, 14, 15, 16, раздвигают до нужной длины отдельную телескопическую штангу 10 и поворачивают в сторону выбранного сектора обстрела подъемный боевой модуль 7. Снайперская установка 17 согласно переданному целеуказанию производит необходимое количество выстрелов до полного уничтожения выбранной цели противника. После уничтожения цели приводят в движение вращающуюся башню 3, а также поворотные и вращающиеся механизмы 4, 11, 13, 14, 15, 16, задвигают до нужной длины отдельную телескопическую штангу до перемещения подъемного боевого модуля 7 в недостигаемое для огневых средств противника пространство.
В таком осторожном и скрытном режиме Стрелковая боевая машина 1 в режиме 24/7 обеспечивает эффективное боевое дежурство. Основными задачами Стрелковой боевой машины 1 в указанном способе эксплуатации и боевого применения предложенного изобретения в условиях городского боя являются:
- безостановочное эффективное огневое воздействие на все огневые точки опорного пункта противника, расположенного в многоэтажном здании или рядом с ним или на подступах к нему;
- уничтожение наиболее важных, скрытых или сильно удаленных целей противника, таких как расчетов ПТУР и ПЗРК, снайперов, офицеров, корректировщиков, малогабаритных беспилотных летательных аппаратов (БПЛА);
- обеспечение постоянного психологического прессинга противника, подавление его боевого духа и деморализация;
- воспрещение для личного состава противника пересечения нейтральной полосы и перемещения в неприятельский опорный пункт, расположенный в многоэтажном здании, или из него или внутри него.
Установленная на заранее подобранную закрытую позицию в месте контроля союзных подразделений Стрелковая боевая машина 1 ведет безостановочную боевую работу по уничтожению перечисленных целей и огневых средств опорного пункта противника, расположенного в многоэтажном здании или рядом с ним или на подступах к нему, до момента полного захвата опорного пункта союзными подразделениями.
Заявленный дополнительный дистанционный модуль управления огнем боевой машины может быть выполнен в различных габаритных размерах и иметь различные дизайнерские решения, в том числе обеспечивающие ему максимальные обзорные и маскировочные характеристики.
Настоящее изобретение на примере Стрелковой боевой машины 1 возможно использовать в первую очередь для боевой техники, предназначенной для нанесения ущерба противнику при выполнении боевых задач, в том числе в процессе боевой работы при использовании различного вида укрытий. Например, для бронированных боевых машин, оснащенных стрелковым, артиллерийским, ракетным вооружением, таких как основные танки, боевые машины пехоты (БМП), боевые машины десантные (БМД), бронетранспортеры (БТР), самоходные артиллерийские установки (САУ) и прочее.
Настоящее изобретение промышленно применимо, так как может быть реализовано с использованием известных технологий, применяемых в производстве автоматизированных систем и оптико-электронные комплексов управления огнем основного и вспомогательного вооружения боевой машины (корабля, самолета).
| название | год | авторы | номер документа |
|---|---|---|---|
| БРОНИРОВАННАЯ ГУСЕНИЧНАЯ ИЛИ КОЛЕСНАЯ БОЕВАЯ МАШИНА | 2023 |
|
RU2824569C1 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| Мобильная артиллерийско-оружейная система | 2023 |
|
RU2836249C2 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| Боевой модуль с магнитожидкостным компенсатором отдачи | 2023 |
|
RU2825790C1 |
| Автоматизированный боевой комплекс | 2018 |
|
RU2724448C1 |
| АВТОНОМНЫЙ КОМПЛЕКС БРОНИРОВАННЫХ ГУСЕНИЧНЫХ МАШИН | 2003 |
|
RU2242699C2 |
| ФОРТИФИКАЦИОННАЯ РЕАКТИВНАЯ ОГНЕВАЯ СИСТЕМА | 2014 |
|
RU2617860C2 |
| МНОГОЦЕЛЕВАЯ НАБЛЮДАТЕЛЬНО-ОГНЕВАЯ ВЫШКА | 2018 |
|
RU2681131C1 |
Изобретение относится к системам управления огнем, объединяющим комплекс датчиков и технических средств вооружения и военной техники и обеспечивающим поиск, обнаружение, опознавание целей, подготовку вооружений к стрельбе, их наведение и решение задачи поражения цели огнем основного и вспомогательного вооружения боевой машины (корабля, самолета). Модуль управления огнем боевой машины оборудован приборами наблюдения, измерения и прицеливания, и расположен разрозненно на корпусе боевой машины, в том числе на ее башне и боевом модуле. Модуль управления огнем боевой машины предназначен для взаимодействия с несколькими средствами поражения боевой машины разных типов, по меньшей мере, таких как артиллерийские орудия, пулеметы, огнеметы, гранатометы, ракетные пусковые установки. При этом введен дополнительный модуль управления огнем боевой машины, оборудованный приборами наблюдения, измерения и прицеливания, расположенный разрозненно в нескольких отдельных от боевой машины и ее средств поражения корпусах-кожухах, выполненных в пыле-влаго-ударозащищенном исполнении и с возможностью их переноса. Такой дополнительный дистанционный модуль управления огнем боевой машины имеет автономное электропитание и дистанционно взаимодействует с несколькими средствами поражения боевой машины через несколько кабелей. Технический результат – повышение эффективности использования и расширение эксплуатационных и боевых возможностей боевой машины. 1 ил.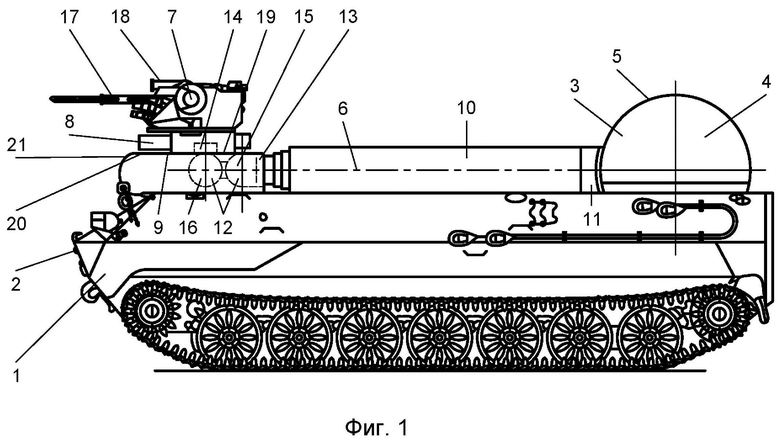
Модуль управления огнем боевой машины, оборудованный приборами наблюдения, измерения и прицеливания, расположенный разрозненно на корпусе боевой машины, в том числе на ее башне и боевом модуле, предназначенный для взаимодействия с несколькими средствами поражения боевой машины разных типов, по меньшей мере, таких как артиллерийские орудия, пулеметы, огнеметы, гранатометы, ракетные пусковые установки, отличающийся тем, что введен дополнительный модуль управления огнем боевой машины, оборудованный приборами наблюдения, измерения и прицеливания, расположенный разрозненно в нескольких отдельных от боевой машины и ее средств поражения корпусах-кожухах, выполненных в пыле-влаго-ударозащищенном исполнении и с возможностью их переноса, при этом такой дополнительный дистанционный модуль управления огнем боевой машины имеет автономное электропитание и дистанционно взаимодействует с несколькими средствами поражения боевой машины через несколько кабелей.
| ФУНГИЦИДНАЯ СМЕСЬ | 0 |
|
SU184753A1 |
| Разведывательно-огневой комплекс вооружения БМОП | 2016 |
|
RU2658517C2 |
| СТАТЬЯ "ВОЙНА С ПЛАНШЕТОМ В РУКАХ | |||
| КОМПЛЕКС "СТРЕЛЕЦ-М", РАЗМЕЩЕННАЯ В СЕТИ ИНТЕРНЕТ 12.09.2020 | |||
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| US 7086318 B1, 08.08.2006. | |||

