Изобретение относится к области гидроакустики, а именно к пассивным шумопеленгаторным станциям (ШПС), предназначенным для обнаружения подводных объектов (подводных лодок и подводных аппаратов) и надводных объектов по их шумоизлучению.
Наиболее сложными задачами, решаемыми такими ШПС, являются классификация обнаруженного объекта и определение дистанции до него.
Методы классификации и определения дистанции шумящих объектов приведены в работах [1, 6-15]. Недостатком большинства известных методов являются дополнительные требования, предъявляемые ими к конструкции ШПС (например, разнесенный прием шумовых сигналов) либо к обработке принимаемого шумового сигнала (например, спектрально-корреляционный анализ). В ряде случаев выполнение этих дополнительных требований затруднительно.
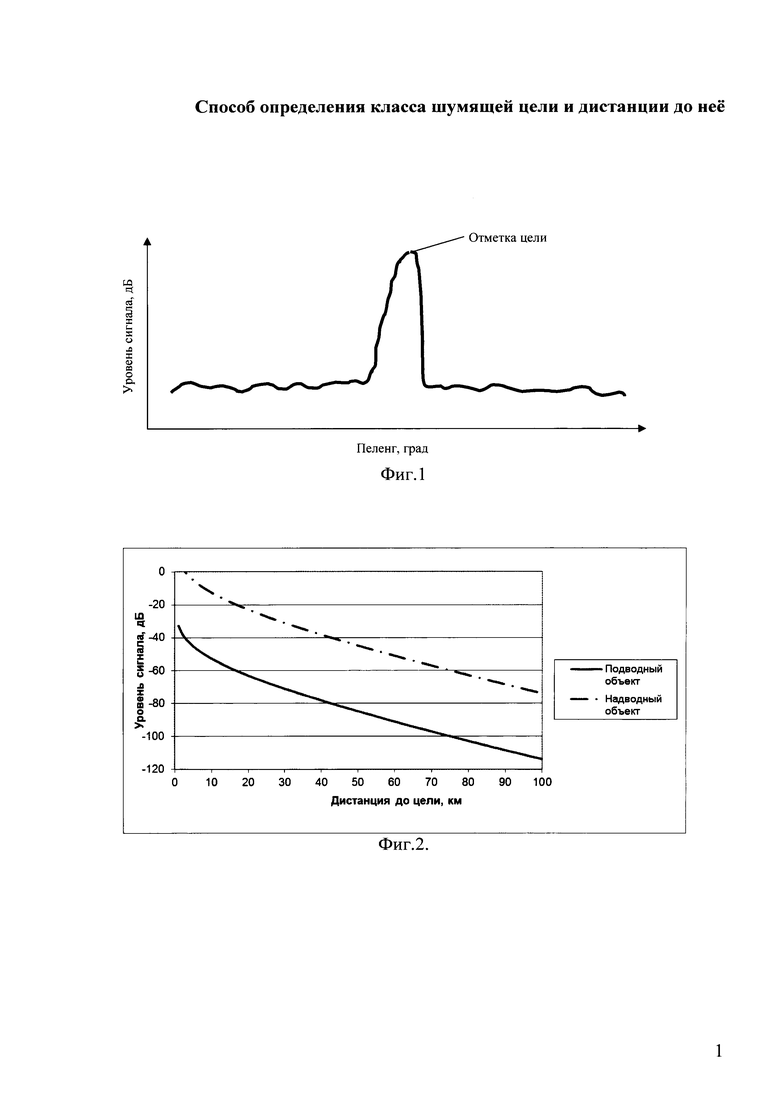
В качестве прототипа выберем способ классификации и определения дистанции обнаруженной шумящей цели, описанный в [4]. Он включает: формирование пеленгаци-онного рельефа (фиг. 1) на выходе горизонтального веера характеристик направленности (ХН) приемной гидроакустической антенны (далее - приемной антенны); обнаружение в пеленгационном рельефе методом двухстороннего контраста отметки цели; прослушивание оператором сигнала с выхода ХН, ось которой совпадает с максимумом отметки цели; принятие оператором по результатам прослушивания сигнала решения о классе цели и дистанции до нее.
Достоинством данного способа является его простота, а недостатком - невысокая эффективность (точность) классификации и определения дистанции, особенно при малых отношениях сигнал/помеха, при которых человеческий слух плохо улавливает особенности сигнала, присущие тому либо иному объекту.
Решаемая техническая проблема - повышение эффективности ШПС.
Достигаемый технический результат - повышение достоверности классификации и точности определения дистанции цели.
Сущность предлагаемого способа заключается в том, что с использованием пелен-гационного рельефа измеряют уровень сигнала от цели и ширину отметки обнаруженной цели и на основании полученных результатов принимают решение о классе и дистанции цели.
Обоснуем эффективность данного технического решения.
Известно следующее [2-5]:
1) Энергетические спектры подводного объекта и надводного объекта в точке излучения имеют идентичную форму, описываемую функцией

где S0/ω - спектральная плотность мощности шумоизлучения, зависящая от класса цели ω, на частоте сигнала от цели равной 1 кГц в полосе 1 Гц, называемая приведенной шумностью цели, Па2/Гц;
ƒ - частота сигнала от цели, кГц;
ƒ0 - приведенная частота, равная 1 кГц;
2) Приведенная шумность надводного объекта в среднем на 40 дБ превышает шумность современных подводных объектов, т.е.

3) Уровень сигнала от цели Uω(R), соответствующий максимуму отметки в пеленгационном рельефе, связан с дистанцией до цели формулой

где ƒH, ƒB - нижняя и верхняя границы рабочего диапазона частот, Гц;
γ(ƒ)- частотная зависимость передаточной характеристики линейной части приемного тракта ШПС, В/Па;
Sω(ƒ,R) - энергетический спектр на входе приемной антенны ШПС сигнала от цели класса ω, находящейся на расстоянии R от антенны, Па2/Гц, определяемый по формуле:

β(ƒ) - коэффициент пространственного затухания, дБ/км, вычисляемый по формуле:

a, b, с - коэффициенты, зависящие от района Мирового океана;
A(ƒ,R) - аномалия (по мощности) распространения сигнала (далее - аномалия распространения сигнала) частоты ƒ на расстояние R (рассчитывается для текущих гидроакустических условий по специальной программе);
Подставляя в формулу (3) формулу (4), получим:

4) Крутизна спада энергетического спектра сигнала от цели в сторону высоких частот при распространении в водной среде возрастает за счет более быстрого затухания высоких частот вследствие частотной зависимости коэффициента пространственного затухания β(ƒ) и частотной зависимости аномалии распространения сигнала от цели, которая определяется, в том числе частотно зависимыми коэффициентами отражения сигнала от границ волновода (дна и поверхности). По этой причине с увеличением расстояния до цели эквивалентная частота сигнала от цели от нее в рабочей полосе частот [ƒH, ƒB] смещается в сторону низких частот и, как следствие, ширина отметки цели в пеленгационном рельефе возрастает.
5) Ширина отметки обнаруженной цели Δα(R), град, в пеленгационном рельефе (далее - ширина отметки), измеренная на уровне половины мощности, определяется решением относительно Δα(R) уравнения
где D(ƒ,Δθ,L) - значение нормированной ХН приемной антенны на частоте ƒ в направлении, отстоящем от оси ХН на горизонтальный угол θΔ при горизонтальном эффективном размере приемной антенны L;
S(ƒ,R) - энергетический спектр на входе приемной антенны ШПС сигнала от цели.
Уравнение (7) при подстановке в него формулы (4) и сокращении идентичных констант в числителе и знаменателе принимает вид:

Заметим, что уровень сигнала от цели Uω(R) зависит как от дистанции до цели, так и от ее класса, а ширина отметки Δα(R) зависит только от дистанции до цели. Этот факт дает возможность, подставив измеренные значения уровня сигнала от цели и ширины отметки в качестве значений в функции Uω(R) и Δα(R), определить значения их аргументов: из первой функции - дистанции по гипотезам "цель - подводный объект" (RПО) и "цель - надводный объект" (RHО); из второй функции - дистанцию RΔα, не зависящую от класса цели. Тогда в качестве класса цели может быть выбран тот класс, для которого оценки дистанции, рассчитанные на основе измеренных значений уровня сигнала и ширины отметки, более близки друг к другу, т.е.

Дистанция до цели может быть вычислена путем осреднения значений дистанции, рассчитанных исходя из предположения о том, что класс цели - «подводный объект» или класс цели - «надводный объект»:
Рассмотрим характерный конкретный случай:
1) гидроакустические условия соответствуют сплошной акустической освещенности в мелком море (а=0, b=0.036, с=1.5);
2) горизонтальный эффективный размер приемной антенны L, равный 3 м;
3) рабочий диапазон частот от 4 кГц до 8 кГц, ƒH=4 кГц, ƒВ=8 кГц;
На фиг. 2 и 3 для названных условий в зависимости от дистанции до цели представлены:
- уровни сигнала «подводный объект» и «надводный объект» (фиг. 2), посчитанные для приведенных шумностей подводного объекта и надводного объекта 60 и 100 дБ, соответственно, и при условии, что частотная зависимость передаточной характеристики линейной части приемного тракта ШПС одинакова для всех частот и равна единице;
- ширина отметки цели (фиг. 3).
Рассмотрим пример расчета, когда на дистанции 20 км обнаружен подводный объект с приведенной шумностью 62 дБ. Измеряя (с ошибками) параметры ее отметки, получим: измеренное значение уровня сигнала от цели, равное -65 дБ и измеренное значение ширины отметки цели, равное 5,3°. По графику на фиг. 2 по измеренному значению уровня сигнала определяем дистанции по гипотезе "цель - подводный объект" RПО=22 км и по гипотезе "цель - надводный объект" RHО=83 км. По графику на фиг. 3 по ширине отметки
цели определяем дистанцию до цели R=19 км, не зависящую от ее класса.
Сравнивая дистанцию до цели R, полученную по ширине отметки, с дистанциями, полученными по уровню сигнала по двум гипотезам, видим, что она близка к дистанции по гипотезе "цель - подводный объект". Принимается решение, что цель - подводный объект.
Вычисляем дистанцию до подводного объекта: R=(19+22)/2=20,5 км. Таким образом, обеспечивается одновременное определение класса цели и дистанции до нее и достигается заявленный технический результат.
Источники информации:
1. Справочник штурмана. Под ред. В.Д. Шандабылова // М.: Воениздат, 1968.
2. Урик Р.Дж. Основы гидроакустики. // Л.: Судостроение, 1978.
3. Бурдик B.C. Анализ гидроакустических систем / Пер. с англ. // Л.: Судостроение, 1988.
4. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. // СПб.: Наука, 2004.
5. Малышкин Г.С.Оптимальные и адаптивные методы обработки гидроакустических сигналов. Т. 1. Оптимальные методы. // ОАО "Концерн "ЦНИИ "Электроприбор", 2009.
6. Телятников В.И. Методы и устройства классификации гидроакустических сигналов // Зарубежная радиоэлектроника, 1979, №9, с. 19-38.
7. Телятников В.И. Методы и устройства для определения местоположения источника звука. // Зарубежная радиоэлектроника, 1978, №4. С. 66-86.
8. Carter G.С. Passive Ranging Errors due to Receiving Hydrophone Position Uncertainty // JASA, 1979. Vol. 65, №2. P. 528-530. Hassab I.C., Boucher R.E. Passive Ranging Estimation from an Array of Sensors // Journal of Sound and Vibration, 1979. Vol. 67, №2. P. 289-292.
9. Hassab I.C. Contact Localization and Motion Analysis in the Ocean Environment: a Perspective // IEEE Journal of Oceanic Engineering, 1983. Vol. OE-8, №3. P. 136-147.
10. Исак В.А. Измерение дистанции пассивными методами // Морской сборник, 1987. №5. С. 68-70.
11. Картер Дж.К. Обработка сигналов в пассивной гидролокации. В кн. Подводная акустика и обработка сигналов. // М.: Мир, 1985. С. 415-421.
12. Quazi А.Н. An Overview on the Time-Delay Estimate in Active and Passive Systems for Target Localization // IEEE Transactions on ASSP, 1987. Vol. 9, №3. P. 527-533.
13. Патент РФ №2128848
14. Blackman S., Popoli R. Design and analyses of modern tracking systems. - Artech House, 1999. 1230 p.
15. Гампер Л.Е. О точности методов пассивной гидролокации с разнесенными бортовыми антеннами // Научно-технич. сборник "Гидроакустика", 2009, вып. 9, с. 34-42.
16. Подводная акустика и обработка сигналов /под редакцией Л. Бъерне. // М.: Мир, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
| Способ определения дистанции до надводного корабля в условиях дальних зон акустической освещённости | 2022 |
|
RU2782619C1 |
| Способ определения координат морской шумящей цели | 2019 |
|
RU2724962C1 |
| Способ определения класса шумящего морского объекта | 2021 |
|
RU2760912C1 |
| Способ классификации морских объектов по уровню шума в источнике | 2021 |
|
RU2767001C1 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| Способ определения глубины морского объекта с использованием шумопеленгаторной станции с донной линейной многоэлементной антенной | 2024 |
|
RU2838637C1 |
| Способ определения класса шумящей цели | 2018 |
|
RU2685419C1 |
| Способ обнаружения, классификации и определения координат и параметров движения морской шумящей цели | 2018 |
|
RU2692839C1 |

Изобретение относится к области гидроакустики, а именно к пассивным шумопеленгаторным станциям, предназначенным для обнаружения подводных объектов и надводных объектов по их шумоизлучению. Технический результат - повышение достоверности классификации и точности определения дистанции шумящей цели. Технический результат достигается тем, что решение о классе цели и дистанции до нее принимается с использованием измеренных значений уровня сигнала от цели и ширины отметки цели, обнаруженной на выходе веера характеристик направленности приемной гидроакустической антенны. 2 з.п. ф-лы, 3 ил.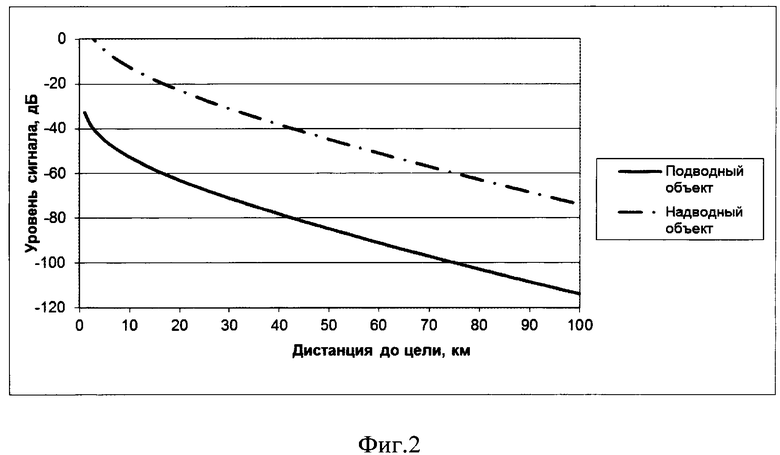
1. Способ определения класса шумящей цели и дистанции до нее, включающий формирование пеленгационного рельефа на выходе горизонтального веера характеристик направленности приемной гидроакустической антенны, обнаружение в пеленгационном рельефе методом двухстороннего контраста отметки цели, отличающийся тем, что с использованием пеленгационного рельефа измеряют уровень сигнала от цели и ширину отметки обнаруженной цели и с учетом полученных измерений принимают решение о классе цели и дистанции до нее.
2. Способ по п. 1, отличающийся тем, что при классификации обнаруженной цели на классы "подводный объект - надводный объект" рассчитывают зависимости от дистанции уровня сигнала каждого из двух рассматриваемых классов цели, с использованием этих зависимостей и измеренного уровня сигнала от цели определяют дистанции до цели по гипотезам "цель - подводный объект" и "цель - надводный объект", рассчитывают зависимость от дистанции ширины отметки цели безотносительно класса цели, с ее использованием и измеренной ширины отметки определяют дистанцию до цели, относят цель к тому классу, для которого дистанция, определенная по его гипотезе с использованием уровня сигнала от цели, сопоставима с дистанцией, определенной по ширине отметки цели, дистанцию до цели определяют как среднее арифметическое сопоставимых дистанций.
3. Способ по п. 2, отличающийся тем, что зависимость ширины отметки цели от дистанции и зависимость уровня сигнала цели от дистанции по гипотезам "цель - подводный объект" и "цель - надводный объект" рассчитываются для текущих гидроакустических условий, а также для приведенных шумностей, характерных для каждого из рассматриваемых классов цели.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ (ПЕЛЕНГА И ДИСТАНЦИИ) И ПАРАМЕТРОВ ДВИЖЕНИЯ (КУРСА И СКОРОСТИ) МОРСКОЙ ШУМЯЩЕЙ ЦЕЛИ | 2017 |
|
RU2649887C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| US 5646907 A1, 08.07.1997 | |||
| Г.Л | |||
| Поляк | |||
| ОПРЕДЕЛЕНИЕ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ПРИ МАНЕВРИРОВАНИИ ЦЕЛИ ИЛИ ПРЕСЛЕДОВАТЕЛЯ | |||
| ВЕСТНИК ВГУ | |||
| СЕРИЯ: ФИЗИКА | |||
| МАТЕМАТИКА | |||
| ВОРОНЕЖ, 2016, номер 2, стр | |||
| Прибор для определения всасывающей силы почвы | 1921 |
|
SU138A1 |

