Заявляемый объект относится к области пассивной гидролокации и может быть использован, например, при создании системы мониторинга обстановки в охраняемой морской экономический зоне.
Как правило, комплекс задач, решаемых в известных гидроакустических пассивных системах мониторинга, включает только обнаружение сигналов шумоизлучения (ШИ) морских целей (т.е. обнаружение отметок) и измерение их пеленгов с использованием одиночных шумопеленгаторных станций. Современные гидроакустические пассивные системы мониторинга функционирующие в условиях «мелкого моря» имеют в своем составе антенны большого пространственного размера и осуществляют обнаружение шумящих объектов в зоне Френеля антенны. Основу описанных в известных источниках способов обнаружения сигналов шумоизлучения морских объектов (см., например, Колесникова И.К., Румынская И.А. Основы гидроакустики и гидроакустические станции. - Л.: Судостроение, 1970, - С. 250-255; Простаков А.Л. Электронный ключ к океану. - Л.: Судостроение, 1978. - С. 21-23; Гусев В.Г. Системы пространственно-временной обработки гидроакустической информации. - Л. Судостроение, 1988. - С. 47-51; Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Л.: Судостроение, 1981. - С. 69-78, а также способы обнаружения сигналов шумоизлучения морских объектов по патентам РФ №2145426, 2316791 и 2373553) составляет совокупность операций,, обеспечивающих прием сигналов на фоне помех, измерение мощности предполагаемого (т.е. обнаруживаемого) сигнала в каждом направлении наблюдения и принятии решения об обнаружении отметок целей при превышении порога соответствующими результатами измерения мощности. Как отмечено выше, при обнаружении каждой отметки в известных аналогах реализуется измерение направления прихода соответствующего ей сигнала, т.е. ее пеленгование. Последняя операция описана, например, в цитированной выше книге Колесниковой И.К. и Румынской И.А. (см. с. 227…236).
Задача определения направления на морские объекты и дистанции до них по излученным ими шумовым гидроакустическим сигналам в условиях мелкого моря осложнена тем, что в низкочастотной области (до 200 Гц) имеется многомодовый характер распространения гидроакустических сигналов. Для снижения ошибок оценивания пеленга и дистанции требуется применять согласованную со средой обработку (см., например, Баронкин В.М. «Статистические методы анализа звуковых полей в океане» в кн. «Акустика океанической среды», М. «Наука» 1989, 186-202). Для построения согласованной обработки необходимо знать амплитудную и фазовую характеристики мод, для определения параметров мод в районе установки антенн шумопеленгаторных станций необходимо проводить специально организованные калибровочные работы, что не всегда возможно. Предлагаемый способ позволяет без проведения калибровочных работ провести согласование приемного тракта к условиям многомодового распространения гидроакустических сигналов.
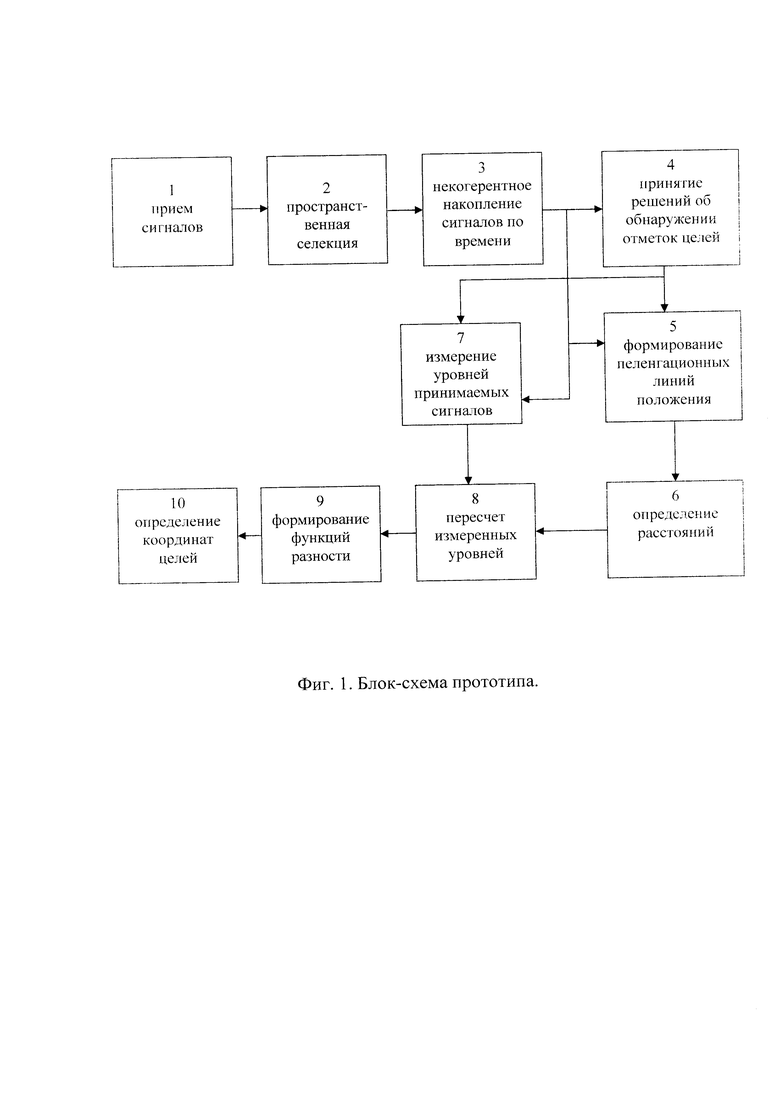
Наиболее близким по технической сущности к заявляемому объекту является способ обнаружения шумящих объектов, входящий в состав объекта по патенту РФ No 2526896 на «Способ определения местоположения объектов в пассивной системе мониторинга» (прототип). Ниже приводится сравнительно подробное описание прототипа до операции 5 включительно, далее приводятся операции, входящие в заявляемый объект Блок-схема прототипа представлена на фиг.1, где обозначены:
1 - прием сигналов (не менее чем) двумя приемными позициями;
2 - пространственная селекция;
3 - некогерентное накопление сигналов по времени;
4 - принятие решений об обнаружении отметок целей;
5 - формирование пеленгационных линий положения;
6 - определение расстояний между каждой из двух приемных позиций системы и точками пересечения пеленгационных линий положения;
7 - измерение уровней принимаемых сигналов, соответствующих обнаруженным отметкам;
8 - пересчет измеренных уровней к точкам пересечения пеленгационных линий положения;
9 - формирование функций разности результатов пересчета уровней сигналов;
10 - определение координат целей.
Недостатком прототипа является то, что для получения оценок дистанции до шумящего объекта необходимо использование более одной приемной позиции и в случае наличия в зоне обзора нескольких шумящих объектов возникает необходимость в проведении идентификации отметок. Предлагаемый способ позволяет выполнить оценку пеленга и дистанции до шумящего объекта в условиях многомодового распространения сигналов с одной приемной позиции за счет использования фокусировки с учетом кривизны фронта волны (см. например Евтютов А.П., Митько В.Б. «Инженерные расчеты в гидроакустике», Л.: Судостроение, 1988. - С. 25), при этом отпадает необходимость в проведении идентификации целей.
Далее приводится описание прототипа. Отличие заявляемого объекта от прототипа заключается в использовании только одной приемной позиции.
Операция 1 (прием сигналов двумя (для прототипа) одной (для заявляемого объекта) приемными позициями) предусматривает преобразование акустических сигналов в каждой приемной позиции в электрические. В каждой из приемных позиций она реализуется, например, так же, как в объекте по патенту РФ №2316791, а именно гидроакустической антенной решеткой, содержащей, в частности, совокупность из N гидрофонов. См. также, например, А.П. Евтютов, В.Б. Митько. Примеры инженерных расчетов в гидроакустике. Л. Судостроение, 1981, с. 116, рис. 1.8).
Операция 2 (пространственная селекция) реализуется посредством формирования в приемной позиции веера приемных характеристик направленности (пространственных каналов обработки). Операция пространственной селекции показана на рис. 1.8. с. 15 (позиции 1 и 2) в «Справочнике по гидроакустике» А.В. Евтютова и др. Л. Судостроение. 1982. Блок-схема устройства формирования веера приемных характеристик направленности приведена в цитированном «Справочнике …» на рис. 1.10, с. 16. В итоге выполнения операции 2 в приемной позиции сформированы, например, временные реализации сигналов, соответствующих каждому пространственному каналу обработки. Совокупность выходов устройства, реализующего данную операцию (она показана на рис. 1.10 цитированного «Справочника …»), подключена к входам показанных на этом рисунке блоков фильтров 4; строго говоря, сигналы с отводов линий задержки (позиция 3 на рис. 1.10) передаются на входы фильтров 4 не непосредственно, а через сумматоры (на рис. 1.10. сумматоры не показаны; они заменены на этом рисунке сплошными и пунктирными прямыми линями, пересекающими совокупность регистров сдвига). На выходе каждого из упомянутых сумматоров формируется сигнал, соответствующий одному из пространственных каналов обработки.
Операция 3 (некогерентное накопление сигналов по времени) показана в цитированном «Справочнике …» на рис. 1.8 (позиции 3, 4 и 5) как совокупность операций полосовой фильтрации, детектирования и осреднения по времени, реализуемых в каждом пространственном канале обработки в приемной позиции.
Операция 4 (принятие решений об обнаружении отметок целей) в приемной позиции реализуется, например, аналогично объектам, описанным в цитированной выше книге Колесниковой И.К., Румынской И.А. Основы гидроакустики и гидроакустические станции. - Л.: Судостроение, 1970, - С. 250-255, упомянутым выше объектам по патентам РФ №2145426, 2316791 и 2373553, а также книге Тюрина A.M. и др. Основы гидроакустики. - Л.: Судостроение, 1966, - С. 191-209, и предусматривает принятие решения об обнаружении отметок цели (или целей) при превышении порога соответствующими результатами выполнения операции некогерентного накопления сигналов по времени.
Операция 5 (формирование пеленгационной линии положения, т.е. определение углов между, например, осью начала отсчета пеленгов, ориентированной в направлении на Север, и направлением на отметку) реализуется согласно цитированной выше книге И.К. Колесниковой и И.А. Румынской (см. с. 227…236), или книге Э.Ф. Свиридова «Сравнительная эффективность моноимпульсных радиолокационных систем пеленгации». Л. Судостроение, 1964. Например, в варианте фазового пеленгования эта операция реализуется посредством измерения разности фаз сигналов, сформированных по двум половинам приемной антенны; возможен и вариант реализации операции пеленгования, приведенный в описании объекта по патенту РФ №2316791 (в описании данного изобретения это операция 3). В результате выполнения данной операции формируются пеленгационные линии положения, каждая из которых характеризуется параметром θq q - номер отметки, по которой сформирована пеленгационная линия положения в приемной позиции. Указанный угол θq, как отмечено выше, есть угол между упомянутой осью начала отсчета пеленгов и направлением из приемной позиции на q-ю отметку; каждый из указанных углов отсчитывается от упомянутой оси по часовой стрелке.
Операция 5 может выполняться над данными в тех пространственных каналах обработки (характеристиках направленности), в которых обнаружены отметки, и с учетом углов ориентации соответствующих этим канатам характеристик направленности. Этому соответствует показанная на фиг. 1 связь между операциями 4 и 5.
Данная операция 5 в вариантах классического, например амплитудного моноимпульсного пеленгования, выполняется над результатами выполнения операции 2 (этот вариант связи между операциями 2 и 5 на фиг. 1, а также и фиг. 2 не показан), а в случае ее выполнения на основе соотношения уровней результатов некогерентного накопления сигналов по времени (как это описано, например, в книге «Применение цифровой обработки сигналов» под ред. Э. Оппенгейма. М. Мир, 1980, с. 325 или в описании объекта по патенту РФ №2316791 на «Способ обнаружения сигналов шумоизлучения морских объектов) - над результатами выполнения операции 3; в последнем случае указанные уровни результатов некогерентного накопления сигналов по времени, вырабатываемые при выполнении операции 3, либо передаются на вход операции 5 по показанной на фиг. 1 (а также фиг. 2) связи, либо транслируются операцией 4 на вход операции 5. Указанные варианты реализации операции формирование пеленгационных линий положения (над результатами выполнения операции либо 2, либо 3) между собой эквивалентны.
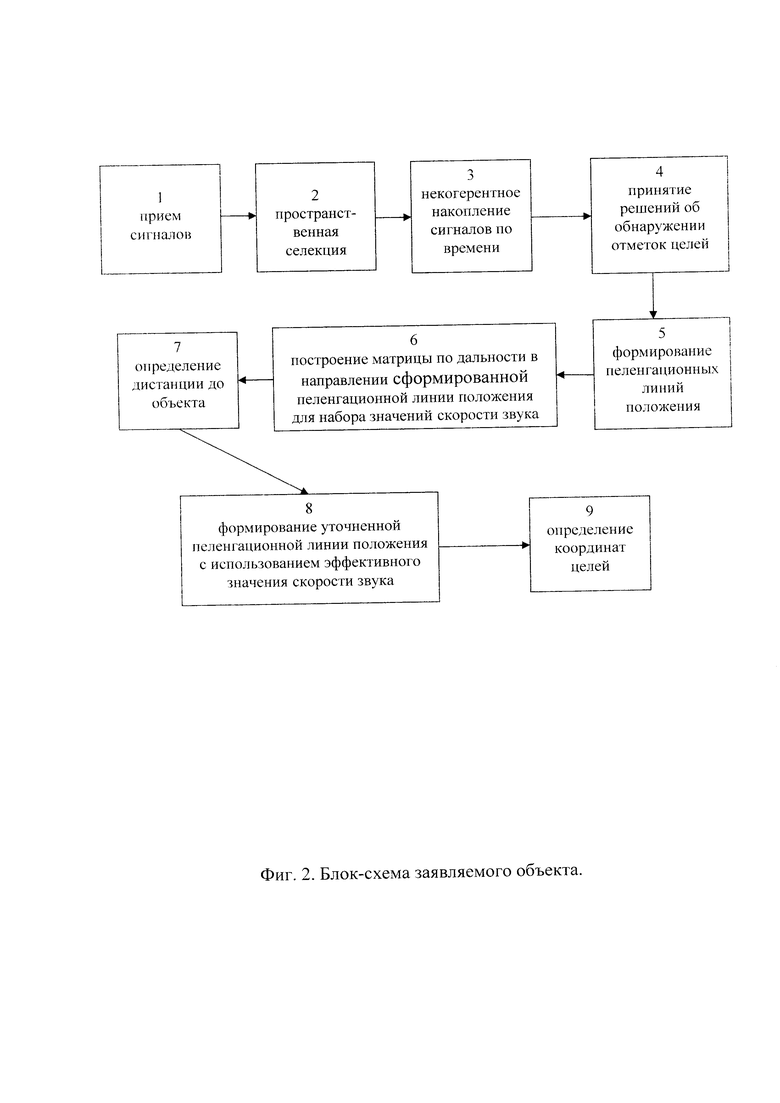
Блок-схема заявляемого объекта представлена на фиг. 2. Операции 1…5 блок-схемы на фиг. 2 по своим названиям, выполняемым функциям и взаимодействию между собой совпадают с операциями прототипа, фигурирующими под соответствующими номерами 1-5 на блок-схеме фиг. 1. за исключением того, что прототип использует две приемные позиции, а заявляемый объект - одну. Новые в сравнении с прототипом операции на фиг. 2 обозначены:
6 - построение матрицы по дальностям фокусировки в направлении сформированных пеленгационных линий положения для набора значений скорости звука;
7 - определение дистанции до объекта;
8 - формирование уточненной пеленгационной линии положения с использованием эффективного значения скорости звука;
9 - определение координат шумящего объекта.
Операция 6 (построение матрицы по дальности в направлении сформированных пеленгационных линий положения для набора значений скорости звука) реализуется следующим образом. В направлении сформированных пеленгационных линий положения проводится формирование характеристик направленности для различных дальностей фокусировки с учетом кривизны фронта волны (см. например Евтютов А.П., Митько В.Б. «Инженерные расчеты в гидроакустике», Л.: Судостроение, 1988. - С. 25). Для каждого значения дальности Ri фокусировка производится для набора значений скорости звука - Cj(ƒ). Строится матрица значений величины отклика антенны G(ƒ,θq,Ri,Cj) (формула 1) для I значений дальности фокусировки с шагом ΔR и j значений скорости звука с шагом ΔС.
где: Хk(ƒ) - вектор входного сигнала на частоте ƒ для антенны, состоящей из N приемников;
θq - направление сформированных пеленгационных линий положения;
хn, уn - координаты n-го гидрофона на декартовой плоскости;
Cj(ƒ) - значения скорости звука, для которых производится формирование характеристики направленности антенны приемной позиции, лежащие в диапазоне от Снач. до Скон., I=(Скон.-Снач.)/ΔС.
Операция 7 (определение дистанции до объекта). В матрице определяется номер строки и столбца максимального элемента Mmaxi, Mmaxj (значение близко к единице). По номеру строки определяется расстояние до источника шумоизлучения Rиш=ΔR⋅Mmaxi, по номеру столбца определяется эффективное значение скорости звука Сэф(ƒ)=Cнач.+ΔC⋅Mmaxj, наилучшим образом подходящее для формирования характеристики направленности в данных гидролого-акустических условиях, при данных взаимных расположениях антенны приемной позиции и источника шумоизлучения (в смысле максимального значения отношения сигнал/помеха на выходе пассивной системы мониторинга).
Операция 8 (формирование уточненной пеленгационной линии положения с использованием эффективного значения скорости звука). Вычисляется столбец матрицы G(ƒ,θq) (формула 2) для определенных в операции 7 эффективного значения скорости звука Сэф и расстояния до источника шумоизлучения Rиш.:
Указанная процедура убирает смещение оценки пеленга на шумящий источник, достигающее иногда 20°-40°, как указывается в статье В.Н. Кравченко, А.В. Гринюк «О возможности согласованной с гидроакустическим волноводом обработки сигналов в мелком море» (Труды XIII всероссийской конференции «Прикладные технологии гидроакустики и гидрофизики». С. 89. СПб. 2016.
Операция 9 (определение координат шумящего объекта). Определяются координаты шумящего объекта в полярных координатах по известному углу пеленгационной линии положения шумящего объекта и дистанции до него.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ ГИДРОАКУСТИЧЕСКОЙ ПАССИВНОЙ СИСТЕМОЙ МОНИТОРИНГА | 2016 |
|
RU2655642C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ В ПАССИВНОЙ СИСТЕМЕ МОНИТОРИНГА | 2013 |
|
RU2526896C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681526C1 |
| Способ определения класса шумящей цели и дистанции до неё | 2018 |
|
RU2681432C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2015 |
|
RU2602732C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ШУМЯЩИХ МОРСКИХ ОБЪЕКТОВ | 2022 |
|
RU2810106C2 |
Заявляемый объект относится к области пассивной локации (в частности, гидролокации) и может быть использован, например, при создании системы мониторинга обстановки в охраняемой морской экономической зоне. Целью заявляемого технического решения является обеспечение определения координат, обнаруженных одной приемной позицией. Заявляемый способ предусматривает прием сигналов аппаратурой одной приемной позиции, пространственную селекцию по принятым сигналам, некогерентное накопление по времени результатов пространственной селекции, принятие решений об обнаружении отметок от целей по результатам накопления по времени, формирование по результатам обнаружения каждой отметки пеленгационных линий положения, построение матрицы значений величины отклика антенны, распределенных по дальностям фокусировки в направлении сформированных пеленгационных линий положения для набора значений скорости звука, выбор из матрицы наибольшего значения величины отклика антенны, определение дистанции фокусировки и эффективной скорости звука, соответствующих данному значению, по найденной эффективной скорости звука определяется уточненная пеленгационная линия положения, по дистанции фокусировки и пеленгационной линии положения определяются координаты шумящего объекта. 2 ил.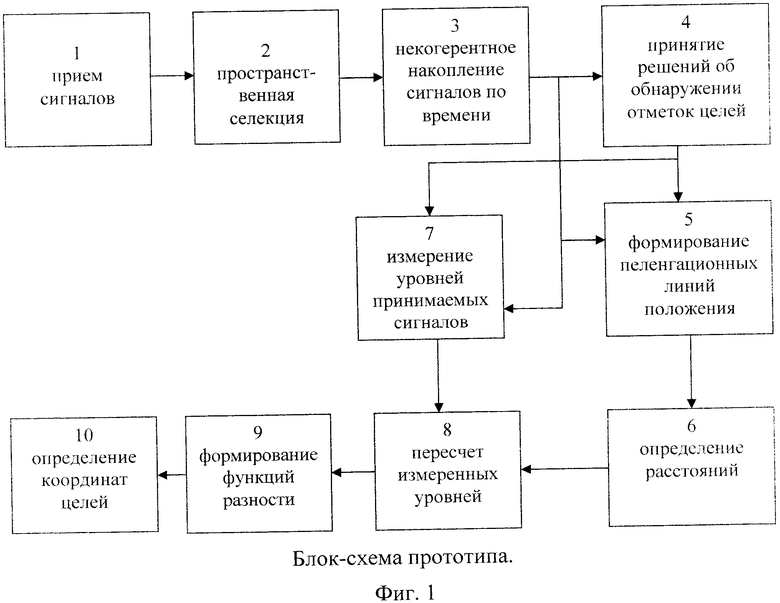
Способ обнаружения шумящих объектов гидроакустической пассивной системой мониторинга, заключающийся в приеме сигналов аппаратурой приемной позиции, отличающийся тем, что прием сигнала ведется на одну приемную позицию, пространственная селекция по принятым сигналам в приемной позиции, некогерентное накопление по времени результата пространственной селекции, принятие решений об обнаружении отметок от целей по результатам накопления по времени, формирование по результатам обнаружения каждой отметки пеленгационных линий положения, построение матрицы значений величины отклика антенны, распределенных по дальностям фокусировки в направлении сформированных пеленгационных линий положения для набора значений скорости звука, выбор из матрицы наибольшего значения величины отклика антенны, определение дистанции фокусировки и эффективной скорости звука, соответствующих наибольшему значению величины отклика антенны, определение уточненной пеленгационной линии положения по найденной из матрицы эффективной скорости звука, определение координат шумящего объекта по дистанции фокусировки и уточненной пеленгационной линии положения.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ В ПАССИВНОЙ СИСТЕМЕ МОНИТОРИНГА | 2013 |
|
RU2526896C1 |
| ПАССИВНО-АКТИВНЫЙ АКУСТИЧЕСКИЙ МЕТОД ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ УТЕЧЕК ГАЗА В ГАЗОЖИДКОСТНОЙ СРЕДЕ | 2015 |
|
RU2584721C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА НА ШУМЯЩИЙ ОБЪЕКТ | 2010 |
|
RU2444747C1 |
| US 3835448 A1, 10.09.1974. | |||

