Предлагаемая группа изобретений относится к неразрушающим методам исследования твердых материалов и может быть использовано для контроля свойств, внутренних структур и возможных дефектов твердых материалов, в том числе биологических объектов.
Ультразвуковой контроль, представляющий с метод обнаружения неоднородностей объекта путем направления высокочастотного звукового пучка на исследуемый объект и приема отраженных от него и его внутренних неоднородностей волн позволяет визуализировать внутреннее строение исследуемого объекта. Данный метод позволяет обнаружить как поверхностные, так и внутренние дефекты в металлах, пластиках, композитных материалах или в биологических объектах которые слишком малы, чтобы их можно было обнаружить другими способами.
Для твердых неоднородных материалов наиболее предпочтительным является использование мощных ультразвуковых импульсов, генерируемых с помощью лазерного излучения в контакте с исследуемым объектом. Основными преимуществами контактного лазерного ультразвука перед другими методами генерации состоит в том, что звуковой сигнал является коротким, широкополосным и апериодическим, не имеющим боковых лепестков. Это обеспечивает высокое продольное разрешение, высокую чувствительность измерений. В случае, когда генерация и прием лазерного ультразвука разделены, нет проблемы возникновения "мертвой зоны", характерной для ультразвука, генерируемого и регистрируемого пьезоэлектрическими преобразователями. (Гусев В.Э., Карабутов А.А. Лазерная оптоакустика. - М: Наука, 1991. - С. 304. - ISBN 5-02-14172-0.) Однако для биологических объектов контактный метод передачи ультразвуковых импульсов нежелателен.
В случае исследования объектов, имеющих сложную неоднородную структуру, предпочтительнее использовать мощные ультразвуковые импульсы, генерируемые с помощью лазерного излучения и взаимно-корреляционное сравнение отраженного сигнала, с сигналом сравнения используя быстрое преобразование Фурье. Это позволяет получать двумерную картину внутреннего строения исследуемого объекта и при наличии предварительной тарировки получить картину, отображающую внутреннюю структуру исследуемого объекта, например, мягких биологических тканей, с высокой разрешающей способностью.
Примером подобного технического решения может служить Ультразвуковой томограф (Патент РФ 2526424, опубликовано: 20.08.2014 г., Бюл. №23), в котором рабочая поверхность плоских электроакустических преобразователей расположена в касательной плоскости к окружности, внутри которой находится томографируемый орган, и ортогонально плоскости этой окружности. Недостатком данного технического решения является то, что плоские электроакустические преобразователи не позволяют получить мощные ультразвуковые импульсы и сфокусировать их на заданной точке исследуемого объекта.
Известна так же Система для количественной томографии, (WO 2019195614 (А1) - 2019-10-10) содержащая лазер, выполненный с возможностью испускать мгновенные импульсы, волоконно-оптический пучок, одну ультразвуковую матрицу ультразвуковых преобразователей, сконфигурированную для передачи ультразвуковых импульсов в область ткани и для обнаружения ультразвуковых сигналов, отраженных или передаваемых через область ткани, в которой оптоакустическая матрица ультразвуковых преобразователей сверх широких размеров и ультразвуковая матрица ультразвуковых преобразователей объединены в одну матрицу дугообразной формы.
Данная система позволяют получить мощные ультразвуковые импульсы, но не дает возможность сфокусировать их на заданной точке исследуемого объекта, так как ширина излучателя определяет ширину исследуемой области (А. Ораевский, А. Карабутов, Предельная чувствительность оптико-акустического детектирования с временным разрешением, Учеб-SPIE, 3916 (2000) 228-239.https://doi.org/10.1117/12.386326.). Недостатком данного технического решения является то, что предлагаемая конструкция матрицы снижает точность получаемого изображения.
Известен «Лазерный компонент, лазерно-генерирующий аппарат и оптическая когерентная томография» (CN 107661088 (A) приоритет от 06.02.2018.), при котором оптико-акустический импульс от излучателя/приемника передается на зеркало отражатель и концентрируется в одной точке. Этот способ позволяет получить мощные ультразвуковые импульсы и легко регулировать их параметры в зависимости от объекта исследования. Недостатком данного технического решения является то, что устройство для его осуществления фокусирует их на заданной точке исследуемого объекта в виде полосы, что не дает достаточной точности, а наличие в его составе дополнительного элемента в виде зеркала снижает эффективность сигнала и требует увеличения мощности излучателя.
В качестве прототипа авторами рассматривается "Способ относительного возбуждения для системы ультразвуковой томографии" (CN 109655525 (А) приоритет от 19.04.2019.), включающий множество последовательно возбуждаемых пьезоэлектрических ультразвуковых датчиков равномерно распределенных по боковой стенке металлической трубы по окружности, одни из которых являются излучателями, а другие приемниками, причем их число не менее 16, при этом объект исследования помещается в центр данной трубы, которая в свою очередь заполнена иммерсионной жидкостью. Данный способ за счет большого количества излучателей и приемников позволяет сфокусировать оптико-акустический импульс в одной точке и получить отраженную волну с минимумом искажений.
Недостатком вышеуказанного технического решения является то, что точность исследования образцов зависит от линейных размеров излучателей, а так же то, что фокусировка согласно данному методу происходит строго в центре используемого для осуществления метода устройства, то перемещения объекта исследования и его позиционирование затруднительны, а при исследовании объектов значительного размера особенно. Кроме того затруднен так же контроль операций, проводимых на биологических объектах, например, визуализация иглы для акупунктуры, вводимой в ткань на заданную глубину. Данное техническое решение рассматривается авторами в качестве прототипа.
Технический результат предлагаемого изобретения состоит в повышение точности системы визуализации работающей в режиме реального времени, а также, в создании устройства, позволяющего на основе использования предлагаемого способа исследовать различные объекты произвольной формы, включая биологические.
Технический результат достигается за счет того, что генерируют оптический импульс импульсно-периодическим лазером, передают его через оптическую систему и далее преобразуют его в акустический сигнал с помощью распределенного оптико-акустического преобразователя криволинейной формы, излучают этот сигнал в исследуемый объект, который помещен в иммерсионную среду и принимают отраженный акустический сигнал решеткой пьезоэлементов, усиливают принятый сигнал, преобразовывают его из аналоговой в цифровую форму, и осуществляют построение модели внутренней структуры исследуемого объекта, при этом излучаемый в исследуемый объект акустический сигнал фокусируется не на его поверхности, а на некоторой глубине внутри него, определяемой расстоянием между двумя фокусами Гаусовых пучков соответствующих волнам в плоскостях XY, которые характеризуют положение распределенного оптико-акустического преобразователя криволинейной формы и решетки пьезоэлементов, и которое в свою очередь является рабочей зоной анализа отраженного от внутренней структуры исследуемого объекта акустического сигнала, так же перемещение исследуемого объекта или оптико-акустического преобразователя криволинейной формы, и их позиционирование производят дискретно после завершения цикла излучения акустического сигнала - прием отраженного акустического сигнала, с таким расчетом, чтобы рабочая зона акустического сигнала всегда оставалась внутри исследуемого объекта, причем для построения 2D модели отдельного слоя исследуемого объекта используется алгоритм обратных проекций и алгоритм учета преломления акустического сигнала на его поверхности.
Технический результат так же достигается за счет того, что синхронизация между лазерными импульсами и тактовым генератором, управляющим работой аналого-цифрового преобразователя реализована путем сдвига сигнала по времени с помощью фазовой Фурье-фильтрации.
Технический результат достигается за счет того, что глубина фокусировки акустического сигнала определяется размерами исследуемого объекта, а минимальная толщина слоя сканирования составляет 100 мкм.
Для осуществления заявляемого в предлагаемом способе технического результата предлагается устройство. Для его достижения устройство содержащее импульсно-модулированный лазер, оптическую систему, распределенный оптико-акустический преобразователь, решетку пьезоэлементов, образующую с оптико-акустическим преобразователем единый блок криволинейной формы, помещенный в емкость с иммерсионной жидкостью, а так же многоканальный усилитель с многоканальным аналого-цифровым преобразователем, компьютер и соединяющие их элементы, оптико-акустическому преобразователю и решетке пьезоэлементов, образующим вместе единый блок, придают тороидальную форму с апертурой в диапазоне от 90 до 180 градусов и количество приемных элементов которого равно или больше количества излучающих элементов и при этом кратным восьми, а так же за счет того, что положение оптико-акустического преобразователя и решетки пьезоэлементов совпадают в системе координат характеризующих их форму и размеры.
Кроме того технический результат устройства достигается за счет того, что единый блок криволинейной формы состоит из чередующихся полос излучателей и приемников параллельных друг другу и не соприкасающихся между собой, которые в свою очередь зафиксированы расположенной на жестком массивном основании в выемке тороидальной формы повторяющей характеристики заданные для оптико-акустического преобразователя и решетки пьезоэлементов, при этом все полосы излучатели и все полосы приемники соединены между собой соответствующими шинами, которые в свою очередь связаны с многоканальным усилителем и далее с многоканальным аналого-цифровым преобразователем, при этом размеры основы единого блока и радиусы его кривизны определяются, исходя из размеров исследуемых объектов.
Предлагаемые способ и устройство поясняются чертежами, где на Фиг. 1 представлена схема достижения заявляемого технического результата в общем виде, на Фиг. 2 представлена схема образования акустических волн, на Фиг. 3 представлен условный разрез исследуемого объекта и единого блока, на Фиг. 4 показан оптико-акустический преобразователь и решетка пьезоэлементов (единый блок) в развернутом виде, на фиг.5 показаны графики отображающие экспериментальные характеристики области чувствительности и пространственного разрешения предлагаемого устройства.
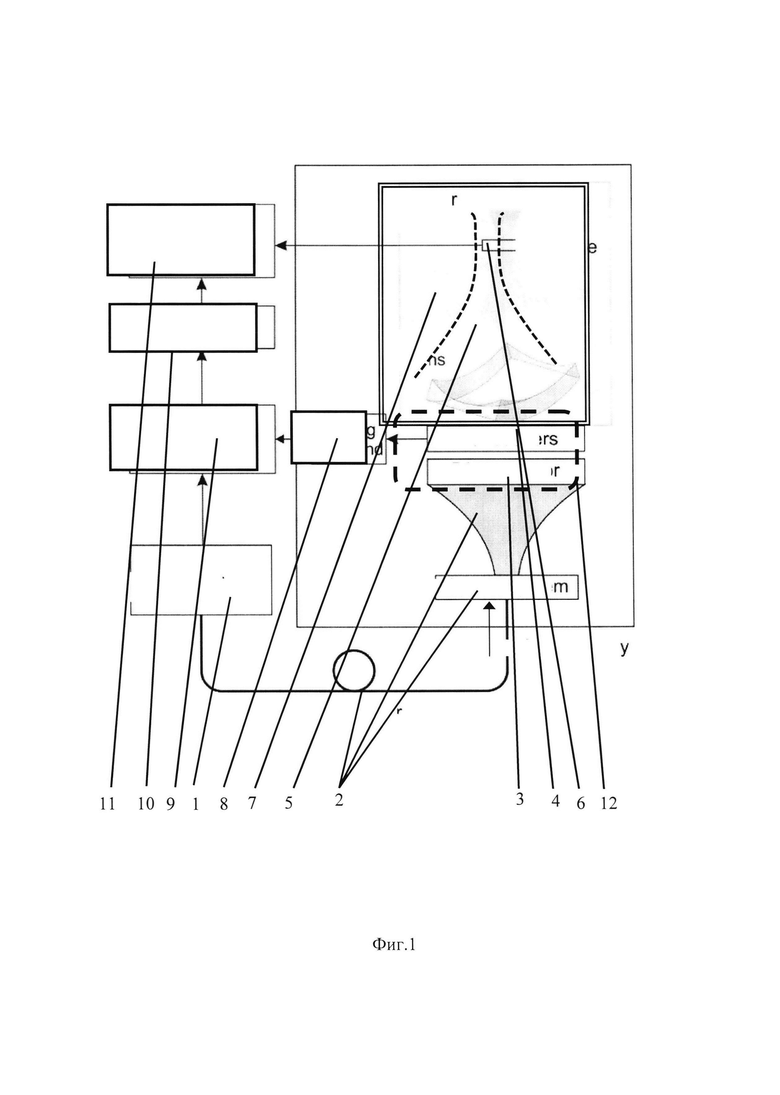
Схема достижения заявляемого технического результата в общем виде показана на фиг. 1. Для этого согласно предлагаемому способу генерируют оптический импульс импульсно-модулированным лазером 1, который передают через оптическую систему 2, преобразуют его в акустический сигнал с помощью фотоакустического преобразователя 3 в виде решетки из пьезоэлементов и принимают отраженное рассеянное акустическое поле широкополосными пьезоэлектрическими преобразователями 4, так же выполненными в виде решетки. При этом оба преобразователя образуют единый блок, рабочая поверхность которого обращенная к исследуемому объекту 5 имеет тороидальную форму. Траектория распространения акустических сигналов 6 обозначена на схеме условно. Принятый широкополосными пьезоэлектрическими преобразователями 4 отраженный акустический сигнал 6 передается на аналоговый многополосный усилитель-преобразователь 8, где происходит его усиление и который передается далее в систему сбора и обработки данных 9. Оцифрованная информация преобразуется компьютером 10 при помощи алгоритма обратных проекций и алгоритма учета преломления акустического сигнала на поверхности исследуемого объекта 5 и выводится в наглядной форме при помощи графического процессора 11. Кроме того компьютер 10 управляет работой аналого-цифрового усилителя-преобразователя 8, путем сдвига принимаемого сигнала по времени с помощью фазовой Фурье-фильтрации.
Согласно предлагаемому способу все перемещения объекта 5 фиксируются в определяемых заранее относительно единого блока 12 координатах и происходят только дискретно после завершения цикла излучение акустического сигнала - прием отраженного акустического сигнала. При этом сначала полностью исследуется один слой заданной области изучаемого объекта 5, а после завершения построения его 2D модели осуществляют переход к следующему слою, минимальная толщина которого составляет 100 мкм.
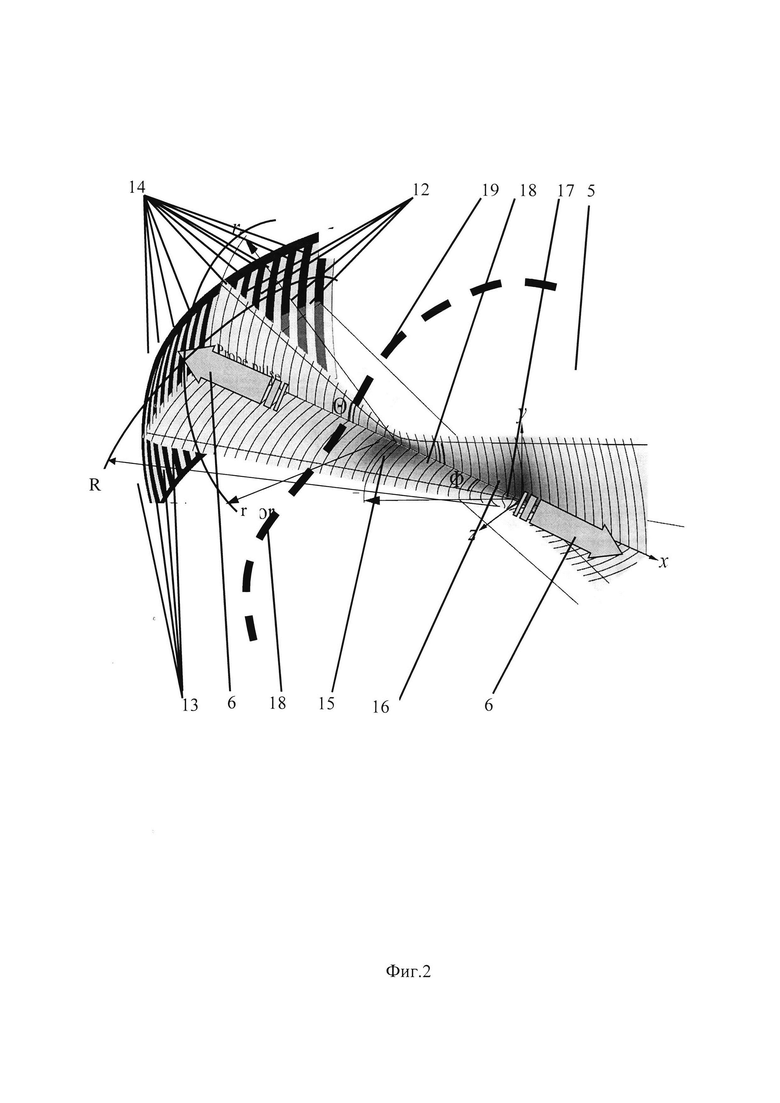
Схема образования акустических волн для достижения заявляемого технического результата показана на фиг. 2. Для этого, согласно предлагаемому способу, форма фотоакустического преобразователя 3 и широкополосного пьезоэлектрического преобразователя 4 полностью совпадают между собой и представляют часть тороида характеризуемую радиусами кривизны в горизонтальной плоскости R и вертикальной плоскости r, а так же их апертурами Ф и Θ. Элементы фотоакустического преобразователя 3 и широкополосного пьезоэлектрического преобразователя 4 имеют вид полос 13 и 14 и последовательно чередуются, количество элементов при этом всегда кратно восьми. Возбуждение акустического сигнала происходит единовременно во всех элементах фотоакустического преобразователя 3. Образуемая при этом акустическая волна 6 имеет форму характеризуемую наличием двух узлов Гаусовых пучков 15 и 16, расстояние между которыми определяется разницей между величинами R и r. Центр пучка 15 принимается за начало системы координат 17 в которой происходит позиционирование объекта исследования 5 так, как положение данной точки относительно единого блока фотоакустического преобразователя 3 и широкополосного пьезоэлектрического преобразователя 4 точно известно. При этом согласно предлагаемому способу возможно перемещение как объекта исследования 5, так и единого блока 12. В этом случае система координат единого блока 12 привязывается к дополнительной системе координат, например, связанной с емкостью, заполняемой иммерсионной жидкостью 7, в которую помещают объект 5.
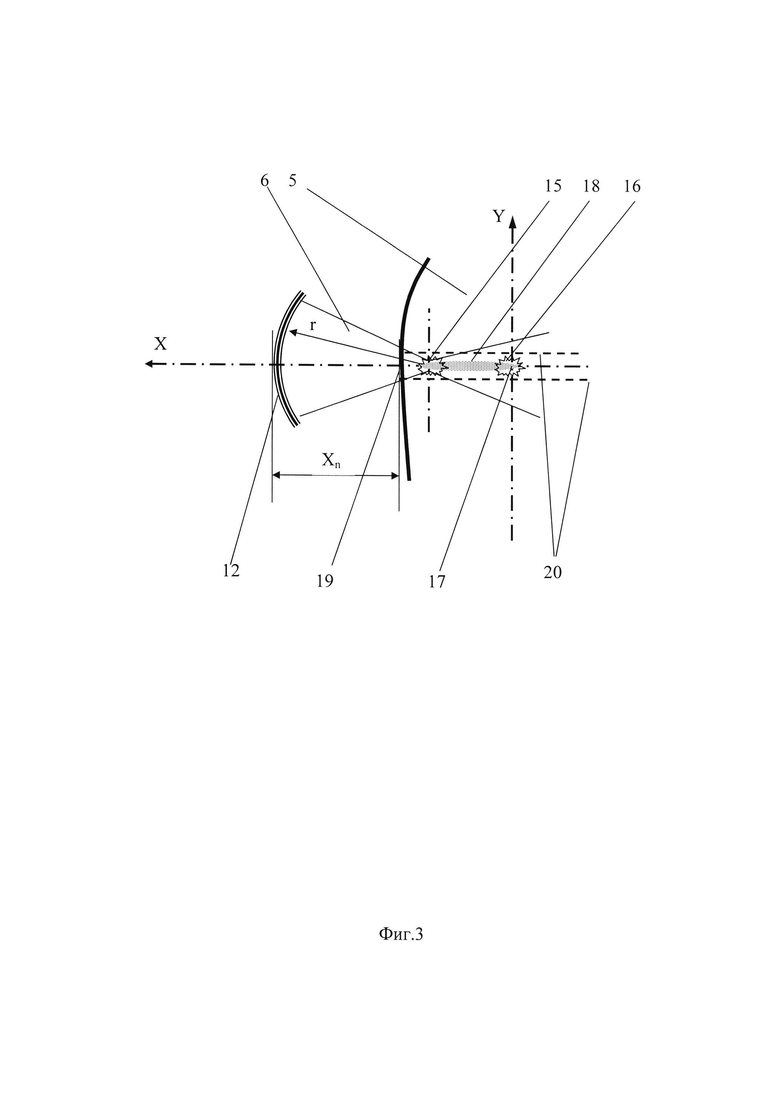
Расстояние между единым блоком 12 и объектом исследования 5 задают так, что бы область 18 волны 6 между двух фокусов Гаусовых пучков 15 и 16 полностью находилась внутри него. На Фиг. 3, где показан условный разрез исследуемого объекта 5 и единого блока 12 состоящего из фотоакустического преобразователя 3 и широкополосного пьезоэлектрического преобразователя 4, данное расстояние показано как хn. Область 18, согласно предлагаемому способу, является рабочей зоной анализа акустического сигнала, которая характеризуется максимальным разрешением и минимальными искажениями при построении картины внутренней структуры объекта исследования. Кроме того перемещения объекта исследования 5, осуществляют с таким расчетом, что бы рабочая область 18 не выходила за границы исследуемого в данный момент слоя объекта исследования 5 обращенного к устройству, граница которого обозначена на Фиг. 2 как 19. Перемещения объекта исследования 5 вдоль оси Y, так же осуществляют, так что бы рабочая область 18 не выходила за границы исследуемого в данный момент слоя объекта исследования 5 и была перпендикулярна данной оси. Данные границы обозначены на Фиг. 3 как 20.
Акустические волны, отраженные от имеющихся внутри объекта исследования 5 дефектов, фиксируются широкополосным пьезоэлектрическим преобразователем 4, а так как форма приемника и излучателя, а так же расстояние от них до исследуемого объекта 5 полностью совпадают, то искажения принятых волн будут минимальны. Применяя подходящие к волнам данного типа алгоритмы, например алгоритм LU FBP, то зная расстояния до объекта и количество излучателей, можно точно определить силу рассеивания и коэффициент отражения границы на границе раздела сред и получить максимально достоверную картину его внутренней структуры с заданной степенью разрешения.
Время цикла перемещения объекта 5 во время исследования также легко определяется, так как синхронизация между лазерными импульсами, вырабатываемыми импульсно-модулированным лазером 1 и тактовым генератором, управляющим работой аналого-цифрового преобразователя 8, реализована путем сдвига сигнала по времени с помощью фазовой Фурье-фильтрации и легко достижима в предлагаемом способе, так как уже упоминалось выше параметры излучаемой и принимаемой акустической волны совпадают по форме. Кроме того расстояния перемещения объекта за один цикл без потери точности могут быть увеличены по причине наличия рабочей зоны, а не одной точки с оптимальными параметрами разрешения и минимумом искажений.
Для осуществления вышеуказанного способа предлагается устройство, которое включает включающее импульсно-модулированный лазер 1, оптическую систему 2, распределенный оптико-акустический преобразователь 3 криволинейной формы, решетку пьезоэлементов 4 криволинейной формы образующую с оптико-акустическим преобразователем единый блок 12, помещенный в емкость с иммерсионной жидкостью 7, а так же многоканальный усилитель 8 с многоканальным аналого-цифровым преобразователем 9, компьютер 10 и графического процессора 11.
Оптико-акустический преобразователь 3 и решетка пьезоэлементов 4,образующие вместе единый блок 12, показаны в развернутом виде на фиг. 4. Единый блок 12 имеет тороидальную форму с апертурой приемной антенны в диапазоне от 90 до 180 градусов и количеством приемных элементов равным или большим количеству излучающих элементов и при этом кратным 8.
Единый блок 12, входящий в состав устройства, состоит из чередующихся полос излучателей 3 и приемников 4, не соприкасающиеся между собой и приклеенных на жесткую массивную основу, имеющую выемку тороидальной формы. Единый блок 12 помещен в емкость с иммерсионной жидкостью 7. Перемещение единого блока 12 осуществляется только вместе с основанием (на фиг. 4. не показано).
Форма выемки в основании соответствует расчетной форме единого блока 12 и обеспечивает фиксацию распределенного оптико-акустического преобразователя 3 и решетки пьезоэлементов 4 в заданном положении. Расстояния между элементами оптико-акустического преобразователя 3 и решетки пьезоэлементов 4 выбираются минимально исключающими электрический контакт между ними и одинаковы для всех элементов единого блока 12. При этом излучающие элементы оптико-акустического преобразователя 3 служат дополнительными изоляторами пот отношению к элементам решетки пьезоэлементов 4.
Все элементы оптико-акустический преобразователя 3 и все элементы решетки пьезоэлементов 4 соединены между собой соответствующими шинами 22 и 23, которые в свою очередь связаны с многоканальным аналого-цифровым преобразователем 9 при помощи электрических проводов 24.
Элементы распределенного оптико-акустический преобразователя 3 и решетки пьезоэлементов 4 представляют собой вытянутые полоски, ширина которых существенно меньше их длины, отличаясь не менее чем на порядок. Соотношение длинны и ширины элементов единого блока 12 определяется исходя из величин R и r и размеров его основания (на фиг. 4. не показано). Так ширина элементов единого блока 12 рассчитывается как минимально необходимая для соответствия требуемой мощности излучения, а максимальная длина определяется величиной r данного единого блока 12.
Размеры единого блока 12, радиусы его кривизны R и r, а так же апертуры Ф и Θ определяются исходя из размеров исследуемого объекта 5. Поэтому в составе предлагаемого для осуществления способа устройства допускается использование нескольких единых блоков.
Пример осуществления способа.
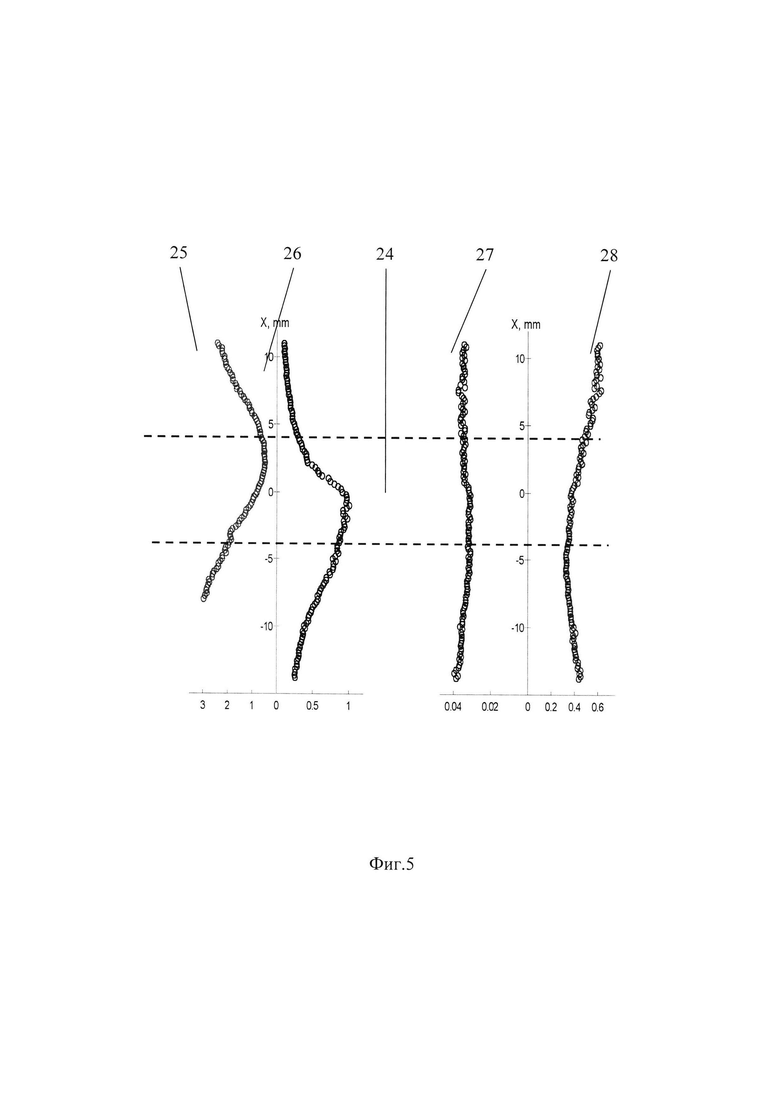
В экспериментальном устройстве решетка имела следующие параметры r_f=40 мм, R=4 мм, Ф=20°, Θ=15°. В качестве модели точечного акустического рассеивателя была использована игла диаметром 0,2 мм и зафиксирована в дюралюминиевом держателе. Игла перемещалась вдоль оси X единого блока 12 внутри емкости заполненной водой. Полученные при этом отраженные сигналы обработаны с использованием алгоритма FBP. Полученное при этом изображение лазерно-ультразвукового поля, было восстановлено в режиме реального времени с частотой кадров до 30 Гц в плоскости XZ, перпендикулярной игле. Параметры изображения составили 1 мм × 1 мм и 400 × 400 пикселей. Полученные в результате экспериментальные характеристики области чувствительности и пространственного разрешения представлены на Фиг. 5, где цифрой 24 обозначена около нулевая область на оси X, цифрой 25 ширина области чувствительности в мм, цифрой 26 нормализованная чувствительность единицы измерения, цифрой 27 осевое разрешение в мм и цифрой 28 боковое разрешение.
Из полученных графиков видно, что в около нулевой области 24 все показатели характеризующие положение иглы и ее размеры имели минимальное отклонение от ее истинного положения.
Таким образом, предлагаемый способ и устройство для его осуществления, позволяют достичь заявляемый технический результат. Все признаки, описывающие данную группу изобретений, необходимы и достаточны для ее осуществления и могут быть применены на практике.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЛАЗЕРНОЙ ОПТИКО-АКУСТИЧЕСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2011 |
|
RU2486501C2 |
| СПОСОБ ЛАЗЕРНО-АКУСТИЧЕСКОГО КОНТРОЛЯ ТВЕРДЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232983C2 |
| ОПТИКО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЛАЗЕРНО-УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2022 |
|
RU2793566C1 |
| Способ обследования автомобильных шин | 2020 |
|
RU2781773C2 |
| ЛАЗЕРНЫЙ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОП | 2010 |
|
RU2544257C2 |
| Способ импульсно-периодического лазерно-ультразвукового контроля твердых материалов и устройство для его осуществления | 2017 |
|
RU2653123C1 |
| УЛЬТРАЗВУКОВОЙ ТОМОГРАФ И КОЛЬЦЕВАЯ АНТЕННАЯ РЕШЕТКА ДЛЯ УЛЬТРАЗВУКОВОГО ТОМОГРАФА | 1999 |
|
RU2145797C1 |
| ОПТОАКУСТИЧЕСКИЙ ОБЪЕКТИВ | 2015 |
|
RU2603819C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ УЗЛОВ ТЕЛЕЖЕК ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2480741C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФИЗИКО-МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2214590C2 |

Использование: для неразрушающего контроля твердых материалов. Сущность изобретения заключается в том, что для осуществления предлагаемых способа и устройства оптико-акустическому преобразователю и решетке пьезоэлементов придают тороидальную форму, которая сфокусирована таким образом, что ее центр кривизны, определяемый величиной радиусов кривизны и угловых апертур в плоскостях XY, совпадает с началом координат, используемых при позиционировании исследуемого объекта, при этом исследуемый объект помещают в иммерсионную среду и располагают так, что излучаемый акустический сигнал фокусируется не на его поверхности, а на некоторой глубине внутри него. Данная часть волнового поля является рабочей зоной анализа акустического сигнала, а ее размеры определяются расстоянием между двумя фокусами Гаусовых пучков, соответствующих волнам в плоскостях XY. Технический результат: повышение точности системы визуализации, работающей в режиме реального времени, а также обеспечение возможности создания устройства, позволяющего на основе использования предлагаемого способа исследовать различные объекты произвольной формы, включая биологические. 2 н. и 3 з.п. ф-лы, 5 ил.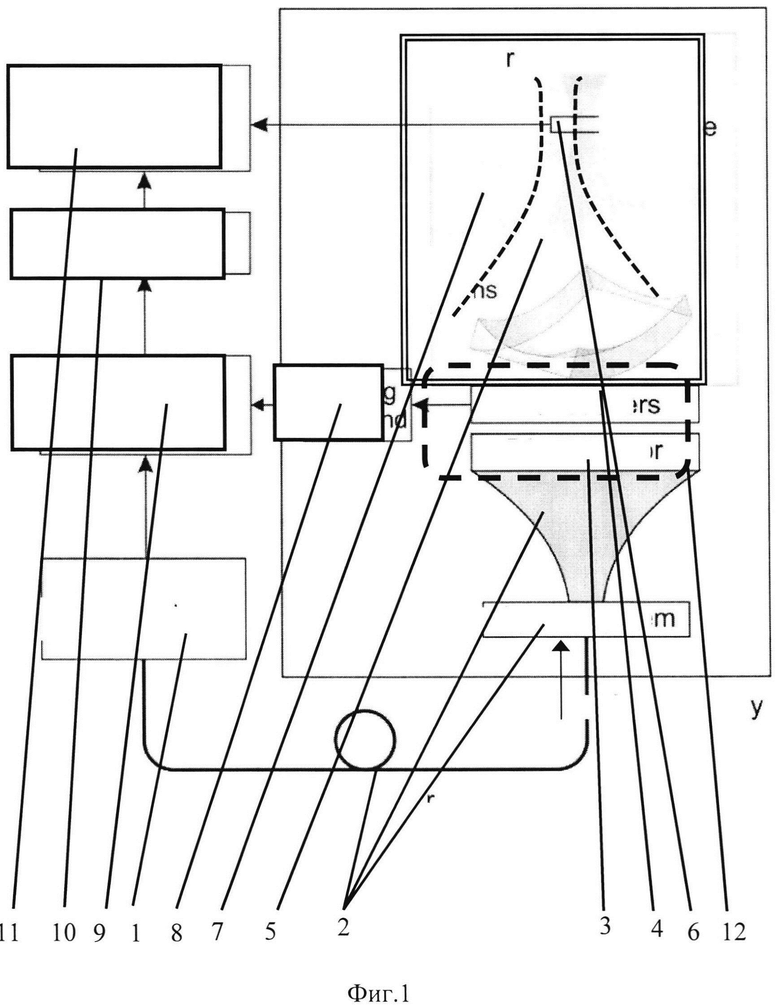
1. Способ лазерной, оптико-акустической томографии, включающий генерацию оптического импульса импульсно-периодическим лазером, передачу его через оптическую систему и последующее преобразование его в акустический сигнал с помощью распределенного оптико-акустического преобразователя криволинейной формы, излучение этого сигнала в исследуемый объект, который помещен в иммерсионную среду и прием отраженного акустического сигнала решеткой пьезоэлементов, усиление сигнала, преобразование аналогового сигнала в цифровую форму, и построение модели внутренней структуры исследуемого объекта, отличающийся тем, что излучаемый в исследуемый объект акустический сигнал фокусируется не на поверхности исследуемого объекта, а внутри него на глубине, определяемой расстоянием между двумя фокусами Гаусовых пучков, соответствующих волнам в плоскостях XY, которые характеризуют положение распределенного оптико-акустического преобразователя криволинейной формы и решетки пьезоэлементов, и которое в свою очередь является рабочей зоной анализа отраженного от внутренней структуры исследуемого объекта акустического сигнала, перемещение исследуемого объекта или оптико-акустического преобразователя криволинейной формы, а также их позиционирование производят дискретно после завершения цикла излучения акустического сигнала - прием отраженного акустического сигнала, с таким расчетом, чтобы рабочая зона акустического сигнала всегда оставалась внутри исследуемого объекта, причем для построения 2D модели отдельного слоя исследуемого объекта используют алгоритм обратных проекций и алгоритм учета преломления акустического сигнала на его поверхности.
2. Способ по п. 1, отличающийся тем, что синхронизация между лазерными импульсами и тактовым генератором, управляющим работой аналого-цифрового преобразователя, реализована путем сдвига сигнала по времени с помощью фазовой Фурье-фильтрации.
3. Способ по п. 1, отличающийся тем, что глубина фокусировки акустического сигнала определяется размерами исследуемого объекта, а минимальная толщина слоя сканирования составляет 100 мкм.
4. Устройство для осуществления способа по п. 1, включающее импульсно-модулированный лазер, оптическую систему, распределенный оптико-акустический преобразователь, решетку пьезоэлементов, образующую с оптико-акустическим преобразователем единый блок криволинейной формы, помещенный в емкость с иммерсионной жидкостью, а также многоканальный усилитель с многоканальным аналого-цифровым преобразователем, систему сбора и обработки данных, графический процессор, компьютер и соединяющие их элементы, отличающееся тем, что оптико-акустический преобразователь и решетка пьезоэлементов, принимающая отраженный сигнал, образующие вместе единый блок, имеют тороидальную форму с апертурой в диапазоне от 90 до 180 градусов и количеством приемных элементов, равным или большим количеству излучающих элементов и при этом кратным восьми, при этом положение оптико-акустического преобразователя и решетки пьезоэлементов совпадают в системе координат характеризующих их форму и размеры.
5. Устройство для осуществления способа по п. 4, отличающееся тем, что единый блок криволинейной формы состоит из чередующихся полос излучателей и приемников параллельных друг другу и не соприкасающихся между собой, которые в свою очередь зафиксированы расположенной на жестком массивном основании в выемке тороидальной формы повторяющей характеристики заданные для оптико-акустического преобразователя и решетки пьезоэлементов, при этом все полосы излучатели и все полосы приемники соединены между собой соответствующими шинами, которые в свою очередь связаны с многоканальным усилителем и далее с многоканальным аналого-цифровым преобразователем, при этом размеры основы единого блока и радиусы его кривизны определяются, исходя из размеров исследуемых объектов.
| CN 109655525 A, 19.04.2019 | |||
| JP 2000346831 A, 15.12.2000 | |||
| Способ ультразвукового контроля сварных швов | 1988 |
|
SU1585748A1 |
| СПОСОБ НЕКОНТАКТНОЙ УЛЬТРАЗВУКОВОЙ ДИАГНОСТИКИ СВАРНЫХ СОЕДИНЕНИЙ | 2006 |
|
RU2337353C1 |
| СПОСОБ И УСТАНОВКА УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНОГО ШВА СТЫКОВОГО СОЕДИНЕНИЯ ДВУХ ПОПЕРЕЧНЫХ КОНЦОВ ДВУХ МЕТАЛЛИЧЕСКИХ ПОЛОС | 2010 |
|
RU2531508C2 |
| US 20100319456 A1, 23.12.2010. | |||

