Изобретение относится к области антенной технике, в частности, к комплексным антенным устройствам (КАУ) радиоэлектронных средств (РЭС) для установки на подводных судах, преимущественно на тяжелых автономных, необитаемых подводных аппаратах (АНПА) дальнего радиуса действия для обеспечения приема и передачи радиосигналов в километровом, метровом, дециметровом и сантиметровом диапазонах электромагнитных волн.
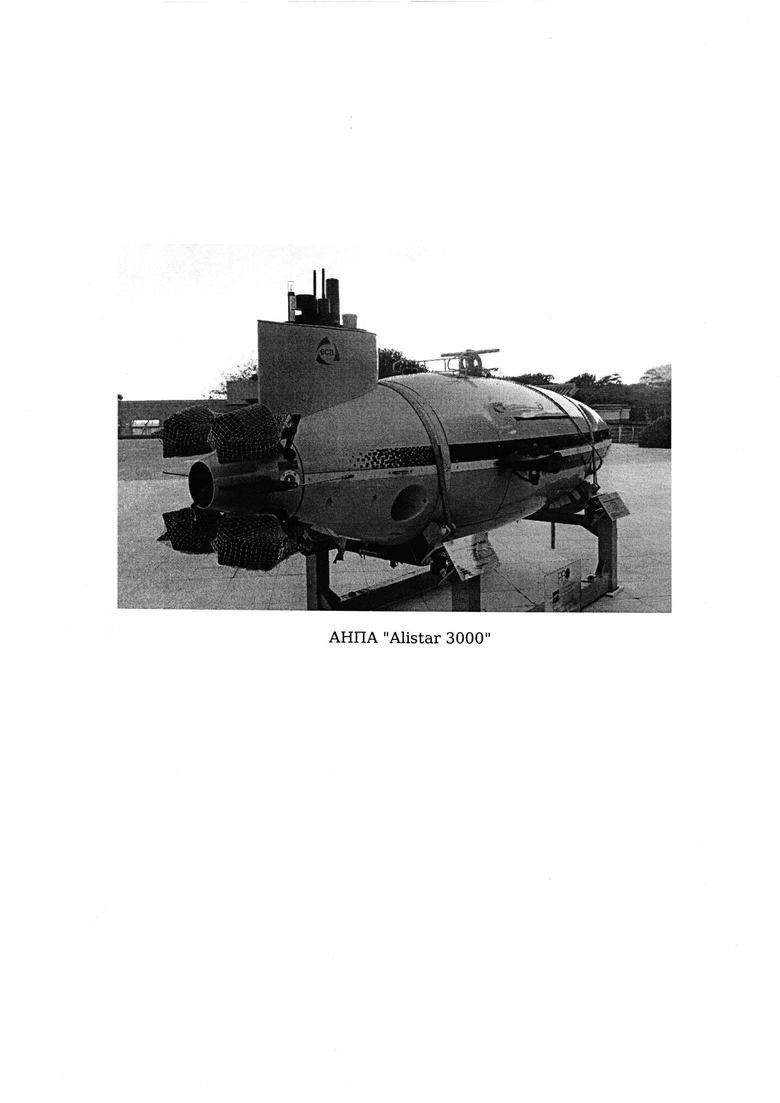
Известен автономный необитаемый подводный аппарат "Alistar 3000" [http://www.ecagroup.com/en/solutions/alistar -3000-auv-autonomo us-underwater-vehicle]. АНПА предназначен для выполнения проблемных глубоководных задач обзора и осмотра. Указанный АНПА обладает модульной структурой, способной нести множество точных датчиков. На кормовом вертикальном стабилизаторе данного АНПА сверху размещены антенны GPS, Wi-Fi, УКВ- и спутниковой связи (см. приложение 1).
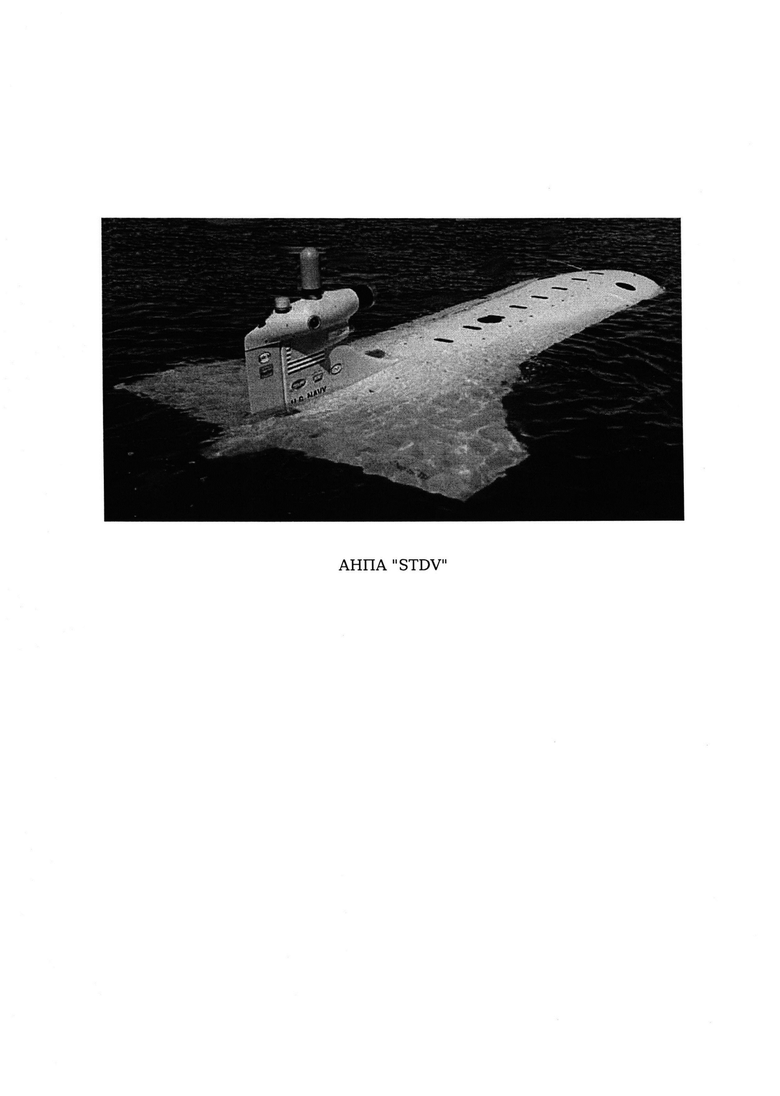
Известен также АНПА "STDV" [http://zonwar.ru/news2/news_241_Manta_UUV.html], созданный для демонстрации и оценки в лабораторно-полигонных условиях эффективности принятых конструктивных и технологических решений концепции "Manta". На АНПА размещен кормовой вертикальный стабилизатор, имеющий обтекатель. На обтекателе размещены антенны двустороннего УКВ-канала связи, приемника GPS и спутникового канала связи SATCOM (см. приложение 2).
Известен подводный мобильный АНПА, ЕР3009341, [UNDERWATER MOBILE BODY. https://patentscope.wipo.int/search/ru/]. Данный АНПА способен получать информацию о гидросфере и перемещаться между позицией под водой и поверхностью воды, включает в себя антенный блок, расположенный в задней части корпуса и снабженный антенной, которая передает полученную информацию о гидросфере, при этом антенный блок удерживает антенну так, что антенна способна поворачиваться в вертикальном направлении.
К общим недостаткам указанных выше аналогов следует отнести:
- невозможность осуществить связь с береговым центром управления (БЦУ), когда АНПА находится в полностью погруженном состоянии;
- отсутствие возможности обмена информацией с береговыми системами связи через систему сотовой связи;
- отсутствие возможности обмена информацией через подводную стационарную установку (ПСУ).
Наиболее близким по технической сущности к заявляемому устройству является комплексное антенное устройство (КАУ) автономного необитаемого подводного аппарата АНПА [Патент РФ на полезную модель №97569, МПК H01Q 1/00, опубликован 10.09.2010 г., бюл. №25.]. КАУ АНПА содержит антенны обнаружения радиолокационных сигналов (ОРС), спутниковой навигационной системы (СНС) и спутниковой системы связи (ССС), с которыми функционально соединена приборная часть соответствующих радиоэлектронных средств (РЭС), размещенная в кормовом вертикальном стабилизаторе АНПА, где также установлены мачта, выдвижное подъемно-мачтовое устройство (ПМУ). Кормовой вертикальный стабилизатор выполнен в виде совмещенной с ним мачты, причем использована закрытая стационарная мачта каплевидного типа, которая разделена герметичной перегородкой на герметичные отсеки носовой и кормовой. В герметичном носовом отсеке закрытой стационарной мачты расположена приборная часть соответствующих РЭС КАУ, а в герметичном кормовом отсеке закрытой стационарной мачты расположены кабельное отделение и выдвижное ПМУ, снабженное электроприводом выдвижного ПМУ. КАУ сформировано и жестко закреплено на площадке в верхней части выдвижного ПМУ. В КАУ, закрытом герметичным радиопрозрачным обтекателем сферического типа, соосно и одна над другой расположены антенны ОРС, затем СНС и далее ССС. В соответствии с заданным алгоритмом мониторинга радиотехнической обстановки система управления АНПА выдает команду на его всплытие под поверхность моря, причем исключено пересечение АНПА свободной поверхности воды, в результате чего уменьшена общая эффективная поверхность рассеивания КАУ. Обмен данными с БЦУ происходит с целью передачи информации с АНПА, приема команд управления с БЦУ и передачи данных о состоянии внутренних систем АНПА. Известное устройство может быть использовано для приема радиолокационных сигналов, приема и передачи радиосигналов для определения местоположения АНПА в географической системе координат, для обеспечения работы комплекса АНПА над поверхностью моря с целью ведения им контроля за радиотехнической обстановкой в УКВ-диапазоне, приема команд управления и передачи информации о техническом состоянии АНПА. Данное устройство является наиболее близким по технической сущности заявляемому изобретению и выбрано в качестве прототипа.
К недостаткам данного устройства следует отнести то, что:
- при нахождении АНПА на глубине прием и передачу информации посредством известного КАУ осуществить невозможно, т.е. теряется возможность оперативного управления АНПА;
- известное КАУ может быть использовано только для приема радиолокационных сигналов, приема радиосигналов для определения местоположения АНПА в географической системе координат, для обеспечения работы комплекса АНПА над поверхностью моря с целью ведения им контроля за радиотехнической обстановкой в УКВ-диапазоне, приема команд управления и передачи информации о техническом состоянии АНПА;
- конструктивные элементы и системы КАУ такие как приборная часть РЭС, кабельное отделение РЭС, а также выдвижное ПМУ размещены непосредственно в герметичных отсеках закрытой стационарной мачты (кормовом, вертикальном стабилизаторе), что практически лишает возможности их технологического обслуживания.
Анализ недостатков известного КАУ для АНПА подтверждает, что их наличие существенно ограничивают функциональные возможности КАУ АНПА, а следовательно, АНПА в целом.
Задачей, на решение которой направлено изобретение, является расширение функциональных возможностей модуля КАУ АНПА за счет возможности осуществления управления АНПА и передачи информации при нахождении АНПА как в подводном, так и в подводном положении и, кроме того, повышения технологичности обслуживания модуля КАУ в составе АНПА.
Поставленная задача достигается тем, что в модуле комплексного антенного устройства радиоэлектронных средств АНПА, содержащем функционально связанные с приборной частью соответствующих радиоэлектронных средств, антенну спутниковой навигационной системы (СНС), антенну спутниковой системы связи (ССС) и антенну УКВ-модема, а также антенну обнаружения радиоэлектронных сигналов (ОРС), установленную на конце антенной мачты выдвижного подъемно-мачтового устройства с возможностью подъема антенной мачты вверх перпендикулярно продольной оси АНПА, причем приборная часть соответствующих радиоэлектронных средств КАУ и подъемно-мачтовое устройство размещены в вертикальном кормовом стабилизаторе АНПА, дополнительно размещены буксируемая кабельная радиоантенна (БКРА), выполненная с положительной плавучестью, антенна GSM-модема, антенна модема подводной радиосвязи для связи с подводной стационарной установкой (ПСУ). Вертикальный кормовой стабилизатор АНПА использован в качестве модуля для формирования в нем КАУ. Верхняя часть вертикального кормового стабилизатора выполнена в виде каплевидного обтекателя, а нижняя часть стабилизатора выполнена в виде поддона по форме, идентичной форме посадочного места, выполненного в корпусе АНПА для установки и крепления на нем модуля КАУ с возможностью съема всего модуля с посадочного места. Приборная часть радиоэлектронных средств модуля КАУ дополнительно содержит, функционально связанные между собой, блоки усиления и согласования сигналов антенн, коммутатор, ЦАП, АЦП и устройство управления КАУ, и размещена в герметичном корпусе, который установлен на поддоне в модуле КАУ, а устройство управления приборной частью модуля КАУ функционально соединено с системой бортового управления и навигации (СБУН) АНПА. Подъемно-мачтовое устройство, на антенной мачте которого установлена антенна обнаружения радиоэлектронных сигналов (ОРС), размещено на поддоне в модуле КАУ и снабжено электроприводом в герметичном исполнении, причем антенная мачта установлена в модуле КАУ с возможностью подъема антенны ОРС выше корпуса обтекателя. В носовой части обтекателя модуля КАУ выполнена антенная платформа, на которой установлены антенны УКВ-модема, GSM-модема, ССС и СНС. В кормовой части обтекателя установлена антенна модема подводной радиосвязи для связи с ПСУ. В кормовой оконечности корпуса обтекателя вдоль его продольной оси размещено также устройство для выпуска БКРА в море. БКРА размещена на барабане лебедки, снабженной электроприводом в герметичном исполнении, сама лебедка жестко установлена на поддоне в модуле КАУ, а между барабаном лебедки и устройством для выпуска БКРА в море, установлен кабельный канал с возможностью перемещения по нему БКРА при выпуске ее в море или сматывании на барабан лебедки.
Поставленная задача достигается также тем, что:
- съемное соединение модуля КАУ с посадочным местом на корпусе АНПА выполнено болтовым;
- антенна ОРС, установленная на конце антенной мачты ПМУ, размещена под радиопрозрачным сферическим колпаком;
- в качестве кабельного канала для БКРА использована труба;
- на выпускном конце БКРА установлено средство, обладающее гидродинамическим сопротивлением;
- антенна модема для связи с подводной стационарной установкой (ПСУ) выполнена рамочного типа;
- на поддоне КАУ размещен аварийный радиобуй, снабженный электромагнитным держателем.
В заявляемом модуле КАУ радиоэлектронных средств АНПА существенными признаками, общими для него и для его прототипа, являются следующие признаки:
- функционально связанные с приборной частью соответствующих радиоэлектронных средств, антенна спутниковой навигационной системы (СНС), антенна спутниковой системы связи (ССС) и антенна УКВ-модема, а также антенна обнаружения радиоэлектронных сигналов (ОРС) установленная на конце антенной мачты выдвижного подъемно-мачтового устройства с возможностью подъема антенной мачты вверх перпендикулярно продольной оси АНПА;
- приборная часть соответствующих радиоэлектронных средств КАУ и подъемно-мачтовое устройство размещены в вертикальном кормовом стабилизаторе АНПА.
Сопоставительный анализ существенных признаков заявляемого устройства и его прототипа показывает, что первый в отличии от прототипа имеет следующие существенные отличительные признаками:
- в модуле КАУ дополнительно размещены буксируемая кабельная радиоантенна (БКРА), выполненная с положительной плавучестью, антенна GSM-модема, антенна модема подводной радиосвязи для связи с подводной стационарной установкой (ПСУ),
- вертикальный кормовой стабилизатор АНПА использован в качестве модуля для формирования в нем КАУ, для чего верхняя часть вертикального кормового стабилизатора выполнена в виде каплевидного обтекателя, а нижняя часть стабилизатора выполнена в виде поддона по форме, идентичной форме посадочного места, выполненного в корпусе АНПА для установки и крепления на нем модуля КАУ с возможностью съема всего модуля с посадочного места,
- приборная часть радиоэлектронных средств модуля КАУ дополнительно содержит, функционально связанные между собой, блоки усиления и согласования сигналов антенн, коммутатор, ЦАП, АЦП и устройство управления модулем КАУ, и размещена в герметичном корпусе, который установлен на поддоне модуля КАУ, а устройство управления приборной частью модуля КАУ функционально соединено с системой бортового управления и навигации (СБУН) АНПА,
- подъемно-мачтовое устройство, на антенной мачте которого установлена антенна обнаружения радиоэлектронных сигналов (ОРС), размещено на поддоне в модуле КАУ и снабжено электроприводом в герметичном исполнении, причем антенная мачта установлена в модуле КАУ с возможностью подъема антенны ОРС выше корпуса обтекателя,
- в носовой части обтекателя модуля КАУ выполнена антенная платформа, на которой установлены антенны УКВ-модема, GSM-модема, ССС и СНС,
- в кормовой части обтекателя установлена антенна модема подводной радиосвязи для связи с ПСУ,
- в кормовой оконечности корпуса обтекателя вдоль его продольной оси размещено также устройство для выпуска БКРА в море,
- БКРА размещена на барабане лебедки, снабженной электроприводом в герметичном исполнении, сама лебедка жестко установлена на поддоне в модуле КАУ, а между барабаном лебедки и устройством для выпуска БКРА в море, установлен кабельный канал с возможностью перемещения по нему БКРА при выпуске ее в море или сматывании на барабан лебедки.
Предложенный модуль КАУ РЭС АНПА предназначен для использования на тяжелых АНПА дальнего радиуса действия, работа которых осуществляется преимущественно под водой.
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата. Именно такая совокупность существенных признаков заявленного модуля КАУ АНПА выполняет следующие функциональные задачи для достижения требуемого технического результата:
- обеспечение обмена информацией АНПА через ПСУ за счет антенны модема подводной радиосвязи в ДВ-диапазоне;
- обеспечение обмена информацией АНПА с БЦУ в СДВ-диапазоне при нахождении АНПА на глубине за счет БКРА;
- обеспечение обмена информацией АНПА с БЦУ в зоне действия базовой станции GSM, за счет наличия антенны GSM;
- повышение надежности управления АНПА за счет использования заявленного модуля КАУ;
- обеспечение гибкости в проектировании каналов связи за счет использования одного АЦП и одного ЦАП для всех антенн;
- обеспечение быстрого обнаружения АНПА в случае чрезвычайной ситуации (ЧС) за счет установленного на модуле КАУ АНПА аварийного всплывающего радиобуя.
На основе изложенного можно заключить, что совокупность существенных отличительных признаков заявленного устройства имеет причинно-следственную связь с достигнутым техническим результатом. Следовательно, заявленное устройство является новым, обладает изобретательским уровнем и пригодно для использования.
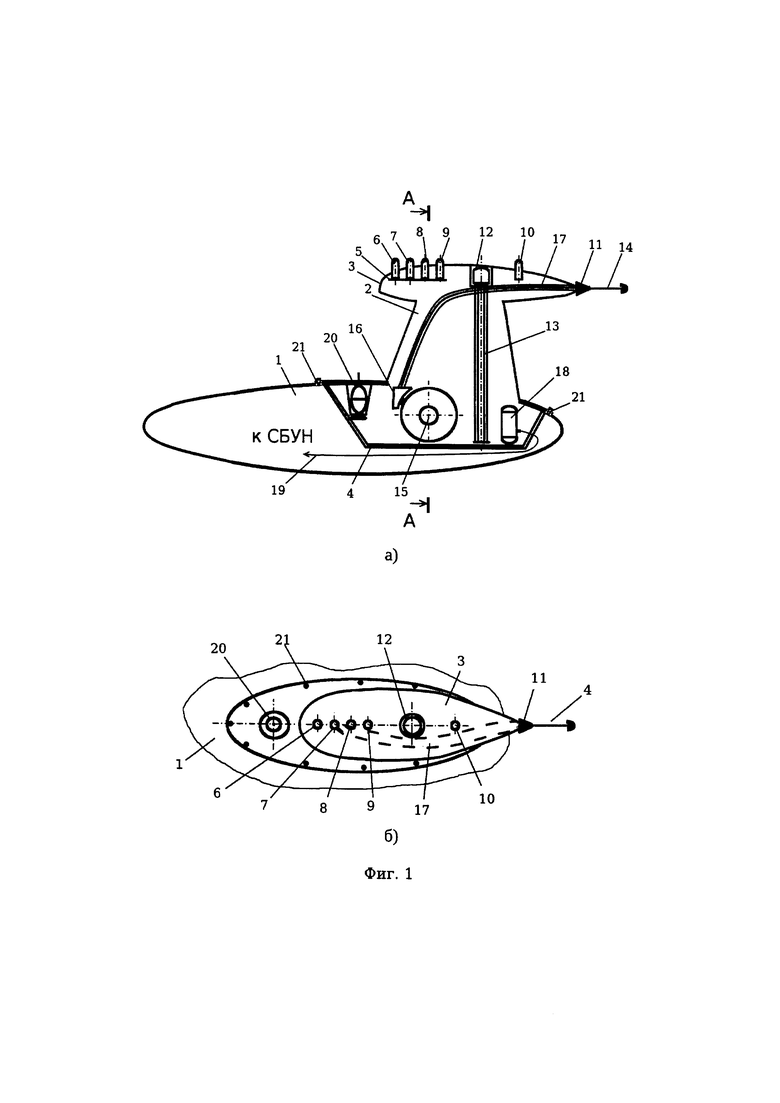
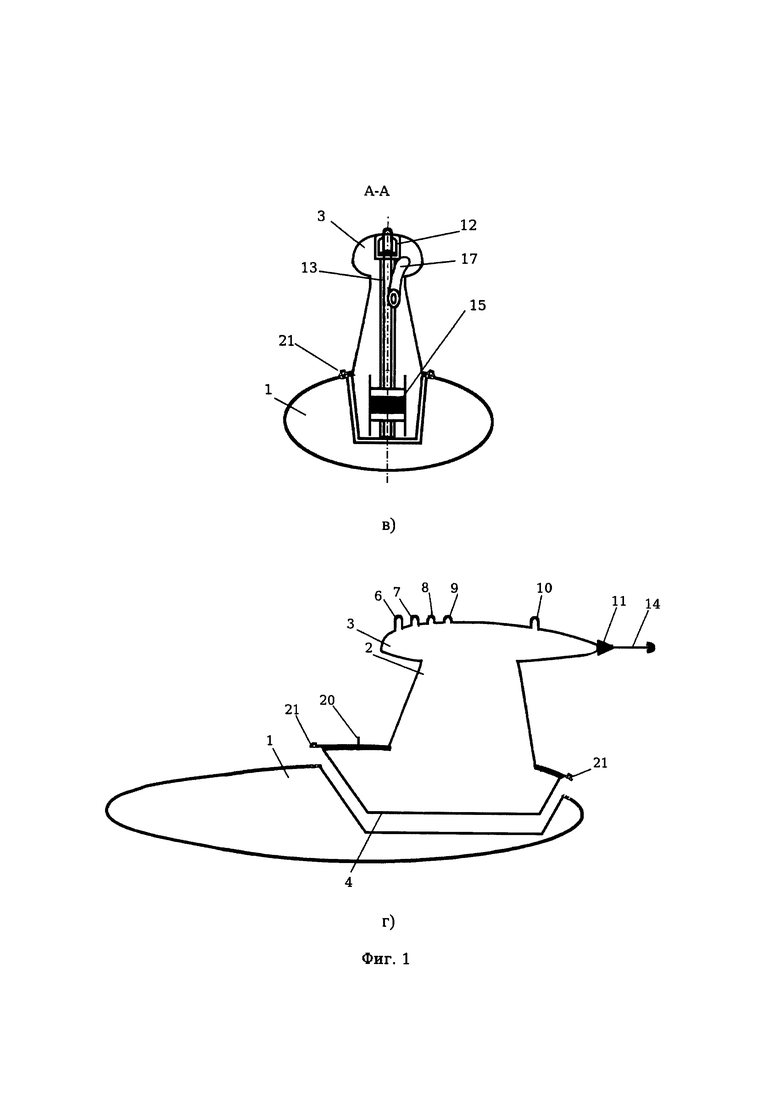
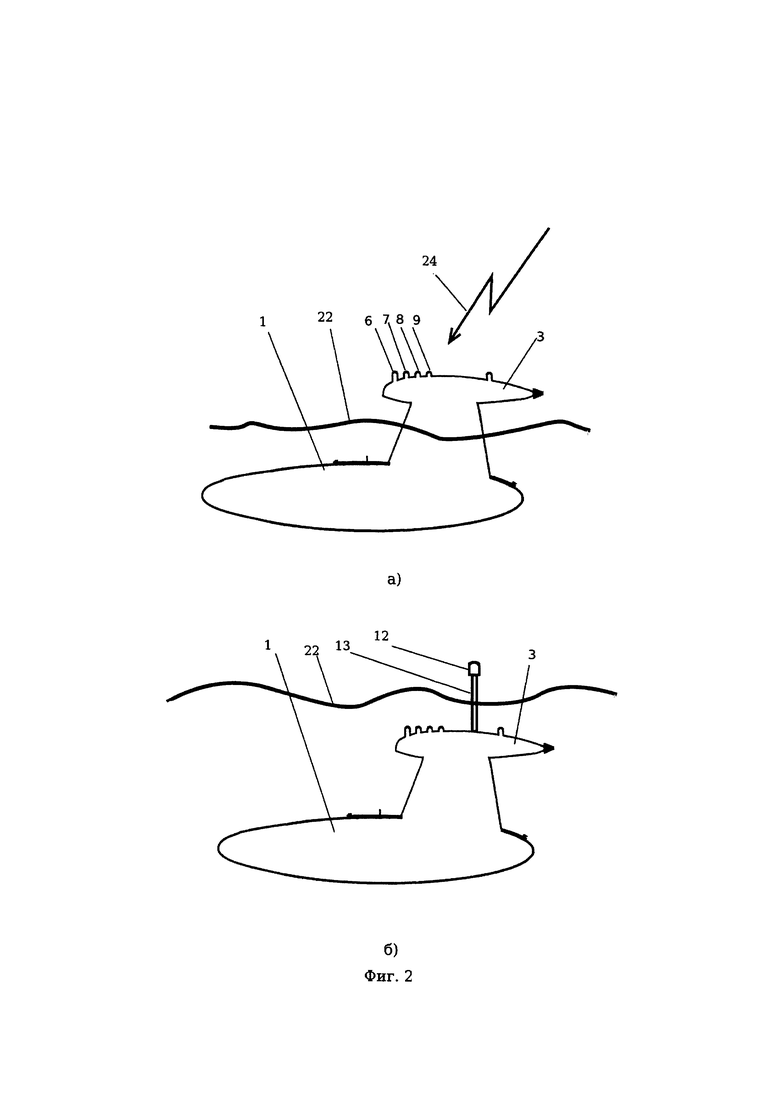
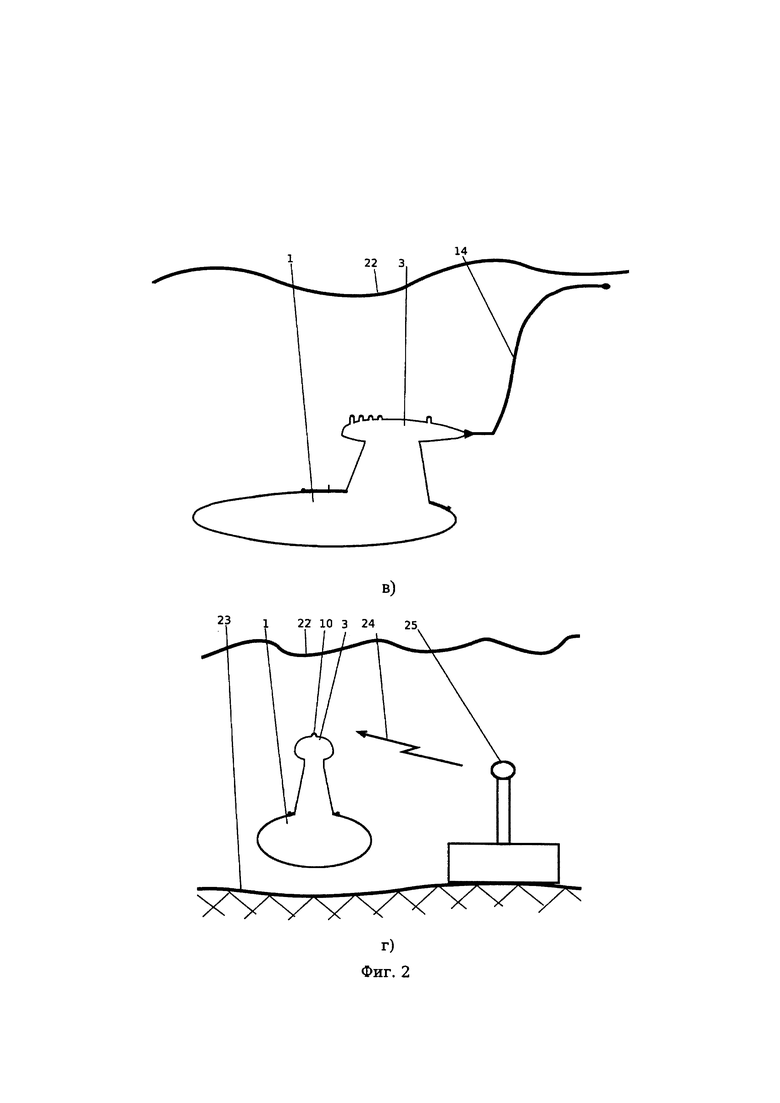
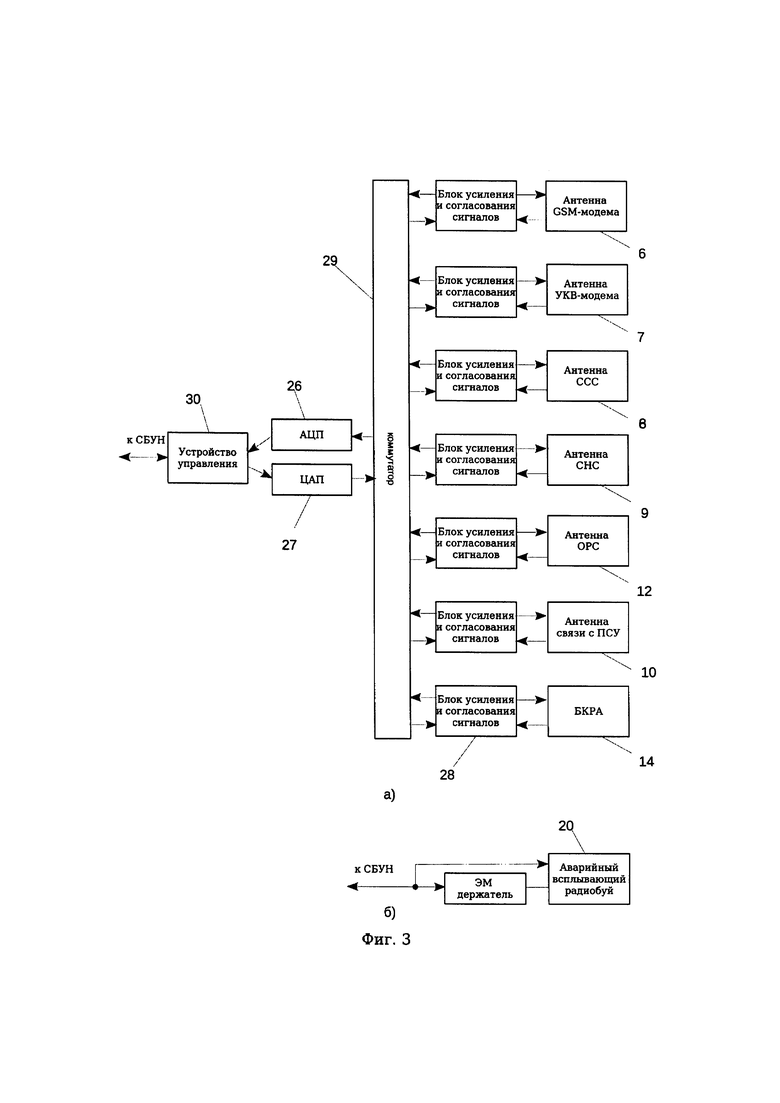
Изобретение поясняется чертежами, где на фиг. 1 показан модуль комплексного антенного устройства радиоэлектронных средств АНПА. Структурная схема модуля КАУ, установленного на АНПА: а) общий вид; б) вид сверху; в) разрез А-А на фиг. 1а; г) модуль КАУ отсоединен от АНПА. На фиг. 2. показана работа АНПА: а) АНПА находится под водой, каплевидный обтекатель над поверхностью воды; б) АНПА находится в погруженном состоянии, радиопрозрачный колпак с антенной ОРС над поверхностью воды; в) работа с БКРА; г) работа модуля КАУ под водой с ПСУ. На фиг. 3. а) функциональная схема приборной части модуля КАУ и б), функциональная схема аварийного всплывающего радиобуя.
На чертежах приняты следующие обозначения:
1 - корпус АНПА; 2 - вертикальный кормовой стабилизатор; 3 - каплевидный обтекатель; 4 - поддон; 5 - антенная платформа; 6 - антенна GSM-модема; 7 - антенна УКВ-модема; 8 - антенна спутниковой системы связи (ССС); 9 - антенна СНС; 10 - антенна для связи с ПСУ; 11 - устройство для выпуска в море БКРА; 12 - антенна ОРС в радиопрозрачном колпаке; 13 - ПМУ; 14 - БКРА; 15 - лебедка с электроприводом; 16 - намоточное устройство с укладчиком; 17 - кабельный канал выпуска БКРА; 18 - приборная часть КАУ; 19 - кабель связи модуля КАУ со СБУН АНПА; 20 - АВРБ с электромагнитным держателем; 21 - болтовое крепление кормового вертикального стабилизатора; 22 - поверхность воды; 23 - поверхность дна; 24 - радиосигнал; 25 - подводная стационарная установка. Приборная часть модуля КАУ содержит: 26 - АЦП; 27 - ЦАП; 28 - блоки усиления и согласования сигналов антенн; 29 - коммутатор; 30 - УУ.
Модуль КАУ РЭС АНПА размещен на корпусе 1 АНПА и выполнен в виде полого вертикального кормового стабилизатора 2, установленного в диаметральной плоскости АНПА (фиг. 1а). Верхняя часть стабилизатора 2 выполнена в виде каплевидного обтекателя 3, а нижняя часть стабилизатора выполнена в виде поддона 4 по форме, идентичной форме посадочного места, выполненного в корпусе 1 АНПА для установки и крепления на нем модуля КАУ с возможностью съема модуля (фиг. 1г). На каплевидном обтекателе 3 в его передней части выполнена антенная платформа 5, на которой последовательно установлены антенны GSM-модем 6, УКВ - модем 7, ССС 8 и СНС 9. На поверхности каплевидного обтекателя 3 вне антенной платформы 5 установлена антенна 10 для связи с ПСУ. В кормовой оконечности корпуса обтекателя 3 вдоль его продольной оси размещено также устройство 11 для выпуска БКРА 14 в море. Внутри вертикального кормового стабилизатора 2, перпендикулярно продольной оси АНПА, установлено ПМУ 13 с возможностью подъема его мачты вверх за пределы каплевидного обтекателя 3, при этом на конце мачты размещена антенна ОРС 12 в радиопрозрачном колпаке. На поддоне 4 модуля КАУ установлена лебедка 15 с электроприводом и намоточным устройством 16 укладки кабельной антенны 14. Кабельный канал 17 для перемещения кабельной антенны 14 установлен между барабаном лебедки 15 и устройством 11 выпуска кабельной антенны в море. Приборная часть 18 РЭС КАУ размещена в поддоне 4 модуля КАУ и дополнительно содержит функционально связанные блоки 28 усиления и согласования сигналов, АЦП 26, ЦПА 27 и УУ 30 (фиг. 3а). Приборная часть 18 модуля КАУ через УУ 30 соединена со СБУН АНПА по кабелю 19 связи. В передней нижней части поддона 4 модуля КАУ размещен АВРБ 20, снабженный электромагнитным держателем. Крепление вертикального кормового стабилизатора 2 к корпусу 1 АНПА выполнено с помощью болтов 21. В приборной части 18 модуля КАУ (фиг. 3а) блоки 28 согласования и усиления сигналов антенн через коммутатор 29 соединены с АЦП 26 и ЦАП 27, которые в свою очередь соединены с УУ 30 модуля КАУ. АЦП 26, ЦАП 27 и УУ 30 являются общими для всех антенн, а алгоритмы обработки сигналов разные. Это позволяет уменьшить массо-габаритные характеристики приборной части КАУ и повысить надежности работы модуля КАУ АНПА в целом.
Устройство работает следующим образом.
АНПА, находясь в море, независимо от судна-носителя, выполняет миссию по программе, заданной в БЦУ. Обмен информации АНПА с БЦУ, а также с подводной стационарной установкой (ПСУ) осуществляется посредством модуля КАУ АНПА.
Работа модуля КАУ с использованием УКВ, GSM, ССС, СНС антенн показана на фиг. 2 а). АНПА совершает подвсплытие на глубину, позволяющую верхнему каплевидному обтекателю 3 находиться над поверхностью воды 22. Из СБУН АНПА в УУ 30 КАУ подается команда на связь АНПА с помощью УКВ, GSM, ССС антенн, либо на получение сигналов с навигационных спутников по СНС антенне. УКВ-антенна используется для связи с кораблями и летательными аппаратами. GSM-антенна используется для связи с базовой GSM-станцией. ССС-антенна используется для связи по спутниковому каналу связи. СНС-антенна используется для определения координат АНПА. Принятый соответствующей антенной радиосигнал передается в блок 28 (фиг. 3а) усиления и согласования сигналов для усиления, после чего через коммутатор 29 подается в аналого-цифровой преобразователь 26, откуда в цифровом виде поступает в устройство управления 30 модуля КАУ. Устройство управления 30 в соответствии с заданным протоколом связи обрабатывает сигнал для передачи в СБУН АНПА. Затем при необходимости устройство управления 30 формирует ответный сигнал в цифровом виде. Далее ответный сигнал поступает на ЦАП 27, усиливается в блоке 28 усиления и согласования сигналов и далее с помощью соответствующей антенны излучается в пространство.
Работа модуля КАУ с использованием антенны ОРС 12 показано на фиг. 2б). АНПА находится в погруженном состоянии в непосредственной близости от поверхности воды 22, при этом радиопрозрачный колпак с антенной ОРС 12 выдвигается над поверхностью воды с помощью ПМУ 13. Это позволяет снизить заметность АНПА. Сигнал с антенны ОРС 12 усиливается через блок 28 усиления и согласования сигналов и подается на АЦП 26, после чего поступает в цифровом виде в УУ 30 для последующей обработки и анализа.
Работа КАУ с использованием БКРА показана на фиг. 2в). БКРА 14 представляет собой кабель с положительной плавучестью, на выпускном конце которого установлено средство, обладающее гидродинамическим сопротивлением, которое незначительно изменяет равновесное положение кабеля при буксировке. Однородный кабель в стационарном течении вытягивается по прямой линии под некоторым углом относительно вектора скорости набегающего потока. При получении команды от устройства управления 30 на прием СДВ сигналов лебедка 15 производит разматывание кабеля, и БКРА 14 вытягивается по кабельному каналу 17 из АНПА под действием гидродинамических сил. Устройство 11 выпуска БКРА выполнено таким образом, что предотвращается наматывание БКРА на элементы движителя АНПА. Антенна СДВ диапазона дает возможность оперативного получения команд управления с БЦУ при нахождении АНПА на глубине.
Работа модуля КАУ с использованием антенны 10 для связи с ПСУ показана на фиг. 2г). Технические средства контактной коммуникации модуля КАУ АНПА с подводными сетевыми структурами или ПСУ позволяют увеличить время работы АНПА под водой. Для обмена информацией АНПА приближается к ПСУ на расстояние не более 10 м и производит посредством модуля КАУ бесконтактный сеанс связи в ДВ диапазоне.
Работа модуля КАУ со всеми типами антенн происходит по схожему алгоритму. Радиосигнал принимается антенной, затем усиливается в блоке 26 усиления и согласования сигналов, после чего через коммутатор 29 подается в АЦП 26, откуда в цифровом виде поступает в УУ 30. В соответствии с заданным протоколом связи устройство управления 30 модуля КАУ обрабатывает сигнал для его передачи в СБУН АНПА. Затем при необходимости УУ 30 формирует ответный сигнал в цифровом виде. Ответный сигнал поступает на ЦАП 27, усиливается в блоке 28 усиления и согласования сигналов и далее с помощью соответствующей антенны излучается в пространство.
АВРБ 20 (фиг. 1а) крепится к корпусу АНПА с помощью электромагнитного держателя. В процессе работы АНПА в память АВРБ с определенной периодичностью заносятся данные о координатах АНПА и работе его внутренних систем. В чрезвычайных ситуациях на электромагнитный держатель подается команда на отпуск, и АВРБ отделяется от АНПА, затем всплывает к поверхности воды. Далее АВРБ излучает радиосигнал с целью его оперативного обнаружения спасательной командой.
Таким образом, сформирован модуль КАУ АНПА, обеспечивающий связь в и километровом, и метровом, и дециметровом и сантиметровом диапазонах частот как в надводном, так и подводном положении АНПА, а также при длительном пребывании АНПА в подводном положении.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕВРАЩАЮЩЕЕСЯ ПОДЪЕМНО-МАЧТОВОЕ УСТРОЙСТВО ПОДВОДНОЙ ЛОДКИ | 1988 |
|
SU1840304A1 |
| Пост наблюдения на базе привязного беспилотного летательного аппарата | 2023 |
|
RU2807768C1 |
| Транспортировщик водолазов | 2021 |
|
RU2760757C1 |
| ПОДВИЖНАЯ КОМПЛЕКСНАЯ ИСПЫТАТЕЛЬНАЯ АППАРАТНАЯ | 2017 |
|
RU2651779C1 |
| Подъемно-мачтовое устройство | 2016 |
|
RU2622516C1 |
| НАЗЕМНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ | 2007 |
|
RU2352480C1 |
| ПОДВИЖНОЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ "ЗВЕРОБОЙ-М" | 2014 |
|
RU2563699C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| Устройство для повышения разведзащищённости и помехозащищённости мобильных узлов связи | 2024 |
|
RU2838888C1 |
| УСТРОЙСТВО РАЗДВИЖНОГО ВОЛНОВОДНОГО ТРАКТА ДЛЯ МНОГОФУНКЦИОНАЛЬНОЙ АНТЕННЫ РЛС | 1999 |
|
RU2151082C1 |
Изобретение относится к комплексным антенным устройствам (КАУ) радиоэлектронных средств (РЭС) для установки на подводных судах, преимущественно на тяжелых автономных, необитаемых подводных аппаратах (АНПА) дальнего радиуса действия для обеспечения приема и передачи радиосигналов в километровом, метровом, дециметровом и сантиметровом диапазонах электромагнитных волн. Технический результат: расширение функциональных возможностей модуля КАУ АНПА за счет осуществления управления АНПА и передачи информации при нахождении АНПА как в надводном, так и в подводном положении и, кроме того, повышение технологичности обслуживания модуля КАУ в составе АНПА. Модуль комплексного антенного устройства радиоэлектронных средств АНПА содержит функционально связанные с приборной частью соответствующих радиоэлектронных средств антенну спутниковой навигационной системы (СНС), антенну спутниковой системы связи (ССС) и антенну УКВ-модема, а также антенну обнаружения радиоэлектронных сигналов (ОРС), установленную на конце антенной мачты выдвижного подъемно-мачтового устройства с возможностью подъема антенной мачты вверх перпендикулярно продольной оси АНПА. Приборная часть соответствующих радиоэлектронных средств модуля КАУ и подъемно-мачтовое устройство размещены в вертикальном кормовом стабилизаторе АНПА. В модуле КАУ дополнительно размещены буксируемая кабельная радиоантенна (БКРА), выполненная с положительной плавучестью, антенна GSM-модема, антенна модема подводной радиосвязи для связи с подводной стационарной установкой (ПСУ). Верхняя часть вертикального кормового стабилизатора выполнена в виде каплевидного обтекателя, а нижняя часть стабилизатора выполнена в виде поддона по форме, идентичной форме посадочного места, выполненного в корпусе АНПА для установки и крепления на нем модуля КАУ с возможностью съема всего модуля с посадочного места. Приборная часть радиоэлектронных средств модуля КАУ дополнительно содержит функционально связанные между собой блоки усиления и согласования сигналов антенн, коммутатор, ЦАП, АЦП и устройство управления КАУ. Приборная часть размещена в герметичном корпусе, который установлен на поддоне в модуле КАУ, а устройство управления приборной частью модуля КАУ функционально соединено с системой бортового управления и навигации (СБУН) АНПА. Подъемно-мачтовое устройство, на антенной мачте которого установлена антенна обнаружения радиоэлектронных сигналов (ОРС), размещено на поддоне в модуле КАУ и снабжено электроприводом в герметичном исполнении, причем антенная мачта установлена в модуле КАУ с возможностью подъема антенны ОРС выше корпуса обтекателя. В носовой части обтекателя модуля КАУ выполнена антенная платформа, на которой установлены антенны УКВ-модема, GSM-модема, ССС и СНС. В кормовой части обтекателя установлена антенна модема подводной радиосвязи для связи с ПСУ. В кормовой оконечности корпуса обтекателя вдоль его продольной оси размещено также устройство для выпуска БКРА в море. БКРА размещена на барабане лебедки, снабженной электроприводом в герметичном исполнении, сама лебедка жестко установлена на поддоне в модуле КАУ, а между барабаном лебедки и устройством для выпуска БКРА в море установлен кабельный канал с возможностью перемещения по нему БКРА при выпуске ее в море или сматывании на барабан лебедки. 6 з.п. ф-лы, 12 ил.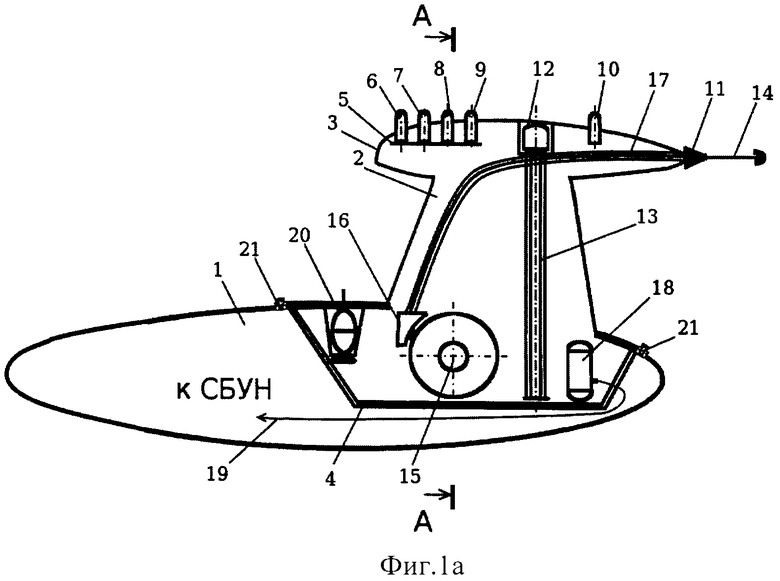
1. Модуль комплексного антенного устройства радиоэлектронных средств автономного необитаемого подводного аппарата (АНПА), содержащий функционально связанные с приборной частью соответствующих радиоэлектронных средств антенну спутниковой навигационной системы (СНС), антенну спутниковой системы связи (ССС) и антенну УКВ-модема, а также антенну обнаружения радиоэлектронных сигналов (ОРС), установленную на конце антенной мачты выдвижного подъемно-мачтового устройства с возможностью подъема антенной мачты вверх перпендикулярно продольной оси АНПА, причем приборная часть соответствующих радиоэлектронных средств комплексного антенного устройства (КАУ) и подъемно-мачтовое устройство размещены в вертикальном кормовом стабилизаторе АНПА, отличающийся тем, что в модуле комплексного антенного устройства дополнительно размещены буксируемая кабельная радиоантенна (БКРА), выполненная с положительной плавучестью, антенна GSM-модема, антенна модема подводной радиосвязи для связи с подводной стационарной установкой (ПСУ), а вертикальный кормовой стабилизатор АНПА использован в качестве модуля для формирования в нем КАУ, для чего верхняя часть вертикального кормового стабилизатора выполнена в виде каплевидного обтекателя, а нижняя часть стабилизатора выполнена в виде поддона по форме, идентичной форме посадочного места, выполненного в корпусе АНПА для установки и крепления на нем модуля КАУ с возможностью съема всего модуля с посадочного места, приборная часть радиоэлектронных средств модуля КАУ дополнительно содержит функционально связанные между собой блоки усиления и согласования сигналов антенн, коммутатор, ЦАП, АЦП и устройство управления КАУ и размещена в герметичном корпусе, который установлен на поддоне в модуле КАУ, а устройство управления приборной частью модуля КАУ функционально соединено с системой бортового управления и навигации (СБУН) АНПА, подъемно-мачтовое устройство, на антенной мачте которого установлена антенна обнаружения радиоэлектронных сигналов (ОРС), размещено на поддоне в модуле КАУ и снабжено электроприводом в герметичном исполнении, причем антенная мачта установлена в модуле КАУ с возможностью подъема антенны ОРС выше корпуса обтекателя, в носовой части обтекателя модуля КАУ выполнена антенная платформа, на которой установлены антенны УКВ-модема, GSM-модема, ССС и СНС, а в кормовой части обтекателя установлена антенна модема подводной радиосвязи для связи с ПСУ, причем в кормовой оконечности корпуса обтекателя вдоль его продольной оси размещено также устройство для выпуска БКРА в море, при этом БКРА размещена на барабане лебедки, снабженной электроприводом в герметичном исполнении, сама лебедка жестко установлена на поддоне в модуле КАУ, а между барабаном лебедки и устройством для выпуска БКРА в море установлен кабельный канал с возможностью перемещения по нему БКРА при выпуске ее в море или сматывании на барабан лебедки.
2. Устройство по п. 1, отличающееся тем, что съемное соединение модуля КАУ с посадочным местом на корпусе АНПА выполнено болтовым.
3. Устройство по п. 1, отличающееся тем, что антенна ОРС, установленная на конце антенной мачты ПМУ, размещена под радиопрозрачным сферическим колпаком.
4. Устройство по п. 1, отличающееся тем, что в качестве кабельного канала для БКРА использована труба.
5. Устройство по п. 1, отличающееся тем, что на выпускном конце БКРА установлено средство, обладающее гидродинамическим сопротивлением.
6. Устройство по п. 1, отличающееся тем, что антенна модема для связи с подводной стационарной установкой (ПСУ) выполнена рамочного типа.
7. Устройство по п. 1, отличающееся тем, что в поддоне модуля КАУ размещен аварийный радиобуй, снабженный электромагнитным держателем.
| Способ переработки свеклосахарной патоки на спирт | 1953 |
|
SU97569A1 |
| Способ управления подводным робототехническим комплексом по каналу связи | 2017 |
|
RU2656825C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ МОРСКОГО БАЗИРОВАНИЯ | 2016 |
|
RU2614864C9 |
| В.В | |||
| Костенко, О.Ю | |||
| Львов | |||
| Комбинированная система связи и навигации автономного подводного робота с поплавковым модулем | |||
| Подводные исследования и робототехника | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| US 8813669 B2, 26.08.2014 | |||
| US 5977918 A, 02.11.1999. | |||

