Изобретение относится к области автоматического управления и может быть использовано в самонастраивающихся системах автоматического управления электромеханическими, электротехническими, энергетическими, теплотехническими, механическими объектами, а также в информационно-измерительной технике для контроля и идентификации указанных объектов.
Известен способ идентификации линейного динамического объекта (Семёнов А.Д., Артамонов Д.В., Брюхачев А.В. Идентификация объектов управления: Учебное пособие. - Пенза: Изд-во Пензенского Гос. Университета, 2003. - 211 с. С. 102-108), в котором задают передаточную функцию объекта априорного вида в дробно-рациональной форме, в зависимости от времени итеративно формируют входные испытательные гармонические сигналы заданных амплитуд и частот, по отдельности подают их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, затем определяют вещественную и мнимую составляющие входного испытательного сигнала, определяют вещественную и мнимую составляющие выходного сигнала, далее определяют фазу выходного сигнала по отношению к входному испытательному сигналу, определяют базовую частоту входного испытательного сигнала, при которой фаза выходного сигнала по отношению к входному испытательному сигналу имеет граничную величину, далее в зависимости от базовой частоты определяют испытательные частоты входных испытательных гармонических сигналов, затем в зависимости от времени формируют входные испытательные гармонические сигналы заданных амплитуд и испытательных частот, по отдельности подают их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал, накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, затем определяют вещественную и мнимую составляющие входного испытательного сигнала, определяют вещественную и мнимую составляющие выходного сигнала, далее составляют систему уравнений в зависимости от коэффициентов передаточной функции априорного вида, испытательных частот входных испытательных сигналов, вещественных и мнимых составляющих входных испытательных сигналов, вещественных и мнимых составляющих выходных сигналов, решают ее и определяют коэффициенты передаточной функции, причем линейный динамический объект должен быть устойчивым, передаточную функцию априорного вида задают таким образом, что она достаточна для описания линейного динамического объекта, амплитуды входных испытательных сигналов задают таким образом, чтобы при их воздействии объект обладал линейностью, отсчеты входных испытательных сигналов и отсчеты выходных сигналов накапливают на интервалах периодов входных испытательных сигналов, граничную величину фазы задают в зависимости от передаточной функции априорного вида, а количество испытательных частот определяют в зависимости от числа коэффициентов передаточной функции априорного вида.
Недостатком данного технического решения является итеративное и продолжительное по времени определение базовой частоты входного испытательного сигнала.
Известен также способ идентификации линейного динамического объекта (Солодовников В.В. Теория автоматического регулирования. Кн. 2. М.: Машиностроение, 1967 - 680 с. С. 94-105), в котором задают передаточную функцию объекта априорного вида в дробно-рациональной форме, в зависимости от времени итеративно формируют входные испытательные периодические двухполярные сигналы прямоугольной формы заданных амплитуд и частот, по отдельности подают их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал, накапливают его отсчеты, затем определяют вещественную и мнимую составляющие первой гармоники входного испытательного сигнала, определяют вещественную и мнимую составляющие первой гармоники выходного сигнала, далее определяют фазу первой гармоники выходного сигнала по отношению к первой гармонике входного испытательного сигнала, определяют базовую частоту входного испытательного сигнала, при которой фаза первой гармоники выходного сигнала по отношению к первой гармонике входного испытательного сигнала имеет граничную величину, затем в зависимости от времени формируют входной испытательный периодический двухполярный сигнал прямоугольной формы заданной амплитуды и базовой частоты, подают его на вход линейного динамического объекта, достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, затем определяют вещественные и мнимые составляющие гармоник входного испытательного сигнала, определяют вещественные и мнимые составляющие гармоник выходного сигнала, далее составляют систему уравнений в зависимости от коэффициентов передаточной функции априорного вида, частот гармоник входного испытательного сигнала, вещественных и мнимых составляющих гармоник входного испытательного сигнала, вещественных и мнимых составляющих гармоник выходного сигнала, решают ее и определяют коэффициенты передаточной функции, причем линейный динамический объект должен быть устойчивым, передаточную функцию априорного вида задают таким образом, что она достаточна для описания линейного динамического объекта, амплитуды входных испытательных сигналов задают таким образом, чтобы при их воздействии объект обладал линейностью, отсчеты входных испытательных сигналов и отсчеты выходных сигналов накапливают на интервалах периодов входных испытательных сигналов, граничную величину фазы задают в зависимости от передаточной функции априорного вида, а количество гармоник определяют в зависимости от числа коэффициентов передаточной функции априорного вида.
Недостатком данного технического решения является итеративное и продолжительное по времени определение базовой частоты входного испытательного сигнала.
Наиболее близким по технической сущности к заявляемому изобретению является способ идентификации линейного динамического объекта (Дейч A.M. Методы идентификации динамических объектов. - М.: Энергия, 1979. - 240 с. С. 50-58), в котором задают передаточную функцию объекта априорного вида в дробно-рациональной форме, в зависимости от времени итеративно формируют входные испытательные периодические двухполярные сигналы прямоугольной формы заданных амплитуд и частот, по отдельности подают их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, затем определяют вещественную и мнимую составляющие первой гармоники входного испытательного сигнала, определяют вещественную и мнимую составляющие первой гармоники выходного сигнала, далее определяют фазу первой гармоники выходного сигнала по отношению к первой гармонике входного испытательного сигнала, определяют базовую частоту входного испытательного сигнала, при которой фаза первой гармоники выходного сигнала по отношению к первой гармонике входного испытательного сигнала имеет граничную величину, далее в зависимости от базовой частоты определяют испытательные частоты входных испытательных периодических двухполярных сигналов прямоугольной формы, затем в зависимости от времени формируют входные испытательные сигналы заданных амплитуд и испытательных частот, по отдельности подают их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, затем определяют вещественную и мнимую составляющие первой гармоники входного испытательного сигнала, определяют вещественную и мнимую составляющие первой гармоники выходного сигнала, далее составляют систему уравнений в зависимости от коэффициентов передаточной функции априорного вида, испытательных частот входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник выходных сигналов, решают ее и определяют коэффициенты передаточной функции, причем линейный динамический объект должен быть устойчивым, передаточную функцию априорного вида задают таким образом, что она достаточна для описания линейного динамического объекта, амплитуды входных испытательных сигналов задают таким образом, чтобы при их воздействии объект обладал линейностью, отсчеты входных испытательных сигналов и отсчеты выходных сигналов накапливают на интервалах периодов входных испытательных сигналов, граничную величину фазы задают в зависимости от передаточной функции априорного вида, а количество испытательных частот определяют в зависимости от числа коэффициентов передаточной функции априорного вида.
Недостатком данного технического решения является итеративное и продолжительное по времени определение базовой частоты входного испытательного сигнала.
Технической задачей предлагаемого изобретения является упрощение определения базовой частоты входного испытательного сигнала.
Технический результат заключается в сокращении продолжительности идентификации линейного динамического объекта.
Это достигается тем, что в известном способе идентификации линейного динамического объекта, включающем задание передаточной функции объекта априорного вида в дробно-рациональной форме, определение базовой частоты входного испытательного сигнала, в зависимости от базовой частоты определение испытательных частот входных испытательных периодических двухполярных сигналов прямоугольной формы, в зависимости от времени формирование входных испытательных сигналов заданных амплитуд и испытательных частот, по отдельности подачу их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достижение установившегося колебательного движения объекта, в зависимости от времени измерение входного испытательного сигнала и накопление его отсчетов, в зависимости от времени измерение выходного сигнала и накопление его отсчетов, определение вещественной и мнимой составляющих первой гармоники входного испытательного сигнала, определение вещественной и мнимой составляющих первой гармоники выходного сигнала, составление системы уравнений в зависимости от коэффициентов передаточной функции априорного вида, испытательных частот входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник выходных сигналов, ее решение и определение коэффициентов передаточной функции, причем линейный динамический объект должен быть устойчивым, передаточную функцию априорного вида задают таким образом, что она достаточна для описания линейного динамического объекта, амплитуды входных испытательных сигналов задают таким образом, чтобы при их воздействии объект обладал линейностью, отсчеты входных испытательных сигналов и отсчеты выходных сигналов накапливают на интервалах периодов входных испытательных сигналов, а количество испытательных частот определяют в зависимости от числа коэффициентов передаточной функции априорного вида, при этом для определения базовой частоты в зависимости от времени однократно формируют входной испытательный сигнал ступенчатого вида заданной величины, подают его на вход линейного динамического объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, далее определяют продолжительность неустановившегося движения, затем определяют базовую частоту входного испытательного периодического сигнала прямоугольной формы в зависимости от продолжительности неустановившегося движения, причем величину входного испытательного сигнала ступенчатого вида задают таким образом, чтобы при его воздействии объект обладал линейностью.
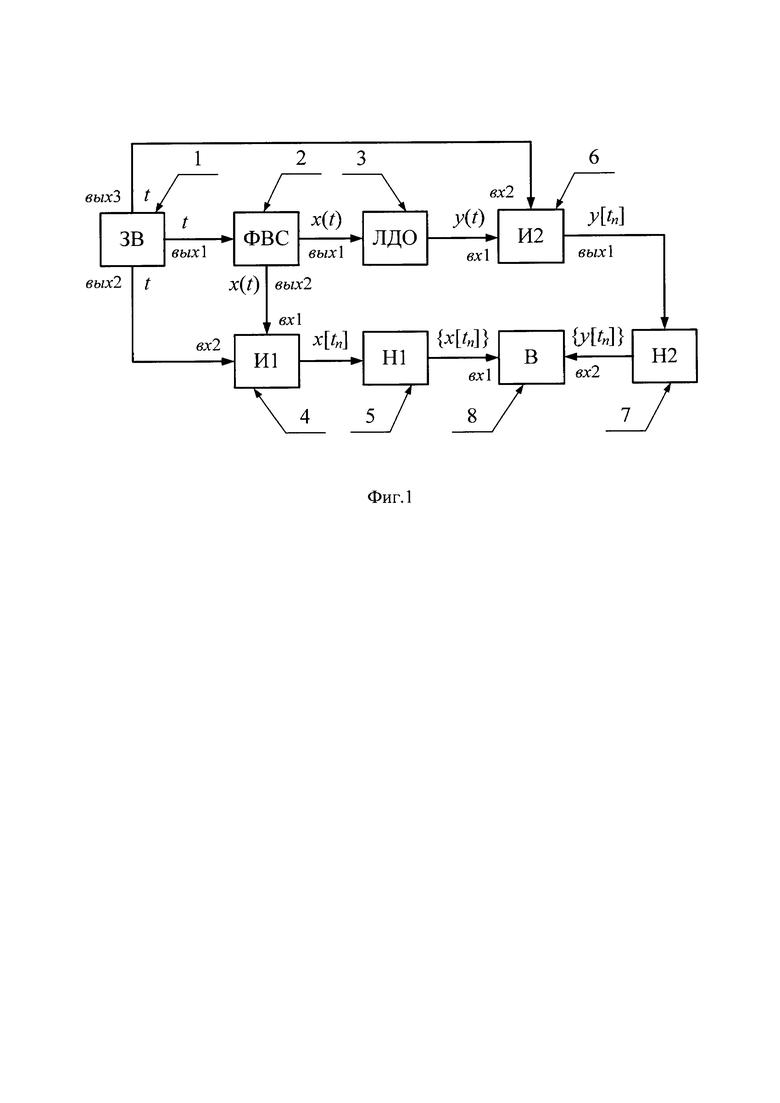
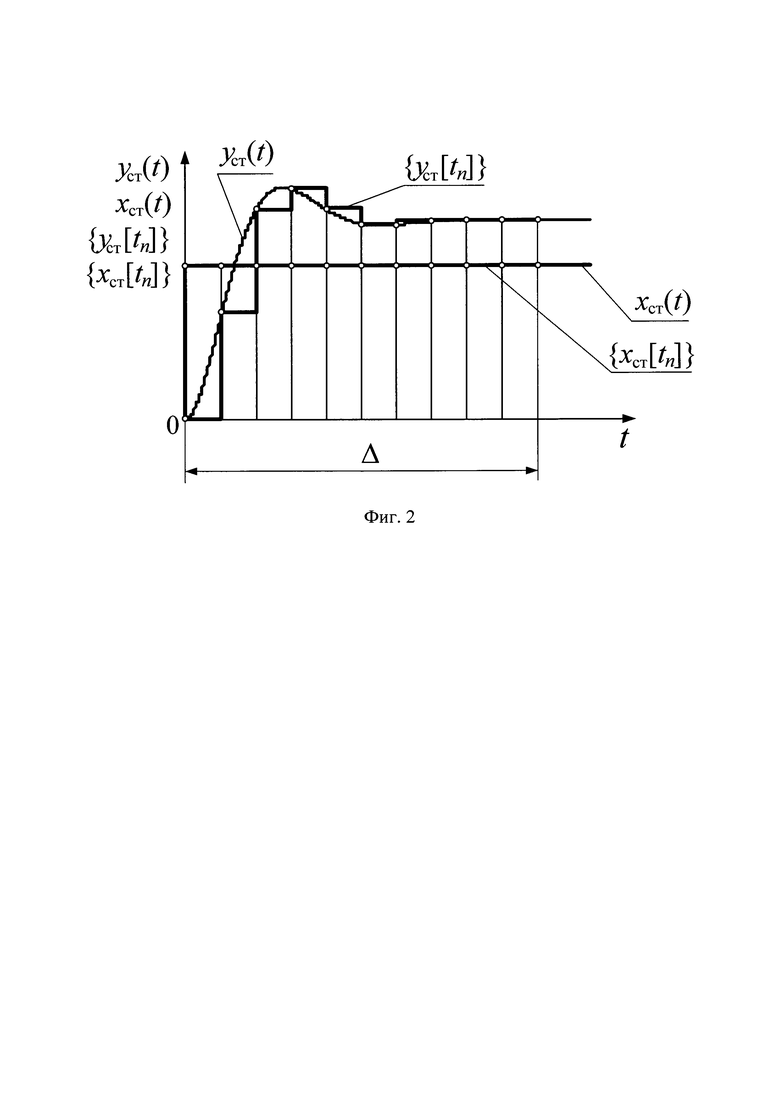
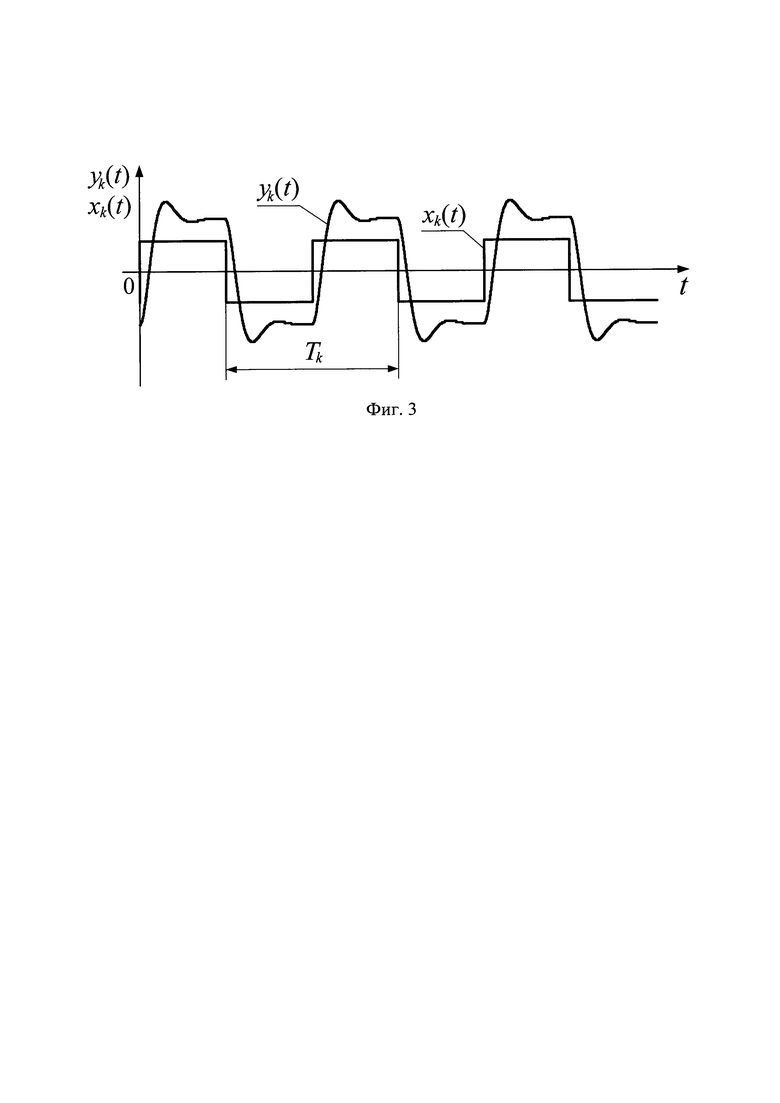
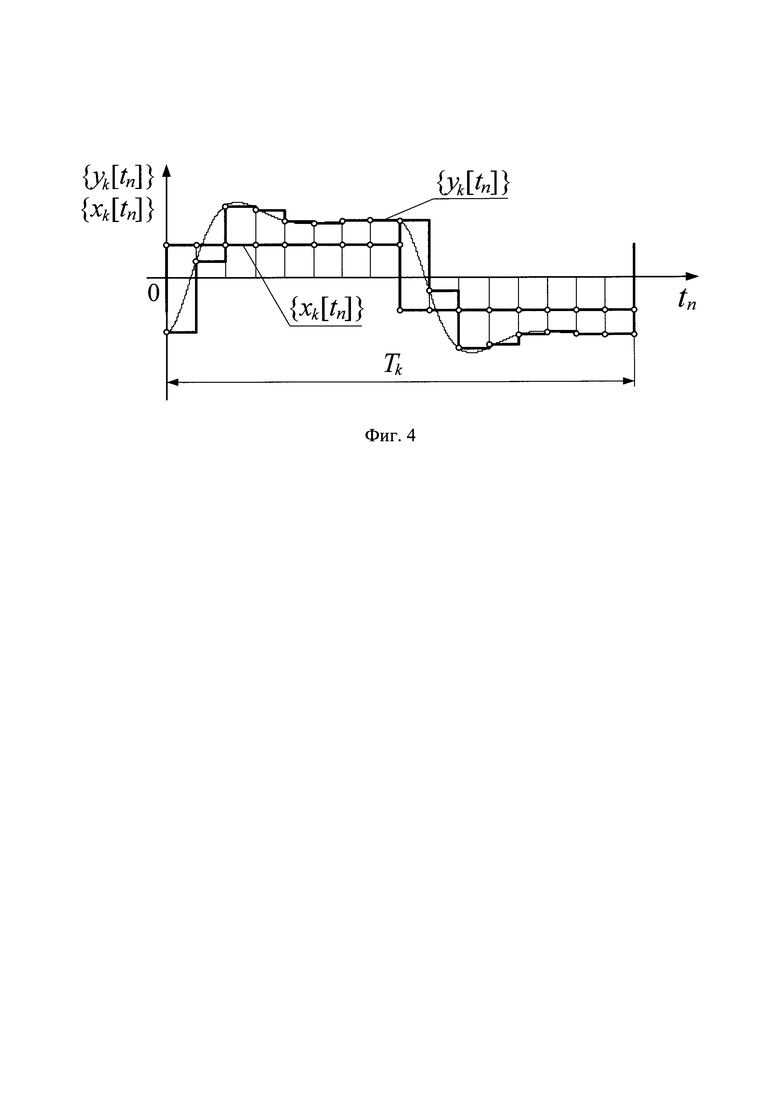
Сущность предлагаемого технического решения поясняется чертежами, где на фиг. 1 изображена функциональная схема устройства, реализующего заявленный способ идентификации линейного динамического объекта, на фиг. 2 изображены временные диаграммы входного испытательного сигнала ступенчатого вида и выходного сигнала линейного динамического объекта при действии на объект этого входного сигнала, на фиг. 3 изображены временные диаграммы входного испытательного периодического двухполярного сигнала прямоугольной формы и выходного сигнала линейного динамического объекта при действии на объект этого входного сигнала и достижении установившегося колебательного движения, на фиг. 4 показаны временные диаграммы измерения входного испытательного сигнала в зависимости от времени и измерения выходного сигнала в зависимости от времени на интервале периода входного испытательного сигнала.
На графических изображениях приняты следующие обозначения: Δ - измеренная длительность неустановившегося движения; t - время; tn - n-ый отсчет времени; x(t) - входной сигнал линейного динамического объекта в зависимости от времени; y(t) - выходной сигнал линейного динамического объекта в зависимости от времени при воздействии входного сигнала x(t); x[tn] - n-ый отсчет входного сигнала x(t) в зависимости от времени; y[tn] - n-ый отсчет выходного сигнала y(t) в зависимости от времени; {х[tn]} - массив отсчетов входного сигнала x(t) в зависимости от времени; {y[tn]} - массив отсчетов выходного сигнала y(t) в зависимости от времени; xст(t) - входной испытательный сигнал ступенчатого вида; yст(t) - выходной сигнал линейного динамического объекта в зависимости от времени при воздействии входного испытательного сигнала xст(t); xст[tn] - n-ый отсчет входного испытательного сигнала хст(t) в зависимости от времени; yст[tn] - n-ый отсчет выходного сигнала yст(t) в зависимости от времени; xk(t) - входной испытательный сигнал k-той испытательной частоты ƒk в зависимости от времени; yk(t) - выходной сигнал линейного динамического объекта в зависимости от времени при воздействии входного испытательного сигнала xk(t); Tk - период входного испытательного сигнала xk(t) k-той испытательной частоты ƒk; xk[tn] - n-ый отсчет входного испытательного сигнала xk(t) в зависимости от времени; yk[tn] - n-ый отсчет выходного сигнала yk(t) в зависимости от времени; {xст[tn]} - массив отсчетов входного сигнала xст(t) в зависимости от времени; {yст[tn]} - массив отсчетов выходного сигнала yст(t) в зависимости от времени; {xk[tn]} - массив отсчетов входного сигнала xk(t) в зависимости от времени; {yk[tn]} - массив отсчетов выходного сигнала yk(t) в зависимости от времени.
Устройство, реализующее предлагаемый способ идентификации линейного динамического объекта содержит задатчик времени (ЗВ) 1, первый выход которого соединен со входом формирователя входного сигнала (ФВС) 2, первый выход которого соединен со входом линейного динамического объекта (ЛДО) 3. Второй выход формирователя входного сигнала 2 соединен с первым входом первого измерителя (И1) 4, второй вход которого соединен со вторым выходом задатчика времени 1. Выход первого измерителя 4 соединен со входом первого накопителя (H1) 5, выход линейного динамического объекта 3 соединен с первым входом второго измерителя (И2) 6, второй вход которого соединен с третьим выходом задатчика времени 1. Первый выход второго измерителя 6 соединен со входом второго накопителя (Н2) 7, выход первого накопителя 5 соединен с первым входом вычислителя 8, второй вход которого соединен с выходом второго накопителя 7.
Линейный динамический объект 3 может иметь любую физическую реализацию, например, электромеханическую, электротехническую, энергетическую, теплотехническую, механическую. Формирователь входного сигнала 2 может быть любого типа, допустимого для соединения с линейным динамическим объектом 3. Первый измеритель 4 и второй измеритель 6 реализованы на основе измерительных устройств любого типа, допустимого для соединения с линейным динамическим объектом 3. Задатчик времени 1, первый накопитель 5, второй накопитель 7 и вычислитель 8 реализованы на основе программно-аппаратных средств вычислительной техники.
Реализация указанным устройством предлагаемого способа идентификации линейного динамического объекта осуществляется следующим образом.
Линейный динамический объект должен быть устойчивым, то есть обладать свойством возвращаться к равновесному состоянию после устранения воздействий, вызвавших отклонение от него.
В вычислительном алгоритме, который выполняет вычислитель 8, задают передаточную функцию W(p) априорного вида в дробно-рациональной форме:
где М - порядок полинома числителя передаточной функции априорного вида; Н - порядок полинома знаменателя передаточной функции априорного вида, причем М<Н; р - оператор Лапласа; {am} - коэффициенты числителя передаточной функции априорного вида, причем 0≤m≤М; {bh} - коэффициенты знаменателя передаточной функции априорного вида, причем 0≤h≤H, а коэффициент b0=1.
Передаточную функцию априорного вида задают таким образом, что она достаточна для описания линейного динамического объекта, то есть она априорно имеет достаточное для этого количество коэффициентов {am} и {bh}.
В зависимости от времени t задатчика времени 1 формирователь входного сигнала 2 формирует входной испытательный сигнал xст(t) ступенчатого вида:

где 1(t) - единичная ступенчатая функция; Хст - величина входного испытательного сигнала ступенчатого вида.
Величину Хст входного испытательного сигнала ступенчатого вида задают таким образом, чтобы при его воздействии объект обладал линейностью, то есть величина Хст заведомо не должна влиять на коэффициенты {am} и {bh} передаточной функции априорного вида (1).
Входной испытательный сигнал хст(t) ступенчатого вида подают на вход линейного динамического объекта 3. На фиг. 2 изображены временные диаграммы входного испытательного сигнала ступенчатого вида xст(t) и выходного сигнала yст(t) линейного динамического объекта при действии на объект этого входного сигнала, а также массивы отсчетов {хст[tn]} и {yст[tn]}.
При этом в функциональной схеме устройства, показанной на фиг. 1, имеют место следующие соотношения:


Первый измеритель 4 измеряет сигнал xст(t) в зависимости от времени t в виде дискретных отсчетов хст[tn], которые накапливает первый накопитель 5 в виде массива {хст[tn]}. Второй измеритель 6 измеряет выходной сигнал yст(t) линейного динамического объекта 3 в зависимости от времени t в виде дискретных отсчетов yст[tn], которые накапливает второй накопитель 7 в виде массива {yст[tn]}. Таким образом в зависимости от времени измеряют входной испытательный сигнал хст(t) и накапливают его отсчеты и в зависимости от времени измеряют выходной сигнал yст(t) и накапливают его отсчеты.
Далее определяют продолжительность неустановившегося движения Δ, когда измеренные отсчеты yст[tn] примерно равны между собой при нескольких последовательных значениях n при условии, что измеренные отсчеты хст[tn] примерно равны между собой при тех же последовательных значениях n. Затем в зависимости от продолжительности Δ определяют базовую частоту входного испытательного периодического сигнала:
Далее в зависимости от базовой частоты ƒб входного испытательного сигнала определяют K испытательных частот входных испытательных периодических сигналов прямоугольной формы:
где K - количество испытательных частот.
Количество K испытательных частот определяют в зависимости от числа коэффициентов передаточной функции априорного вида (1):

Затем в зависимости от времени t формируют входные испытательные периодические двухполярные сигналы прямоугольной формы заданной амплитуды и испытательной частоты ƒk:


где sign - функция знака; Xk - амплитуда k-го входного испытательного сигнала ступенчатой формы.
Амплитуды Xk входных испытательных сигналов задают таким образом, чтобы при их воздействии объект обладал линейностью, то есть величины амплитуд Xk заведомо не должны влиять на коэффициенты {am} и {bh} передаточной функции априорного вида (1).
Каждый из входных испытательных сигналов xk(t) по отдельности подают на вход линейного динамического объекта 3. На фиг. 3 изображены временные диаграммы входного испытательного периодического двухполярного сигнала прямоугольной формы xk(t), имеющего испытательную частоту ƒk, и выходного сигнала yk(t) линейного динамического объекта при действии на объект этого входного сигнала и достижении установившегося колебательного движения. При этом испытательные частоты ƒk испытательных периодических сигналов xk(t) прямоугольного вида связаны с периодами Tk этих сигналов следующим образом:
При этом в функциональной схеме устройства, показанной на фиг. 1, имеют место следующие соотношения:


Первый измеритель 4 измеряет сигнал xk(t) в зависимости от времени t в виде дискретных отсчетов xk[tn], как показано на фиг. 4. Эти отсчеты на интервале Tk периода k-го входного испытательного сигнала xk(t) накапливает первый накопитель 5 в виде массива {xk[tn]}. Второй измеритель 6 измеряет выходной сигнал yk(t) линейного динамического объекта 3 в зависимости от времени t в виде дискретных отсчетов yk[tn] периода входного испытательного сигнала xk(t), как показано на фиг. 4. Эти отсчеты на интервале Tk периода k-го входного испытательного сигнала xk(t) накапливает второй накопитель 7 в виде массива {yk[tn]}. Таким образом отсчеты входных испытательных сигналов xk(t) и отсчеты выходных сигналов yk(t) накапливают на интервалах периодов Tk входных испытательных сигналов.
Далее с помощью вычислителя 8 определяют вещественную Axk и мнимую Bxk составляющие первой гармоники входного испытательного сигнала:
где N - число отсчетов входного испытательного периодического сигнала прямоугольной формы на интервале его периода Tk, число отсчетов выходного сигнала на интервале периода Tk входного сигнала.
Число отсчетов N определяют следующим образом:
где q - целое положительное число.
Затем с помощью вычислителя 8 определяют вещественную Ayk и мнимую Byk составляющие первой гармоники выходного сигнала объекта:
Далее с помощью вычислителя 8 составляют систему из K уравнений в зависимости от коэффициентов передаточной функции априорного вида, испытательных частот входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник выходных сигналов линейного динамического объекта:
где b0=1; j - мнимая единица; Ak и Bk - частотные параметры:
Затем с помощью вычислителя 8 решают эту систему уравнений и, таким образом, идентифицируют коэффициенты {am} и {bh} передаточной функции W(p).
Достижение заявленного технического результата достигается следующим образом. Согласно заявленному способу для определения базовой частоты входного испытательного периодического двухполярного сигнала прямоугольной формы требуется одна итерация, занимающая интервал времени, равный продолжительности неустановившегося движения линейного динамического объекта Δ при однократной подаче на него испытательного сигнала ступенчатого вида. Этот интервал времени равен полупериоду входного испытательного сигнала, имеющего базовую частоту.
Использование изобретения позволяет сократить продолжительность идентификации линейного динамического объекта, в том числе в самонастраивающихся системах автоматического управления электромеханическими, электротехническими, энергетическими, теплотехническими, механическими объектами, а также в информационно-измерительной технике для контроля и идентификации указанных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ идентификации линейной динамической системы | 2018 |
|
RU2675281C1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ОБЪЕКТА УПРАВЛЕНИЯ | 1967 |
|
SU196965A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2014 |
|
RU2553459C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2715431C1 |
| СПОСОБ ДИСКРЕТНОЙ РЕГУЛИРОВКИ ФАЗЫ | 2002 |
|
RU2235413C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕАРИЗОВАННОГО ДИНАМИЧЕСКОГО ОБЪЕКТА | 2003 |
|
RU2256950C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНЫХ ОБЪЕКТОВ УПРАВЛЕНИЯ | 1994 |
|
RU2079870C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ | 1999 |
|
RU2169940C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ, ПРОШЕДШИХ МНОГОЛУЧЕВОЙ КАНАЛ СВЯЗИ | 2013 |
|
RU2544178C1 |
Изобретение относится к способу идентификации линейного динамического объекта. Для идентификации линейного динамического объекта задают передаточную функцию объекта априорного вида в дробно-рациональной форме, определяют базовую частоту входного испытательного сигнала, в зависимости от базовой частоты определяют испытательные частоты входных испытательных периодических двухполярных сигналов прямоугольной формы, в зависимости от времени формируют входные испытательные сигналы заданных амплитуд и испытательных частот, по отдельности подают их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, определяют вещественную и мнимую составляющие первой гармоники входного испытательного сигнала, определяют вещественную и мнимую составляющие первой гармоники выходного сигнала, составляют систему уравнений в зависимости от коэффициентов передаточной функции априорного вида, испытательных частот входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник выходных сигналов, решают ее и определяют коэффициенты передаточной функции определенным образом. Обеспечивается сокращение продолжительности идентификации линейного динамического объекта. 4 ил.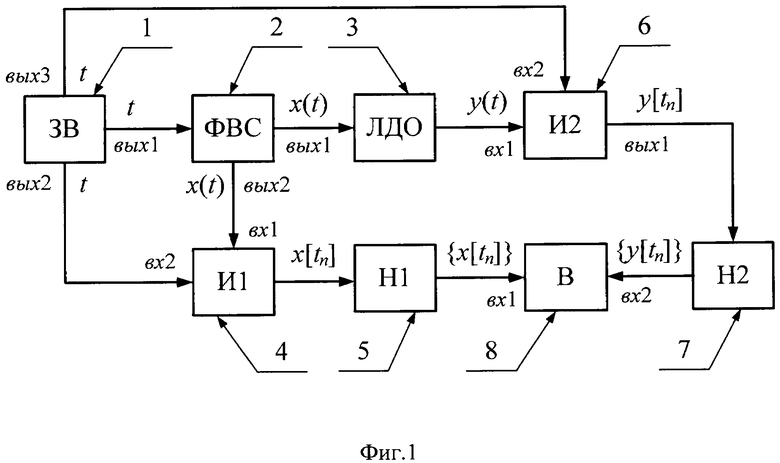
Способ идентификации линейного динамического объекта, в котором задают передаточную функцию объекта априорного вида в дробно-рациональной форме, определяют базовую частоту входного испытательного сигнала, в зависимости от базовой частоты определяют испытательные частоты входных испытательных периодических двухполярных сигналов прямоугольной формы, в зависимости от времени формируют входные испытательные сигналы заданных амплитуд и испытательных частот, по отдельности подают их на вход линейного динамического объекта, при воздействии каждого из входных испытательных сигналов достигают установившегося колебательного движения объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, определяют вещественную и мнимую составляющие первой гармоники входного испытательного сигнала, определяют вещественную и мнимую составляющие первой гармоники выходного сигнала, составляют систему уравнений в зависимости от коэффициентов передаточной функции априорного вида, испытательных частот входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник входных испытательных сигналов, вещественных и мнимых составляющих первых гармоник выходных сигналов, решают ее и определяют коэффициенты передаточной функции, причем линейный динамический объект должен быть устойчивым, передаточную функцию априорного вида задают таким образом, что она достаточна для описания линейного динамического объекта, амплитуды входных испытательных сигналов задают таким образом, чтобы при их воздействии объект обладал линейностью, отсчеты входных испытательных сигналов и отсчеты выходных сигналов накапливают на интервалах периодов входных испытательных сигналов, а количество испытательных частот определяют в зависимости от числа коэффициентов передаточной функции априорного вида, отличающийся тем, что для определения базовой частоты в зависимости от времени однократно формируют входной испытательный сигнал ступенчатого вида заданной величины, подают его на вход линейного динамического объекта, в зависимости от времени измеряют входной испытательный сигнал и накапливают его отсчеты, в зависимости от времени измеряют выходной сигнал и накапливают его отсчеты, далее определяют продолжительность неустановившегося движения, затем определяют базовую частоту входного испытательного периодического сигнала прямоугольной формы в зависимости от продолжительности неустановившегося движения, причем величину входного испытательного сигнала ступенчатого вида задают таким образом, чтобы при его воздействии объект обладал линейностью.
| Способ идентификации линейной динамической системы | 2018 |
|
RU2675281C1 |
| Станок с круглой пилой для спиливания свай и т.п. под водой | 1928 |
|
SU10600A1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1995 |
|
RU2097818C1 |
| CN 0102866629 B, 11.02.2015 | |||
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2012 |
|
RU2486563C1 |

