Изобретение относится к области авиации, а именно к устройствам управления летательными аппаратами (ЛА) вертикального взлета и посадки - мультикоптерам с помощью рукояти - джойстика.
Из уровня техники известно, что классическим общепринятым органом управления квадрокоптерами, октокоптерами и другими вариациями мультикоптеров, как беспилотных, так и пилотируемых, является пульт с двумя манипуляторами (далее стиками), которые способны смещаться (отклоняться) по горизонтали и вертикали, под воздействием больших пальцев пилота. Большой палец левой руки управляет левым стиком, большой палец правой руки - правым.
В качестве инструмента управления по рысканию и усилению газа применяются отклонения левого стика под большим пальцем левой руки по горизонтали и вертикали соответственно. Для управления по крену и тангажу - аналогичные манипуляции производятся правым стиком под правым большим пальцем.
Из уровня техники известен пульт управления (см. патент РФ 164240 на полезную модель, опубл. 20.08.2016).
Пульт управления состоит из корпуса с электронными блоками, на котором внизу слева и справа размещены два полиджойстика, закрепленных на корпусе, а вверху размещен дисплей, встроенный в корпус.
Недостатком известного из уровня техники управления ЛА является отсутствие возможности у пилота крепко держаться разведенными в стороны руками за какие-либо рукояти для сопротивления угловым перегрузкам в полете.
Из уровня техники известно устройство - полиджойстик для гиперманевренного управления (см. патент РФ 2497177 на изобретение, опубл. 27.10.2013).
Устройство содержит не менее двух ручек управления, в верхней части которых установлен, по меньшей мере, один министик, а средняя часть имеет форму, адаптированную для охвата кистью руки, отличающееся тем, что каждая ручка управления выполнена в виде фигуры, от верхней части которой отходит в сторону или огибает ручку управления фигурная полка, на которой установлено не менее одного министика, а в нижней части места отхода фигурной полки от средней части ручки управления установлен, по крайней мере, еще один министик.
Недостатками известного из уровня техники устройства являются:
- неудобство пользования, так как руки пилота быстро устают;
- сложность или невозможность управления аппаратом, совершающим маневры с высокими перегрузками.
Техническими результатами заявленного изобретения являются:
- удобство и облегчение управлением ЛА с помощью жестко фиксированных рукоятей для рук пилота на корпусе ЛА, увеличение стабильности положения пилота во время полета;
- возможность применения пилотом широкого хвата;
- увеличение безопасности пилотирования;
- способность сопротивляться перегрузкам в критических ситуациях.
Технические результаты достигаются тем, что устройство для управления пилотируемым летательным аппаратом вертикального взлета и посадки включает:
- две рукояти - джойстика, жестко зафиксированных на корпусе летательного аппарата;
- две платформы, закрепленные болтами перпендикулярно к боковым сторонам рукоятей соответственно с помощью металлических пластин, закрепленных болтами к оборотным сторонам платформ относительно пилота и стеков таким образом, чтобы большие пальцы левой и правой рук пилота ложились на стики платформ максимально комфортно для пилота, при этом в металлических пластинах выполнены прорези, позволяющие смещать платформы для наибольшего комфорта пилота;
- два стека, закрепленные с лицевой стороны по центру платформ относительно пилота на шарнирах с возможностью отклонения в плоскости платформ в любую сторону (по горизонтали и вертикали);
- тумблер для экстренного отключения устройства в случае возникновения нештатных ситуаций, расположенный под указательным пальцем пилота, либо в другом удобном для пилота месте;
- бортовой летный компьютер, выполненный с возможностью управления электродвигателями несущих винтов посредством стеков.
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами (см. фигуры 1 - 2), где показано следующее.
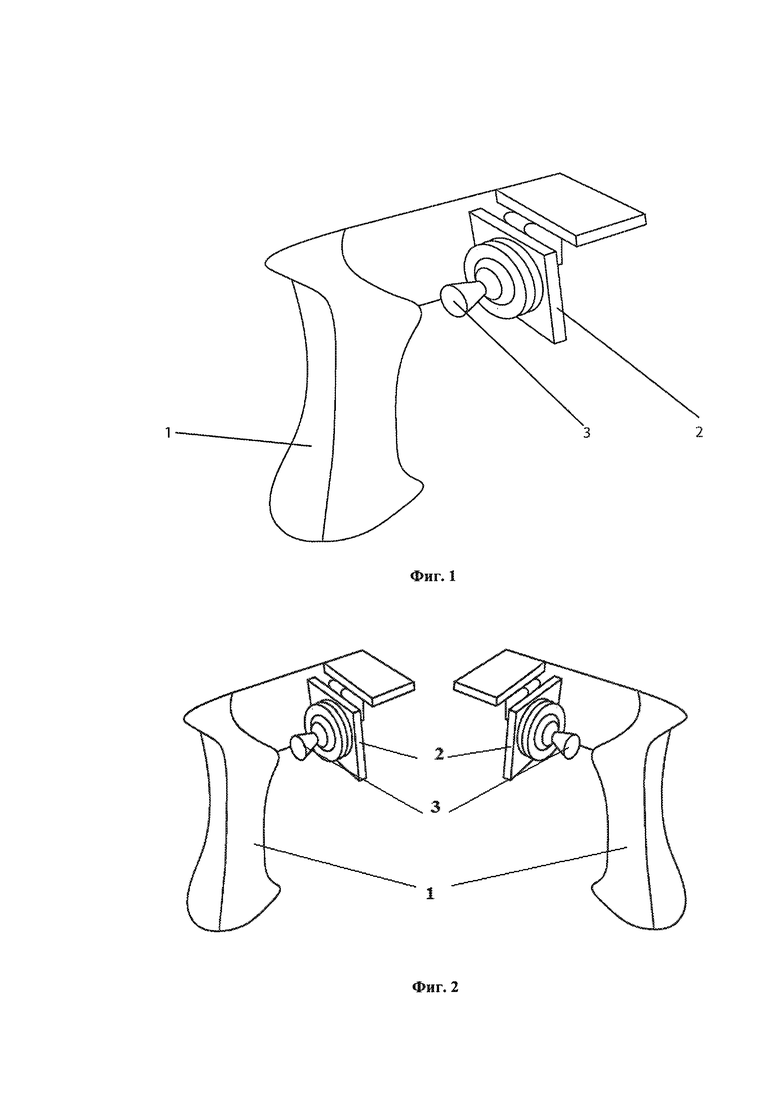
На фиг. 1 - пример рукояти - джойтика с платформой и стиком под левую руку пилота, вид сбоку.
На фиг. 2 - пример заявленного устройства для управления пилотируемым летательным аппаратом вертикального взлета и посадки в виде двух рукоятей - джойстиков с платформами и стиками.
На фигурах 1 и 2 обозначено следующее:
1 – рукояти - джойстики, жестко закрепленные на корпусе ЛА;
2 - платформы, закрепленные на рукояти с боковой стороны;
3 - стики платформ, отклоняющиеся по горизонтали и вертикали.
Форма рукояти (1) джойстика (см. фигуры 1 и 2) схожа с рукоятью пистолета. Рукояти (1) выполнены из карбона или иного прочного материала. Нижняя часть рукояти (1) выполнена с возможностью жесткой фиксации на корпусе летательного аппарата. Для полного управления ЛА используются две рукояти (1) со стиками (3) для левой и правой руки пилота.
Стики (3) представляют из себя металлические манипуляторы диаметром до 1 см и длиной от 2 см, закрепленные по центру платформ (2) на шарнире и отклоняющиеся в плоскости платформ (2) в любую сторону (по горизонтали и вертикали).
Платформы (2) - металлические основания стиков (3) снабжены металлическими пластинами и жестко закреплены посредством болтов перпендикулярно рукояти (1) с одной из ее боковых сторон под большой палец пилота таким образом, чтобы большие пальцы пилота прилегали на стики максимально комфортно для пилота.
В металлических пластинах выполнены прорези, позволяющие смещать и фиксировать платформы (2) со стиками (3) в удобном положении под кисти рук пилота.
Тумблер (не показан) для экстренного отключения устройства в случае возникновения нештатных ситуаций расположен под указательным пальцем пилота, либо в другом удобном для пилота месте, например, на платформе (2) в области стиков (3) или на рукояти (1).
Бортовой летный компьютер (не показан) выполнен с возможностью управления электродвигателями несущих винтов ЛА посредствам стиков (3).
Заявленное устройство управления ЛА обладает следующими преимуществами по сравнению с известными из уровня техники аналогами: облегчение, удобство и безопасность управления ЛА с помощью двух жестко закрепленных на корпусе ЛА рукоятей (1), руки пилота полностью обхватывают их (прилегается вся ладонь), при этом большие пальцы правой и левой руки пилота легко управляют стиками (3) без изменений площади соприкосновения ладони с рукоятью (1). Крепко держась обеими руками за жестко зафиксированные на корпусе Л А рукояти (1) пилот удерживает себя в полете от смещений, виражей и перегрузок, что невозможно в известных аналогах, где в перегрузках управление будет затруднено необходимостью производить манипуляции кистью рук, теряя таким образом, надежность точки опоры в руках пилота.
Проведенный анализ уровня техники позволил установить: аналоги с совокупностью существенных признаков, тождественных и идентичных существенным признакам заявленному устройству, отсутствуют, что указывает на соответствие заявленного устройства условию патентоспособности «новизна».
Результаты поиска известных решений с целью выявления существенных признаков, совпадающих с отличительными от аналогов существенными признаками заявленного устройства, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных существенных признаков на указанный автором технические результаты. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
На данный момент изготовлен опытный образец и успешно проведены испытания мультикоптера под управлением рукоятей со стиками.
Изобретение относится к области авиации, а именно к устройствам управления пилотируемыми летательными аппаратами (ЛА) вертикального взлета и посадки – мультикоптерами. Устройство для управления пилотируемым летательным аппаратом вертикального взлета и посадки включает две рукояти - джойстика, жестко зафиксированные на корпусе летательного аппарата, две платформы, закрепленные перпендикулярно к боковым сторонам рукоятей с помощью металлических пластин, закрепленных к оборотным сторонам платформ относительно пилота и стиков таким образом, чтобы большие пальцы левой и правой рук пилота ложились на стики, При этом в металлических пластинах выполнены прорези, позволяющие смещать платформы для наибольшего комфорта пилота. Два стика закреплены с лицевой стороны по центру платформ относительно пилота на шарнирах с возможностью отклонения в плоскости платформ в любую сторону. Устройство также содержит тумблер для экстренного отключения устройства, бортовой летный компьютер, выполненный с возможностью управления электродвигателями несущих винтов посредством стиков. Обеспечивается облегчение управлением ЛА с помощью жестко фиксированных рукоятей для рук пилота на корпусе ЛА, увеличение стабильности положения пилота во время полета. 2 ил.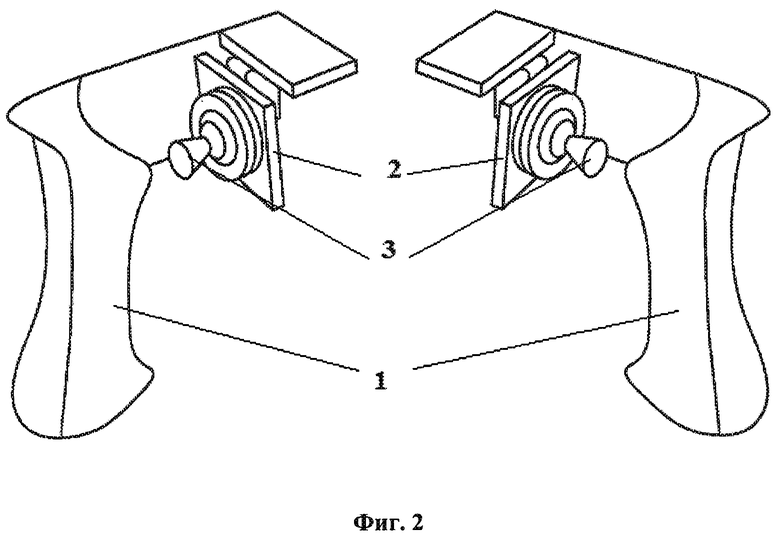
Устройство для управления пилотируемым летательным аппаратом вертикального взлета и посадки, включающее:
- две рукояти - джойстика, жестко зафиксированные на корпусе летательного аппарата;
- две платформы, закрепленные перпендикулярно к боковым сторонам рукоятей соответственно с помощью металлических пластин, закрепленных к оборотным сторонам платформ относительно пилота и стиков таким образом, чтобы большие пальцы левой и правой рук пилота ложились на стики платформ максимально комфортно для пилота, при этом в металлических пластинах выполнены прорези, позволяющие смещать платформы для наибольшего комфорта пилота;
- два стика, закрепленные с лицевой стороны по центру платформ относительно пилота на шарнирах с возможностью отклонения в плоскости платформ в любую сторону (по горизонтали и вертикали);
- тумблер для экстренного отключения устройства в случае возникновения нештатных ситуаций, расположенный под указательным пальцем пилота, либо в другом удобном для пилота месте;
- бортовой летный компьютер, выполненный с возможностью управления электродвигателями несущих винтов посредством стиков.
| Устройство для регулирования скорости клиноременного вариатора | 1955 |
|
SU114939A1 |
| РУКОЯТКА БОКОВОЙ РУЧКИ ОРГАНА УПРАВЛЕНИЯ | 2012 |
|
RU2638049C2 |
| УСТРОЙСТВО ВВОДА ИНФОРМАЦИИ - ПОЛИДЖОЙСТИК ДЛЯ ГИПЕРМАНЕВРЕННОГО УПРАВЛЕНИЯ | 2012 |
|
RU2497177C1 |
| WO 2016209697 A1, 29.12.2016 | |||
| US 4584510 A1, 22.04.1986. | |||

