Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способам направления по маршруту и устройствам направления по маршруту для направления транспортного средства по заданному маршруту.
Уровень техники
[0002] Патентная литература 1 раскрывает навигационное устройство, которое обеспечивает указание изменения полосы движения заранее, так что, даже когда имеется затор движения для правого поворота или левого поворота на множестве полос движения, продолжающихся в направлении движения транспортного средства-носителя на перекрестке, на котором транспортное средство-носитель собирается поворачивать направо или налево, транспортное средство-носитель может достигать окончания затора движения.
Список цитируемых источников
Патентная литература
[0003] Патентная литература 1: Публикация заявки на патент Японии № 2009-25235
Раскрытие изобретения
Техническая задача
[0004] К сожалению, в технологии, описанной в патентной литературе 1, если дорога после правого или левого поворота имеет множество полос движения, и затор движения продолжается, после правого или левого поворота может возникнуть помеха, состоящая в смене полосы движения во время затора движения, в зависимости от направления движения после правого или левого поворота.
[0005] В свете вышеописанной проблемы, задача настоящего изобретения состоит в создании способа направления по маршруту и устройства направления по маршруту, имеющих меньшую вероятность возникновения упомянутой помехи.
Решение задачи
[0006] Способ направления по маршруту согласно аспекту настоящего изобретения включает в себя: если на заданном маршруте от точки отправления до пункта назначения транспортного средства, дорога для движения в текущем положении транспортного средства имеет первое множество полос движения, а следующая дорога, следующая за ближайшей точкой ответвления от текущего положения, имеет второе множество полос движения, поиск точки ответвления-слияния, до которой полосы движения, отличные от полосы движения для достижения пункта назначения, из второго множества полос движения, исчезают; и если начальная точка затора движения находится дальше по ходу движения от точки ответвления-слияния, и конечная точка затора движения находится ближе по ходу движения от ближайшей точки ответвления, направление транспортного средства на полосу движения для достижения пункта назначения в качестве цели перед достижением конечной точки.
Полезные эффекты изобретения
[0007] Аспект настоящего изобретения предусматривает способ направления по маршруту и устройство направления по маршруту, имеющие меньшую вероятность возникновения помехи.
Краткое описание чертежей
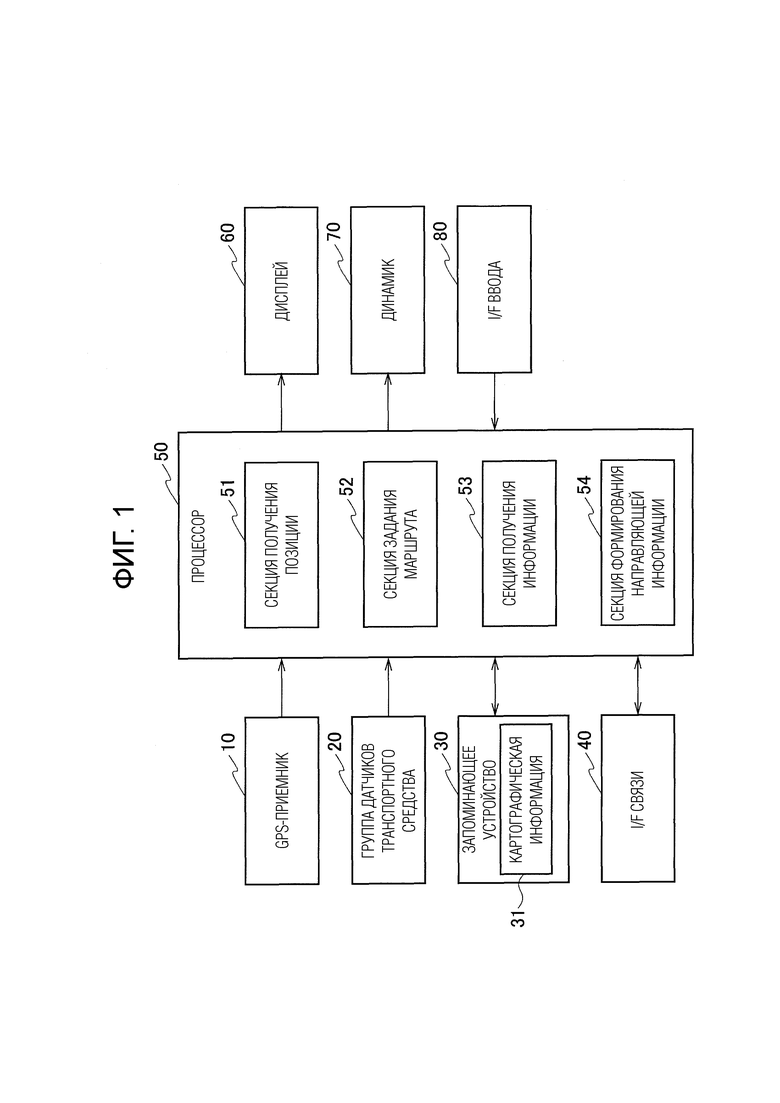
[0008] Фиг. 1 - это принципиальная блок-схема для объяснения основной структуры устройства направления по маршруту согласно варианту осуществления настоящего изобретения.
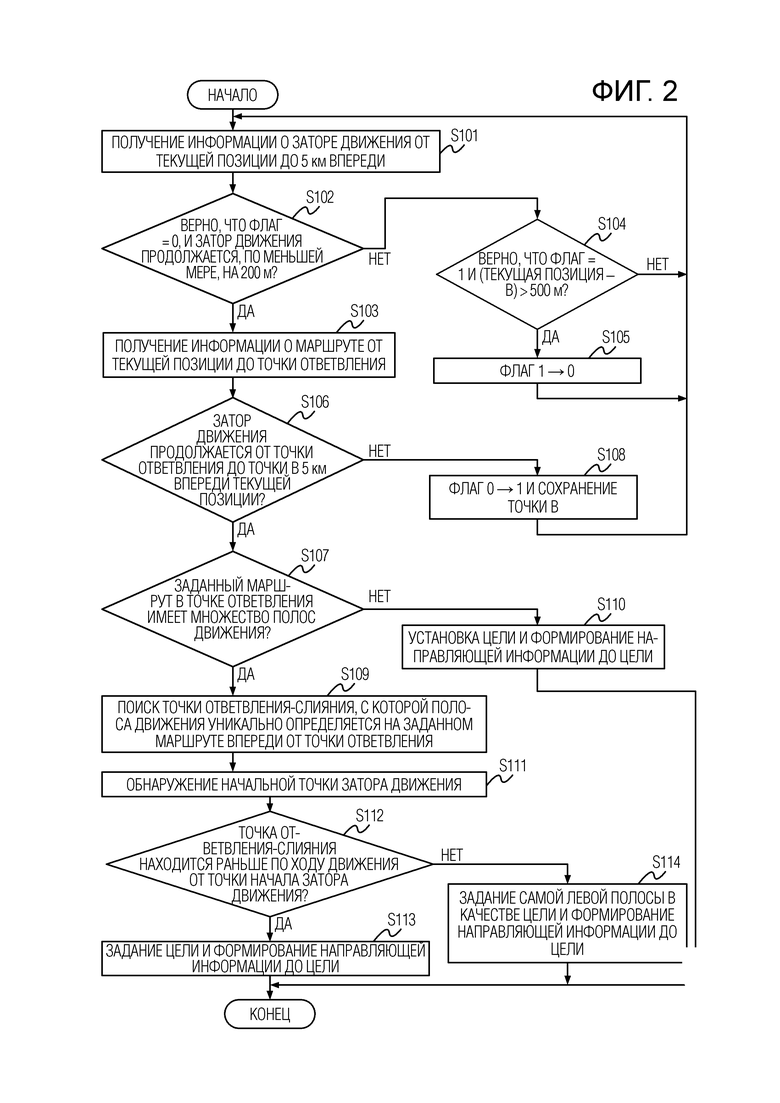
Фиг. 2 - это блок-схема для объяснения примера работы устройства направления по маршруту согласно варианту осуществления настоящего изобретения.
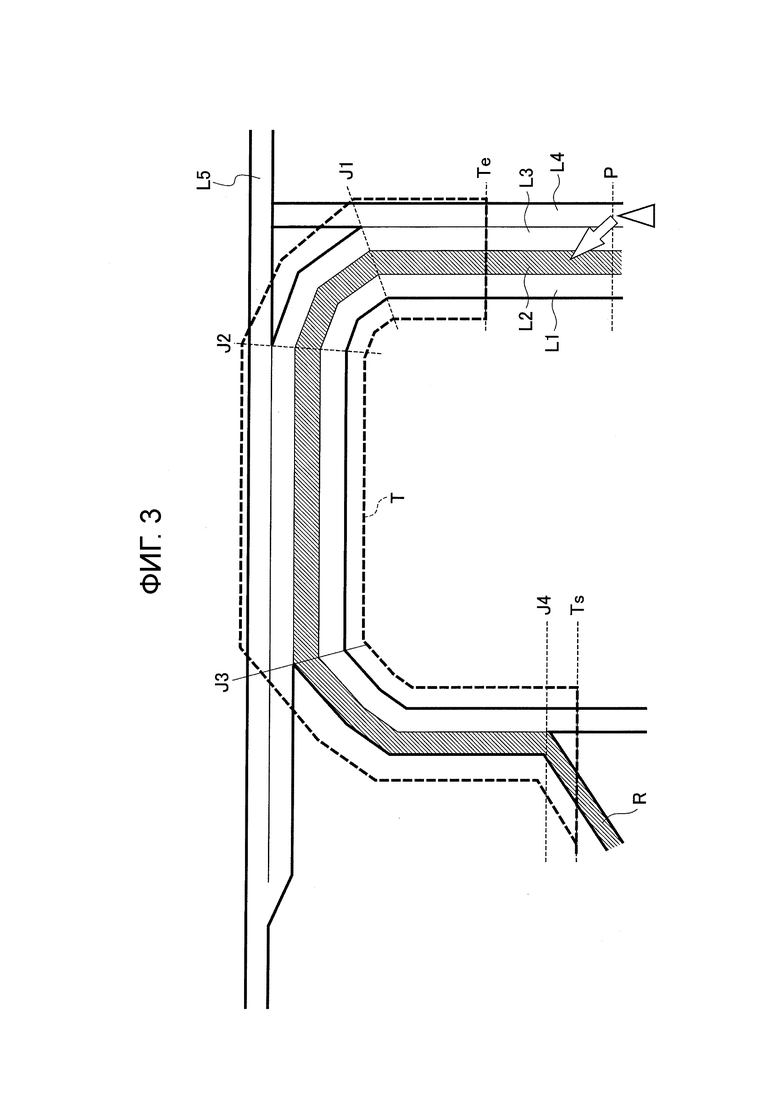
Фиг. 3 показывает пример, иллюстрирующий окружающую обстановку для заданного маршрута в случае, когда начальная точка затора движения находится дальше по ходу движения от точки ответвления-слияния на заданном маршруте.
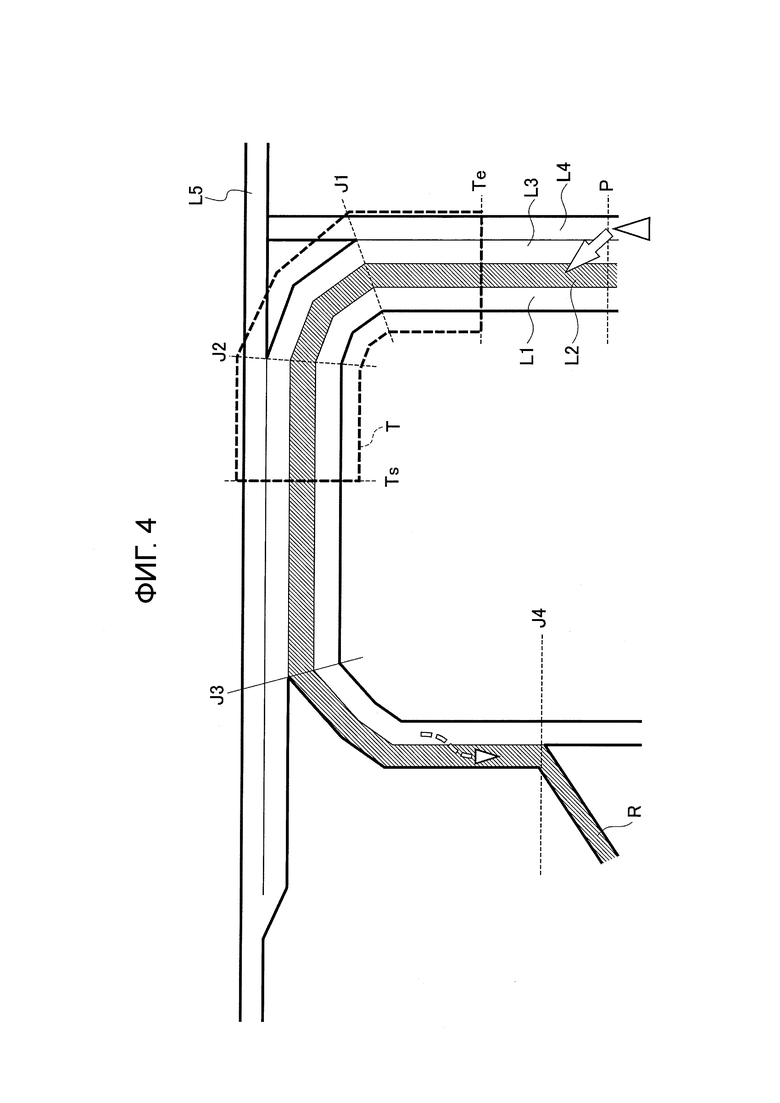
Фиг. 4 показывает пример, иллюстрирующий окружающую обстановку для заданного маршрута в случае, когда начальная точка затора движения находится ближе по ходу движения от точки ответвления-слияния на заданном маршруте.
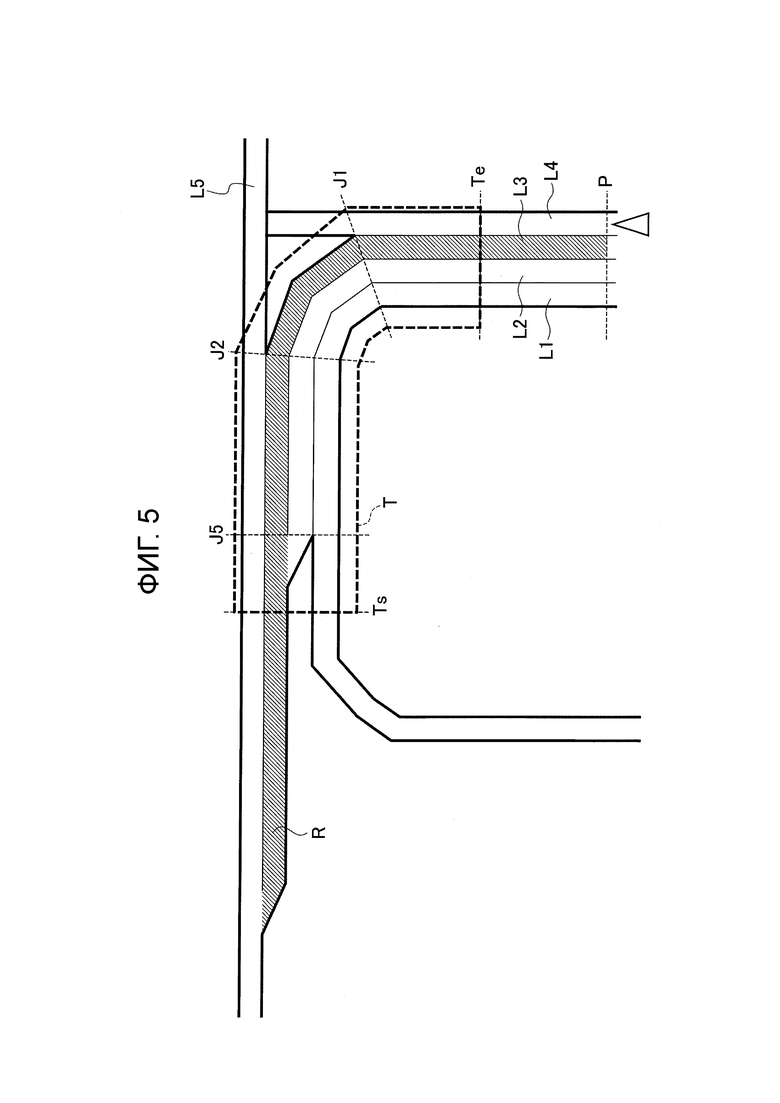
Фиг. 5 показывает пример, иллюстрирующий окружающую обстановку для заданного маршрута в случае, когда начальная точка затора движения находится дальше по ходу движения от точки, в которой число полос движения уменьшается, на заданном маршруте.
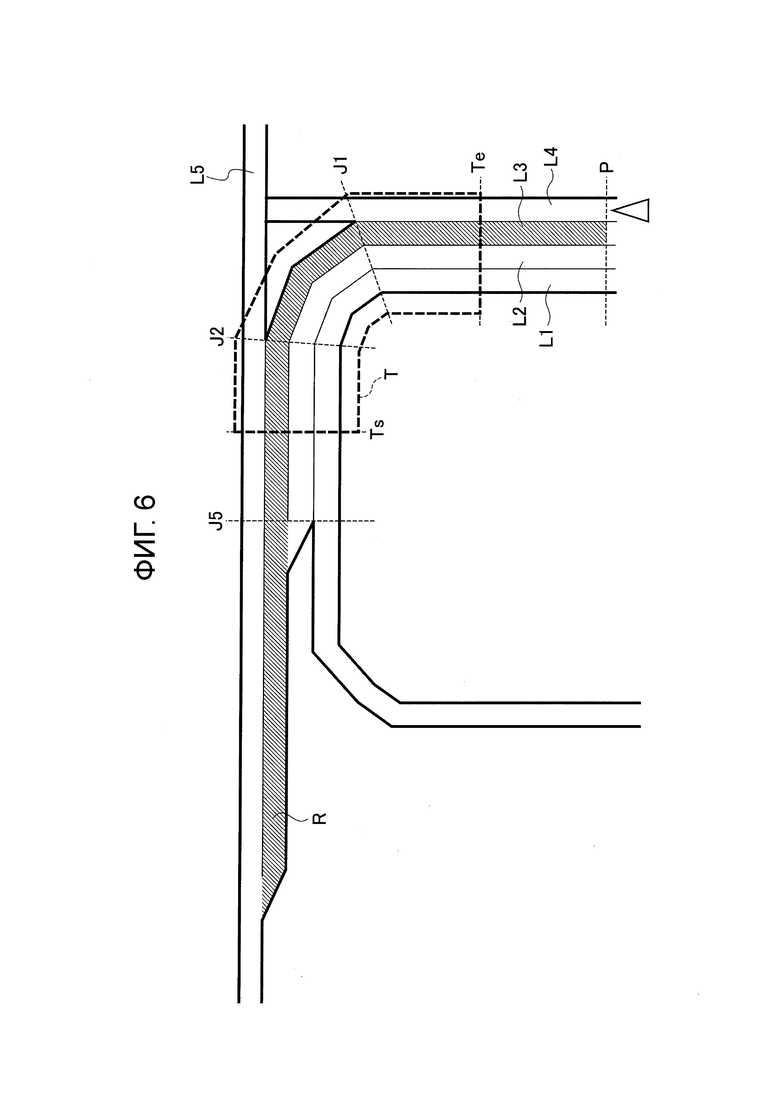
Фиг. 6 показывает пример, иллюстрирующий окружающую обстановку для заданного маршрута в случае, когда начальная точка затора движения находится ближе по ходу движения от точки, в которой число полос движения уменьшается, на заданном маршруте.
Осуществление изобретения
[0009] Со ссылкой на чертежи будет описан вариант осуществления настоящего изобретения. В иллюстрации чертежей одинаковые или аналогичные части обозначаются одинаковыми или аналогичными условными обозначениями, и описание таких частей будет пропущено.
[0010] Устройство направления по маршруту
Как иллюстрировано на фиг. 1, устройство направления по маршруту согласно этому варианту осуществления включает в себя GPS-приемник 10, группу датчиков 20 транспортного средства, запоминающее устройство 30, интерфейс (I/F) 40 связи, процессор 50, дисплей 60, динамик 70 и I/F 80 ввода. Устройство направления по маршруту согласно этому варианту осуществления устанавливается на транспортном средстве (транспортном средстве-носителе) и направляет транспортное средство так, что транспортное средство движется по заданному маршруту, заданному заранее.
[0011] GPS-приемник 10 является устройством позиционирования для измерения положения транспортного средства-носителя на земле, с помощью системы позиционирования, такой как система глобального позиционирования (GPS). GPS-приемник 10 последовательно выводит измеренные положения процессору 50.
[0012] Группа датчиков 20 транспортного средства получает, посредством датчиков, информацию о движении транспортного средства-носителя, такую как скорость, трехосное ускорение и угловая скорость в трехмерной ортогональной системе координат, и другую информацию транспортного средства-носителя и выводит результаты обнаружения процессору 50 последовательно. Группа датчиков 20 транспортного средства может включать в себя датчик скорости, датчик ускорения, датчик угловой скорости, датчик угла поворота коленчатого вала и т.п. Кроме того, группа датчиков 20 транспортного средства обнаруживает информацию об окружающей обстановке для транспортного средства-носителя. Группа датчиков 20 транспортного средства может включать в себя датчик изображения для захвата изображений окружающей обстановки для транспортного средства-носителя, датчик расстояния, такой как лазерный дальномер (LRF), для обнаружения расстояния и направления от транспортного средства-носителя до цели, датчик азимута для обнаружения азимута транспортного средства-носителя и т.п.
[0013] Запоминающее устройство 30 хранит картографическую информацию 31, включающую в себя информацию о полосах движения для каждой дороги. Запоминающее устройство 30 может включать в себя полупроводниковую память, магнитный диск или т.п., которые являются компьютерно-читаемыми носителями хранения. Картографическая информация 31 включает в себя не только общую картографическую информацию, такую как дороги, перекрестки, мосты, туннели и т.п., но также информацию о дорожных структурах, таких как положение, ширина и классификация зон дорожного движения для каждой полосы дорожного движения, и информацию о положениях планиметрических отличительных признаков, установленных вокруг дорог, таких как светофоры. Картографическая информация 31 может быть сохранена в запоминающем устройстве 30 заранее или может быть получена извне через сеть. Кроме того, запоминающее устройство 30 может хранить программы, необходимые для обработки, выполняемой в процессоре 50. Процессор 50 может включать в себя одну часть аппаратных средств или может включать в себя множество частей аппаратных средств.
[0014] I/F 40 связи является, например, инструментом связи для передачи и приема сигналов в и извне беспроводным образом. I/F 40 связи приспособлен для приема информации о заторе движения по меньшей мере по заданному маршруту, например, с помощью интеллектуальной транспортной системы (ITS), которая передает различные виды информации, такие как информация о дорожном движении и погодная информация, в реальном времени. ITS включает в себя VICS (систему автомобильной информации и связи, зарегистрированная торговая марка), интегрированные средства обработки и передачи информации и т.п. I/F 40 связи выводит принятую информацию процессору 50 последовательно.
[0015] Процессор 50 является схемой обработки, имеющей секцию 51 получения информации, секцию 52 задания маршрута, секцию 53 получения информации и секцию 54 формирования направляющей информации в качестве логической структуры. Процессор 50 может включать в себя, например, микроконтроллер, который является интегральной схемой, включающей в себя центральный процессор (CPU), память, I/F ввода-вывода и т.п. В этом случае, секции, включенные в процессор 50, реализуются посредством CPU, выполняющего компьютерную программу (программу направления по маршруту), установленную в микроконтроллере заранее. Секции, включенные в процессор 50, могут иметь одну объединенную часть аппаратных средств или могут иметь отдельные части аппаратных средств. Микроконтроллер может служить также, например, как электронный блок управления (ECU), используемый для другого управления, связанного с транспортным средством-носителем, таким как автоматическое управление движением.
[0016] Секция 51 получения положения получает текущее положение транспортного средства-носителя по картографической информации 31, на основании положения, измеренного посредством GPS-приемника 10, и информации о движении по транспортному средству-носителю, обнаруженной посредством группы датчиков 20 транспортного средства. Секция 51 получения положения может также получать более точное текущее положение транспортного средства-носителя на картографической информации 31, такое как положение транспортного средства-носителя на полосе движения в поперечном направлении транспортного средства, на основании относительных положений планиметрических отличительных признаков вокруг транспортного средства-носителя, обнаруженных посредством группы датчиков 20 транспортного средства, и положений планиметрических отличительных признаков на картографической информации 31.
[0017] Секция 52 задания маршрута задает пункт назначения на картографической информации 31, которого транспортное средство-носитель должно достигнуть, например, в ответ на операцию в I/F 80 ввода пользователем транспортного средства-носителя. Секция 52 задания маршрута выбирает маршрут движения для транспортного средства-носителя от точки отправления до пункта назначения на основании картографической информации 31 и задает его в качестве заданного маршрута. Точка отправления является текущим положением транспортного средства-носителя.
[0018] Секция 53 получения информации получает информацию о заторе движения на дорогах вокруг транспортного средства-носителя от I/F 40 связи. Секция 53 получения информации получает информацию о заторе движения по меньшей мере в указанном диапазоне расстояния впереди текущего положения транспортного средства-носителя на заданном маршруте, заданном посредством секции 52 задания маршрута. Секция 53 получения информации также получает информацию по заданному маршруту посредством секции 52 задания маршрута из информации о дорогах, сохраненной в картографической информации 31.
[0019] Секция 54 формирования направляющей информации формирует направляющую информацию для направления транспортного средства-носителя, так что транспортное средство-носитель движется по заданному маршруту, заданному посредством секции 52 задания маршрута. Секция 54 формирования направляющей информации обеспечивает направляющую информацию контроллеру, который управляет торможением, ускорением и рулением транспортного средства-носителя, чтобы направлять транспортное средство-носитель. Альтернативно, секция 54 формирования направляющей информации может направлять транспортное средство-носитель, обеспечивая направляющую информацию пользователю транспортного средства-носителя через дисплей 60 или динамик 70.
[0020] Дисплей 60 представляет различные виды информации пользователю транспортного средства-носителя, отображая изображения и инструкции под управлением процессора 50. Дисплей 60 является, например, устройством отображения, таким как жидкокристаллический дисплей. Дисплей 60 отображает направляющую информацию, сформированную посредством секции 54 формирования направляющей информации под управлением процессора 50. Дисплей 60 отображает карту вокруг текущего положения транспортного средства-носителя на основании картографической информации 31.
[0021] Динамик 70 воспроизводит голос под управлением процессора 50 для различных видов информации пользователю транспортного средства-носителя. Динамик 70 воспроизводит голос, указывающий направляющую информацию, сформированную посредством секции 54 формирования направляющей информации, под управлением процессора 50.
[0022] I/F 80 ввода, например, принимает операцию пользователя транспортного средства-носителя и выводит сигнал согласно операции в процессор 50. Операция в I/F 80 ввода может быть выполнена посредством голоса. Дисплей 60 и I/F 80 ввода могут быть объединены как дисплей с сенсорной панелью.
[0023] Способ направления по маршруту
Со ссылкой на блок-схему по фиг. 2, будет приведено описание для примера работы устройства направления по маршруту согласно этому варианту осуществления. Далее сценарий, в котором транспортное средство-носитель движется по заданному маршруту, заданному заранее, будет описан при необходимости с помощью фиг. 3 или 4. Заданный маршрут является полосой R движения для достижения пункта назначения, другими словами, дорогой, имеющей полосу R движения, соединенной с пунктом назначения.
[0024] На этапе S101 секция 53 получения информации получает информацию о заторе движения на участке от текущего положения P транспортного средства-носителя, полученного посредством секции 51 получения положения, до точки на указанном расстоянии (например, 5 км) на заданном маршруте, заданном посредством секции 52 задания маршрута, через I/F 40 связи. Отметим, что в этом варианте осуществления, приводится описание, предполагая, что дорога для движения для текущего положения P имеет множество полос L1-L4 движения, как иллюстрировано на фиг. 3.
[0025] На этапе S102 секция 53 получения информации определяет, включает ли себя информация о заторе движения, полученная на этапе S101, участок T затора движения, имеющий по меньшей мере указанное расстояние (например, 200 м), и флаг равен 0. Когда определяется, что флаг равен 0, и информация о заторе движения включает в себя участок T затора движения, имеющий по меньшей мере указанное расстояние, секция 53 получения информации переводит процесс на этап 103, а когда не определяется, что флаг равен 0, и что информация о заторе движения включает в себя участок T затора движения, имеющий по меньшей мере указанное расстояние, секция 53 получения информации переводит процесс на этап 104.
[0026] На этапе S103 секция 53 получения информации получает информацию о дороге от текущего положения P транспортного средства-носителя до ближайшей точки J1 ответвления на заданном маршруте из картографической информации 31 и I/F 40 связи и переводит процесс на этап 106. В частности, секция 53 получения информации получает расстояние D1 от текущего положения P до точки J1 ответвления, расстояние D2 от точки J1 ответвления до конечной точки Te участка T затора движения и расстояние D3 от текущего положения P до конечной точки Te участка T затора движения, на заданном маршруте. Кроме того, секция 53 получения информации получает информацию о полосе движения, указывающую полосы L1-L3 движения для въезда на следующую дорогу, следующую за точкой J1 ответвления (дорогу от точки J1 ответвления до точки J2 слияния) на заданном маршруте.
[0027] На этапе S104 секция 53 получения информации определяет, равен ли флаг 1 или нет, и транспортное средство-носитель движется от точки B по меньшей мере на указанное расстояние (например, 500 м). Расстояние, на которое транспортное средство-носитель перемещается, может быть получено вычитанием точки B, описанной ниже, из текущего положения P на заданном маршруте. Когда определяется, что флаг равен 1, и транспортное средство-носитель проехало дальше указанного расстояния, секция 53 получения информации продвигает процесс на этап 105, а когда не определяется, что флаг равен 1, и транспортное средство-носитель проехало дальше указанного расстояния, секция 53 получения информации возвращает процесс на этап S101.
[0028] На этапе S105 секция 53 получения информации устанавливает флаг с 1 в 0 и возвращает процесс на этап S101.
[0029] На этапе S106 секция 53 получения информации определяет, продолжается ли участок T затора движения от точки J1 ответвления до точки на указанном расстоянии (например, 5 км) от текущего положения P на заданном маршруте. Если участок T затора движения продолжается, секция 53 получения информации переводит процесс на этап 107, а если нет, секция 53 получения информации переводит процесс на этап 108.
[0030] На этапе S108 секция 53 получения информации устанавливает флаг с 0 в 1 и сохраняет точку B в текущем положении P транспортного средства-носителя. Как описано выше, секция 53 получения информации устанавливает флаг на основании расстояния, на которое транспортное средство-носитель переместилось, и протяженности участка T затора движения. Это делает возможным увеличение интервалов между моментами времени получения конкретной информации, уменьшая нагрузку обработки процессора 50 и объем передаваемой информации I/F 40 связи.
[0031] На этапе S107 секция 53 получения информации определяет, имеет ли следующая дорога следом за точкой J1 ответвления на заданном маршруте множество полос движения. Если следующая дорога имеет множество полос движения, секция 53 получения информации переводит процесс на этап 109, если нет, другими словами, если следующая дорога имеет одну полосу движения, секция 53 получения информации переводит процесс на этап 110.
[0032] На этапе S110 секция 54 формирования направляющей информации задает участок от текущего положения P до конечной точки Te на полосе движения для въезда на следующую дорогу вслед за точкой J1 ответвления в качестве цели и формирует направляющую информацию до цели. Направляющая информация включает в себя расстояние от текущего положения P до конечной точки Te, направление цели (направление вправо-влево), и число полос движения, которое транспортное средство-носитель должно сменить с полосы L4 движения к тому времени, когда транспортное средство достигает цели. Секция 54 формирования направляющей информации обеспечивает направляющую информацию контроллеру транспортного средства-носителя или пользователю транспортного средства-носителя, чтобы направлять транспортное средство-носитель.
[0033] На этапе S109 секция 53 получения информации находит точку J4 ответвления-слияния, в которой полоса движения уникально определяется, из множества полос L1-L3 движения следующей дороги, следующей за точкой J1 ответвления, на заданном маршруте впереди от точки J1 ответвления. Другими словами, секция 53 получения информации находит точку J4 ответвления-слияния, в которой полосы L1 и L3, отличные от полосы R (полосы L2) для достижения пункта назначения, исчезают, из множества полос L1-L3 движения на следующей дороге, следующей за точкой J1 ответвления на заданном маршруте. Секция 53 получения информации переводит процесс на этап 111 после нахождения точки J4 ответвления-слияния. Отметим, что точка ответвления-слияния является точкой, в которой число полос уменьшается вследствие ответвления, слияния или т.п., и точка ответвления-слияния включает в себя точку ответвления, где дорога разветвляется, и точку слияния, где дороги сливаются.
[0034] На этапе S111 секция 53 получения информации находит начальную точку Ts участка T затора движения на заданном маршруте, на основании информации о заторе движения, полученной через картографическую информацию 31 и I/F 40 связи.
[0035] На этапе S112 секция 53 получения информации определяет, находится ли точка J4 ответвления-слияния, обнаруженная на этапе S109, ближе по ходу движения от начальной точки Ts, обнаруженной на этапе S111, на заданном маршруте. Если точка J4 ответвления-слияния находится ближе по ходу движения от начальной точки Ts, секция 53 получения информации переводит процесс на этап 113, а если точка J4 ответвления-слияния находится дальше по ходу движения от начальной точки Ts, секция 53 получения информации переводит процесс на этап 114.
[0036] На этапе S113 начальная точка Ts участка T затора движения находится дальше по ходу движения от точки J4 ответвления-слияния, как иллюстрировано на фиг. 3, а конечная точка Te находится ближе по ходу движения от точки J1 ответвления. В этом случае, секция 54 формирования направляющей информации задает участок от текущего положения P до конечной точки Te на полосе R движения для достижения пункта назначения в качестве целевого и формирует направляющую информацию до цели. Направляющая информация включает в себя расстояние от текущего положения P до конечной точки Te, направление цели (направление вправо-влево) и число полос движения от полосы L4 движения до цели. Секция 54 формирования направляющей информации обеспечивает направляющую информацию контроллеру транспортного средства-носителя или пользователю транспортного средства-носителя, чтобы направлять транспортное средство-носитель.
[0037] На этапе S114 начальная точка Ts участка T затора движения находится ближе по ходу движения от точки J4 ответвления-слияния, как иллюстрировано на фиг. 4, а конечная точка Te находится ближе по ходу движения от точки J1 ответвления. В этом случае, секция 54 формирования направляющей информации задает участок от текущего положения P до конечной точки Te на самой левой полосе L1 движения из полос L1-L3 движения в качестве цели и формирует направляющую информацию до цели. Направляющая информация включает в себя расстояние от текущего положения P до конечной точки Te, направление цели (направление вправо-влево) и число полос движения от полосы L4 движения до цели. Секция 54 формирования направляющей информации выдаёт направляющую информацию контроллеру транспортного средства-носителя или пользователю транспортного средства-носителя, чтобы направлять транспортное средство-носитель.
[0038] Например, в примере, иллюстрированном на фиг. 3, если транспортное средство-носитель изменяет полосу движения на самую левую полосу L1 раньше конечной точки Te и движется на участке T затора движения, транспортному средству-носителю необходимо менять полосу на полосу R (полосу L2) для достижения пункта назначения до достижения точки J4 ответвления-слияния. Альтернативно, если транспортное средство-носитель меняет полосу движения на полосу L3 прежде конечной точки Te, транспортному средству-носителю необходимо менять полосу движения на полосу R для достижения пункта назначения до достижения точки J3 ответвления. В таких случаях возникают помехи, состоящие в сменах полос движения на участке T затора движения.
[0039] Устройство направления по маршруту согласно этому варианту осуществления направляет транспортное средство-носитель на полосу R движения, ведущую к пункту назначения, до достижения конечной точки Te, если начальная точка Ts затора движения находится дальше по ходу движения от точки J4 ответвления-слияния, а конечная точка Te находится ближе по ходу движения от точки J1 ответвления. Это уменьшает вероятность возникновения помех, состоящих в сменах полос движения на участке T затора движения.
[0040] Устройство направления по маршруту согласно этому варианту осуществления направляет транспортное средство-носитель на самую левую полосу L1 движения, которая продолжается до следующей дороги, следующей за точкой J1 ответвления, до достижения конечной точки Te, если начальная точка Ts затора движения находится ближе по ходу движения от точки J4 ответвления-слияния. Как иллюстрировано на фиг. 4, транспортное средство-носитель может достигать полосы R движения без помехи после проезда через участок T затора движения до достижения точки J4 ответвления-слияния. Это уменьшает число шансов, в которых транспортное средство-носитель продолжает двигаться по полосам L2-L5 движения, которые являются скоростными полосами движения, на участках без затора движения. Отметим, что, хотя в этом варианте осуществления транспортное средство-носитель направляется на самую левую полосу L1 движения, полоса движения, на которую транспортное средство-носитель направляется, может быть изменена в зависимости от структуры дороги. Хотя в этом варианте осуществления было приведено описание для случая, когда заданный маршрут находится с левой стороны от точки J1 ответвления, и заданный маршрут имеет множество полос L1-L3, возможно, что заданный маршрут находится с правой стороны от точки J1 ответвления, как в случае, например, кольцевой дороги, и заданный маршрут с правой стороны от точки J1 ответвления имеет множество полос движения. В таком случае, транспортное средство-носитель направляется на самую правую полосу, которая продолжается до следующей дороги, следующей за точкой J1 ответвления. Это делает возможным навигацию согласно структуре дороги.
[0041] Устройство направления по маршруту согласно этому варианту осуществления выдаёт пользователю транспортного средства-носителя расстояние от текущего положения P до конечной точки Te, направление цели относительно транспортного средства-носителя и число полос движения от полосы движения транспортного средства-носителя до цели, чтобы направлять транспортное средство-носитель. Пользователь транспортного средства-носителя может знать момент времени, до которого изменение полосы движения до цели необходимо закончить, и это увеличивает вероятность того, что транспортное средство-носитель может менять полосы движения без труда, прежде чем транспортное средство-носитель достигает конечной точки Te.
[0042] Другие варианты осуществления
Как описано выше, настоящее изобретение было описано с помощью вышеприведенного варианта осуществления. Однако не следует понимать, что описание и чертежи, составляющие часть этого описания изобретения, ограничивают настоящее изобретение. Различные альтернативные варианты осуществления, примеры и технологии работы должны стать очевидными специалистам в данной области техники из данного описания.
[0043] Например, в уже описанном варианте осуществления, точка J1 ответвления, ближайшая к текущему положению P транспортного средства-носителя, может быть точкой ответвления-слияния, в которой число полос движения уменьшается посредством слияния или т.п. Кроме того, точка J4 ответвления-слияния на заданном маршруте, в которой полосы L1 и L3, отличные от полосы R движения для достижения пункта назначения, исчезают, из числа полос L1-L3 движения на следующей дороге, следующей за точкой J1 ответвления, ближайшей к текущему положению P транспортного средства-носителя, необязательно является точкой ответвления. Кроме того, в случае, когда следующая дорога, следующая за точкой J1 ответвления, имеет множество полос движения, число этих полос и число полос в текущем положении P может быть одинаковым или может различаться.
[0044] Например, предположим сценарий, который иллюстрирован на фиг. 5, в котором на заданном маршруте следующая дорога, следующая за точкой J1 ответвления, имеющая множество полос L1-L3, сливается с дорогой, имеющей единственную полосу L5 в следующей точке J2 слияния, и затем, в точке J5, полоса L2 сливается в полосу L3, уменьшая число полос движения. В этом случае, начальная точка Ts участка T затора движения находится дальше по ходу движения от точки J5, в которой число полос движения уменьшается, а конечная точка Te находится ближе по ходу движения от точки J1 ответвления. В этом случае, секция 54 формирования направляющей информации направляет транспортное средство-носитель на полосу R движения (полосу L3) для достижения пункта назначения в качестве цели до достижения конечной точки Te. Это уменьшает вероятность возникновения помех, состоящих в сменах полос движения на участке T затора движения.
[0045] Кроме того, если начальная точка Ts участка T затора движения находится ближе по ходу движения от точки J5, в которой число полос движения уменьшается, а конечная точка Te находится ближе по ходу движения от точки J1 ответвления, как иллюстрировано на фиг. 6, секция 54 формирования направляющей информации направляет транспортное средство-носитель на самую левую полосу L1 движения следующей дороги, следующей за точкой J1 ответвления, в качестве цели до достижения конечной точки Te. Это уменьшает число шансов, в которых транспортное средство-носитель продолжает двигаться по полосам L2-L5 движения, которые являются скоростными полосами движения, на участках без затора движения.
[0046] Кроме того, в уже описанном варианте осуществления, множество полос L1-L3 движения, которые имеет следующая дорога, следующая за точкой J1 ответвления на заданном маршруте, могут быть полосами движения, из числа полос L1-L3, на которые транспортное средство-носитель может менять полосу движения с текущей полосы L4 движения, прежде чем транспортное средство-носитель достигает точки J1 ответвления. Другими словами, секция 53 получения информации может вычислять полосы движения, на которые транспортное средство-носитель может менять полосу движения с текущей полосы L4 движения, прежде чем транспортное средство-носитель достигает точки J1 ответвления, в качестве полос движения следующей дороги, следующей за точкой J1 ответвления, на основании расстояний D1-D3, полученных на этапе S103.
[0047] Кроме того, в уже описанном варианте осуществления, транспортное средство, на которое установлено устройство направления по маршруту, может быть автоматически движущимся транспортным средством, которое движется автоматически, обнаруживая информацию об окружающей обстановке для заданного маршрута, или может также быть транспортным средством, которое движется в ответ на действие пользователя. В случае, когда устройство направления по маршруту устанавливается на автоматически движущееся транспортное средство, секция 54 формирования направляющей информации передаёт направляющую информацию контроллеру для управления движением транспортного средства, и контроллер управляет торможением, ускорением, рулением и другим действием в ответ на направляющую информацию.
[0048] Функции, описанные в вышеприведенном варианте осуществления, могут быть реализованы посредством одной или более схем обработки. Схема обработки включает в себя запрограммированное устройство обработки, такое как устройство обработки, включающее в себя электрическую схему. Схема обработки может также включать в себя устройства, такие как специализированная интегральная схема (ASIC), приспособленная выполнять указанные функции, и части схем.
[0049] Само собой разумеется, что настоящее изобретение включает в себя, помимо вышеописанного, различные варианты осуществления и т.п., не описанные в данном документе, такие как конфигурации, вместе с которыми применяются вышеописанные конфигурации. Таким образом, технический объём настоящего изобретения определяется только материалами, характеризующими изобретение согласно формуле изобретения, соответствующими вышеприведенному описанию.
Список условных обозначений
[0050] 30 запоминающее устройство
31 картографическая информация
50 процессор
J1 точка ответвления
J4 точка ответвления-слияния
L1-L5, R полоса движения
T участок затора движения
Te конечная точка
Ts начальная точка
Предложенное изобретение относится к средствам направления транспортных средств по заданному маршруту. Способ направления по маршруту содержит следующие этапы: если на заданном маршруте дорога для движения в текущем положении транспортного средства имеет первое множество полос движения, а следующая дорога, следующая за ближайшей точкой ответвления от текущего положения, имеет второе множество полос движения, находят точку ответвления-слияния, до которой полосы, отличные от полосы движения для достижения пункта назначения, из второго множества полос движения исчезают; если начальная точка затора движения находится дальше по ходу движения от точки ответвления-слияния, в которой полосы, отличные от полосы движения до пункта назначения, исчезают, и конечная точка затора движения находится ближе по ходу движения от ближайшей точки ответвления, направляют транспортное средство на полосу движения для достижения пункта назначения в качестве цели до достижения конечной точки; и если начальная точка находится ближе по ходу движения от точки ответвления-слияния, в которой полосы, отличные от полосы движения до пункта назначения, исчезают, направляют транспортное средство на полосу движения, отличную от скоростных полос, из второго множества полос в качестве цели до достижения конечной точки. Указанный способ реализуется при помощи соответствующего устройства. Данное изобретение направлено на обеспечение движения транспортного средства по маршруту, имеющему меньшую вероятность возникновения помех движению, обусловленных заторами. 2 н. и 1 з.п. ф-лы, 6 ил.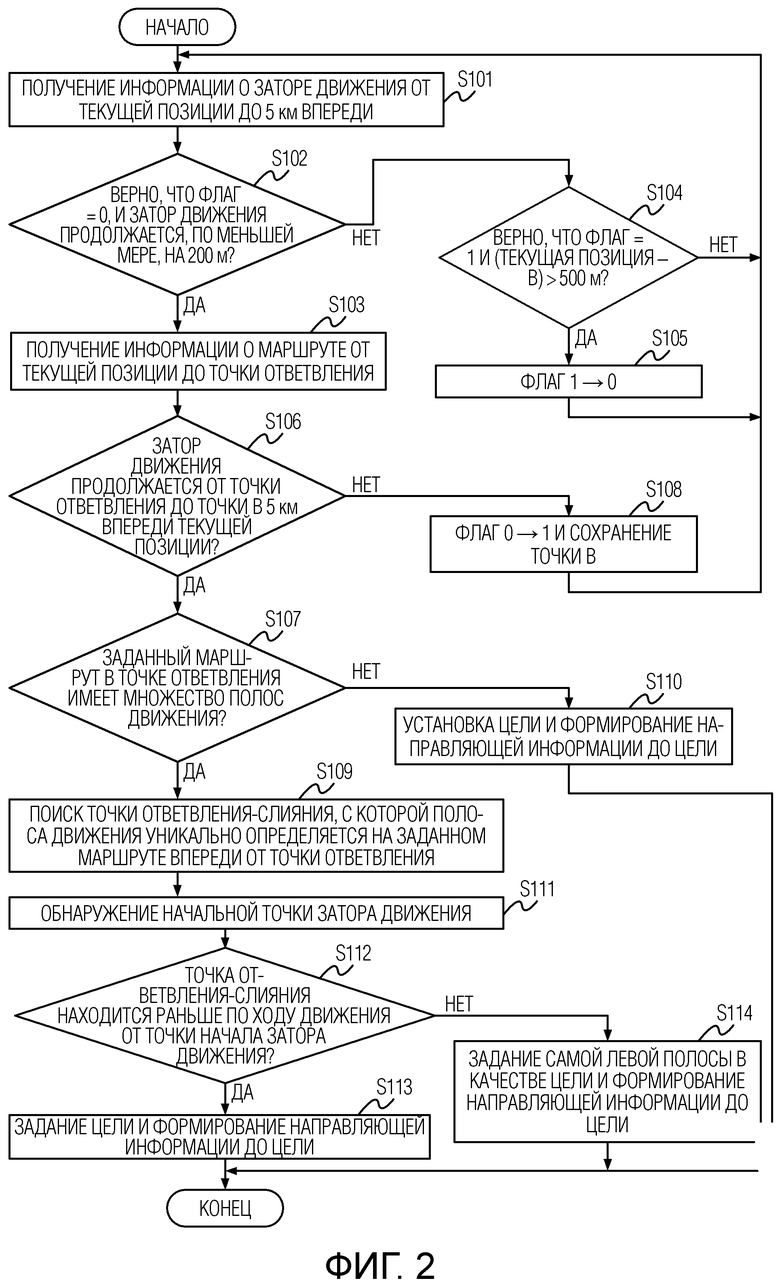
1. Способ направления по маршруту для направления транспортного средства таким образом, что транспортное средство движется по заданному маршруту от точки отправления до пункта назначения транспортного средства, заданному на основании картографической информации, причём способ содержит этапы, на которых:
если на заданном маршруте дорога для движения в текущем положении транспортного средства имеет первое множество полос движения, а следующая дорога, следующая за ближайшей точкой ответвления от текущего положения, имеет второе множество полос движения, находят точку ответвления-слияния, до которой полосы, отличные от полосы движения для достижения пункта назначения, из второго множества полос движения исчезают;
если начальная точка затора движения находится дальше по ходу движения от точки ответвления-слияния, в которой полосы, отличные от полосы движения до пункта назначения, исчезают, и конечная точка затора движения находится ближе по ходу движения от ближайшей точки ответвления, направляют транспортное средство на полосу движения для достижения пункта назначения в качестве цели до достижения конечной точки; и
если начальная точка находится ближе по ходу движения от точки ответвления-слияния, в которой полосы, отличные от полосы движения до пункта назначения, исчезают, направляют транспортное средство на полосу движения, отличную от скоростных полос, из второго множества полос в качестве цели до достижения конечной точки.
2. Способ направления по маршруту по п. 1, при этом
навигация транспортного средства включает в себя этап, на котором выдают пользователю транспортного средства расстояние от текущего положения до конечной точки и направление цели относительно транспортного средства.
3. Устройство направления по маршруту, содержащее:
запоминающее устройство, которое хранит картографическую информацию; и
процессор, который направляет транспортное средство так, что транспортное средство движется по заданному маршруту от точки отправления до пункта назначения транспортного средства, заданному на основании картографической информации, при этом
если на заданном маршруте дорога для движения в текущем положении транспортного средства имеет первое множество полос движения, а следующая дорога, следующая за ближайшей точкой ответвления от текущего положения, имеет второе множество полос движения, процессор находит точку ответвления-слияния, до которой полосы, отличные от полосы движения для достижения пункта назначения, из второго множества полос движения исчезают,
если начальная точка затора движения находится дальше по ходу движения от точки ответвления-слияния, в которой полосы, отличные от полосы движения до пункта назначения, исчезают, и конечная точка затора движения находится ближе по ходу движения от ближайшей точки ответвления, процессор направляет транспортное средство на полосу движения для достижения пункта назначения до достижения конечной точки, и
если начальная точка находится ближе по ходу движения от точки ответвления-слияния, в которой полосы, отличные от полосы движения до пункта назначения, исчезают, процессор направляет транспортное средство на полосу движения, отличную от скоростных полос, из второго множества полос в качестве цели до достижения конечной точки.
| Колосоуборка | 1923 |
|
SU2009A1 |
| JPH 07141591 A, 02.06.1995 | |||
| JP 2004185504 A, 02.07.2004 | |||
| US 7171306 B2, 30.01.2007 | |||
| KR 101235821 B1, 21.02.2013 | |||
| JP 2010261892 A, 18.11.2010 | |||
| TSUMURA T | |||
| et al "On automatic block and passing control system of automobile on multiple highway lanes" // Proceeding of Conference on Intelligent Vehicles Tokyo, Japan | |||

