Настоящее изобретение относится к способу эксплуатации канатной дороги, с помощью которой несколько транспортных средств, подвешенных на подъемном канате, перемещают между по меньшей мере двумя станциями, и с помощью которой измеряют отклонение транспортного средства от вертикали с помощью датчика на по меньшей мере одном транспортном средстве канатной дороги. Кроме того, изобретение относится к соответствующей канатной дороге.
На канатную дорогу с транспортными средствами, подвешенными на перемещающемся по замкнутой траектории канате, независимо от того, являются ли они постоянными или съемными, применяются особые требования безопасности. Это особенно верно, но не исключительно, для канатных дорог для перевозки людей. Риск безопасности это качательное движение транспортного средства, поскольку оно может привести к столкновению транспортного средства со стационарными средствами канатной дороги, такими как вышка канатной дороги, с воздушными линиями для передачи энергии и/или данных, проходящими между вышками канатной дороги, или с устройством у въезда на станцию, или с другими транспортными средствами. В худшем случае может случиться так, что транспортное средство оторвется от каната и сломается, или канат сорвется. Качательное движение транспортного средства обычно вызывается приложением к транспортному средству внешних сил, таких как ветер или преднамеренное покачивание транспортного средства, вызванное пассажирами. Но даже односторонняя нагрузка на транспортное средство, особенно в сочетании с ветром, может привести к качательному движению транспортного средства.
Контроль за качательным движением транспортных средств обычно является обязанностью обслуживающего персонала канатной дороги, который должен оценить, могут ли происходить критические качательные движения транспортных средств во время эксплуатации канатной дороги или нет. При необходимости обслуживающий персонал должен уменьшить скорость каната или полностью остановить канатную дорогу. Обслуживающему персоналу обычно предоставляются измеренные значения датчиков ветра, расположенных вдоль маршрута. Однако в редких случаях весь маршрут канатной дороги виден для обслуживающего персонала, а также климатические условия (например, туман, снег, дождь и т.д.) или условия освещения (например, сумерки, ночь и т.д.) влияют на вид. Кроме того, датчик ветра обнаруживает только условия ветра в непосредственной близости от датчика ветра, но не может предоставить какую-либо информацию о ветре в другой точке канатной дороги. Поэтому необходимо, чтобы датчики ветра были прикреплены во всех критических точках (например, открытые ветру вышки канатной дороги) канатной дороги, что увеличивает затраты. Обычно к обслуживающему персоналу предъявляются требования снизить скорость транспортировки, если скорость ветра превышает определенный уровень, или полностью прекратить эксплуатацию канатной дороги. Это, конечно, очень консервативный подход, который иногда приводит к снижению скорости транспортировки или даже останавливает канатную дорогу, хотя это не является абсолютно необходимым.
Следовательно, меры по обеспечению более безопасного и надежного контроля за качательным движением транспортных средств уже стали известны.
В ЕР 1 837 264 А2 описано использование датчиков наклона на транспортных средствах для определения отклонения транспортного средства от вертикали. Измеренные значения датчиков наклона передаются через передатчик на транспортном средстве либо через ретрансляционные станции на вышках канатной дороги, либо непосредственно на приемную станцию станции. В случае чрезмерного отклонения либо снижается скорость, либо останавливается канатная дорога.
В AT 411 982 B также описано использование датчиков наклона на транспортных средствах для обнаружения отклонения транспортного средства. Кроме того, на транспортном средстве обеспечивается обнаружение скорости ветра и направления ветра. Записанные данные оцениваются и хранятся в самом транспортном средстве. Когда транспортное средство проезжает через станцию, собранные данные также могут быть переданы в приемник и могут использоваться для управления канатной дорогой.
Также в WO 95/30216 А1 отклонение транспортного средства обнаруживается с помощью датчика наклона на транспортном средстве. Кроме того, каждое транспортное средство имеет уникальный идентификатор. Транспортное средство передает информацию о наклоне и идентификатор приемнику на вышке канатной дороги, который передает информацию о наклоне и идентификатор в блок управления канатной дороги для оценки.
Особой опасной точкой является въезд на станцию канатной дороги, поскольку многие стационарные сооружения расположены вблизи транспортных средств. Кроме того, так называемые внешние направляющие рельсовые раструбы направляющего рельса обычно располагаются в зоне въезда в станцию, в которую должна входить съемная рукоятка транспортного средства на канате для наведения. При сильных отклонениях транспортного средства на въезде в станцию может случиться так, что внешний направляющий рельсовый раструб будет пропущен, что может привести к сильному повреждению канатной дороги и/или транспортного средства или даже к тому, что транспортное средство оторвется от каната. Поэтому обнаружение качательного движения на въезде в станцию особенно важно, и оператор канатной дороги должен убедиться, что во время эксплуатации канатной дороги не будет критических ситуаций, например, со стороны обслуживающего персонала, контролирующего предоставленную информацию датчиками ветра, расположенными вдоль канатной дороги.
В ЕР 2 147 843 А1 предлагается обнаруживать качательное движение транспортного средства до въезда на станцию с помощью датчика на станции, в частности лазерного сканера или камеры, с помощью которых определяется расстояние от транспортного средства до станции, чтобы управлять приводом канатной дороги в зависимости от качательного движения. Таким образом, качательное движение транспортного средства поперек направления движения до станции может быть надежно обнаружено. Обнаружение потенциальной опасности при въезде транспортного средства на станцию невозможно. Например, если транспортное средство приближается к станции в наклонном положении без качательного движения, устройство управления не будет реагировать.
Поэтому задачей настоящего изобретения является создание способа, с помощью которого потенциальная опасность на въезде транспортного средства на станцию канатной дороги может быть оценена более надежно и соответствующим образом предотвращена.
Эта задача достигается тем, что отклонение транспортного средства измеряют датчиком перед въездом в станцию и передают в блок управления канатной дороги, тем что в то же время обнаруживают возникновение порыва ветра перед въездом в станцию блоком управления канатной дороги и что блок управления канатной дороги управляет приводом канатной дороги в зависимости от переданного отклонения и обнаруженного порыва ветра. Таким образом, блок управления канатной дороги может не только обнаруживать и оценивать текущее отклонение транспортного средства, но также может учитывать возникновение порывов ветра при управлении приводом канатной дороги. Было признано, что сочетание отклонения и порыва ветра перед или в зоне возле въезда в станцию больше всего создает значительную потенциальную опасность, которая теперь может быть распознана вовремя. Теперь блок управления канатной дороги может своевременно реагировать на такую потенциальную опасность и снижать, например, скорость движения канатной дороги.
Благодаря дополнительному определению направления порыва ветра блок управления канатной дороги позволяет еще лучше реагировать на потенциальную опасность, поскольку не каждый порыв ветра с любого направления одинаково опасен. Следовательно, в предпочтительном варианте выполнения могут быть приняты во внимание порывы ветра только с определенного направления, или порывы ветра с разных направлений могут рассматриваться по-разному.
Чтобы по-прежнему осуществлять аварийную остановку транспортного средства перед въездом на станцию, предпочтительно обеспечено, что блок управления канатной дороги обнаруживает отклонение транспортного средства и возникновение порыва ветра, а также, возможно, и направление порыва ветра на таком расстоянии до въезда в станцию, которое больше тормозного пути транспортного средства.
В особенно предпочтительном варианте выполнения на транспортном средстве в качестве передающего устройства установлен радиопередатчик, а приемник выполнен в качестве считывающего устройства для радиопередатчика. Радиопередатчики это небольшие компактные устройства, которые можно легко разместить на транспортном средстве. Если радиопередатчик выполнен в особенно выгодном варианте в качестве пассивного радиопередатчика, независимый источник питания транспортного средства может быть исключен, поскольку транспортное средство может затем снабжаться электрической энергией через радиопередатчик. С этой целью считыватель может излучать сигнал опроса через передающую антенну, который радиопередатчик принимает и использует для получения электрической энергии для работы радиопередатчика и датчика.
Настоящее изобретение описывается более подробно ниже со ссылкой на Фигуры 1-4, которые показывают предпочтительные варианты выполнения изобретения примерным, схематичным и неограничительным изобретение образом. На фигурах:
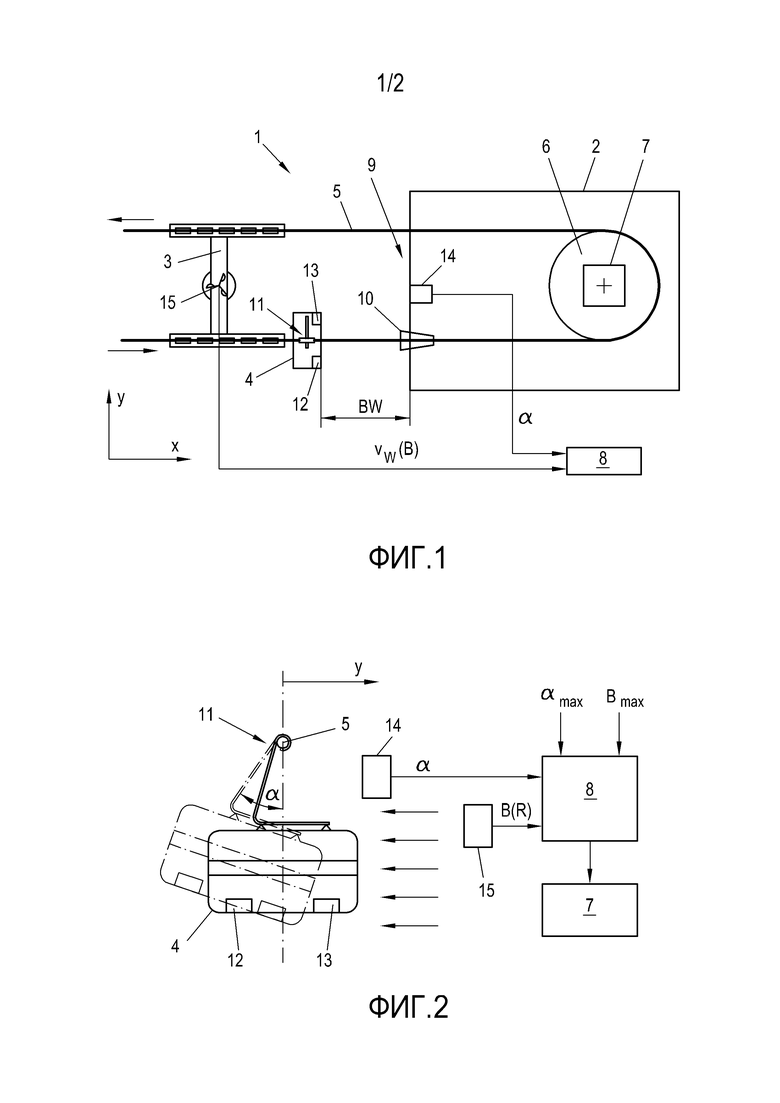
На Фиг. 1 показана зона станции канатной дороги с контролем отклонения транспортного средства,
На Фиг. 2 показано схематическое представление процедуры согласно изобретению для контроля отклонения транспортного средства,
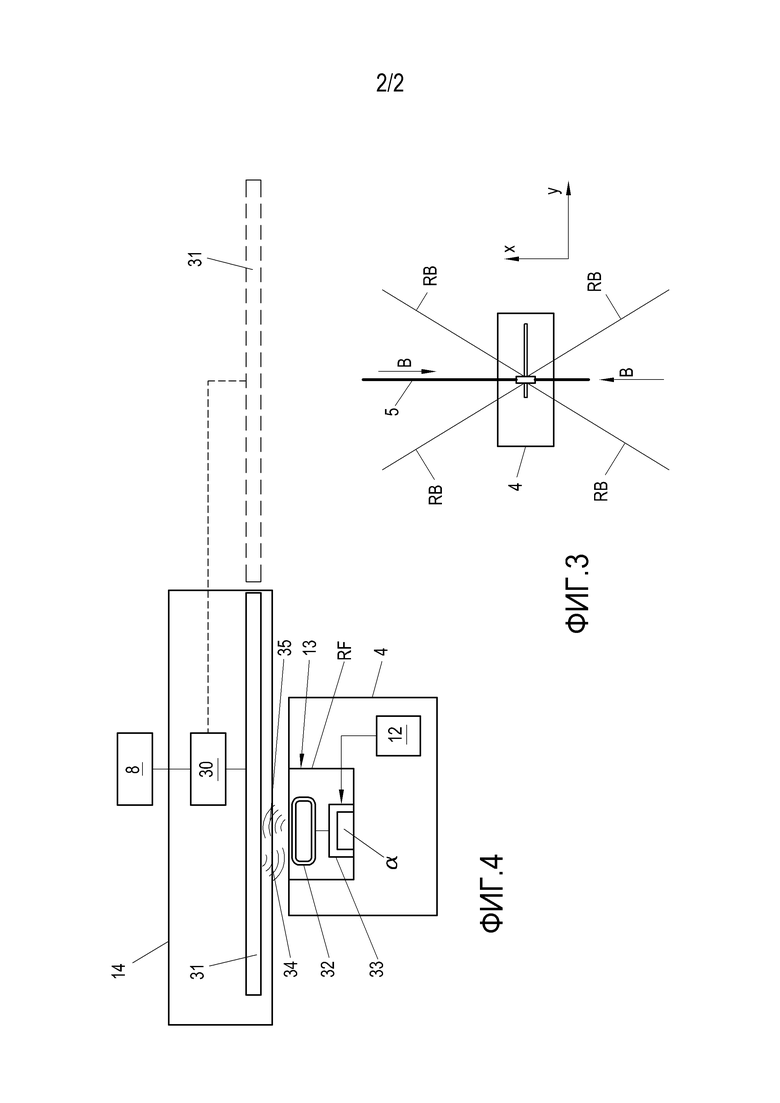
На Фиг. 3 показано использование диапазонов направленности при оценке порывов ветра, и
На Фиг. 4 показано использование радиопередатчика для передачи отклонения на блок управления канатной дороги.
На Фиг.1 показана станция 2 канатной дороги 1 и часть маршрута транспортировки канатной дороги 1 с вышкой 3 канатной дороги перед въездом на станцию. Транспортные средства 4 канатной дороги 1 транспортируются с помощью подъемного каната 5, который поворачивается на станциях 2 с помощью канатных шкивов. Один канатный шкив 6 приводится в движение приводом 7 канатной дороги, причем привод 7 канатной дороги управляется блоком 8 управления канатной дороги. У въезда на станцию 9 может быть установлен внешний направляющий рельсовый раструб 10, в который должен входить съемный держатель 11 транспортного средства 4, чтобы направлять транспортное средство 4 на станцию 2. Для изобретения не имеет значения, являются ли транспортные средства 4 постоянно соединенными с подъемным канатом 5, или же транспортные средства 4 могут быть связаны с подъемным канатом 5 (например, с помощью хорошо известных съемных захватов). Аналогичным образом, для изобретения не имеет значения, перевозятся ли люди и/или материал по канатной дороге 1. Также может быть установлено несколько опорных канатов между станциями, на которых движутся транспортные средства 4.
На транспортном средстве 4 расположен датчик 12 для определения отклонения транспортного средства 4 от вертикали. Прежде всего, интерес представляет отклонение α в направлении y, поперечном направлению транспортировки x (Фиг. 2). Но также может быть обнаружено наибольшее отклонение α, которое не обязательно происходит в поперечном направлении y. Для этой цели может быть использован любой подходящий датчик, например датчик положения или датчик ускорения. В случае датчика ускорения данные, подаваемые датчиком 12 с определенной частотой дискретизации, записываются, например, в память на транспортном средстве 4. С этими данными всегда можно вывести текущее отклонение α.
С помощью датчика 12 отклонение α обычно обнаруживается и передается на блок 8 управления канатной дороги. Это предпочтительно осуществляется с помощью беспроводной передачи данных, например на радиочастотах. Для этой цели на транспортном средстве 4 может быть установлено передающее устройство 13, которое передает обнаруженное отклонение α транспортного средства 4 приемнику 14 на станции 2 или в зоне вблизи станции 2. Приемник 14 подключен к блоку 8 управления канатной дороги и передает принятый сигнал или информацию, переданную в нем, в блок 8 управления канатной дороги.
Кроме того, возникновение порывов B ветра обнаруживается перед въездом на станцию 9. Для этой цели, перед въездом на станцию 9, например, на последней вышке 3 канатной дороги перед станцией 2, может быть установлен датчик ветра 15. Датчик ветра 15 передает полученные данные в блок 8 управления канатной дороги через подходящее коммуникационное соединение. Для этой цели может быть установлено проводное или беспроводное соединение. Например, в случае беспроводного соединения связи датчик ветра 15 может отправлять данные по радиоканалу в приемник 14 на станции 2. Датчик ветра 15 измеряет либо скорость ветра vw, либо непосредственно порывы B ветра. Порыв B ветра понимается как временное изменение скорости ветра vw. Если измерена скорость ветра vw, значение для порыва B ветра может быть получено посредством производной по времени  . Это также можно сделать в блоке 8 управления канатной дороги. В принципе, датчик ветра 15 для определения скорости ветра vw или значения порыва ветра также может быть установлен на транспортном средстве 4, и тогда необходимо вычитать скорость транспортного средства 4. В этом случае скорость ветра vw или значение для порыва ветра также могут быть отправлены с помощью передающего устройства 13 на приемник 14 станции 2 и, таким образом, на блок 8 управления канатной дороги.
. Это также можно сделать в блоке 8 управления канатной дороги. В принципе, датчик ветра 15 для определения скорости ветра vw или значения порыва ветра также может быть установлен на транспортном средстве 4, и тогда необходимо вычитать скорость транспортного средства 4. В этом случае скорость ветра vw или значение для порыва ветра также могут быть отправлены с помощью передающего устройства 13 на приемник 14 станции 2 и, таким образом, на блок 8 управления канатной дороги.
Также может быть обеспечено обнаружение направления ветра с помощью датчика ветра 15. Таким образом, может быть обнаружено не только возникновение порывов B ветра, но также и в каком направлении R происходит порыв B ветра. Направление R порывов B ветра может значительно влиять на качательное движение транспортного средства 4. Например, порыв B ветра, который действует на транспортное средство 4 в транспортном направлении x вдоль маршрута, спереди или сзади, может влиять значительно существеннее, чем порыв B ветра в поперечном направлении y. Если порыв B ветра воздействует на транспортное средство 4 сбоку, воздействие в поперечном направлении y происходит непосредственно, но поверхность контакта, например, кресла в качестве транспортного средства 4, очень мала. Однако, если порыв B ветра воздействует на кресло с открытым экраном спереди, поверхность контакта намного больше, что может привести к значительному отклонению в направлении транспортировки x и в поперечном направлении y.
Блок 8 управления канатной дороги теперь может комбинировать текущее отклонение α и возникновение порывов B ветра и может соответствующим образом управлять приводом 7 канатной дороги. С этой целью направление R порывов B ветра также может быть принято во внимание. При практической эксплуатации канатной дороги 1 было обнаружено, что, в частности, отклонение α, например, из-за загрузки транспортного средства 4 только с одной его стороны, в комбинации с возникновением порывов B ветра в зоне въезда на станцию 9, в зависимости от направления R порыва B ветра, может быть особенно опасным. В этом случае транспортное средство 4 даже не должно приближаться к въезду в станцию 9 во время качания. Однако, если транспортное средство 4 качается на подъемном канате 5, то наибольшее отклонение качательного движения может использоваться в качестве отклонения α. При определенном отклонении α и когда возникают определенные порывы B ветра, могут возникать большие качательные движения транспортного средства 4 в поперечном направлении y, что может привести к тому, что транспортное средство 4 коснется стационарного компонента станции 2 на въезде на станцию 9 или даже пропустит внешний направляющий рельсовый раструб 10. Оба эти события могут привести к серьезным авариям и повреждению канатной дороги 1 и/или транспортного средства 4. Посредством сочетания определения отклонения α с обнаружением возникновения порывов B ветра согласно настоящему изобретению такие последствия могут быть эффективно предотвращены.
Имеет смысл определить допустимое отклонение αmax и допустимый максимальный порыв Bmax ветра (ФИГ. 2). Если оба допустимых значения превышены перед въездом в станцию 9, то, например, привод 7 канатной дороги может управляться блоком 8 управления канатной дороги, чтобы снизить скорость движения или остановить канатную дорогу 1. Конечно, несколько пороговых значений могут быть определены для отклонения α и/или для порыва B ветра. Таким образом, текущее состояние транспортного средства 4 и ветер на въезде станции 9 могут быть классифицированы как менее критичные по отношению к критическим. Например, в случае менее критичной скорости движения скорость уменьшается (также возможно в несколько этапов), а в случае критических условий канатная дорога 1 останавливается. Блок 8 управления канатной дороги, конечно, может по-разному оценивать отклонение α и порыв B ветра, например, чтобы учитывать особые условия или конструкцию канатной дороги 1. Последние или фиксированные пороговые значения также могут быть изменены при работе канатной дороги 1, чтобы учитывать информацию, полученную во время эксплуатации канатной дороги.
Кроме того, направление R порыва B ветра также может быть определено и учтено в блоке 8 управления канатной дороги во время управления приводом 7 канатной дороги. Например, для разных направлений R или диапазонов направлений R могут быть заданы разные пороги отклонения α и/или порывов B ветра. Но это также может быть задано с учетом только порывов B ветра с определенного направления R или из ряда направлений R. Например, только порывы B ветра в направлении х или только порывы B ветра в диапазоне направления RB вокруг направления перемещения x могут быть приняты во внимание, как показано на Фиг. 3. В блоке 8 управления канатной дороги порыв B ветра также может быть учтен с разным весовым коэффициентом в зависимости от направления R, так что критические направления R порывов B ветра будут более критичными, чем другие. Какие порывы B ветра, в каком направлении R и каким образом они учитываются в блоке 8 управления канатной дороги, конечно, может быть определено и может зависеть от типа канатной дороги, от окружения канатной дороги 1, от рабочих параметров канатной дороги и т.д. Конечно, это также можно изменить во время эксплуатации канатной дороги 1.
Обнаружение скорости ветра vw или порыва B ветра и, необязательно, направления R и отклонения α предпочтительно происходит на таком расстоянии перед въездом в станцию 9, на котором транспортное средство 4 может все еще безопасно тормозиться перед станцией 2. С другой стороны, обнаружение не должно происходить на слишком большом расстоянии до въезда на станцию 9, потому что в этом случае обнаруженные значения больше не будут иметь никакого отношения к ситуации на въезде на станцию 9. Какое расстояние является подходящим, конечно, зависит от соответствующей канатной дороги 1. В большинстве случаев определение данных должно осуществляться на расстоянии менее 80 м до въезда в станцию 9. Поэтому значения отклонения α и обнаружения порыва B ветра и, возможно, направления R предпочтительно определяются по меньшей мере по тормозному пути BW транспортного средства 4 до станции 2 (Фиг. 1). Тормозной путь BW транспортного средства 4 обычно известен. В обычных канатных дорогах 1 с максимальной скоростью движения, как правило, 7 м/с, тормозной путь BW составляет приблизительно 25-40 м в случае аварийной остановки. Часто в этой зоне перед станцией 2 есть вышка 3 канатной дороги. Таким образом, обнаружение скорости ветра vw или порыва B ветра и, возможно, направления R, может происходить на вышке 3 канатной дороги перед станцией 2.
Следовательно, приемник 14 предпочтительно расположен таким образом, чтобы дальность передачи передающего блока 13 была достаточной для того, чтобы иметь возможность принимать отклонение α с достаточно большого расстояния. Предпочтительно приемник 14 располагается внутри станции 2, но также может быть расположен в зоне станции 2 перед въездом на станцию 9. Например, приемник 14 также может быть установлен на вышке 3 канатной дороги перед станцией 2 и подключен к блоку 8 управления канатной дороги через соответствующую линию связи.
Особенно выгодным для передачи информации от транспортного средства 4 на станцию 2 является использование радиопередатчиков RF в качестве передающего устройства 13 на транспортном средстве 4, таких как RFID (радиочастотная идентификация) радиопередатчик (часто называемого меткой RFID), как поясняется с помощью Фиг. 4. Блок памяти 33 установлен в радиопередатчике RF на транспортном средстве 4, в котором, например, значения отклонения α и, необязательно, также значения скорости ветра vw или для порывов B ветра и, необязательно, направления R, могут храниться. Датчик 12 для определения отклонения α может сохранять свои значения, например, в блоке памяти 33 радиопередатчика, и датчик ветра 15 также может это делать, если последний установлен на транспортном средстве 4. Такой радиопередатчик RF может иметь очень маленький размер и поэтому может использоваться самыми разнообразными способами. В эффективном диапазоне передающей антенны 31, которая передает сигнал опроса 34, радиопередатчик RF передает ответный сигнал 35, который содержит отклонение α и, необязательно, также значение порывов B ветра и, возможно, направление R. Ответный сигнал 35 принимается передающей антенной 31 и направляется в считыватель 30, который декодирует требуемые значения из ответного сигнала 35. Считыватель 30 подключен к блоку 8 управления канатной дороги и может отправлять полученные значения в блок 8 управления канатной дороги. Группа передающих антенн 31 может быть подключена к считывающему устройству 30, как показано на Фиг. 4. Следовательно, приемник 14 в станции 2 может быть выполнен в виде считывающего устройства 30 с передающей антенной 31. Передающая антенна 31 должна быть спроектирована таким образом, чтобы сигнал опроса 34 передавался как можно дальше от станции 2 на маршрут, чтобы информация от транспортного средства 4 могла быть получена как можно раньше.
Обеспечение транспортного средства 4 электрической энергией на практике является обременительным, поскольку тогда на транспортном средстве 4 должно быть установлено устройство накопления энергии, а накопитель энергии должен заряжаться, например, во время движения через станцию. Поэтому в канатной дороге 1 часто желательно не использовать электропитание на транспортных средствах 4. Разумеется, это противоречит требованию определять отклонение α транспортного средства 4 и передавать его в блок 8 управления канатной дороги.
Следовательно, в особенно выгодном варианте выполнения на транспортном средстве 4 используется пассивный радиопередатчик, например пассивный RFID-ретранслятор, поскольку в этом случае не требуется электропитание радиопередатчика RF на транспортном средстве 4. Пассивный радиопередатчик активен только в эффективном диапазоне передающей антенны 31 считывающего устройства 30, т.е. в зоне воздействия электромагнитного поля, поскольку пассивный радиопередатчик RF получает электрическую энергию для работы от электромагнитного сигнала, излучаемого передающей антенной 31, который принимается приемной антенной 32 в радиопередатчике RF. Таким образом, датчик 12 и, возможно, также датчик ветра 15 на транспортном средстве 4 могут получать необходимую электрическую энергию от пассивного радиопередатчика RF.
Когда транспортное средство 4 приближается к станции 2, пассивный радиопередатчик RF в транспортном средстве 4 входит в зону действия передающей антенны 31, в результате чего питание включается. Затем происходит считывание датчика 12 и, возможно, также датчика ветра 15, и значение отклонения α и, возможно, значение возникновения порыва B ветра и направления R, отправляются с ответным сигналом 35 в считывающее устройство 30. Существуют радиопередатчики RF с входом датчика, так что датчик 12 и, возможно, также датчик ветра 15 также могут быть подключены непосредственно к радиопередатчику RF, чтобы считываться непосредственно через радиопередатчик RF.
Конечно, другая информация также может храниться в блоке 33 памяти радиопередатчика RF. Например, уникальный идентификатор FID транспортного средства может храниться в каждом транспортном средстве 4 в блоке хранения 33, и также может передаваться в блок 8 управления канатной дороги.
Если эффективный диапазон передающей антенны 31, необходимый для опроса требуемой транспортным средством информации с помощью радиопередатчика RF, меньше расстояния тормозного пути BW, то можно расположить считыватель 30 так, чтобы передающая антенна 31 была размещена снаружи станции 2, например, у последней вышки 3 канатной дороги перед станцией 2. Считыватель 30 может быть подключен к блоку 8 управления канатной дороги или приемнику 14 на станции 2 (беспроводной или проводной) для передачи значений отклонения α, а также, возможно, порыва B ветра и направления R.
Кроме того, значения отклонения α по маршруту между станциями 2 также могут быть получены с помощью радиопередатчика RF. Если бы на транспортном средстве 4 присутствовал, например, источник питания, датчик 12 мог бы считываться с заданной частотой дискретизации и сохраняться в блоке памяти 33. В зоне станции 2 блок памяти 33 затем может быть считан, а сохраненные значения могут быть проанализированы блоком 8 управления канатной дороги. Таким образом этого блок 8 управления канатной дороги может получить важную информацию об условиях, существующих на маршруте, которая также может быть использована для управления приводом 7 канатной дороги. При использовании пассивного радиопередатчика RF, считыватель 30 может быть расположен на по меньшей мере некоторых вышках канатной дороги вдоль маршрута, благодаря чему датчик 12, а также предпочтительно идентификатор FID транспортного средства могут считываться в зоне вышки канатной дороги. Обнаруженное таким образом значение из датчика может быть сохранено в блоке памяти 33 и/или может быть передано от вышки канатной дороги к блоку 8 управления канатной дороги. На станции 2 блок хранения 33 может затем считываться с помощью считывателя 30. В этом случае требуется электропитание на вышке канатной дороги и, возможно, также подключение для передачи данных к блоку 8 управления канатной дороги.
Канал связи между транспортным средством 4 и блоком 8 управления канатной дороги, то есть, например, блоком 8 управления канатной дороги, считывающим устройством 30, передающей антенной 31, радиопередатчиком RF, конечно, также может быть сконфигурирован так, чтобы быть функционально отказоустойчивым, например, в соответствии с требуемым уровнем надежности для безопасности (SIL) для обеспечения безопасной связи в смысле функциональной безопасности (то есть в том смысле, что ошибка обнаруживается немедленно, и система затем предпочтительно переключается в безопасное состояние). Для этой цели могут быть обеспечены хорошо известные механизмы, такие как многоканальное аппаратное обеспечение, избыточность данных, методы обнаружения ошибок и исправления ошибок при передаче данных и т.д. Например, временная метка может быть добавлена к каждому сигналу 34, 35 или к данным, переносимым в нем. Если временные базы считывателя 30 и блока 8 управления канатной дороги синхронизированы, может быть обнаружено отклонение метки времени от синхронизированного времени управления, которое может, например, привести к остановке канатной дороги 1. Кроме того, может быть обеспечено, что блок памяти 33 радиопередатчика RF должен считываться несколько раз в течение заданного периода времени, чтобы проверять передаваемые данные. Данные, передаваемые в ответном сигнале 35, могут быть защищены избыточными данными, например, с помощью CRC (циклического избыточного кода). Конечно, возможны и дальнейшие меры по обеспечению функциональной безопасности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |
| РАСПОЗНАВАНИЕ ПРОЕЗДА ДЛЯ КАНАТНОЙ ДОРОГИ | 2020 |
|
RU2765526C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА (ВАРИАНТЫ) | 2008 |
|
RU2481212C2 |
| Канатная дорога | 2024 |
|
RU2838270C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ КАНАТНОЙ ДОРОГИ | 2018 |
|
RU2729160C1 |
| КАНАТНАЯ ДОРОГА | 2011 |
|
RU2518545C2 |
| Автоматизированная система управления пассажирской подвесной канатной дорогой | 2024 |
|
RU2822719C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2014 |
|
RU2653648C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2518544C2 |
| СТАНЦИЯ ДЛЯ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 2013 |
|
RU2598488C2 |
Изобретение относится к способу эксплуатации канатной дороги и к соответствующей канатной дороге. Согласно изобретению отклонение транспортного средства (4) до въезда на станцию измеряют посредством датчика (12) и передают в блок (8) управления канатной дороги, причем одновременно блок (8) управления канатной дороги обнаруживает возникновение порывов (B) ветра перед въездом на станцию (9), при этом блок (8) управления канатной дороги управляет приводом (7) канатной дороги в зависимости от переданного отклонения (α) и обнаруженного порыва (B) ветра. В результате обеспечивается возможность более надежно оценивать и реагировать на потенциальную опасность, когда транспортное средство канатной дороги въезжает на станцию канатной дороги. 2 н. и 10 з.п. ф-лы, 4 ил.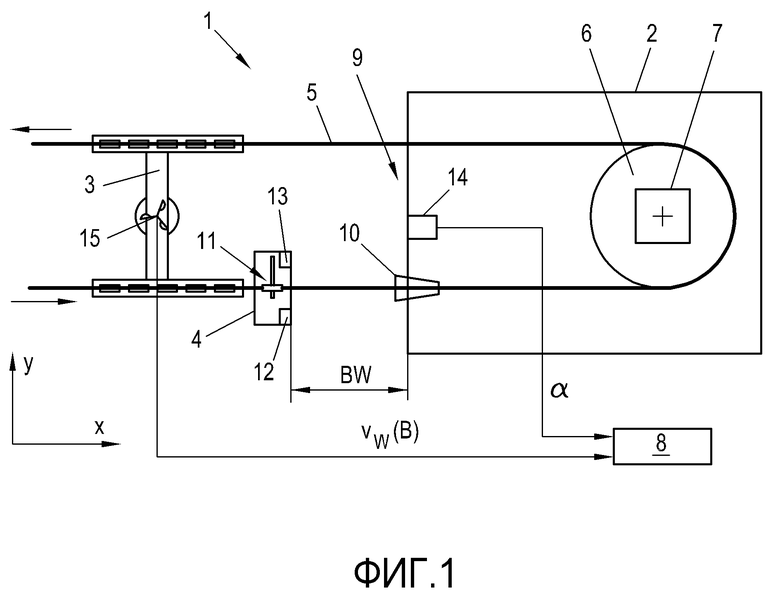
1. Способ эксплуатации канатной дороги (1), в котором по меньшей мере одно транспортное средство (4), подвешенное на подъемном канате (5), перемещают между по меньшей мере двумя станциями (2), на по меньшей мере одном транспортном средстве (4) канатной дороги (1) с помощью датчика (12) измеряют отклонение (α) транспортного средства (4) от вертикали, причем отклонение (α) транспортного средства (4) измеряют перед входом на станцию и передают в блок (8) управления канатной дороги, отличающийся тем, что одновременно определяют возникновение порыва (B) ветра, как временное изменение скорости ветра (vw), с помощью блока (8) управления канатной дороги посредством датчика (15) ветра, установленного на вышке (3) канатной дороги перед въездом на станцию (9), причем блок (8) управления канатной дороги объединяет передаваемое отклонение (α) транспортного средства (4) и обнаруженный порыв (В) ветра для управления приводом (7) канатной дороги в зависимости от переданного отклонения (α) и обнаруженного порыва (В) ветра.
2. Способ по п.1, отличающийся тем, что направление (R) порыва (B) ветра определяют с помощью блока (8) управления канатной дороги и учитывают при управлении приводом (7) канатной дороги.
3. Способ по п.2, отличающийся тем, что блок (8) управления канатной дороги учитывает порывы (В) ветра только определенного направления (R).
4. Способ по п.2, отличающийся тем, что порывы (В) ветра разных направлений (R) учитываются в блоке (8) управления канатной дороги по-разному.
5. Способ по любому из пп.1-4, отличающийся тем, что отклонение транспортного средства (4) и возникновение порыва (В) ветра обнаруживают с помощью блока (8) управления канатной дороги на расстоянии до въезда (9) на станцию, которое больше тормозного пути (BW) транспортного средства (4).
6. Способ по любому из пп.2-4, отличающийся тем, что направление (R) порыва (В) ветра определяют с помощью блока (8) управления канатной дороги на расстоянии до въезда (9) на станцию, которое больше тормозного пути (BW) транспортного средства (4).
7. Способ по любому из пп.1-6, отличающийся тем, что отклонение (α) транспортного средства (4) передают на блок (8) управления канатной дороги с помощью радиопередатчика (RF) на транспортном средстве (4).
8. Способ по п.7, отличающийся тем, что используют пассивный радиопередатчик (RF), причем пассивный радиопередатчик (RF) получает электрическую энергию для передачи отклонения (α) из сигнала (34) опроса, принятого радиопередатчиком (RF).
9. Способ по п.8, отличающийся тем, что транспортное средство (4) получает электрическую энергию для считывания датчика (12) от пассивного радиопередатчика (RF).
10. Канатная дорога с по меньшей мере одним транспортным средством (4), подвешенным на подъемном канате, которое размещено с возможностью перемещения между по меньшей мере двумя станциями (2), причем имеется датчик (12) для определения отклонения (α) транспортного средства (4) от вертикали, расположенный на по меньшей мере одном транспортном средстве (4) канатной дороги, обеспечен блок (8) управления канатной дороги, который соединен с приводом (7) канатной дороги и управляет приводом (7) канатной дороги, имеется передающее устройство (13,) расположенное на транспортном средстве (4) для передачи отклонения (α) транспортного средства (4), измеренного датчиком (12) перед въездом (9) на станцию, на приемник (14) в зоне станции (2), причем приемник (14) подключен к блоку управления канатной дороги (8) и приемник (14) выполнен с возможностью передачи отклонения (α) на блок (8) управления канатной дороги, отличающаяся тем, что перед вышкой (3) канатной дороги перед въездом на станцию (9) установлен датчик (15) ветра, который подключен к блоку (8) управления канатной дороги и выполнен с возможностью обнаружения возникновения порыва (В) ветра как временного изменения скорости ветра (vw) перед въездом (9) на станцию и с возможностью передачи данных об обнаруженном порыве (В) ветра на блок (8) управления канатной дороги, причем блок (8) управления канатной дороги объединяет передаваемое отклонение (α) транспортного средства (4) и обнаруженный порыв (В) ветра для управления приводом (7) канатной дороги в зависимости от переданного отклонения (α) и обнаруженного порыва (В) ветра.
11. Канатная дорога по п.10, отличающаяся тем, что на транспортном средстве (4) обеспечен радиопередатчик (RF) в качестве передающего устройства (13), а приемник (14) выполнен в виде считывающего устройства (30) для радиопередатчика (RF).
12. Канатная дорога по п.11, отличающаяся тем, что пассивный радиопередатчик (RF) обеспечен как радиопередатчик (RF), а считывающее устройство (30) передает сигнал (34) опроса через передающую антенну (31), который принимается радиопередатчиком (RF), и получает от него электрическую энергию для работы радиопередатчика (RF) и датчика (12).
| 1972 |
|
SU411982A1 | |
| Система для управления процессом приготовления трехкомпонентных газовых смесей | 1991 |
|
SU1837264A1 |
| JP 2006335076 A, 14.12.2006 | |||
| 0 |
|
SU257923A1 | |
| Гаситель поперечных колебаний вагона подвесной канатной дороги | 1984 |
|
SU1222587A1 |

