Изобретение касается канатной дороги, имеющей две конечные станции, между которыми по меньшей мере на одном тяговом канате может двигаться по меньшей мере одна вагонетка канатной дороги, и имеющей по меньшей мере одну расположенную между этими конечными станциями опору канатной дороги для направления указанного по меньшей мере одного тягового каната, причем эта опора канатной дороги распространяется в продольном направлении тягового каната по длине опоры канатной дороги между двумя противоположными концами опоры, при этом в области первого конца опоры предусмотрена область въезда для въезда вагонетки канатной дороги в опору канатной дороги, а в области второго конца опоры предусмотрена область выезда для выезда вагонетки канатной дороги из опоры канатной дороги. Также изобретение касается обнаруживающего устройства для опоры канатной дороги, распространяющейся в продольном направлении направляемого по опоре канатной дороги тягового каната по длине опоры канатной дороги между двумя противоположными концами опоры, для распознавания проезда вагонеток канатной дороги, а также способа распознавания проезда вагонеток канатной дороги на опоре канатной дороги, распространяющейся в продольном направлении направляемого по опоре канатной дороги тягового каната по длине опоры канатной дороги между двумя противоположными концами опоры, при этом по меньшей мере одна вагонетка канатной дороги движется на тяговом канате через опору канатной дороги.
Канатные дороги существуют в самых разных вариантах осуществления, чаще всего для транспортировки людей и/или грузов, например, в виде средства городского транспорта или для транспортировки людей на горнолыжных курортах. При этом известны фуникулеры, у которых чаще всего рельсовые транспортные средства закреплены на проволочном канате, чтобы тянуться этим проволочным каналом. При этом движение осуществляется по земле, причем фуникулеры чаще всего применяются на горных участках или во внутригородской области. У подвесных канатных дорог, в отличие от этого, вагонетки канатной дороги, такие как, например, гондолы, кабины или кресла без жестких направляющих переносятся одним или несколькими (проволочными) канатами и движутся, вися в воздухе. То есть вагонетки канатных дорог не имеют контакта с землей. Подвесные канатные дороги применяются, как правило, на непроходимой местности, чаще всего для горных участков, например, на горнолыжных курортах, чтобы перевозить людей из долины на гору, а также во внутригородской области для перевозки людей. Как правило, канатные дороги имеют две или несколько станций, между которыми движутся вагонетки канатной дороги.
При этом следует различать кольцевые дороги и маятниковые дороги. У маятниковых дорог одна или две вагонетки канатной дороги, которые тянутся буксировочным канатом, курсируют челночным способом по тяговому канату или по рельсам по одному пути движения между двумя станциями туда и обратно. Кольцевая канатная дорога, в отличие от этого, имеет между станциями бесконечный, постоянно циркулирующий тяговый канат, на котором, вися, расположены множество вагонеток канатной дороги, таких как гондолы или кресла. Таким образом, эти вагонетки канатной дороги движутся с одной стороны от одной станции к другой, а с противоположной стороны снова обратно. Поэтому движение вагонеток канатной дороги осуществляется всегда по существу непрерывно в одном направлении, аналогично конвейеру непрерывного действия.
Чтобы можно было покрывать также большие дистанции, между двумя станциями, как правило, расположена одна или несколько опор канатной дороги для направления указанного/указанных (несущих/тяговых) канатов. Опоры канатной дороги могут быть выполнены в виде стальной фахверковой конструкции, а также в виде стальной трубчатой или листовой коробчатой конструкции. На одной опоре канатной дороги чаще всего расположены несколько роликов, например, в виде так называемой роликовой батареи, чтобы нести и направлять канат. У кольцевых дорог вагонетки канатных дорог, как правило, закреплены на тяговом канате на определенном расстоянии друг от друга. Чтобы обеспечивать как можно более равномерную нагрузку на тяговый канат, а также на опоры канатной дороги, расстояния между вагонетками канатной дороги у одной канатной дороги чаще всего равны. Расстояние между вагонетками канатной дороги может, конечно, варьироваться в зависимости от конкретного исполнения канатной дороги. Например, расстояние между креслами одной канатной дороги в связи с меньшей нагрузкой может быть меньше, чем расстояние между гондолами гондольной дороги.
У современных кольцевых дорог вагонетки канатной дороги соединены с тяговым канатом, как правило, не жестко, а посредством открываемых канатных зажимов. Благодаря этому вагонетки канатной дороги могут отцепляться от тягового каната на станциях и двигаться через станцию с более низкой скоростью относительно скорости тягового каната. В частности, при перевозке людей благодаря этому повышается комфорт и безопасность пассажиров, потому что имеется в распоряжении больше времени на посадку и высадку. Затем при выезде из станции вагонетки канатной дороги снова зажимаются на тяговом канате посредством канатных зажимов. При этом предпочтительно вагонетки канатной дороги снова ускоряются до скорости циркулирующего тягового каната, чтобы избежать резкого ускорения и толчкообразных нагрузок. В связи с тенденцией к большей провозной способности и более коротким периодам транспортировки, наряду с размером, соответственно, вместимостью вагонеток канатной дороги, в последние годы повысилась, конечно, также скорость перевозки тягового каната. Обстоятельство отцепления вагонеток канатной дороги на станциях и все более высокие скорости перевозки, конечно, тоже должны учитываться при установлении расстояния между отдельными вагонетками канатной дороги. Наряду с этим, существуют еще канатные дороги, имеющие фиксированным образом зажатые на тяговом канате вагонетки канатной дороги.
Как правило, вследствие расстояний между вагонетками канатной дороги на одной опоре канатной дороги (по меньшей мере в направлении движения) между областью въезда в роликовую батарею и областью выезда из роликовой батареи находится только по одной вагонетке канатной дороги. Для повышения эксплуатационной безопасности канатной дороги и безопасности пассажиров и для уменьшения опасности повреждений на роликовых батареях часто бывают предусмотрены сенсоры положения каната. Эти сенсоры положения каната предусмотрены, чтобы распознавать отклонения положения тягового каната в роликовой батарее от заданного роликами номинального положения каната. Если распознается отклонение, канатная дорога может при определенных обстоятельствах останавливаться, скорость снижаться и/или подаваться предупреждающий сигнал. Благодаря этому повышается безопасность, в частности, при высоких скоростях ветра, потому что, например, может надежно распознаваться выскакивание тягового каната из роликов роликовой батареи. Благодаря этому при определенных обстоятельствах эксплуатация канатной дороги может поддерживаться дольше.
Однако могут возникать ситуации, при которых отклоняющееся положение каната не обнаруживается, но которые, несмотря на это, могут приводить к повреждениям и/или к угрозе для пассажиров. Например, вагонетка канатной дороги может качаться поперек направления движения вокруг тягового каната, например, вследствие порывов ветра, без отклонения недопустимым образом положения тягового каната в роликовой батарее опоры канатной дороги от номинального положения каната. Когда это движение качания слишком сильное, при въезде или проезде вагонетки канатной дороги через роликовую батарею опоры канатной дороги при определенных обстоятельствах это может приводить к тому, что области вагонетки канатной дороги будут сталкиваться с областями опоры канатной дороги. Такое столкновение в худшем случае может приводить к блокированию вагонетки канатной дороги в области опоры канатной дороги без распознавания сенсором положения каната отклоняющегося положения каната. Канатные зажимы в целях безопасности, как правило, рассчитаны так, что они, начиная с определенного сопротивления между вагонетками канатной дороги и тяговым канатом, допускают проскальзывание тягового каната (конечно, без разъединения зажима). Такая блокированная вагонетка канатной дороги не может без затруднений распознаваться управлением канатной дороги. Когда опора канатной дороги не просматривается из станции канатной дороги, блокированная вагонетка канатной дороги не может также распознаваться эксплуатационным персоналом.
Описанный сценарий мог бы, следовательно, приводить к тому, что вагонетки канатной дороги в области опоры канатной дороги будут блокированы, и тяговый канат будет двигаться через канатный зажим по существу с неизменной скоростью относительно вагонетки канатной дороги. И в дальнейшем это могло бы приводить к тому, что следующая вагонетка канатной дороги будет въезжать в область опоры канатной дороги и сталкиваться с уже заблокированной в ней вагонеткой канатной дороги и, со своей стороны, блокироваться. Когда положение каната при этом также не изменяется недопустимым образом, это может приводить к цепной реакции, вплоть до столкновения нескольких других следующих вагонеток канатной дороги.
Задача настоящего изобретения заключается, следовательно, в том, чтобы повысить безопасность канатной дороги, в частности при проезде вагонетки канатной дороги через опору канатной дороги.
Задача в соответствии с изобретением решается таким образом, что на по меньшей мере одной опоре канатной дороги предусмотрено обнаруживающее устройство, имеющее по меньшей мере один блок оценки и имеющее по меньшей мере два соединенных с блоком оценки сенсора, при этом первый сенсор расположен в области въезда опоры канатной дороги, чтобы распознавать присутствие вагонетки канатной дороги в области регистрации первого сенсора, а второй сенсор расположен в области выезда опоры канатной дороги, чтобы распознавать присутствие вагонетки канатной дороги в области регистрации второго сенсора, при этом обнаруживающее устройство предусмотрено, чтобы определять количество вагонеток канатной дороги между первым сенсором и вторым сенсором и создавать сигнал ошибки, когда определяемое количество превышает заданное максимальное количество.
Предпочтительно канатная дорога имеет блок управления для управления канатной дорогой, который предусмотрен, чтобы обрабатывать сигнал ошибки обнаруживающего устройства, причем этот блок управления управляет канатной дорогой в зависимости от этой обработки. Благодаря этому канатная дорога может, например, автоматически приостанавливаться, когда имеется сигнал ошибки. Альтернативно или дополнительно при получении сигнала ошибки может также автоматически подаваться предпочтительно оптический и/или акустический предупреждающий сигнал, например, чтобы указывать эксплуатационному персоналу на место нарушения.
Сенсоры предпочтительно предусмотрены, чтобы при распознавании присутствия вагонетки канатной дороги в области регистрации сенсора создавать значение сенсора и передавать в блок оценки, и при этом блок оценки предусмотрен, чтобы обрабатывать полученные значения сенсоров, чтобы определять количество вагонеток канатной дороги между первым сенсором в области въезда и вторым сенсором в области выезда опоры канатной дороги и создавать сигнал ошибки, когда определяемое количество превышает заданное максимальное количество. Благодаря этой относительно простой конструкции может реализовываться надежное распознавание проезда для вагонеток канатной дороги.
Предпочтительно блок оценки предусмотрен, чтобы инкрементировать значение счетчика на шаговое значение, когда первый сенсор в области въезда дает значение сенсора, и декрементировать это значение счетчика на шаговое значение, когда второй сенсор в области выезда дает значение сенсора, или наоборот, и предусмотрен, чтобы создавать сигнал ошибки, когда значение счетчика превышает заданное значение счетчика. Благодаря этому реализуется относительно простая логика распознавания проезда.
Предпочтительно предусмотрено начальное значение счетчика, равное нулю, и предусмотрено шаговое значение, равное единице, при этом блок оценки предусмотрен, чтобы при значении счетчика больше единицы создавать сигнал ошибки. Благодаря этому блок оценки распознает, когда между областью въезда и областью выезда находятся больше одной вагонетки канатной дороги, когда значение счетчика превышает значение единицы, и может инициировать сигнал ошибки.
По одному другому предпочтительному варианту осуществления предусмотрено, что для редундантного (резервного) определения количества вагонеток канатной дороги и/или для определения направления движения вагонетки канатной дороги предусмотрены по меньшей мере два сенсора, находящихся в продольном направлении на расстоянии друг от друга, в области въезда, и по меньшей мере два сенсора, находящихся в продольном направлении на расстоянии друг от друга, в области выезда опоры канатной дороги. Благодаря этому, например, можно выполнять требования определенного уровня SIL (англ. safety integrity level, уровень полноты безопасности) и минимизировать риск выхода обнаруживающего устройства из строя.
Предпочтительно предусмотрен по меньшей мере один блок оценки для каждой опоры канатной дороги, чтобы обрабатывать значения сенсоров каждой опоры канатной дороги, или предусмотрен один блок оценки для нескольких опор канатной дороги, чтобы обрабатывать значения сенсоров нескольких опор канатной дороги. При этом количество подлежащих оценке сенсоров может адаптироваться к производительности блока оценки, соответственно, наоборот. Но когда канатная дорога имеет достаточно мощный блок управления, можно также обходиться без отдельного блока оценки, и оценка значений сенсоров осуществляться в блоке управления.
Предпочтительно по меньшей мере один сенсор представляет собой индуктивный сенсор, который предусмотрен, чтобы распознавать канатный зажим вагонетки канатной дороги, которым вагонетка канатной дороги закреплена на тяговом канате. Тем самым обеспечено простое и надежное распознавание вагонеток канатной дороги.
Задача решается также с помощью обнаруживающего устройства тем, что это обнаруживающее устройство имеет по меньшей мере один блок оценки и по меньшей мере два соединенных с блоком оценки сенсора, при этом по меньшей мере один первый сенсор предусмотрен для расположения в области въезда на первом конце опоры канатной дороги, чтобы распознавать присутствие вагонетки канатной дороги в области регистрации первого сенсора, и по меньшей мере один второй сенсор предусмотрен для расположения в области выезда на втором конце опоры канатной дороги, чтобы распознавать присутствие вагонетки канатной дороги в области регистрации второго сенсора, и что это обнаруживающее устройство предусмотрено, чтобы определять количество вагонеток канатной дороги между первым сенсором и вторым сенсором и создавать сигнал ошибки, когда определяемое количество превышает заданное максимальное количество.
Также задача решается с помощью способа распознавания проезда тем, что вагонетка канатной дороги движется в предусмотренную в области первого конца опоры канатной дороги область въезда, при этом по меньшей мере один предусмотренный в области въезда первый сенсор распознает присутствие вагонетки канатной дороги в области регистрации первого сенсора и передает значение сенсора в блок оценки, что вагонетка канатной дороги движется из области въезда в предусмотренную в области второго конца опоры область выезда опоры канатной дороги, при этом по меньшей мере один предусмотренный в области выезда второй сенсор распознает присутствие вагонетки канатной дороги в области регистрации второго сенсора и передает значение сенсора в блок оценки, и что блок оценки обрабатывает полученные значения сенсоров, чтобы определять количество вагонеток канатной дороги между первым сенсором и вторым сенсором, и создает сигнал ошибки, когда определяемое количество превышает заданное максимальное количество.
Ниже настоящее изобретение поясняется подробнее со ссылкой на фиг.1-2c, на которых примерно, схематично и не ограничивающим образом показаны предпочтительные варианты осуществления изобретения. При этом показано:
фиг.1: верхний участок опоры канатной дороги с тяговым канатом и закрепленной на нем вагонеткой канатной дороги на виде сбоку;
фиг.2a-2c: роликовая батарея опоры канатной дороги с канатным зажимом вагонетки канатной дороги в разных положениях.
На фиг.1 изображена опора 1 канатной дороги, по которой посредством роликовой батареи 4 направляется тяговый канат 3 канатной дороги. На тяговом канате расположена в подвешенном состоянии посредством канатного зажима 6 (открываемого или зажатого фиксированным образом) вагонетка 5 канатной дороги. Канатная дорога выполнена здесь в виде кольцевой дороги, в частности, в виде гондольной дороги, при этом вагонетка 5 канатной дороги выполнена в виде гондолы. Но конечно, возможны были бы и другие варианты канатных дорог, такие как, например, кресельная дорога, имеющая вагонетки 5 канатной дороги, выполненные в виде кресел, или же подъемники с бугелями (скобами). Возможна была бы также смешанная эксплуатация с чередующимися гондолой и креслом. Канатная дорога имеет, как правило, две (не изображенные подробно) конечные станции 14, между которыми посредством тягового каната 3 движутся обычно несколько вагонеток 5 канатной дороги. Для этого вагонетки 5 канатной дороги закреплены на тяговом канате 3 на определенном расстоянии друг от друга, при этом крепление осуществляется предпочтительно посредством канатных зажимов 6. В некоторых вариантах осуществления могут быть также предусмотрены несколько параллельных тяговых канатов 3 и при известных условиях циркулирующий или движущийся туда и обратно буксировочный канат. Хотя в следующем примере изобретение поясняется только на одном тяговом канате 3, но конечно, изобретение может также применяться к канатным дорогам, имеющим несколько тяговых канатов 3 и/или буксировочных канатов.
Между конечными станциями 14 канатной дороги расположена по меньшей мере одна опора 1 канатной дороги, причем, как правило, предусмотрены несколько опор 1 канатной дороги. Количество опор 1 канатной дороги ориентируется, например, на дистанцию между конечными станциями 14 канатной дороги и на ожидаемую нагрузку от вагонеток 5 канатной дороги, а также на топологию местности, в которой эксплуатируется канатная дорога. Опоры 1 канатной дороги служат для того, чтобы нести и направлять тяговый канат 3. Простоты ради, на фиг.1 изображен только верхний участок опоры 1 канатной дороги, а также только одна вагонетка 5 канатной дороги и участок тягового каната 3 в области опоры 1 канатной дороги. Для направления тягового каната 3 на опоре 1 канатной дороги расположена так называемая роликовая батарея 4. Эта роликовая батарея 4 может иметь лонжерон 7, на котором расположены друг за другом несколько роликов 8. Ролики 8 установлены с возможностью вращения на роликовой батарее 4, например, на лонжероне 7, и служат для того, чтобы нести и направлять по бокам тяговый канат 3. Таким образом, роликовая батарея 4 опирает нагрузку тягового каната 3, включая закрепленные на нем вагонетки 5 канатной дороги, через опору 1 канатной дороги на землю.
Опора 1 канатной дороги распространяется в продольном направлении тягового каната 3 на определенную длину L опоры канатной дороги между двумя противоположными концами SE1, SE2 опоры. В области первого конца SE1 опоры предусмотрена область E въезда для въезда вагонетки 5 канатной дороги в опору 1 канатной дороги, а в области второго конца SE2 опоры предусмотрена область A выезда для выезда вагонетки 5 канатной дороги из опоры 1 канатной дороги. В изображенном примере концы SE1, SE2 опоры образованы концами роликовой батареи 4. Но конечно, концы SE1, SE2 опоры могли бы быть также предусмотрены в какой-либо другой части опоры 1 канатной дороги, например, на направляющем устройстве для направления тягового каната 3 или на платформе для технического обслуживания опоры 1 канатной дороги. Длина области E въезда и области A выезда составляет предпочтительно до одной трети длины L опоры 1 канатной дороги.
В показанном примере движение канатной дороги в нормальном режиме осуществляется так, что вагонетки 5 канатной дороги движутся справа, соответственно, снизу влево, соответственно, вверх как обозначено стрелкой. Это означает, что вагонетка 5 канатной дороги въезжает в область E въезда опоры 1 канатной дороги, соответственно, в частности, роликовой батареи 4, затем движется вдоль роликовой батареи 4 до области A выезда и в области A выезда выдвигается из роликовой батареи 4. При изменении направления канатной дороги на противоположное эта последовательность, конечно, логичным образом изменяется на противоположную. Опора 1 канатной дороги у кольцевой канатной дороги может также иметь (не изображенную) противоположную вторую роликовую батарею 4, которая служит для направления противоположной части циркулирующего тягового каната 3. На второй роликовой батарее 4 область E въезда и область A выезда расположены наоборот. Вторая роликовая батарея 4 имеет аналогичный принцип действия.
В соответствии с изобретением по меньшей мере на одной опоре 1 канатной дороги предусмотрено обнаруживающее устройство 9, имеющее по меньшей мере один блок 16 оценки и по меньшей мере два соединенных с блоком 16 оценки сенсора 15. При этом первый сенсор 15 расположен в области E въезда опоры 1 канатной дороги, чтобы распознавать присутствие вагонетки 5 канатной дороги в области регистрации первого сенсора 15. В области A выезда опоры 1 канатной дороги расположен второй сенсор 15, чтобы распознавать присутствие вагонетки 5 канатной дороги в области регистрации второго сенсора 15. Обнаруживающее устройство 9 предусмотрено, чтобы определять количество i вагонеток 5 канатной дороги между первым сенсором 15 и вторым сенсором 15 и создавать сигнал F ошибки, когда определяемое количество i превышает заданное максимальное количество imax. Предпочтительно канатная дорога имеет также блок 11 управления для управления канатной дорогой, который предусмотрен, чтобы обрабатывать сигнал F ошибки обнаруживающего устройства 9 и управлять канатной дорогой в зависимости от этой обработки. Поэтому блок 11 управления может вмешиваться в эксплуатацию канатной дороги, например, чтобы приостанавливать канатную дорогу, снижать скорость и/или чтобы посредством сигнального устройства 12 создавать акустический и/или оптический предупреждающий сигнал, например, в блоке вывода блока 11 управления. Блок 11 управления изображен на фиг.1 только схематично и может быть расположен, например, в конечной станции 14, чтобы управлять устройством 13 привода канатной дороги, таким как, например, электродвигатель, когда блок 11 управления получает от обнаруживающего устройства 9 сигнал F ошибки.
Сигнальное устройство 12 могло бы, например, иметь динамик 12a для подачи акустического предупреждающего сигнала и/или блок 12b освещения для подачи оптического предупреждающего сигнала и/или вывод в блоке вывода, такой как, например, дисплей. Сигнальное устройство 12 может быть предусмотрено, например, в одной или обеих конечных станциях 14 и/или на одной или нескольких опорах 1 канатной дороги. При расположении в конечной станции 14 предупреждающий сигнал мог бы, например, восприниматься эксплуатационным персоналом на конечной станции 14, без прямой видимости опоры 1 канатной дороги, на которой обнаруживающим устройством 9 создается сигнал F ошибки.
Сенсоры 15 предпочтительно предусмотрены, чтобы при распознавании присутствия вагонетки 5 канатной дороги в области регистрации сенсора 15 создавать значение SW сенсора и передавать в блок 16 оценки. Этот блок 16 оценки предпочтительно предусмотрен, чтобы обрабатывать полученные значения SW сенсоров для определения количества i вагонеток 5 между первым сенсором 15 в области E въезда и вторым сенсором 15 в области A выезда опоры 1 канатной дороги. Когда определяемое количество i превышает заданное максимальное количество imax, блок 16 оценки создает сигнал F ошибки и передает этот сигнал F ошибки предпочтительно в блок 11 управления канатной дороги. Когда на роликовой батарее 4, как уже описано, предусмотрены один или несколько сенсоров 18 для регистрации положения тягового каната 3 (обозначено на фиг.1), сенсоры 15 обнаруживающего устройства 9 могли бы, например, также быть подключены к блоку оценки сенсоров 18 положения каната, который тогда также выполняет функцию блока 16 оценки обнаруживающего устройства 9. Конечно, возможен был бы также обратный случай, когда сенсоры 18 положения каната подключаются к блоку 16 оценки обнаруживающего устройства 9. Тогда блок 16 оценки обнаруживающего устройства 9 (или блок оценки сенсоров 18 положения каната) мог бы быть предусмотрен, например, как для оценки значений SW сенсоров 15 обнаруживающего устройства 9, так и для оценки сенсоров 18 положения каната. Но конечно, могли бы быть также предусмотрены (не изображенный) отдельный блок оценки для сенсоров 18 положения каната, который, например, поддерживает связь с блоком 16 оценки и/или с блоком 11 управления канатной дороги. Также сенсоры 18 положения каната дополнительно к распознаванию положения каната могли бы также функционировать в качестве сенсоров 15 для распознавания проезда вагонеток 5 канатной дороги.
Но предпочтительно для редундантного определения количества i вагонеток 5 канатной дороги предусмотрены по меньшей мере два находящихся на расстоянии друг от друга в продольном направлении сенсора 15 в области E въезда и по меньшей мере два находящихся на расстоянии друг от друга в продольном направлении сенсора 15 в области A выезда. Благодаря такому редундантному исполнению сенсорики могут выполняться определенные требования к функциональной безопасности, такие как, например, уровень SIL3 (safety integrity level 3). В зависимости от уровня SIL, должны выполняться разные требования для минимизации риска неправильного функционирования системы. Соответствующие детали известны специалисту. В изображенном примере, имеющем только по одному сенсору 15 в области E, A въезда и выезда выход из строя сенсора 15 приводил бы к выходу из строя всей системы. При редундантном исполнении даже при выходе из строя сенсора 15 в области E, A въезда или выезда было бы обеспечено нормальное функционирование обнаруживающего устройства 9. Предпочтительно блок 16 оценки предусмотрен, чтобы распознавать выход из строя или неправильное функционирование сенсора 15, например, передавать в блок 11 управления. Блок 11 управления мог бы, например, подавать соответствующий сигнал, например, на экране, чтобы сигнализировать эксплуатационному персоналу о выходе из строя или неправильном функционировании. Благодаря этому соответствующий сенсор 15 мог бы заблаговременно подвергаться техническому обслуживанию или при известных условиях заменяться, прежде чем произойдет выход из строя всего обнаруживающего устройства 9.
Расположение по меньшей мере двух сенсоров 15 в области E въезда и в области A выезда может предпочтительно использоваться также для того, чтобы определять направление движения вагонетки 5 канатной дороги. Для этого сенсоры 15 расположены в направлении движения друг за другом на расстоянии друг от друга. Благодаря этому распознавание вагонетки 5 канатной дороги и создание значений SW сенсоров осуществляется со сдвигом во времени при проезде вагонетки 5 канатной дороги мимо сенсоров 15.
Предпочтительно предусмотрен по меньшей мере один блок 16 оценки для каждой опоры канатной дороги, чтобы обрабатывать значения SW сенсоров 15 каждой опоры 1 канатной дороги. Но мог бы быть также предусмотрен блок 16 оценки для нескольких опор 1 канатной дороги, чтобы обрабатывать значения SW сенсоров 15 нескольких опор 1 канатной дороги. Необходимая для этого связь между опорами могла бы осуществляться, например, проводным путем по кабелю или же беспроводным путем, например, по радио. Например, для редундантного осуществления обработки сигнала на одной опоре 1 канатной дороги могли бы быть также предусмотрены по меньшей мере два блока 16 оценки, чтобы выполнять требования определенного уровня SIL.
По одному из предпочтительных вариантов осуществления по меньшей мере один сенсор 15 выполнен в виде индуктивного сенсора, который предусмотрен, чтобы распознавать некоторую часть вагонетки 5 канатной дороги, в частности канатный зажим 6 вагонетки 5 канатной дороги. Но предпочтительно все сенсоры 15 являются индуктивными сенсорами. Конструкция и принцип действия индуктивных сенсоров известны в уровне техники. По существу индуктивный сенсор посредством катушки создает магнитное поле в области вблизи сенсора. Когда в область регистрации сенсора вторгается электрически проводящий объект, магнитное поле изменяется, и изменение магнитного поля распознается сенсором, причем этот сенсор создает значение SW сенсора. В настоящем примере на фиг.1 индуктивный сенсор 15 расположен в области E въезда на лонжероне 7 роликовой батареи 4, а индуктивный сенсор 15 расположен в области A выезда на лонжероне 7 роликовой батареи 4. Сенсоры 15 расположены так, что они при проезде мимо них вагонетки 5 канатной дороги взаимодействуют с канатным зажимом 6, чтобы создавать значение SW сенсора. Канатный зажим 6 выполнен обычно из электропроводящего материала или имеет по меньшей мере некоторую область, имеющую электропроводящий материал, которая взаимодействует с (индуктивными) сенсорами 15.
Сенсоры 15 соединены с блоком 16 оценки, чтобы передавать значения SW сенсоров в блок 16 оценки. Соединение осуществляется предпочтительно по надлежащим проводам, так, как указано на фиг.1, но альтернативно могло бы также осуществляться беспроводным путем. Блок 16 оценки обрабатывает полученные значения SW сенсоров и определяет из них количество i вагонеток 5 канатной дороги, которые находятся между областью E въезда и областью A выезда, в частности между расположенными в каждой из них сенсорами 15.
Предпочтительно оценка блоком 16 аналитической обработки осуществляется за счет того, что блок 16 оценки инкрементирует значение Z счетчика на шаговое значение W, когда первый сенсор 15 в области E въезда дает значение SW сенсора, и декрементирует значение Z счетчика на шаговое значение W, когда второй сенсор в области A выезда дает значение SW сенсора, или наоборот. Когда значение Z счетчика превышает заданное значение ZV счетчика, блок 16 оценки создает сигнал F ошибки и посылает его предпочтительно в блок 11 управления канатной дороги. Но блок 16 оценки мог бы также посылать сигнал F ошибки прямо в сигнальное устройство 12, чтобы создавать акустический и/или оптический сигнал. Таким образом, блок 16 оценки служит для распознавания проезда вагонеток 5 канатной дороги, при этом способ распознавания проезда еще поясняется в деталях ниже с помощью фиг.2a-2c.
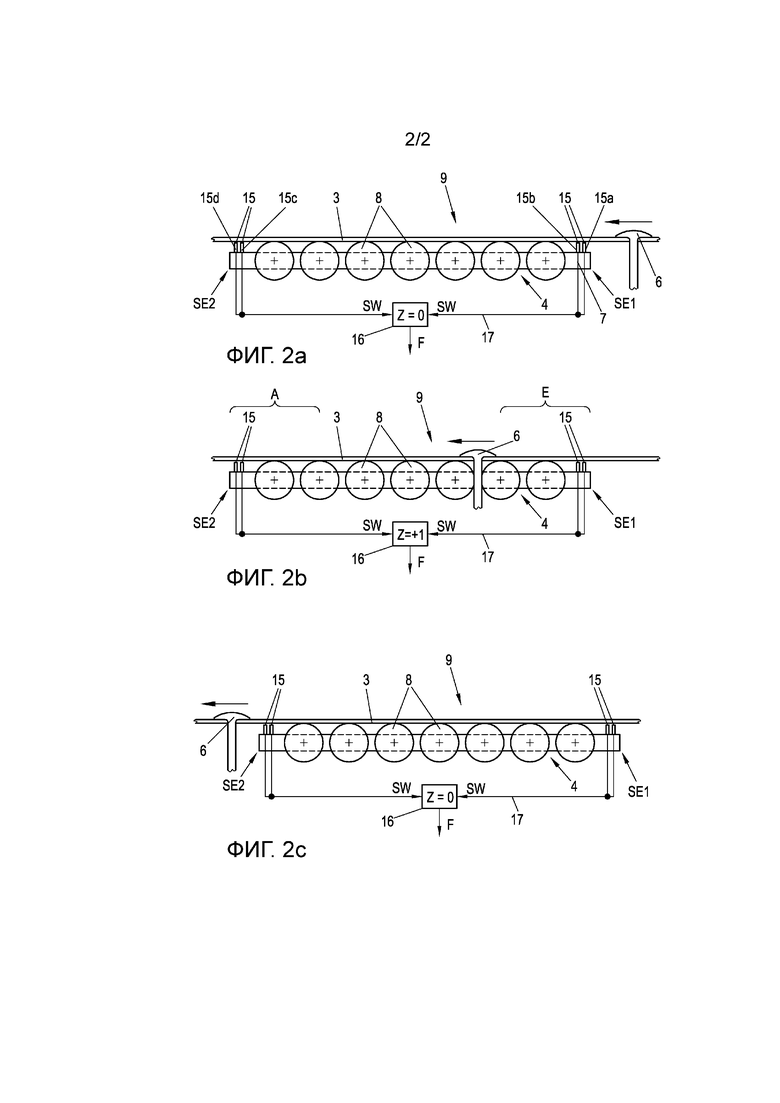
На фиг.2a-2c предпочтительный процесс выполнения предлагаемого изобретением способа показан на упрощенном изображении роликовой батареи 4 (не изображенной) опоры 1 канатной дороги. Концы SE1, SE2 опоры образованы концами лонжерона 7 роликовой батареи 4. Область E въезда для вагонетки 5 канатной дороги предусмотрена в области первого конца SE1 опоры, а область A выезда для вагонетки 5 канатной дороги предусмотрена в области второго конца SE2 опоры. На тяговом канате 3 канатным зажимом 6 закреплена вагонетка 5 канатной дороги, причем эта вагонетка 5 канатной дороги в целях обзорности изображена только частично. Вследствие движения тягового каната 3 канатный зажим 6 вместе с висящей на нем вагонеткой 5 канатной дороги движется по роликовой батарее 4, здесь справа налево, как указано стрелкой. Как только канатный зажим 6 приходит в область регистрации первого сенсора 15, сенсор 15 распознает присутствие канатного зажима 6, создает значение SW сенсора и посылает его в блок 16 оценки, например, по надлежащему сенсорному проводу 17. В изображенном примере в целях редундантности друг за другом в направлении движения тягового каната 3 предусмотрены по два сенсора 15 в области E въезда и в области A выезда. Область E въезда и область A выезда распространяется предпочтительно по длине, которая составляет до одной трети длины L опоры канатной дороги, то есть в показанном примере больше одной трети длины лонжерона 7 роликовой батареи 4. Чтобы увеличить область распознавания проезда, предпочтительно, когда сенсоры располагаются каждый как можно ближе к соответствующему концу SE1, SE2 опоры.
Дополнительно к повышению отказоустойчивости сенсоры 15 могли бы, как описано, применяться для определения направления движения. Блок 16 оценки мог бы обрабатывать значения SW всех сенсоров 15 опоры 1 канатной дороги, но мог бы, например, также игнорировать некоторые значения SW сенсоров. Например, после получения значения SW сенсора могло бы быть реализовано определенное «мертвое время» t, в течение которого блок 16 оценки игнорирует следующие получаемые значения SW сенсоров. Это «мертвое время» t могло бы устанавливаться, например, в зависимости от скорости тягового каната 3 и расстояния между двумя сенсорами 15 области E, A въезда и/или выезда. Это могло бы означать, что блок 16 оценки после получения значения SW первого сенсора 15 некоторое установленное «мертвое время» t игнорирует следующие значения SW сенсоров, здесь, например, значение SW второго сенсора 15b.
По истечении «мертвого времени» t блок 16 оценки мог бы, например, применять следующее получаемое значение SW сенсора для оценки, здесь значение SW третьего сенсора 15c. Поле получения значения SW третьего сенсора 15c могло бы быть снова реализовано «мертвое время» t, чтобы игнорировать следующее полученное значение SW сенсора (здесь четвертого сенсора 15d). Но конечно, блок 16 оценки мог бы быть также предусмотрен, чтобы попарно по существу редундантно обрабатывать значения SW сенсоров. Отсюда могло бы, например, определяться неправильное функционирование или выход из строя сенсора 15.
Но возможно было бы также, например, чтобы в блоке 16 оценки было реализовано определенное заданное время прохождения вагонетки 5 канатной дороги. Это время прохождения может получаться, например, из скорости тягового каната 3 (которая соответствует скорости вагонетки 5 канатной дороги) и расстояния между указанным сенсором/указанными сенсорами 15 в области E въезда и указанным сенсором/указанными сенсорами 15 в области A выезда. Тогда блок 16 оценки мог бы, например, также создавать сигнал F ошибки, когда время между получением значения SW указанного сенсора/указанных сенсоров 15 в области E въезда и получением значения SW указанного сенсора/указанных сенсоров 15 в области A выезда превышает заданное время прохождения, при необходимости с учетом некоторого времени допуска. Время прохождения могло бы также определяться, например, из текущей скорости тягового каната 3, которая, например, могла бы предоставляться блоком 11 управления или могла бы определяться блоком 16 оценки посредством сенсоров 15 (в нормальном режиме при постоянной скорости, если нет нарушения, по расстоянию между сенсорами 15 и времени между получением значений SW сенсоров). Кроме того, скорость тягового каната 3 могла бы также определяться другими сенсорами опоры 1 канатной дороги и передаваться в блок 16 оценки, например, сенсорами 18 положения каната для регистрации положения каната.
Предпочтительно в блоке 16 оценки предусмотрено начальное значение счетчика Z=0, и предусмотрено шаговое значение W=1, при этом блок оценки предусмотрен, чтобы создавать сигнал F ошибки, когда значение счетчика составляет Z˃1, как изображено в представленном примере. На фиг.2a канатный зажим 6 вагонетки 5 канатной дороги движется в направлении опоры 1 канатной дороги, однако находится еще перед областью E въезда. Начальное значение Z счетчика составляет Z=0. На фиг.2b канатный зажим 6 прошел через сенсоры 15 области E въезда и находится на роликовой батарее 4 между областью E въезда и областью A выезда. По меньшей мере один из сенсоров 15 области E въезда передал значение SW сенсора в блок 16 оценки, вследствие чего блок 16 оценки инкрементирует начальное состояние счетчика Z=0 на шаговое значение W=1 до значения счетчика Z=1. На фиг.2c канатный зажим 6 прошел через сенсоры 15 области A выезда. По меньшей мере один из сенсоров 15 области A выезда передал значение SW сенсора в блок 16 оценки, вследствие чего блок 16 оценки декрементирует значение счетчика Z=1 на шаговое значение W=1 до значения счетчика Z=0. То, что значение Z счетчика не превышает значение счетчика Z=1, означает, что между областью E въезда и областью A выезда находится, соответственно, находился только один канатный зажим 6 и тем самым только одна вагонетка 5 канатной дороги.
Если бы, например, как уже описано, произошло блокирование вагонетки 5 канатной дороги между областью E въезда и областью A выезда, и канатный зажим 6 следующей вагонетки 5 канатной дороги стал бы проходить через область E въезда, значение счетчика Z=1 повысилось бы на шаговое значение W до значения счетчика Z=2. Поэтому блок 16 оценки инициировал бы сигнал F ошибки и предпочтительно послал бы его в блок 11 управления канатной дороги, чтобы при известных условиях остановить канатную дорогу. Предпочтительно блок 16 оценки имеет (не изображенный) блок памяти, чтобы в случае отключения канатной дороги запоминать текущее значение Z счетчика. Благодаря этому распознавание проезда может продолжаться после повторного пуска канатной дороги.
Конечно, описанный вариант осуществления изобретения следует понимать только в качестве примера, и на усмотрение специалиста остается произвести определенные конструктивные изменения обнаруживающего устройства 9 и/или изменения логики оценки. Например, могли бы также применяться другие сенсоры 15, которые способны распознавать вагонетки канатной дороги. Возможны были бы, например, оптические сенсоры, емкостные сенсоры, световые затворы, магнитные сенсоры, механические сенсоры и пр.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ ИЗНОСА КАНАТНОГО РОЛИКА УСТАНОВКИ КАНАТНОЙ ДОРОГИ | 2020 |
|
RU2774918C1 |
| ОПОРА КАНАТНОЙ ДОРОГИ, ИМЕЮЩАЯ УСТРОЙСТВО ДЛЯ ПЕРЕХОДА | 2020 |
|
RU2772495C1 |
| СПОСОБ КОНТРОЛЯ ПРОХОЖДЕНИЯ ВАГОНЕТКИ В УСТАНОВКЕ ДЛЯ ПЕРЕВОЗОК ПО ПОДВЕСНОЙ КАНАТНОЙ ДОРОГЕ | 2010 |
|
RU2526330C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ КАНАТНОЙ ДОРОГИ | 2018 |
|
RU2729160C1 |
| СТАНЦИЯ ДЛЯ ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 2013 |
|
RU2598488C2 |
| Канатно-подвесная дорога | 1933 |
|
SU43912A1 |
| ПЕРЕДВИЖНАЯ РАЗГРУЗОЧНАЯ СТАНЦИЯ ПОДВЕСНОЙ ДВУХКАНАТНОЙ ДОРОГИ | 1973 |
|
SU399419A1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2014 |
|
RU2653648C1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА (ВАРИАНТЫ) | 2008 |
|
RU2481212C2 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА | 2004 |
|
RU2292280C2 |

Изобретение относится к канатной дороге. Согласно изобретению по меньшей мере на одной опоре (1) канатной дороги предусмотрено обнаруживающее устройство (9), имеющее по меньшей мере один блок (16) оценки и имеющее по меньшей мере два соединенных с блоком (16) оценки сенсора (15). При этом первый сенсор (15) расположен в области (E) въезда опоры (1) канатной дороги, чтобы распознавать присутствие вагонетки (5) канатной дороги в области регистрации первого сенсора (15), а второй сенсор (15) расположен в области (A) выезда опоры канатной дороги, чтобы распознавать присутствие вагонетки (5) канатной дороги в области регистрации второго сенсора (15). Обнаруживающее устройство (9) предусмотрено, чтобы определять количество (i) вагонеток (5) канатной дороги между первым сенсором (15) и вторым сенсором (15) и создавать сигнал (F) ошибки, когда определяемое количество (i) превышает заданное максимальное количество (imax). В результате повышается безопасность канатной дороги. 3 н. и 15 з.п. ф-лы, 4 ил.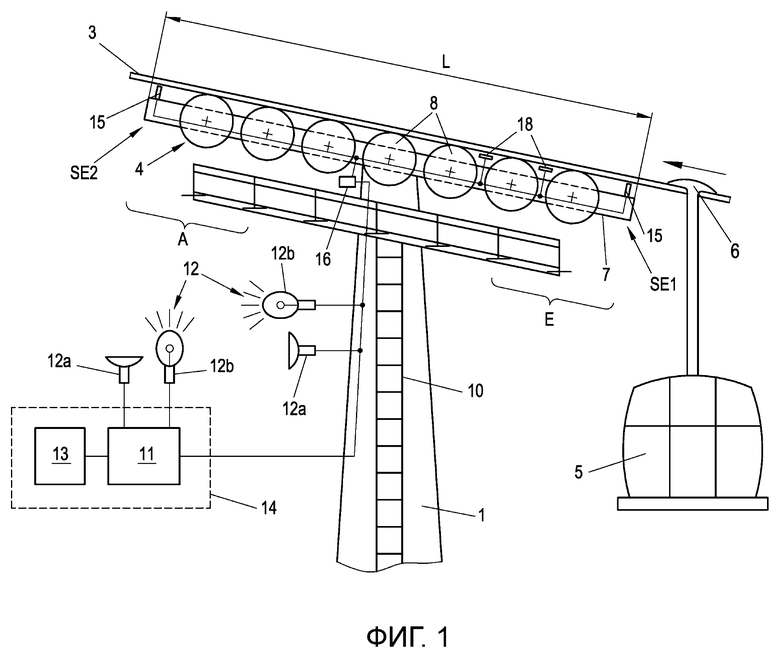
1. Канатная дорога, имеющая две конечные станции (14), между которыми на по меньшей мере одном тяговом канате (3) имеет возможность перемещения по меньшей мере одна вагонетка (5) канатной дороги, и имеющая по меньшей мере одну расположенную между этими конечными станциями (14) опору (1) канатной дороги для направления указанного по меньшей мере одного тягового каната (3), причем эта опора (1) канатной дороги распространяется в продольном направлении тягового каната (3) по длине опоры канатной дороги между двумя противоположными концами этой опоры, причем в области первого конца опоры предусмотрена область (E) въезда для въезда вагонетки (5) канатной дороги в опору (1) канатной дороги, а в области второго конца опоры предусмотрена область (A) выезда для выезда вагонетки (5) канатной дороги из опоры (1) канатной дороги, отличающаяся тем, что на по меньшей мере одной опоре (1) канатной дороги предусмотрено обнаруживающее устройство (9), имеющее по меньшей мере один блок (16) оценки и по меньшей мере два соединенных с блоком (16) оценки сенсора (15), причем первый сенсор (15) расположен в области (E) въезда опоры (1) канатной дороги, чтобы распознавать присутствие вагонетки (5) канатной дороги в области регистрации первого сенсора (15), а второй сенсор (15) расположен в области (A) выезда опоры канатной дороги, чтобы распознавать присутствие вагонетки (5) канатной дороги в области регистрации второго сенсора (15), причем обнаруживающее устройство (9) предусмотрено, чтобы определять количество (i) вагонеток (5) канатной дороги между первым сенсором (15) и вторым сенсором (15) и создавать сигнал (F) ошибки, когда определяемое количество (i) превышает заданное максимальное количество (imax).
2. Канатная дорога по п.1, отличающаяся тем, что канатная дорога имеет блок (11) управления для управления канатной дорогой, который предусмотрен, чтобы обрабатывать сигнал (F) ошибки обнаруживающего устройства (9), причем этот блок (11) управления управляет канатной дорогой в зависимости от этой обработки.
3. Канатная дорога по п.1 или 2, отличающаяся тем, что сенсоры (15) предусмотрены, чтобы при распознавании присутствия вагонетки (5) канатной дороги в области регистрации сенсора (15) создавать значение (SW) сенсора и передавать в блок (16) оценки, и при этом блок (16) оценки предусмотрен, чтобы обрабатывать полученные значения (SW) сенсоров, чтобы определять количество (i) вагонеток (5) канатной дороги между первым сенсором (15) в области (E) въезда и вторым сенсором (15) в области (A) выезда опоры (1) канатной дороги и создавать сигнал (F) ошибки, когда определяемое количество (i) превышает заданное максимальное количество (imax).
4. Канатная дорога по одному из пп.1-3, отличающаяся тем, что блок (16) оценки предусмотрен, чтобы инкрементировать значение (Z) счетчика на шаговое значение (W), когда первый сенсор (15) в области (E) въезда дает значение (SW) сенсора, и декрементировать значение (Z) счетчика на шаговое значение (W), когда второй сенсор (15) в области (A) выезда дает значение (SW) сенсора, или наоборот, и причем блок (16) оценки предусмотрен, чтобы создавать сигнал (F) ошибки, когда значение (Z) счетчика превышает заданное значение (Z) счетчика.
5. Канатная дорога по п.4, отличающаяся тем, что предусмотрено начальное значение (Z) счетчика Z=0, и предусмотрено шаговое значение (W), составляющее W=1, при этом блок (16) оценки предусмотрен, чтобы создавать сигнал (F) ошибки при значении (Z) счетчика Z˃1.
6. Канатная дорога по одному из пп.3-5, отличающаяся тем, что для редундантного определения количества (i) вагонеток (5) канатной дороги и/или для определения направления движения вагонетки (5) канатной дороги предусмотрены по меньшей мере два находящихся в продольном направлении на расстоянии друг от друга сенсора (15) в области (E) въезда и по меньшей мере два находящихся в продольном направлении на расстоянии друг от друга сенсора (15) в области (A) выезда опоры (1) канатной дороги.
7. Канатная дорога по одному из пп.1-6, отличающаяся тем, что предусмотрен по меньшей мере один блок (16) оценки для каждой опоры (1) канатной дороги, чтобы обрабатывать значения (SW) сенсоров (15) каждой опоры (1) канатной дороги, или предусмотрен один блок (16) оценки для нескольких опор (1) канатной дороги, чтобы обрабатывать значения (SW) сенсоров (15) нескольких опор (1) канатной дороги.
8. Канатная дорога по одному из пп.3-7, отличающаяся тем, что по меньшей мере один сенсор (15) представляет собой индуктивный сенсор (15), который предусмотрен, чтобы распознавать канатный зажим (6) вагонетки (5) канатной дороги, которым вагонетка (5) канатной дороги закреплена на тяговом канате (3).
9. Обнаруживающее устройство (9) для опоры (1) канатной дороги, распространяющейся в продольном направлении направляемого по опоре (1) канатной дороги тягового каната (3) по длине опоры канатной дороги между двумя противоположными концами опоры, для распознавания проезда вагонеток (5) канатной дороги, отличающееся тем, что это обнаруживающее устройство (9) имеет по меньшей мере один блок (16) оценки и по меньшей мере два соединенных с блоком (16) оценки сенсора (15), причем по меньшей мере один первый сенсор (15) предусмотрен для расположения в области (E) въезда на первом конце опоры (1) канатной дороги, чтобы распознавать присутствие вагонетки (5) канатной дороги в области регистрации первого сенсора (15), а по меньшей мере один второй сенсор (15) предусмотрен для расположения в области (A) выезда на втором конце опоры (1) канатной дороги, чтобы распознавать присутствие вагонетки (5) канатной дороги в области регистрации второго сенсора (15), и причем это обнаруживающее устройство (9) предусмотрено, чтобы определять количество (i) вагонеток (5) канатной дороги между первым сенсором (15) и вторым сенсором (15) и создавать сигнал (F) ошибки, когда определяемое количество (i) превышает заданное максимальное количество (imax).
10. Обнаруживающее устройство (9) по п.9, отличающееся тем, что сенсоры (15) предусмотрены, чтобы при распознавании присутствия вагонетки (5) канатной дороги создавать значение (SW) сенсора и передавать в блок (16) оценки, и причем блок (16) оценки предусмотрен, чтобы обрабатывать полученные значения (SW) сенсоров, чтобы определять количество (i) вагонеток (5) канатной дороги между областью (E) въезда и областью (A) выезда опоры (1) канатной дороги и создавать сигнал (F) ошибки, когда определяемое количество (i) превышает заданное максимальное количество (imax).
11. Обнаруживающее устройство (9) по п.9 или 10, отличающееся тем, что блок (16) оценки предусмотрен, чтобы инкрементировать значение (Z) счетчика на шаговое значение (W), когда первый сенсор (15) в области (E) въезда дает значение (SW) сенсора, и декрементировать значение (Z) счетчика на шаговое значение (W), когда второй сенсор (15) в области (A) выезда дает значение (SW) сенсора, или наоборот, и причем блок (16) оценки предусмотрен, чтобы создавать сигнал (F) ошибки, когда значение (Z) счетчика превышает заданное значение (Z) счетчика.
12. Обнаруживающее устройство (9) по п.11, отличающееся тем, что предусмотрено начальное значение (Z) счетчика, составляющее Z=0, и предусмотрено шаговое значение (W), составляющее W=1, причем блок (16) оценки предусмотрен, чтобы создавать сигнал (F) ошибки при значении (Z) счетчика Z˃1.
13. Обнаруживающее устройство (9) по одному из пп.9-12, отличающееся тем, что в этом обнаруживающем устройстве (9) для редундантного определения количества (i) вагонеток (5) канатной дороги и/или для определения направления движения вагонетки (5) канатной дороги предусмотрены по меньшей мере два сенсора (15) для расположения в продольном направлении на расстоянии друг от друга в области (E) въезда и по меньшей мере два сенсора (15) для расположения в продольном направлении на расстоянии друг от друга в области (A) выезда опоры (1) канатной дороги.
14. Обнаруживающее устройство (9) по одному из пп.9-13, отличающееся тем, что по меньшей мере один сенсор (15) представляет собой индуктивный сенсор (15), который предусмотрен, чтобы распознавать канатный зажим (6) вагонетки (5) канатной дороги, которым вагонетка (5) канатной дороги может крепиться на тяговом канате (3).
15. Способ распознавания проезда вагонеток (5) канатной дороги по опоре (1) канатной дороги, распространяющейся в продольном направлении направляемого по опоре (1) канатной дороги тягового каната (3) по длине опоры канатной дороги между двумя противоположными концами опоры, причем по меньшей мере одну вагонетку (5) канатной дороги перемещают на тяговом канате (3) через опору (1) канатной дороги, отличающийся тем, что вагонетку (5) канатной дороги перемещают в предусмотренную в области первого конца опоры (1) канатной дороги область (E) въезда, причем по меньшей мере один предусмотренный в области (E) въезда первый сенсор (15) распознает присутствие вагонетки (5) канатной дороги в области регистрации первого сенсора (15) и передает значение (SW) сенсора в блок (15) оценки, причем вагонетку (5) канатной дороги перемещают из области (E) въезда в предусмотренную в области второго конца опоры область (A) выезда опоры (1) канатной дороги, причем по меньшей мере один предусмотренный в области (A) выезда второй сенсор (15) распознает присутствие вагонетки (5) канатной дороги в области регистрации второго сенсора (15) и передает значение (SW) сенсора в блок (16) оценки, и причем блок (16) оценки обрабатывает полученные значения (SW) сенсоров, чтобы определять количество (i) вагонеток (5) канатной дороги между первым и вторым сенсором (15), и создает сигнал (F) ошибки, когда определяемое количество (i) превышает заданное максимальное количество (imax).
16. Способ по п.15, отличающийся тем, что сигнал (F) ошибки передают в блок (11) управления для управления канатной дорогой, причем блок (11) управления управляет канатной дорогой в зависимости от этой обработки.
17. Способ по п.15 или 16, отличающийся тем, что блок (16) аналитической обработки инкрементирует значение (Z) счетчика на шаговое значение (W), когда первый сенсор (15) в области (E) въезда дает значение (SW) сенсора, и декрементирует значение (Z) счетчика на шаговое значение (W), когда второй сенсор (15) в области (A) выезда дает значение (SW) сенсора, или наоборот, и причем блок (16) оценки создает сигнал (F) ошибки, когда значение (Z) счетчика превышает заданное значение (Z) счетчика.
18. Способ по п.17, отличающийся тем, что используют начальное значение (Z) счетчика, составляющее Z=0, и используют шаговое значение (W), составляющее W=1, причем блок (16) оценки создает сигнал (F) ошибки при значении (Z) счетчика Z˃1.
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |
| US 4003314 A, 18.01.1977 | |||
| Система для управления процессом приготовления трехкомпонентных газовых смесей | 1991 |
|
SU1837264A1 |
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА (ВАРИАНТЫ) | 2008 |
|
RU2481212C2 |

