Одной из задач экологического обслуживания территорий является оздоровление водоемов и водотоков путем внесения жидкостных препаратов.
Процесс внесения препаратов производится на водных объектах мануально, прямой заливкой из канистр или дозирующих емкостей, с берега и с транспортных средств - лодок, катеров. При повышении объема мероприятий, проводимых на объектах, требований в части регламента, нормативов выполнения работ,
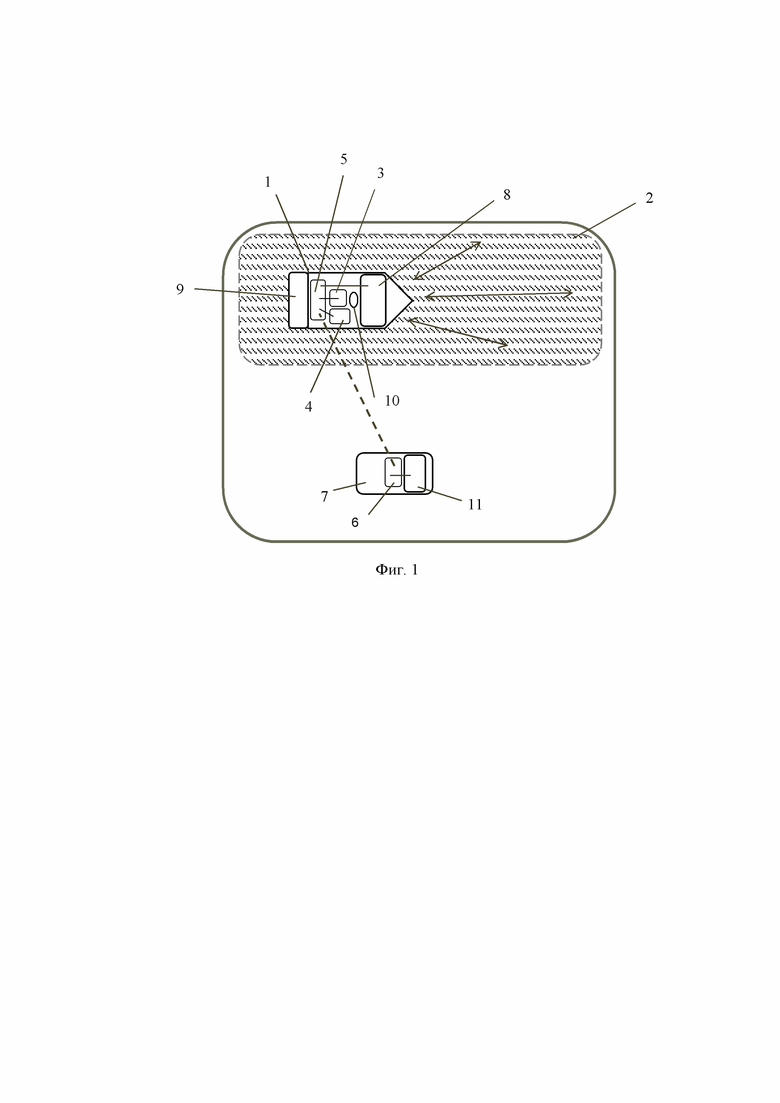
актуальной является комплексная автоматизация процессов оздоровления водных объектов с внесением жидкостных препаратов, для решения которой применяется роботизированный комплекс, архитектура которого приведена на фиг. 1:
транспортное судно на воздушной подушке (СВП) 1 - носитель основного оборудования, перемещаемого по водным объектам 2 и береговым территориям;
установленный на транспортном судне манипулятор 3 для загрузки жидкостного препарата в заборную емкость и перелива на поверхность водного объекта; краткое наименование: «Манипулятор внесения препарата»;
установленный на транспортном судне накопительный бак с жидкостным препаратом 4, оснащенный люком для погружения заборной емкости, манипулятором защитной крышки люка, лопастной мешалкой жидкости, датчиком уровня жидкости в баке, фиксаторами переливаемых в бак канистр с препаратом; краткое наименование: «Бак жидкостного препарата»;
информационно-управляющая система (ИУС) 5 в составе подсистем: транспортного судна, манипулятора внесения препарата и бака жидкостного препарата;
система дистанционного контроля и управления (СДКУ) 6, с возможностью установки на внедорожном транспортном средстве 7, размещаемом на береговых позициях объекта.
Транспортное судно применяется как беспилотное, дистанционно управляемое (из кабины внедорожного транспортного средства, с применением пульта управления СДКУ) или мануально управляемое (из каюты судна). Манипуляторы применяются как автоматические, дистанционно управляемые или мануально управляемые.
На фиг. 1: каюта транспортного судна 8; ходовой модуль СВП 9 - двигательная установка, воздушный винт, рули управления курсом и тангажом; окно 10 в днище СВП для доступа к водной поверхности; кабина внедорожного автомобиля 11.
Дополнительно в состав комплекса вводится внедорожное транспортное средство -автомобиль с прицепом-трейлером для перевозки судна на воздушной подушке.
Информационная связь между ИУС и СДКУ обеспечивается по радиоканалам.
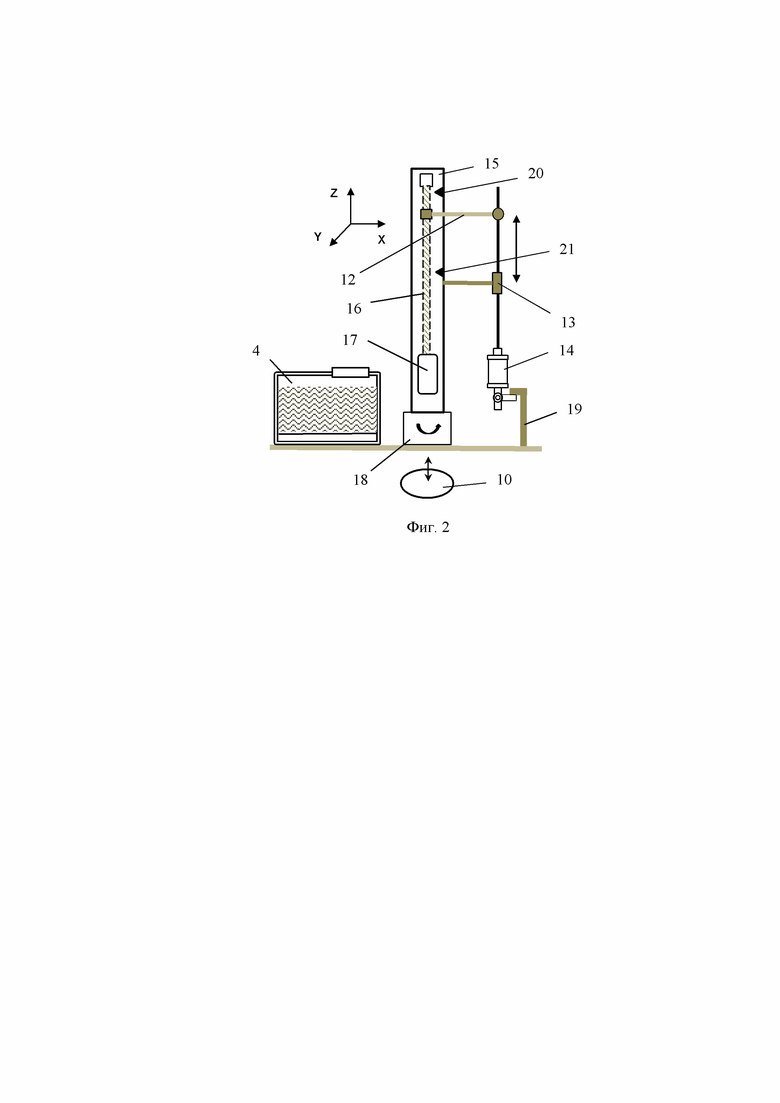
Манипулятор внесения препарата 3 состоит из набора конструктивных модулей, представленных на фиг. 2 - вид сбоку:
каретка вертикального перемещения емкости 12, с направляющей трубкой 13;
заборная емкость 14 со встроенной в верхнюю крышку открытой трубкой забора воды, со встроенным в нижнюю крышку краном выгрузки препарата, оснащенным поворотной ручкой, выходящей за стенку емкости;
колонна вертикального перемещения каретки с заборной емкостью 15, со встроенным программно управляемым линейным электроприводом: ходовой винт с гайкой 16, соединенной с кареткой, шаговый электродвигатель 17;
основание колонны 18 со встроенным блоком вращения колонны вокруг вертикальной оси с программно управляемым шаговым электроприводом;
упор 19 для перемещения поворотной ручки крана выгрузки жидкостного препарата в исходное состояние «закрыт»;
контрольные концевые выключатели 20, 21 - датчики предельных положений каретки, верхнего и нижнего.
Работа манипулятора обеспечена наличием в днище транспортного судна окна доступа к поверхности водного объекта 10, показанного на фиг. 1 и фиг. 2.
Загрузка заборной емкости производится из накопительного бака 4, показанного на фиг. 1 и фиг. 2.
Функционирование шаговых электроприводов обеспечивается подсистемой ИУС, управляющей манипулятором.
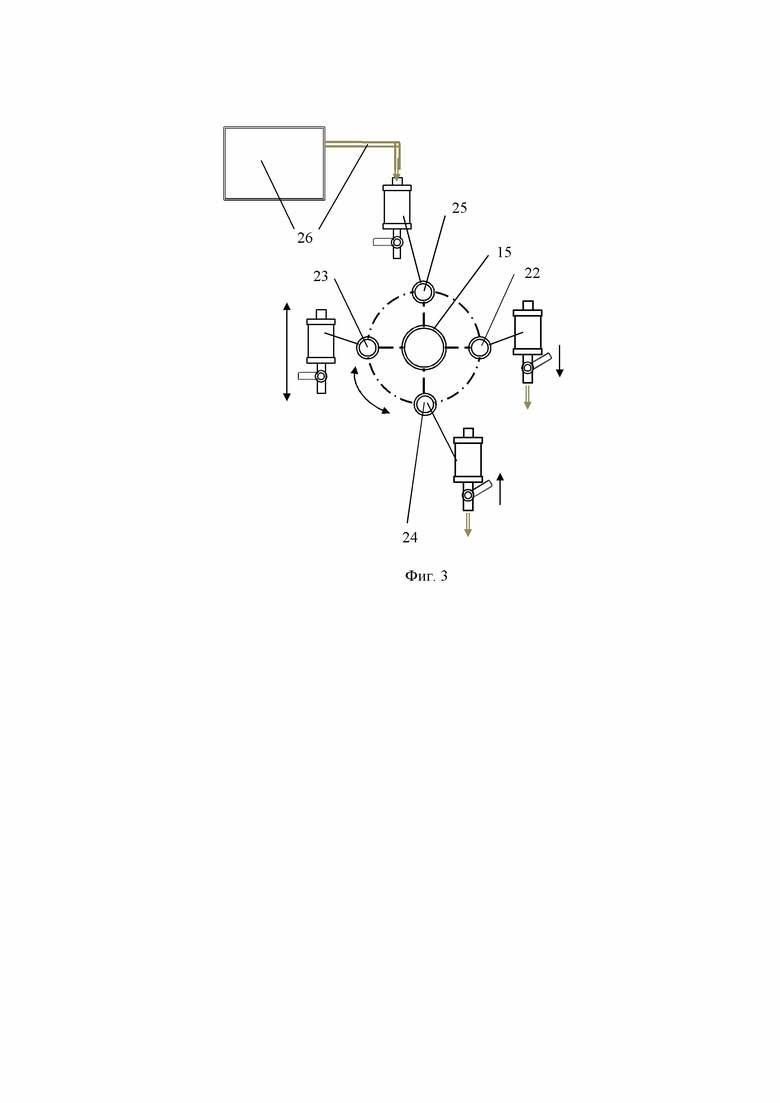
Колонна 15, фиг. 2, манипулятора внесения препарата показана также на фиг. 3 - вид сверху.
Заборная емкость 14, фиг. 2, показана на фиг. 3 с различными состояниями ручки крана, характерными для рабочих положений манипулятора: 22, 23, 24, 25.
Манипулятор в начале выполнения технологического процесса устанавливает заборную емкость 14 в исходное состояние 22, фиг. 3, с применением линейного и кругового электроприводов, упора для перемещения поворотной ручки крана,
затем циклически выполняет операции, обеспечивающие:
забор препарата через люк накопительного бака, выгрузку препарата в окно доступа к водной поверхности, промывку емкости (при необходимости, по мануальной команде оператора), возврат емкости в исходное положение.
Манипулятор, при выполнении приведенных выше операций:
перемещает заборную емкость с закрытым краном в положение 23 над люком накопительного бака, с применением кругового электропривода;
опускает емкость в бак для заполнения жидким препаратом на заданную глубину, с заданной скоростью;
выдерживает емкость в баке на заданной глубине, в течение заданного для заполнения препаратом времени;
выводит емкость из люка, поднимает на высоту, требуемую для перемещения к окну; перемещает емкость в положение 24 для выгрузки препарата в окно доступа к водной поверхности;
опускает заборную емкость в окно доступа к водной поверхности, в положении, обеспечивающем открытие крана перемещением ручки крана в положение «открыт» упором в стенку окна;
выдерживает емкость над окном в течение заданного для выгрузки препарата времени;
поднимает заборную емкость для вывода из окна;
перемещает емкость из положения 24 в положение 22, затем обеспечивает закрытие крана, с применением упора 19, фиг. 2, перемещением емкости вверх.
При наличии мануальной команды оператора на промывку емкости, до перевода емкости в исходное состояние, манипулятор:
перемещает емкость в положение 25, поднимает емкость для ввода в верхнюю трубку емкости штуцера соединения с блоком промывочной жидкости 26, на время заполнения емкости;
перемещает заборную емкость в положение 24, затем обеспечивает открытие крана при опускании емкости с заданной скоростью в окно 10 - поворот ручки крана в положение «открыто» упором в край окна;
выдерживает емкость в положении, заданном для сброса в окно промывочной жидкости, в течение заданного времени, затем поднимает емкость вверх, извлекает из окна; промывка завершена;
возвращает емкость в исходное состояние, 22, с применением линейного и кругового электроприводов, упора для перемещения поворотной ручки крана.
Блок промывочной жидкости 26, фиг. 3, установленный на транспортном судне, содержит: бак с жидкостью, программно управляемый от ИУС насос, соединительный трубопровод со штуцером ввода жидкости в пробоотборную емкость. Заполнение и выгрузка бака с промывочной жидкостью производится с применением дополнительных технических средств.
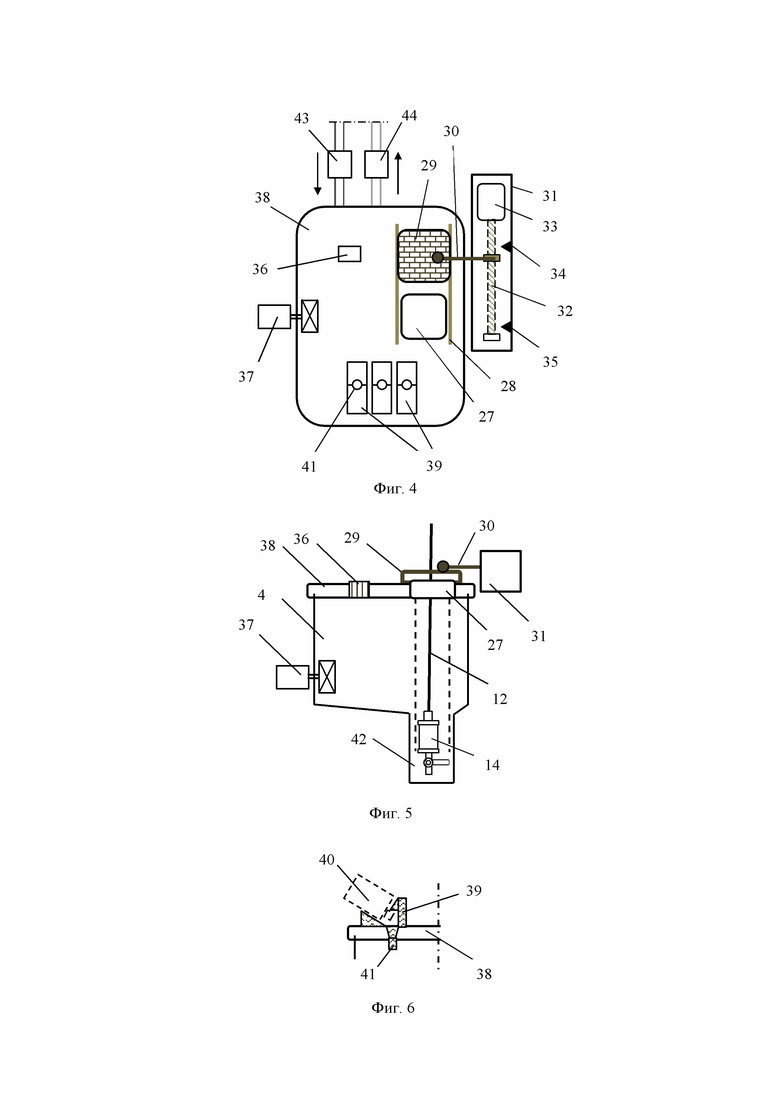
Накопительный бак жидкостного препарата 4, фиг. 1, состоит из модулей, показанных на фиг. 4 - вид сверху, фиг. 5 и фиг. 6 - виды сбоку:
открытый люк бака 27, несущее основание каретки манипулятора 28 крышки люка 29;
каретка 30 с прикрепленной к ней крышкой люка;
колонна горизонтального перемещения каретки 31, со встроенным программно управляемым линейным электроприводом: ходовой винт с гайкой 32, соединенной с кареткой, и шаговый электродвигатель 33;
контрольные концевые выключатели 34, 35 - датчики предельных положений каретки;
датчик уровня жидкости в баке 36; лопастная мешалка жидкости 37.
На крышке бака 38 установлены фиксаторы 39 канистр с препаратом 40, предназначенные для перелива жидкости в накопительный бак через горловины 41.
В днище накопительного бака, фиг. 5, сформировано заглубление 42 для погружения заборной емкости 14 с применением каретки 12, фиг. 3, манипулятора внесения препарата. Заглубление обеспечивает возможность более полного извлечения препарата из бака, без применения насоса, оказывающего негативное влияние на применяемые препараты.
Промывка бака, при наличии мануальной команды оператора, обеспечивается с применением входного 43, фиг. 4, и выходного 44 насосов, с применением забортной воды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робототехнический комплекс и способ его применения для отбора проб на водоемах и водотоках | 2019 |
|
RU2726837C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| Автоматизированный стенд для испытаний крыльчаток вентиляторов | 2015 |
|
RU2610933C2 |
| КАНАЛИЗАЦИОННАЯ СЕТЬ (ВАРИАНТЫ) | 2003 |
|
RU2274709C2 |
| Контейнер из композитного материала для транспортировки живого краба | 2023 |
|
RU2809368C1 |
| СИСТЕМА ПРИГОТОВЛЕНИЯ РАБОЧЕЙ ЖИДКОСТИ ПРЕПАРАТОВ ПРОТРАВЛИВАТЕЛЯ СЕМЯН | 2017 |
|
RU2656402C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| Комплект санитарной обработки переносной | 2023 |
|
RU2836264C2 |
| РАСТВОРНЫЙ УЗЕЛ КАРБАМИДНО АММИАЧНОЙ СМЕСИ | 2018 |
|
RU2686149C1 |
| АВТОРАЗЛИВОЧНАЯ СТАНЦИЯ ДЛЯ ОБРАБОТКИ ТЕХНИКИ | 2023 |
|
RU2826037C1 |
Изобретение относится к области экологического обслуживания водных объектов с целью их оздоровления путем внесения в воду специальных жидкостных препаратов. Мобильный робототехнический комплекс содержит транспортное судно на воздушной подушке, имеющее загрузочное окно в днище судна и выполненное с возможностью автоматического или дистанционного управления, установленный на судне манипулятор для загрузки жидкостного препарата в заборную емкость и его перелива на поверхность водного объекта, установленный на транспортном судне модуль накопительного бака с жидкостным препаратом, информационно-управляющую систему (ИУС) и систему дистанционного контроля и управления (СДКУ). Использование изобретения позволяет осуществить комплексную автоматизацию процессов оздоровления водных объектов с повышением качества оздоровления. 5 н. и 1 з.п. ф-лы, 6 ил.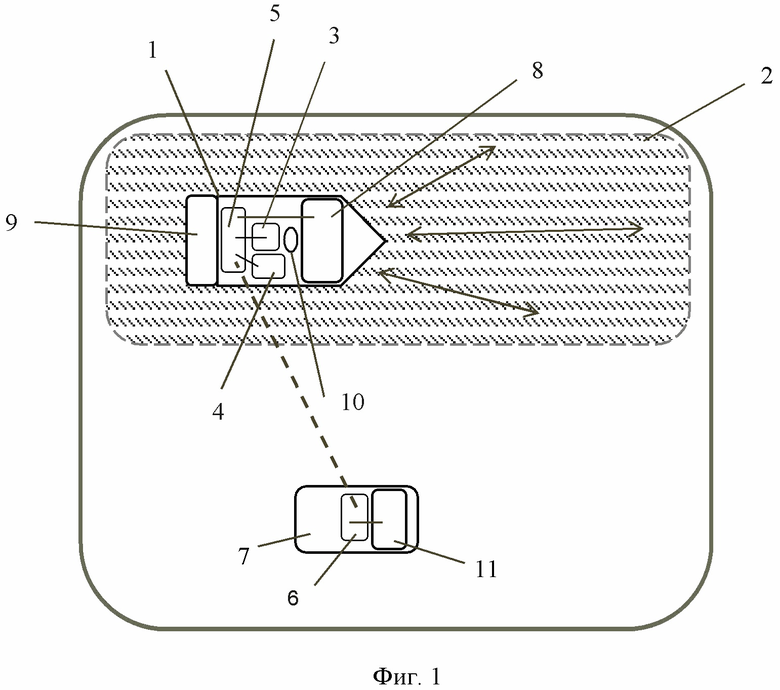
1. Мобильный робототехнический комплекс для внесения жидкостных препаратов на поверхность водного объекта, содержащий
транспортное судно на воздушной подушке, имеющее загрузочное окно в днище судна и выполненное с возможностью перемещения по водным объектам и береговым территориям посредством автоматического, дистанционного из кабины внедорожного транспортного средства или мануального из каюты транспортного судна управления,
установленный на транспортном судне манипулятор для загрузки жидкостного препарата в заборную емкость и его перелива на поверхность водного объекта, выполненный с возможностью программного автоматического, дистанционного с внедорожного транспортного средства или мануального с транспортного судна управления,
установленный на транспортном судне модуль накопительного бака с жидкостным препаратом, оснащенный люком для погружения заборной емкости,
информационно-управляющую систему (ИУС) упомянутых транспортного судна, манипулятора и модуля накопительного бака и
систему дистанционного контроля и управления (СДКУ), выполненную с возможностью установки на внедорожном транспортном средстве, размещаемом на береговых территориях водного объекта.
2. Манипулятор для загрузки жидкостного препарата в заборную емкость и его перелива на поверхность водного объекта для мобильного робототехнического комплекса по п. 1, содержащий
вертикальную колонну, выполненную с возможностью установки на транспортном судне и с возможностью вращения вокруг вертикальной оси посредством встроенного в основание колонны блока вращения с программно-управляемым электроприводом,
каретку, установленную на колонне с возможностью вертикального перемещения посредством управляемого линейного электропривода,
расположенные на колонне датчики предельных верхнего и нижнего положений каретки по вертикали, выполненные в виде концевых выключателей, и
блоки связи упомянутых электроприводов и датчиков положения с ИУС,
при этом на каретке с помощью несущего стержня установлена заборная емкость с возможностью взаимодействия с упором для перемещения поворотной ручки крана выгрузки препарата из емкости в исходное состояние крана «закрыт».
3. Модуль накопительного бака для жидкостного препарата мобильного робототехнического комплекса по п. 1, содержащий
накопительный бак заданного объема для хранения жидкостного препарата, выполненный с возможностью установки на транспортном судне,
установленный на баке люк с защитной крышкой для погружения заборной емкости,
установленный на баке датчик уровня жидкостного препарата,
установленную на баке лопастную мешалку жидкостного препарата,
манипулятор для линейного перемещения защитной крышки люка по положениям «закрыт» и «открыт», имеющий каретку, связанную с защитной крышкой, и датчики предельных положений каретки в виде концевых выключателей, и
установленные на баке в заданном количестве фиксаторы для переливаемых в бак канистр с жидкостным препаратом.
4. Заборная емкость для мобильного робототехнического комплекса по п. 1, содержащая
загрузочный цилиндрический модуль заданного объема со съемными нижней и верхней крышкой,
открытую входную ограничительную трубку, встроенную в верхнюю крышку,
выпускной кран с выходным патрубком и с упорной поворотной ручкой, встроенный в нижнюю крышку,
при этом упомянутая ручка выполнена с возможностью установки состояния крана «закрыт» или «открыт».
5. Способ внесения жидкостных препаратов на поверхность водного объекта, включающий использование мобильного робототехнического комплекса по п. 1 и следующий технологический цикл операций:
- посредством манипулятора для загрузки жидкостного препарата по п. 2 устанавливают заборную емкость по п. 4 в исходное состояние с обеспечением перемещения с помощью упора поворотной ручки выпускного крана в состояние «закрыт»,
- перемещают упомянутую заборную емкость в заданное положение над люком накопительного бака модуля по п. 3,
- производят открытие защитной крышки люка накопительного бака и опускают упомянутую заборную емкость в бак на заданную глубину с обеспечением дополнительного перемешивания жидкостного препарата,
- выдерживают заборную емкость в накопительном баке на время, требуемое для заполнения емкости через входную трубку верхней крышки,
- производят вывод заборной емкости из люка, закрытие защитной крышки люка и перемещение заборной емкости к позиции над упомянутым загрузочным окном в днище транспортного судна комплекса по п. 1,
- выполняют спуск заборной емкости в загрузочное окно с открытием выпускного крана на емкости поворотом ручки выпускного крана в положение «открыт» посредством упора в стенку загрузочного окна и производят выдержку положения заборной емкости над загрузочным окном на время, требуемое для слива жидкостного препарата в окно,
- производят вывод заборной емкости из окна и перемещают ее в исходное положение, при этом выполняют перевод выпускного крана в исходное состояние «закрыт» посредством упомянутого упора,
- повторяют указанный технологический цикл операций.
6. Способ по п. 5, отличающийся тем, что открытие и закрытие защитной крышки люка накопительного бака осуществляют посредством манипулятора для линейного перемещения защитной крышки люка.
| Гидравлический сливной переходник | 1960 |
|
SU131712A1 |
| Способ питания импульсной газоразрядной лампы | 1959 |
|
SU130989A1 |
| СПОСОБ ДИСТАНЦИОННОЙ ОЧИСТКИ ПОВЕРХНОСТИ ОТ ЗАГРЯЗНЕНИЙ | 2004 |
|
RU2274916C2 |
| Устройство для аэрации водного объекта | 1990 |
|
SU1733402A1 |
| Способ обогащения воды биологически активными веществами | 1989 |
|
SU1730053A1 |
| CN 102165880 A, 31.08.2011 | |||
| CN 203608578 U, 28.05.2014. | |||

