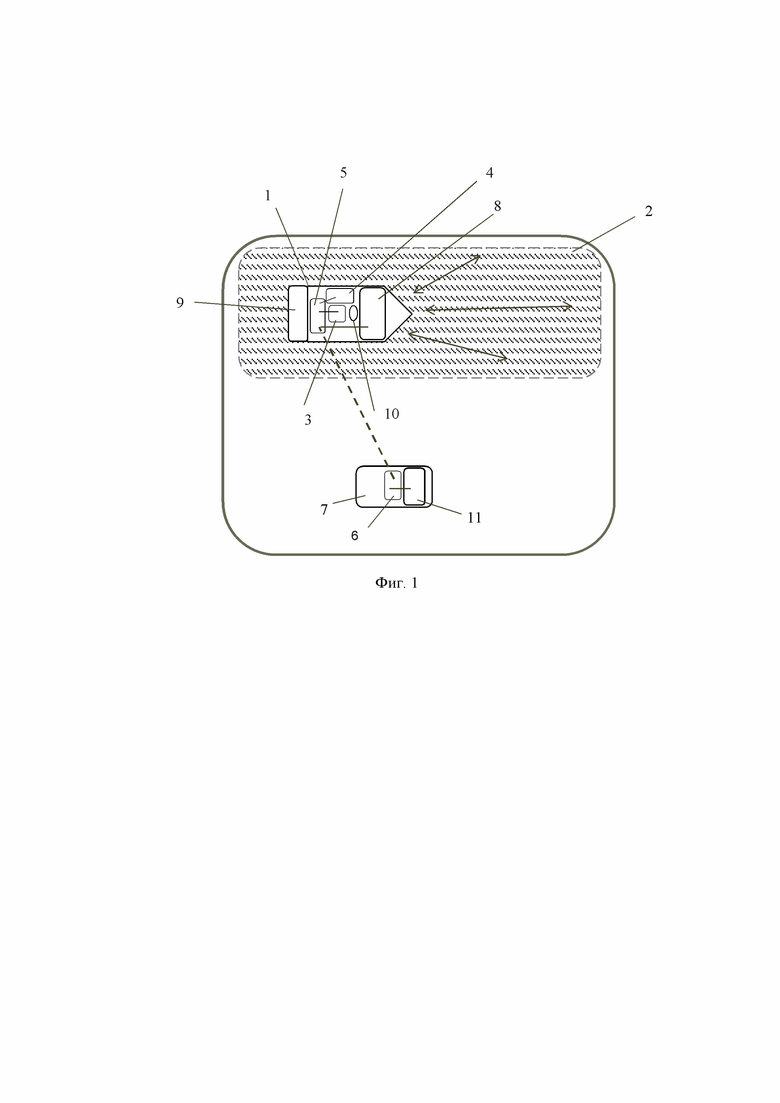
Для проведения экологического мониторинга территорий должен регулярно выполняться периодический отбор проб воды из водоемов и водотоков. Соответственно, актуальной является автоматизация процесса отбора проб из открытых водных объектов, для решения которой разработан мобильный робот - роботизированный комплекс технических средств, архитектура которого приведена на фиг. 1:
транспортное судно на воздушной подушке (СВП) 1 - носитель основного оборудования, перемещаемого по водоемам, водотокам 2 и береговым территориям;
установленный на транспортном судне манипулятор отбора проб воды в заборную емкость на заданной глубине и перелива проб в транспортный контейнер 3;
установленный на транспортном судне манипулятор загрузки проб в перемещаемые транспортные контейнеры 4;
информационно-управляющая система (ИУС) 5 в составе подсистем: транспортного судна, манипулятора отбора проб и манипулятора загрузки проб в контейнеры;
система дистанционного контроля и управления (СДКУ) 6, установленная на внедорожном транспортном средстве 7, размещаемом на береговых позициях обследуемого объекта.
Транспортное судно применяется как беспилотное, дистанционно управляемое (из кабины внедорожного транспортного средства, с применением пульта управления СДКУ) или мануально управляемое (из каюты, с применением пульта управления ИУС). Манипуляторы применяются как автоматические, дистанционно управляемые или мануально управляемые.
На фиг. 1 выделены: каюта транспортного судна 8; ходовой модуль СВП 9 - двигательная установка, воздушный винт, рули управления курсом и тангажом; окно 10 в днище СВП для доступа пробоотборной емкости к водной поверхности; кабина внедорожного автомобиля 11.
Дополнительно в состав комплекса вводится внедорожное транспортное средство - автомобиль с прицепом - трейлером для перевозки судна на воздушной подушке.
Информационная связь между ИУС и СДКУ обеспечивается по радиоканалам.
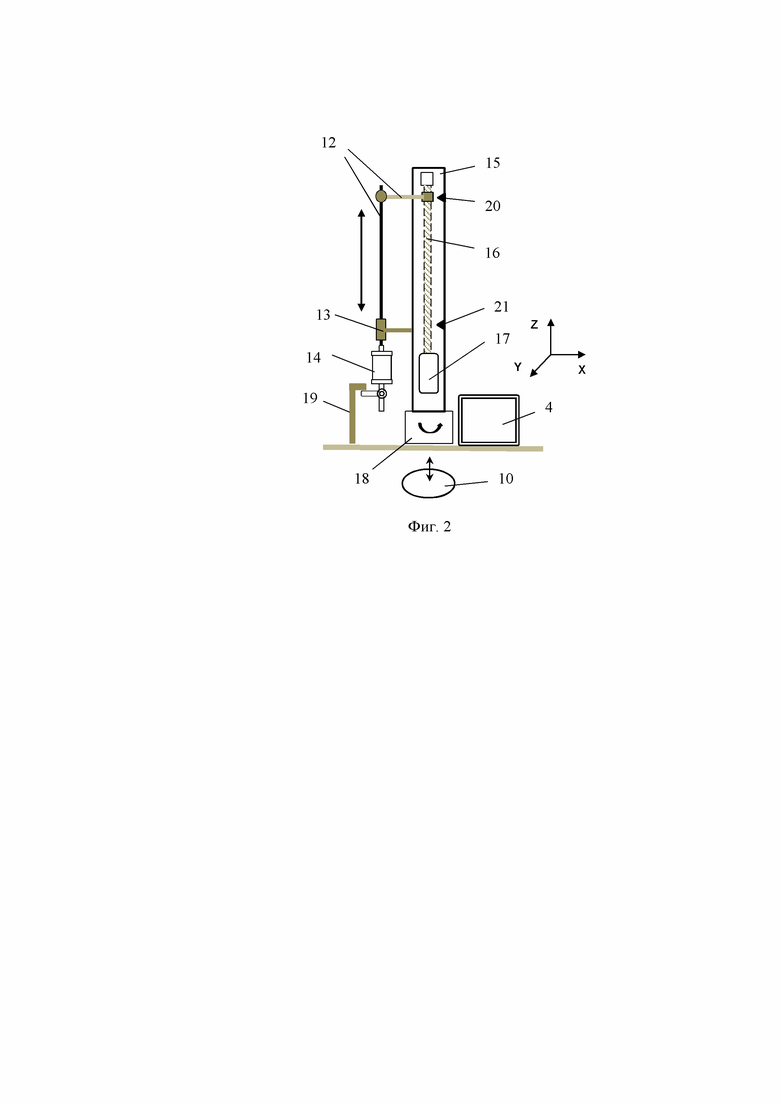
Манипулятор отбора проб 3 состоит из набора конструктивных модулей, представленных на фиг. 2 - вид сбоку:
каретка вертикального перемещения заборной емкости 12, с направляющей трубкой 13;
пробоотборная емкость 14 со встроенной в верхнюю крышку открытой трубкой забора воды, со встроенным в нижнюю крышку краном выгрузки проб, оснащенным поворотной ручкой, выходящей за стенку емкости;
колонна вертикального перемещения каретки с пробоотборной емкостью 15, со встроенным программно управляемым линейным электроприводом: ходовой винт с гайкой 16, соединенной с кареткой, шаговый электродвигатель 17;
основание колонны 18 со встроенным блоком вращения колонны вокруг вертикальной оси с программно управляемым шаговым электроприводом;
упор 19 для перемещения поворотной ручки крана выгрузки проб в исходное состояние;
контрольные концевые выключатели 20, 21 - датчики предельных положений каретки, верхнего и нижнего.
Работа манипулятора обеспечена наличием в днище транспортного судна окна доступа к поверхности водного объекта 10, показанного на фиг. 1 и фиг. 2.
Разгрузка пробоотборной емкости производится в транспортные контейнеры, установленные в манипуляторе загрузки проб 4, показанного на фиг. 1 и фиг. 2.
Функционирование шаговых электроприводов производится с применением блоков связи электродвигателей и датчиков положения с подсистемой ИУС, управляющей манипулятором.
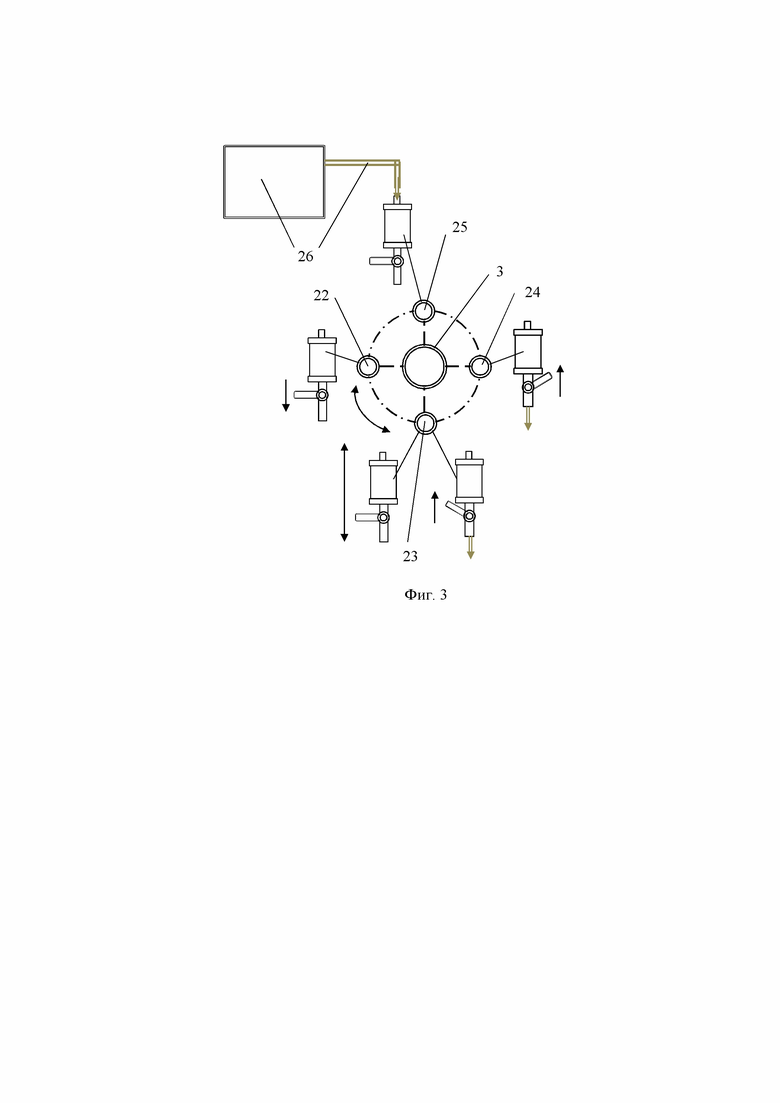
Колонна 15, фиг. 2, манипулятора отбора проб показана на фиг. 3 - вид сверху.
Пробоотборная емкость 14, фиг. 2, показана на фиг. 3 с различными состояниями ручки крана, характерными для рабочих положений манипулятора: 22, 23, 24, 25.
Манипулятор в начале выполнения технологического процесса устанавливает пробоотборную емкость 14 в исходное состояние 22, с применением линейного и кругового электроприводов, упора для перемещения поворотной ручки крана, затем циклически выполняет операции, обеспечивающие, отбор проб через окно в днище судна, выгрузку проб в транспортные контейнеры, промывку емкости, возврат емкости в исходное положение. Манипулятор отбора проб, при выполнении приведенных выше операций:
перемещает пробоотборную емкость с закрытым краном в положение 23 над окном для отбора проб в днище транспортного судна, с применением кругового электропривода;
опускает емкость на заданную для отбора пробы глубину, с заданной скоростью;
выдерживает емкость на заданной для отбора пробы глубине, в течение заданного для заполнения пробой времени;
извлекает емкость из окна для отбора проб, поднимает на высоту, требуемую для работы с манипулятором выгрузки проб в контейнеры;
перемещает емкость в положение 24 для выгрузки пробы в транспортный контейнер;
опускает пробоотборную емкость для ввода нижнего патрубка крана емкости в горловину транспортного контейнера и перемещения ручки крана в положение «открыт» упором в стенку транспортного кейса;
выдерживает емкость над транспортным контейнером в течение заданного для выгрузки пробы времени;
поднимает емкость для вывода нижнего патрубка крана емкости из транспортного контейнера;
перемещает емкость из положения 24 в положение 22, затем обеспечивает закрытие крана, с применением упора 19, перемещением емкости вверх;
перемещает емкость в положение 25, поднимает емкость для ввода в верхнюю трубку емкости штуцера соединения с блоком промывочной жидкости 26, на время заполнения емкости;
перемещает пробоотборную емкость в положение 23, затем обеспечивает открытие крана при опускании емкости с заданной скоростью в окно 10 - поворот ручки крана в положение «открыто» упором в край окна;
выдерживает емкость в положении, заданном для сброса в окно промывочной жидкости, в течение заданного времени, затем поднимает емкость вверх, извлекает из окна;
возвращает емкость в исходное состояние, 22, с применением линейного и кругового электроприводов, упора для перемещения поворотной ручки крана.
Блок промывочной жидкости 26 манипулятора отбора проб, установленный на транспортном судне, содержит: бак с жидкостью, программно управляемый от ИУС насос, соединительный трубопровод со штуцером ввода жидкости в пробоотборную емкость.
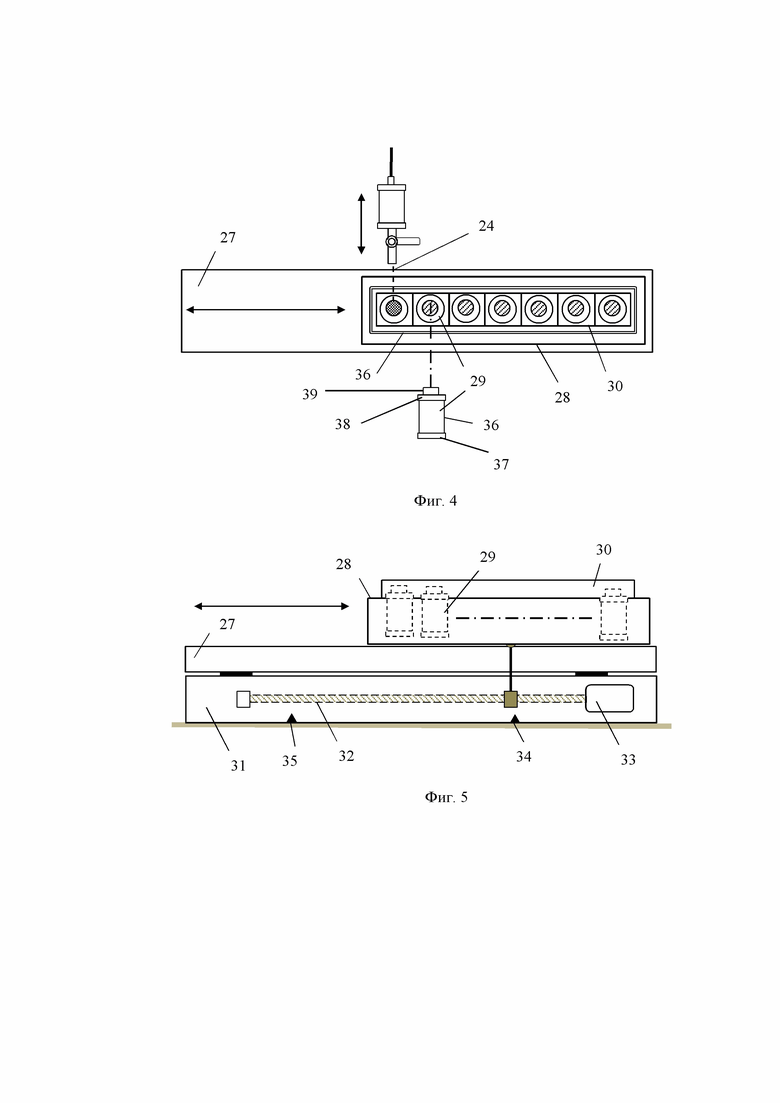
Манипулятор загрузки проб в перемещаемые транспортные контейнеры 4, фиг. 1, состоит из модулей, показанных на фиг. 4 - вид сверху и фиг. 5 - вид сбоку: несущее основание каретки манипулятора 27;
каретка 28 с транспортными контейнерами 29 (7 ед. на фиг. 4 и фиг. 5), установленными в транспортном кейсе 30; количество контейнеров и кейсов, устанавливаемых в каретку, определяется при рабочем проектировании манипулятора, при определении программы работ;
колонна горизонтального перемещения каретки 31, фиг. 5 (по оси Y, фиг. 2), со встроенным программно управляемым линейным электроприводом: ходовой винт с гайкой 32, соединенной с кареткой, и шаговый электродвигатель 33;
контрольные концевые выключатели 34, 35 - датчики предельных положений каретки;
рамка - фиксатор, применяемая для крепления транспортного кейса, 36, фиг. 4.
Транспортный контейнер 30 для загрузки и доставки проб воды состоит из компонентов: цилиндрический модуль заданного объема 36; съемная нижняя крышка контейнера 37; съемная верхняя крышка контейнера 38; горловина верхней крышки с пружинным клапаном 39.
Манипулятор отбора проб устанавливает пробоотборную емкость для выгрузки пробы в транспортный контейнер в положение 24, фиг. 3 и фиг. 4.
Манипулятор загрузки проб устанавливает очередной свободный транспортный контейнер в положение под пробоотборной емкостью. На фиг. 4 в положение загрузки установлен первый контейнер кейса. Загрузка контейнера выполняется манипулятором отбора проб по этапам:
ввод нижнего патрубка пробоотборной емкости в горловину контейнера, с одновременным открытием крана при повороте ручки с упором в стенку кейса; выдержка заданного времени для заполнения контейнера; вывод емкости вверх, из горловины контейнера.
Процесс циклически повторяется для каждого свободного контейнера. На циклах загрузки выполняется перемещение контейнеров манипулятором загрузки проб, до заполнения последнего; затем манипулятором производится возврат каретки в исходное положение.
Установка свободных и извлечение заполненных контейнеров в кейсах выполняется оператором робототехнического комплекса на маршрутах перемещения или на береговых территориях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный робототехнический комплекс и способ его применения для внесения жидкостных препаратов на водоемах и водотоках | 2019 |
|
RU2729230C1 |
| Средство транспортное роботизированное | 2023 |
|
RU2822947C1 |
| УСТРОЙСТВО ОТБОРА ПРОБ ЖИДКОСТИ | 1998 |
|
RU2139513C1 |
| СПОСОБ ПОРТОВОЙ ПЕРЕВАЛКИ КАМЕННОГО УГЛЯ | 2009 |
|
RU2401239C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| СПОСОБ ДОСТАВКИ ГРУЗОВ В МЕСТА ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714785C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| МОДУЛЬ И СИСТЕМА ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813210C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
Группа изобретений относится к области транспортного машиностроения. Мобильный робототехнический комплекс для отбора проб на водоемах и водотоках содержит транспортное судно на воздушной подушке, манипулятор отбора проб воды в пробоотборную емкость, манипулятор загрузки проб, внедорожное транспортное средство, информационно-управляющая. Манипулятор отбора проб состоит из каретки и колонны вертикального перемещения каретки с электроприводом, концевых выключателей и пробоотборной емкости. Транспортный контейнер комплекса состоит из цилиндрического модуля заданного объема, съемной нижней и верхней крышек контейнера. Способ функционирования робототехнического комплекса заключается в том, что перемещают емкость в положение для отбора проб на заданную для отбора пробы глубину. Извлекают емкость для отбора проб. Перемещают емкость в положение для выгрузки пробы в транспортный контейнер. Возвращают емкость в исходное состояние. Достигается обеспечение комплексной автоматизации отбора проб на водоемах. 6 н. и 1 з.п. ф-лы, 5 ил.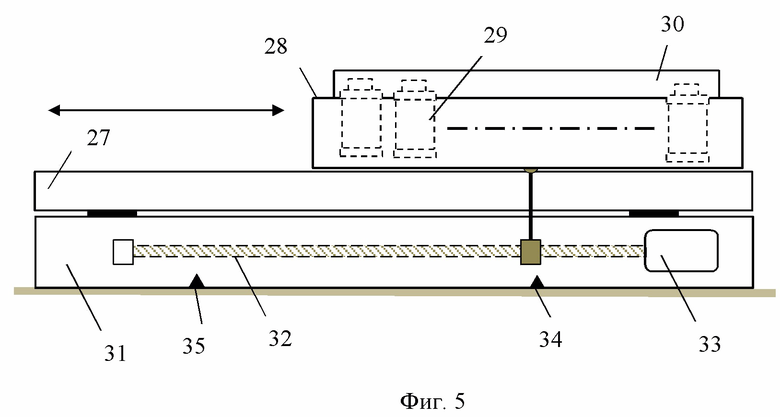
1. Мобильный робототехнический комплекс для отбора проб на водоемах и водотоках характеризуется тем, что в его состав входят:
транспортное судно на воздушной подушке - носитель основного оборудования и отобранных проб, перемещаемого по водоемам, водотокам и береговым территориям;
установленный на транспортном судне манипулятор отбора на заданной глубине проб воды в пробоотборную емкость и перелива проб в транспортные контейнеры;
установленный на транспортном судне манипулятор загрузки проб в перемещаемые для загрузки транспортные контейнеры;
внедорожное обеспечивающее транспортное средство, автомобиль с прицепом - носитель материалов, комплектующих и транспортных контейнеров, в том числе, подготовленных для загрузки проб и загруженных пробами для доставки в аналитическую лабораторию;
информационно-управляющая система (ИУС) в составе подсистем: транспортного судна, манипулятора отбора проб и манипулятора загрузки проб в контейнеры;
система дистанционного контроля и управления (СДКУ), установленная на внедорожном транспортном средстве, размещаемом на береговых позициях обследуемого объекта.
2. Мобильный робототехнический комплекс по п.1, характеризующийся тем, что транспортное судно и манипуляторы комплекса применяются как автоматические или дистанционно управляемые с внедорожного транспортного средства или мануально управляемые с транспортного судна; обмен информацией между ИУС и СДКУ обеспечивается по радиоканалам, основным режимом работы транспортного судна является программно управляемое перемещение по местоположениям для отбора проб и выхода на береговые позиции с географическими координатами, заданными программой обследования водоемов и водотоков, в которой предусматриваются позиции для обмена транспортными контейнерами (получение свободных, выдача заполненных), основным режимом работы манипуляторов, которым является программно управляемое перемещение пробоотборной емкости и перегрузка проб в транспортные контейнеры.
3. Манипулятор отбора проб мобильного робототехнического комплекса по п.1, состоящий из функциональных модулей: каретка вертикального перемещения; колонна вертикального перемещения каретки с программно управляемым линейным электроприводом; концевые выключатели - датчики положения каретки на вертикальной оси, блоки связи электроприводов и датчиков положения с подсистемой ИУС, управляющей манипулятором;
манипулятор отличается тем, что на каретке, с применением несущего стержня, установлена пробоотборная емкость;
верхняя крышка пробоотборной емкости выполнена с открытой трубкой забора воды, нижняя крышка - с краном и выходным патрубком для выгрузки проб; кран емкости оснащен поворотной ручкой, выходящей за стенку емкости;
в основание колонны вертикального перемещения каретки встроен блок вращения колонны вокруг вертикальной оси с программно управляемым электроприводом и упор для перемещения в исходное состояние «закрыт» поворотной ручки крана выгрузки проб.
4. Манипулятор загрузки проб мобильного робототехнического комплекса по п.1, состоящий из функциональных модулей: каретка горизонтального перемещения; колонна горизонтального перемещения каретки со встроенным программно управляемым линейным электроприводом; несущее основание каретки манипулятора; контрольные концевые выключатели - датчики предельных положений каретки, блоки связи электропривода и датчиков положения с подсистемой ИУС, управляющей манипулятором;
манипулятор отличается тем, что каретка выполнена с рамкой - фиксатором крепления транспортных кейсов с транспортными контейнерами, загружаемыми пробами;
каретка при функционировании комплекса оснащается транспортными кейсами с установленными в них транспортными контейнерами;
количество контейнеров и кейсов (один или несколько), устанавливаемых в каретку, определяется при проектировании манипулятора, а также при подготовке программы работ с применением робототехнического комплекса.
5. Транспортный контейнер комплекса по п.1, состоящий из конструктивных элементов:
цилиндрический модуль заданного объема; съемная нижняя крышка контейнера; съемная верхняя крышка контейнера; отличается тем, что
в верхнюю крышку встроена горловина с пружинным клапаном для ввода выходного подкранового патрубка пробоотборной емкости при выгрузке проб в контейнер.
6. Способ функционирования робототехнического комплекса, в части применения манипулятора отбора проб, характеризующийся тем, что
манипулятор в начале технологического процесса устанавливает пробоотборную емкость в исходное состояние с применением линейного и кругового электроприводов, упора для перемещения поворотной ручки крана в состояние «закрыт», затем циклически выполняет операции:
перемещает емкость в положение над окном для отбора проб в днище транспортного судна, с применением кругового электропривода;
перемещает емкость на заданную для отбора пробы глубину с заданной скоростью;
выдерживает емкость на заданной для отбора пробы глубине в течение заданного для заполнения времени;
извлекает емкость из окна для отбора проб, поднимает на высоту, требуемую для работы с манипулятором загрузки проб в контейнеры;
перемещает емкость в положение для выгрузки пробы в транспортный контейнер;
опускает емкость для ввода подкранового патрубка емкости в горловину транспортного контейнера и перемещения ручки крана в положение «открыт» упором в стенку транспортного кейса;
выдерживает емкость над транспортным контейнером в течение заданного для выгрузки пробы времени;
возвращает емкость в исходное состояние с применением линейного и кругового электроприводов, упора для перемещения поворотной ручки крана в положение «закрыт»;
перемещает емкость в положение для заполнения промывочной жидкостью, поднимает емкость для ввода в верхнюю трубку емкости штуцера соединения с блоком промывочной жидкости, на время заполнения емкости;
перемещает емкость в положение над окном в днище транспортного судна, обеспечивает открытие крана при опускании емкости в окно - поворот ручки крана в положение «открыт» упором в край окна;
выдерживает емкость в положении, заданном для сброса в окно промывочной жидкости, в течение заданного времени, затем поднимает емкость вверх, извлекает из окна;
возвращает пробоотборную емкость в исходное состояние с применением линейного и кругового электроприводов, упора для перемещения поворотной ручки крана в положение «закрыт».
7. Способ функционирования робототехнического комплекса, в части применения манипулятора загрузки проб в транспортные контейнеры, характеризующийся тем, что
манипулятор циклически производит, с применением линейного электропривода, перемещения каретки с кейсом, находящимися в нем транспортными контейнерами, на позицию, определенную для загрузки из пробоотборной емкости очередного свободного контейнера;
после загрузки пробами всех контейнеров, находящихся в кейсе, возвращает, с применением линейного электропривода, каретку в исходное положение.
| СПОСОБ ИССЛЕДОВАНИЯ ПРОБ ВОДНОЙ СРЕДЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2051355C1 |
| Пробоотборник | 1984 |
|
SU1171689A1 |
| Способ отбора проб грунта дна водного бассейна | 1989 |
|
SU1649356A1 |
| KR 101469611 B1, 05.12.2014 | |||
| US 9869613 B2, 16.01.2018 | |||
| KR 101375354 B1, 19.03.2014. | |||

