Изобретение относится к области космической техники и может быть использовано для управления движения центрами масс геостационарных космических аппаратов (КА), в процессе коллокации делящими между собой единую номинальную область удержания по долготе (ОУД).
Отдельные участки геостационарной орбиты (ГСО) весьма перегружены КА. Технической проблемой при эксплуатации КА на ГСО является нахождение этих КА в узком диапазоне долгот в состоянии коллокации с одним, двумя, тремя и более КА. Как там, в этой долготной области сосуществуют КА, и подчас КА, принадлежащие различным государствам – вопрос пока риторический. Настоятельно требуется некий регламент ответственного поведения на ГСО.
Как правило, коллокацию КА проводят по согласованным схемам. Все схемы – аналоги, организующие эволюции векторов наклонения и эксцентриситета орбит КА, сводятся к равноудалению точек прицеливания векторов еn [еn; (Ω+ω)n] (n = 1,2,…) и in [in; Ωn] (n = 1,2,…) в соответствующих фазовых плоскостях КА и поддержанию концов векторов еn и in внутри соответствующих областей выбранных радиусов, центрами которых являются соответствующие точки прицеливания. Идеальным вариантом считается для двух КА разнесение долгот восходящих узлов (Ωn) и прямых восхождений перигеев (Ω+ω)n точек прицеливания на 180°, причем аргументы широты перигеев КА должны быть близки нулю или 180°. Для трех КА цифру 180 для точек прицеливания заменяют на 120. Такой принцип коллокации общеизвестен, он следует из уровня техники. Однако за кажущейся простотой схем скрывается сложная и затратная процедура управления векторами коллокации. Больше трех КА в единой области ±0,05° относительно центра ОУД быть не может.
Из уровня техники известен способ коллокации разнесением двух КА по гринвичской долготе. С помощью двигателей малой тяги проводят одновременные коррекции удержания КА по гринвичской долготе, эксцентриситету и широте (наклонению), как правило, по принципу «один двигатель – одни сутки» и, при необходимости, – отдельные коррекции по эксцентриситету. Достоинством способа является (при существовании буферной зоны порядка суммарной погрешности знания текущего положения обоих КА по долготе по наихудшему варианту) полная независимость КА друг от друга. На интервале между траекторными измерениями 7 суток погрешность определения и прогнозирования положения вдоль орбиты δL составляет 4,5 км или 22" ([1] ОАО «ЭКА». Научно-технический отчет. Отработка технологии и оценка характеристик навигационно-баллистического обеспечения полетом КА 17Ф15М на этапе летных испытаний, М.,2010 г., стр.82). Но это при отсутствии типовых работ по уточнению тяги двигателей коррекции, когда тяги двигателей считают номинальными либо формулярными (определенными на заводе-изготовителе). Будем считать, что ширина буферной зоны составляет 10 км, то есть ±5 км от общей линии разграничения ОУД. Способ предполагает, что оба КА добровольно делят между собой номинальную ОУД примерно на равные части. Недостатками данного аналога являются слишком узкая в итоге ОУД для каждого из КА и, как следствие, повышенный расход топлива на коррекции уклонения и повышенные риски критического сближения аппаратов, либо невозможность разнесения по долготе. В данной области по долготе на момент начала коллокации могут находиться уже не один, и не два КА. Однако, если для каждого из двух КА собственная ОУД составит ±0,05°, функционирование каждого их них на своих рабочих позициях будет успешным.
Известен способ удержания геостационарного КА на заданной орбитальной позиции (RU №2481249), который взят за прототип. Суть способа сводится к двум главным признакам (первый - из ограничительной части формулы; второй - из отличительной части):
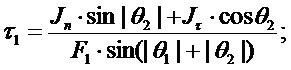
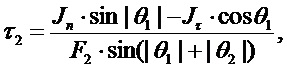
а) расчет длительности работы двигателей по формулам:
где τ1, τ2 – длительности работы двигателей, с;
Jn, Jτ – импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1, F2 – тяги двигателей, Н;
θ1, θ2 – углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге;
и проведение коррекции парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы;
б) определяют номинальную зависимость сидерического периода обращения после коррекции удержания от текущего положения КА по долготе относительно центра ОУД (орбитальной позиции), тем самым выбирают линию удержания центра масс КА в заданной ОУД в координатах на фазовой плоскости [T- сидерический период; λ- гринвичская восточная долгота], стремление к которой, несмотря на ошибки управления, создает устойчивый центростремительный эффект эволюции - вызывает гарантированное стремление КА к центру ОУД.
Линия удержания может иметь довольно сложный вид, однако суть сводится к прямой, проходящей на плоскости [T; λ ] через центр ОУД при равенстве сидерического периода звездным суткам снизу вверх и слева направо под выбранным опытным путем углом наклона к одной из осей координат. Для каждой рабочей позиции желательно иметь свой угол наклона линии удержания - это очень важно при организации «стояния» средней долготы подспутниковой точки в центре ОУД с минимальным люфтом.
Это еще не способ коллокации, но в прототипе есть перечисленные выше существенные признаки, без которых предлагаемое изобретение не состоятельно.
Технической проблемой изобретения является коллокация при нахождении более двух геостационарных КА в единой рабочей области, когда для коллокации требуются только соглашение заинтересованных сторон в делении номинальной ОУД на более узкие области удержания. При этом способ такой коллокации должен быть гарантированно надежным.
Поставленная задача решается так, что в способе коллокации на ГСО, включающем слежение за орбитами каждого КА, определение номинальной зависимости сидерического периода обращения после коррекции удержания от текущего положения КА по долготе относительно центра ОУД, расчет длительности работы двигателей КА по формулам (1), (2) и проведение коррекции парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы, введены новые операции, заключающиеся в том, что номинальную ОУД делят на равные части пропорционально всем участникам коллокации: не более четырех – для ОУД 0,2°; не более двух – для ОУД 0,1°, в каждой из новых областей устанавливают свой центр ОУД, ориентируют и поддерживают коррекциями в одинаковом направлении векторы эксцентриситетов (перигеев) орбит КА, при достижении текущих эксцентриситетов орбит КА экстремального значения:
где Δλ – половина ширины новой ОУД;
l – половина ширины буферной зоны, км;
r0 – радиус номинальной ГСО, 42164 км,
рассчитывают и проводят обнуляющие коррекции эксцентриситета, после чего проводят одновременные коррекции периода обращения (долготы) и вектора наклонения орбиты, в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы, вектора наклонения и вектора эксцентриситета орбиты, после чего на период уклонения линия долготной эволюции КА на интервале траекторных измерений становится вложенной синфазно в линию долготной эволюции соседнего КА.
Техническим результатом настоящего изобретения является создание способа коллокации на основе выделения каждому КА своей ОУД, как наиболее простого в эксплуатации в отношении баллистического обеспечения полета КА при плотности заполнения КА номинальной ОУД не меньшей, чем в способах-аналогах.
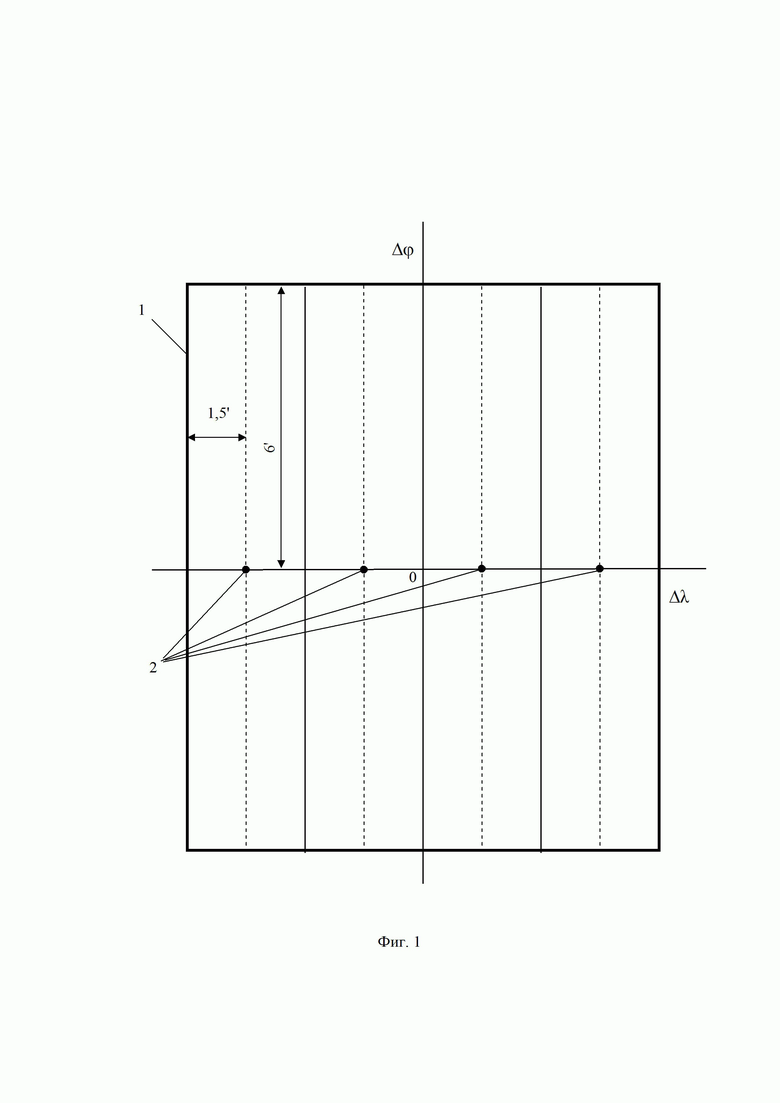
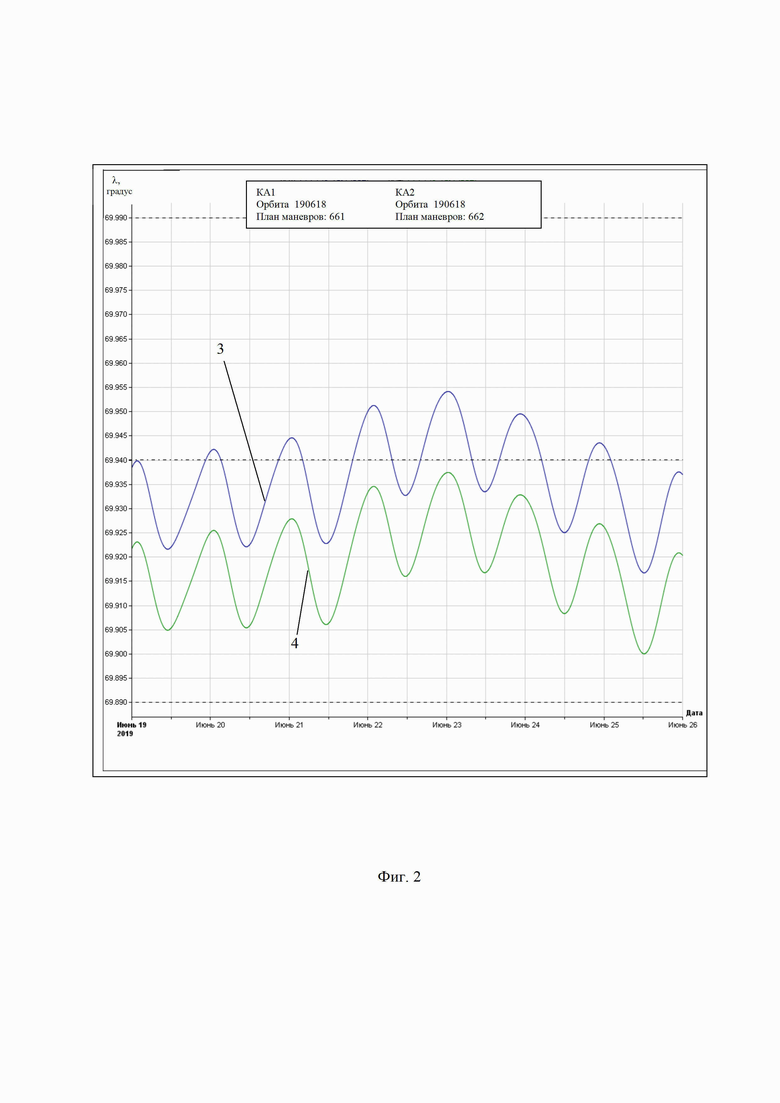
Сущность изобретения поясняется фиг. 1, где представлена принципиальная схема деления номинальной ОУД шириной 0,2° по широте и долготе, и фиг. 2, где изображены эволюции долготы КА – изменения положения КА по долготе в отсутствие коррекций полета двух КА после коррекции уклонения от опасного сближения одного из них с третьим фигурантом. Введены следующие обозначения:
1 – номинальная ОУД;
2 – рабочие позиции – точки стояния;
3 – эволюция долготы КА1;
4 – эволюция долготы КА2.
Технический результат изобретения обеспечивается выполнением следующей последовательности операций:
1. По данным траекторных измерений определяют количество КА и стратегии удержания КА в интересующей ОУД 1.
2. Если наличие предполагаемого КА в данной ОУД показано, ведутся переговоры с центрами управления соответствующих КА. Предлагается всем единообразная стратегия удержания космических аппаратов, состоящая в том, что средняя долгота КА (средняя между долготой перигея и апогея текущей орбиты) за счет одновременных коррекций удержания вектора наклонения орбиты и периода обращения (долготы) КА парой двигателей, установленных по разные стороны от нормали к орбите при определенной номинальной зависимости сидерического периода обращения после коррекции удержания от текущего положения КА по долготе относительно центра ОУД, сколь угодно долго будет находиться в центре выделенной ОУД – на рабочей позиции 2. Будет расти эксцентриситет. Однако темп его роста невелик. К примеру, для ОУД 0,1° эксцентриситет с нуля вырастает до 0,00024 (что соответствует колебаниям по долготе подспутниковой точки ±1,65 минуты) за две с половиной – три недели. Такой эксцентриситет за одну коррекцию, состоящую из двух включений двигателей в районах апогея и перигея, можно полностью устранить, и такие коррекции эксцентриситета следует регулярно проводить.
Переговоры могут не дать желаемого результата. Но это недостаток всех схем коллективной коллокации, описанных выше.
3. Отрабатывается тактика и предложенная стратегия удержания по долготе и широте (наклонению) в течение срока активного существования на выбранной орбитальной позиции.
4. При достижении эксцентриситета значения eext проводят обнуляющую коррекцию эксцентриситета в районах точек апсид. Энергозатраты на устранение эксцентриситета за год составляют (6 – 7) м/с. Такая коллокация «стоит дороже» в два раза (примерное приращение характеристической скорости в аналогах с разнесением точек прицеливания 3 м/с предусмотрено сейчас в топливном бюджете геостационарных КА). Но оно того стоит: по отношению к прототипу плотность КА в номинальных ОУД ГСО может быть увеличена в два раза, и это решающий аргумент. И в сравнении с другими аналогами изобретение отличается простотой задачи и способом ее разрешения.
5. При наличии нештатных ситуаций (появление нового КА или уход из номинальной ОУД прежнего КА и согласно этому перераспределение индивидуальных ОУД, появление КА с неясной пока стратегией удержания на внешних границах ОУД) проводят коррекции уклонения.
Поскольку при каждой коррекции эксцентриситета эксцентриситет устремляется в ноль, угол «Солнце-перигей-Земля» сразу и в течение 2 – 3 недель будет порядка 90°, затем снова коррекции. Таким образом, векторы эксцентриситетов (перигеев) всех КА, участвующих в коллокации, будут ортогональны направлению на Солнце, коррекции эксцентриситета будут всегда проводиться в одно и то же среднесолнечное время, будет периодически расти только модуль эксцентриситета. Дополнительных энергозатрат на единообразную ориентацию векторов эксцентриситета не требуется. Однако ориентирование и поддержание коррекциями в одинаковом направлении векторов эксцентриситетов (перигеев) орбит КА является существенным признаком изобретения, поскольку, если не регулярно, то эпизодически, на начальном этапе коллокации для каждого из КА, начинающего участвовать в это процессе, либо при проведении коррекции уклонения, когда требуется повышенная точность ее исполнения в части совпадения направлений векторов перигеев орбит КА, направления векторов эксцентриситетов (перигеев) как минимум поправляются. Вложенность линий долготных эволюций должна быть как можно точнее, тем более, если эта вложенность приводит к минимальным допустимым межспутниковым расстояниям.
Формирование согласно стратегии коллокации одинаковых прямых восхождений перигеев орбит КА позволяет безопасно проводить коррекции долготы: тогда линия долготной эволюции 3 одного КА синфазна линии долготной эволюции 4 другого КА. Вложенность линий 3 и 4 позволяет внутривитковыми колебаниями по долготе входить в смежную ОУД при допустимых межспутниковых расстояниях.
Совершенной гарантией безопасности будет разнесение точек прицеливания по наклонению орбит соседних КА на 180°.
Следует сказать, что выходы КА за номинальные границы ОУД не являются нарушением соглашений по ГСО, как не является нарушением сосуществование нескольких КА в единой узкой области по долготе. Если не создаются помехи нормальной работе другим КА – можно стоять в этой и какой-либо еще области со своей шириной удержания. Это практика.
Предлагаемое изобретение не уступает способам-аналогам в гарантиях обеспечения безопасного сосуществования КА на ГСО и обеспечивает нахождение максимально возможного количества КА в данной номинальной ОУД разнесением КА по долготе.
Изобретение относится к области космической техники и может быть использовано для удержания космических аппаратов (КА) в заданном диапазоне долгот и широт рабочей позиции на орбите без помех другим КА. В способе коллокации на геостационарной орбите общая номинальная область удержания по долготе (ОУД) делится поровну между участниками коллокации; средняя за виток долгота подспутниковой точки находится в центре ОУД с минимальным люфтом, благодаря выбору оптимальной зависимости сидерического периода обращения после коррекции удержания от текущего положения КА по долготе относительно центра ОУД и последовательным включениям двигателей коррекции на расчетные длительности. По достижении эксцентриситета орбиты каждого КА оговоренного предельного значения, достаточного, чтобы образовать гарантированные буферные зоны на границах между ОУД, проводят обнуляющие коррекции эксцентриситета. Техническим результатом изобретения является обеспечение коллокации при нахождении более двух геостационарных КА в единой рабочей области. 2 ил.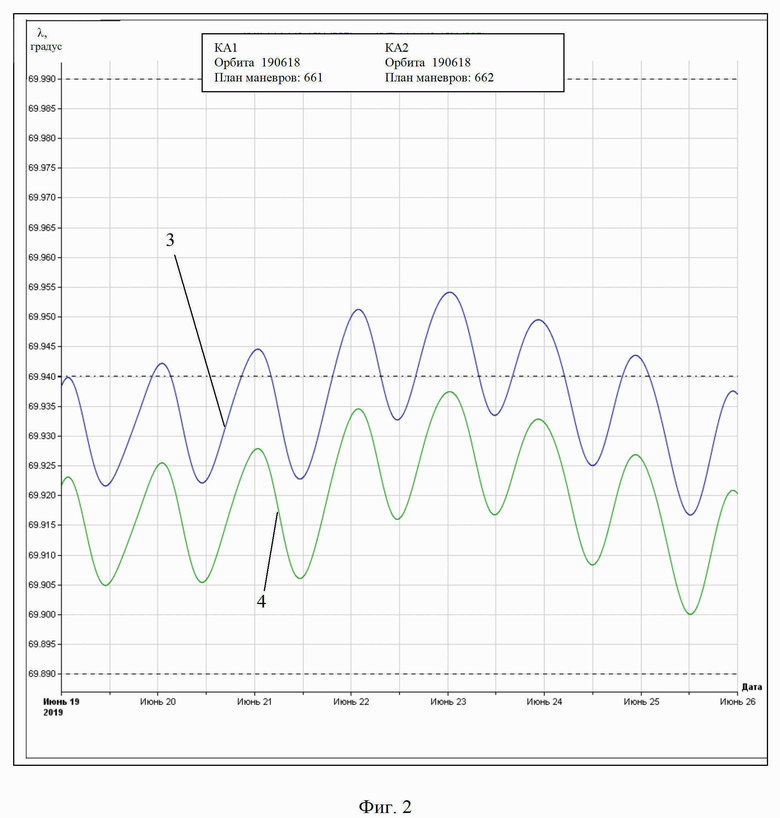
Способ коллокации на геостационарной орбите (ГСО), включающий слежение за орбитами каждого космического аппарата (КА), определение номинальной зависимости сидерического периода обращения после коррекции удержания от текущего положения КА по долготе относительно центра области удержания, расчет длительности работы двигателей КА по формулам:
где  ,
,  – длительности работы двигателей, с;
– длительности работы двигателей, с;
 ,
,  – импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
– импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1, F2 – тяги двигателей, Н;
 ,
,  – углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге,
– углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге,
и проведение коррекции парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы, отличающийся тем, что номинальную область удержания по долготе (ОУД) делят на равные части пропорционально всем участникам коллокации: не более четырех – для ОУД 0,2°; не более двух – для ОУД 0,1°; в каждой из новых областей устанавливают свой центр ОУД; ориентируют и поддерживают коррекциями в одинаковом направлении векторы эксцентриситетов (перигеев) орбит КА, при достижении текущих эксцентриситетов орбит КА экстремального значения:
где  – половина ширины новой ОУД;
– половина ширины новой ОУД;
l – половина ширины буферной зоны, км;
r0 – радиус номинальной ГСО, 42164 км;
рассчитывают и проводят обнуляющие коррекции эксцентриситета, после чего проводят одновременные коррекции периода обращения (долготы) и вектора наклонения орбиты; в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы, вектора наклонения и вектора эксцентриситета орбиты.
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2559371C2 |
| EP 780297 B1, 14.11.2001. | |||

