Изобретение относится к области космической техники и может быть использовано для удержания космического аппарата в заданном диапазоне географических долгот и широт рабочей позиции на геостационарной орбите.
Известен способ автоматических коррекций удержания геостационарного КА [1], изложенный в рабочей документации предприятия. Суть способа автоматических коррекций сводится к следующему:
1. Зная величину ежесуточного изменения сидерического периода обращения за счет геопотенциала и считая влияние Луны и Солнца принципиально несущественными для реализации среднего движения в фазовой плоскости [Т; λ], выставляют КА на позицию [λст;(1/2)ΔТе/с], где λст - долгота «стояния» (или центр орбитальной позиции), ΔТе/с - ежесуточное изменение сидерического (от одного до другого пересечения плоскости XOZ в инерциальной геоцентрической системе координат) периода обращения.
2. Проводят ежесуточные коррекции соответствующими знаку и величине изменения ΔТе/с двигателями (двигателем) в течение всего цикла автоматического удержания, длительность которого соответствует интервалу времени между проведениями траекторных измерений.
Идея состоит в том, что при аккуратной выставке КА на исходную позицию возмущения от Земли, Луны, Солнца, солнечного давления не влияют на среднее на больших интервалах времени движение КА, и удержание осуществляется по т.н. предельному циклу, когда КА в фазовой плоскости после коррекции периода на величину ΔТе/с пассивно возвращается на исходную позицию.
Способ не прошел испытаний практикой: ошибка выставки КА на исходную позицию (ошибка определения положения КА ΔТопр по данным траекторных измерений, на сегодня 0,5 с по периоду) и, особенно, ошибка реализации тяги двигателей (~11%) приводили к скорому выходу не только из гарантированной области удержания по долготе Δλгарант=Δλном-2е-Δλопр-Δλвит-Δλi,
где Δλном - заданная область удержания, ±(0,1→0,05)°;
е - эксцентриситет орбиты, 0,0005→0,00029;
Δλопр - максимальная погрешность определения и прогнозирования текущей долготы, более 1угл. мин;
Δλвит - максимальная суммарная амплитуда внутривитковых колебаний по долготе за счет возмущения долготы и эксцентриситета, менее 1 угл. мин;
 - амплитуда колебаний по долготе за счет наклонения, при i≤0,1° - менее 9 угл. с,
- амплитуда колебаний по долготе за счет наклонения, при i≤0,1° - менее 9 угл. с,
но и из заданной (номинальной) области, при этом траекторные измерения проводились не чаще, чем раз в месяц. Дело в том, что для большинства долгот «стояния» ежесуточное изменение сидерического периода обращения ΔТе/с составляет (0,25-0,48) с, значит, каждые сутки следует изменять период на величину (0.25-0,48) с, и каждые сутки погрешность (ΔТF) за счет реализации коррекции (тяги) составит (0,028-0,053) с, за 10 сут накопится погрешность (0,28-0,53) с, за месяц - (0,85-1,55) с. При известной зависимости скорости (Vλ) дрейфа по долготе от отклонения (ΔТc) сидерического периода от звездных суток (86164,1 с)
Vλ≈ΔТс/4, угл. мин/сут,
где ΔТc=(1/2)ΔТе/с+ΔТопр+ΔТF, имеем уход за 10 суток в (1,9-2,2) угл. мин от долготы «стояния»; за 30 суток - (7,9-10,5) угл. мин. Это значит, что даже при эксцентриситете 0,00029 удержание даже в области ±0,1° в течение 10 суток маловероятно. Таким образом, для многих КА, функционирующих на геостационарной орбите в области Δλном=±0,05°, способ автоматических коррекций вообще неприемлем.
Известен «Способ одновременной коррекции удержания вектора наклонения орбиты и периода обращения трехосностабилизированного космического аппарата» (RU 2381965, МПК B64G 1/24) [2], который и взят за прототип. Согласно этому способу, включающему проведение коррекций, определяют требуемый угол отклонения вектора тяги двигателя от нормали к орбите в плоскости рысканья, исходя из обеспечения заданной точности исполнения коррекции периода обращения космического аппарата и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости космического аппарата, задают отклонения направлений векторов тяги двигателей, рассчитывают длительности работы двигателей по формулам:
где τ1, τ2 - длительности работы двигателей, с;
Jn, Jτ - импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1, F2 - тяги двигателей, Н;
θ1, θ2 - углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге,
и проводят коррекцию парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы. При этом выполняется следующая последовательность операций (все угловые величины выражены в радианах):
1. Определяют требуемый угол (θ) отклонения вектора тяги двигателя от нормали к орбите, исходя из обеспечения заданной точности исполнения коррекции периода обращения КА и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости КА.
Величину угла θ рассчитывают по формуле
где θ - острый угол отклонения двигателей по разные стороны от нормали к орбите в плоскости рысканья;
ввиду того, что 
следует
δθ - погрешность, с которой поддерживается положение КА в плоскости рысканья относительно центра масс;
δVτ - задаваемая максимальная относительная погрешность реализации корректирующего импульса на изменение периода обращения КА;
ΔVτ - требуемое максимальное изменение за коррекцию трансверсальной составляющей вектора скорости КА в течение срока его активного существования, м/с;
ΔVn - требуемое изменение за коррекцию ортогональной составляющей вектора скорости КА, соответствующее расчетному максимальному изменению вектора наклонения  (составляющие вектора наклонения ix=sin(i)·cos(Ω); iy=sin(i)·sin(Ω), Ω - долгота восходящего узла орбиты), м/с.
(составляющие вектора наклонения ix=sin(i)·cos(Ω); iy=sin(i)·sin(Ω), Ω - долгота восходящего узла орбиты), м/с.
Следует отметить, что способ не требует угловых разворотов КА. Двигатели устанавливаются конструктивно под заранее рассчитанными углами θ1 и θ2.
2. Задают отклонения направлений векторов тяги двигателей.
Устанавливают по два двигателя относительно обеих полуосей нормали к орбите. Направления векторов тяги двигателей сейчас задают отклонениями от нормали к орбите в плоскости рысканья на углы «+θ» и «-θ». В общем случае модули этих углов могут быть не равны.
3. Юстируют направление векторов тяги двигателей.
При установке двигателей на КА под углами «+θ» и «-θ» за направление вектора тяги двигателя принимается геометрическая ось двигателя. Однако, за счет погрешности установки двигателя и отклонения фактического направления вектора тяги двигателя от его геометрической оси, фактические углы направления векторов тяги отличаются от расчетных. Поэтому производится юстировка, при которой определяют фактические углы отклонения векторов тяги двигателей от нормали. Для проведения юстировки включают поочередно двигатели, и после каждого включения проводят траекторные измерения. По изменению параметров орбиты и определяют фактические углы θ1 и θ2 соответственно для первого и второго двигателей каждой из полуосей нормали к орбите. Например, для геостационарной орбиты углы θ1 и θ2 можно определить по формуле
где µ - гравитационный параметр Земли, км3/с2;
ΔT - изменение периода обращения КА за счет работы двигателя (определяется по результатам траекторных измерений), с;
R - радиус номинальной геостационарной орбиты КА, км;
а - ускорение, создаваемое двигателем, км/с2;
τ - длительность работы двигателя, с.
4. Рассчитывают длительности работы двигателей.
Сумма проекций импульсов тяг первого и второго двигателей на нормаль к орбите должна быть равна требуемому импульсу на проведение коррекции вектора наклонения орбиты, т.е.

С другой стороны, разность проекций импульсов тяг первого и второго двигателей на трансверсаль должна быть равна требуемому импульсу на проведение коррекции периода обращения КА, т.е.

Решая совместно уравнения (1) и (2) относительно τ1 и τ2, получаем
5. Проводят коррекцию парой двигателей.
Коррекции проводят последовательным включением первого двигателя на τ1 секунд и второго двигателя на τ2 секунд.
Импульсы Jn, Jτ определяются стратегией реального удержания КА по известным формулам, например, П.Е. Эльясберг «Введение в теорию полета ИСЗ», М., Наука, 1965 г.
где Jτ - требуемый импульс на проведение коррекции периода обращения КА, кг·км/с;
m - масса КА, кг;
µ - гравитационный параметр Земли, км3/с2;
ΔT - требуемое изменение периода обращения за коррекцию, с;
R - радиус номинальной геостационарной орбиты, км,
а также, Г.М.Чернявский, В.А.Бартенев, В.А.Малышев «Управление орбитой стационарного спутника», M., Машиностроение, 1984 г., стр.129, 138. Моменты включений двигателей определяются из условия, чтобы середина интервала работы двигателей соответствовала точке оптимального приложения импульсов. При непрерывной коррекции двумя двигателями на геостационарной орбите можно воспользоваться следующими рабочими формулами (все угловые величины выражены в радианах):

 ,
,
где tвкл - время начала коррекции, секунды от опорной эпохи;
t0 - некоторое начальное время, секунды от опорной эпохи;
αвкл=arctg[Δiy·sign(αz)/Δix·sign(az)] (3/) - прямое восхождение середины активного участка;
Δiу, Δix - требуемые составляющие изменения вектора наклонения  в координатах:
в координатах:
ix=sin(i)·cos(Ω);
iy=sin(i)·sin(Ω);
Ω - долгота восходящего узла орбиты КА;
az - ортогональное ускорение, км/с2;
 - отклонение от точки «стояния» в момент t0;
- отклонение от точки «стояния» в момент t0;
S0 - среднее гринвичское звездное время в момент t0;
λcm - долгота «стояния» КА - центр орбитальной позиции;
n - среднее движение КА, с-1;
Vcp - средняя орбитальная скорость, км/с.
Приведенный «Способ одновременной коррекции удержания вектора наклонения орбиты и периода обращения трехосностабилизированного космического аппарата» на сегодня имеет недостатки:
1. Коррекции проводят, как правило, последовательными включениями двигателей выбранной пары относительно полуосей нормали к орбите. Но задача удержания по долготе только такими включениями, как показала практика, не решается. При ежесуточных коррекциях наклонения орбиты довольно часто из-за грубых ошибок управления центром масс КА, к которым относятся:
- ошибка реализации и знания тяги;
- ошибка определения основного контролируемого параметра движения - периода обращения,
назревает необходимость проведения коррекции периода обращения «долготными» двигателями, расположенными относительно полуосей трансверсали, которые, по идее, должны бы использоваться лишь для коррекций эксцентриситета орбиты.
2. В отсутствие автономной навигации или ежесуточных траекторных измерений с помощью наземного комплекса управления невозможно качественно удерживать КА на орбите в узкой области по долготе. На интервале периодичности траекторных измерений более 15 суток к погрешностям определения параметров движения центра масс КА добавляются в разы большие погрешности прогнозирования этих параметров с учетом ошибок реализации тяги к концу указанного интервала. Без автономной навигации способ-прототип в стратегии удержания все тот же способ автоматических коррекций - погрешности удержания все те же. А нет улучшения качества удержания - любой способ мало чего стоит. В настоящее время испытывается высокоточная автономная радионавигация. Однако и ей необходимы независимые определения ускоряющих воздействий от работы двигателей коррекции.
Вообще, качество управления резко повысится, если удастся общую ошибку управления центром масс КА явно разложить на составляющие и организовать их компенсацию. В отношении реализации и знания тяги двигателей прототип не дает удовлетворительные результаты.
Целью изобретения является повышение точности удержания, гарантированная возможность сужения пределов удержания КА на орбитальной позиции для нужд совместного пребывания двух и более КА в узких областях, предписываемых международным регламентом, и уменьшение энергозатрат на удержание.
Поставленная цель достигается тем, что в способе удержания геостационарного КА на заданной орбитальной позиции, включающем определение требуемого угла отклонения вектора тяги двигателя от нормали к орбите в плоскости рысканья, исходя из обеспечения заданной точности исполнения коррекции периода обращения космического аппарата и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости космического аппарата, задание отклонения направлений векторов тяги двигателей, расчет длительности работы двигателей по формулам:
где τ1, τ2 - длительности работы двигателей, с;
Jn, Jτ - импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1, F2 - тяги двигателей, Н;
θ1, θ2 - углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге, и проведение коррекции парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы, введены новые операции, заключающиеся в том, что: прикладывают проверочное воздействие к корпусу КА путем включения двигателя коррекции; измеряют значения анодного тока и напряжения на электродах плазменного двигателя в процессе проверочного и корректирующего воздействий; осредняют полученные значения на всем интервале измерения; рассчитывают тягу при приложении корректирующего воздействия по зависимости:
 ,
,
где Fi - тяга двигателя с i-м условным номером, Н;
 - коэффициент трансформации, Н/A·В½;
- коэффициент трансформации, Н/A·В½;
индекс "тест" относится к определениям тяг двигателей коррекции при проверочных включениях;
Ii - среднее значение анодного тока, А;
Ui - среднее значение напряжения на электродах, В;
определяют номинальную зависимость сидерического периода обращения после коррекции удержания (корректирующего воздействия) от текущего положения КА по долготе относительно центра орбитальной позиции; переустанавливают в инерциальном пространстве контрольную по периоду обращения плоскость, перпендикулярную плоскости экватора, проходящую через середину предстоящего текущего активного участка орбиты КА; на каждом шаге удержания передают в систему автономной навигации время середины активного участка и придают ей функцию определения по данным траекторных измерений фактического сидерического периода обращения, как разность последовательных моментов пересечения КА этой плоскости; если фактические сидерические периоды обращения расходятся с прогнозируемыми периодами более чем на величину максимальной ошибки определения и прогнозирования периода, - переходят в неавтономный режим удержания и планируют проверочные включения двигателей для уточнения коэффициентов трансформации силы тока и напряжения в тягу двигателя; и посредством всей совокупности коррекций вызывают и поддерживают устойчивый центростремительный эффект эволюции КА на орбитальной позиции.
Реализация предлагаемого способа предполагает выполнение следующей последовательности операций:
1. На начальных этапах функционирования КА проводят траекторные измерения.
На начальных этапах функционирования КА траекторные измерения проводятся с использованием только наземных измерительных средств.
2. Прикладывают проверочное воздействие.
Проверочное воздействие - это корректирующее воздействие на КА, имеющее своей целью изменение (коррекцию) параметров движения КА на величину, необходимую и достаточную для уверенного определения по изменению этих параметров тяги двигателя коррекции или, то же самое, - ускорения от работы двигателя коррекции.
3. Измеряют силу анодного тока I и напряжение на электродах U и осредняют их значения на интервале включения первого двигателя. В результате получают Iтест, Uтест.
4. Проводят траекторные измерения.
5. Определяют тягу i-го двигателя Fтест.i и, затем, коэффициент трансформации силы тока и напряжения в тягу (ускорение).
Тягу i-го двигателя Fтест.i определяют по известным методикам, исходя из фактического значения изменения корректируемого параметра орбитального движения КА, например, периода обращения. Коэффициент трансформации ki определяется из соотношения:

где ki - коэффициент трансформации, Н/A·В½;
индекс "тест" относится к проверочным определениям тяги двигателей коррекции.
6. При проведении корректирующего воздействия (коррекции параметров движения) определяют тягу двигателя из соотношения:
 ,
,
где Fi - тяга двигателя с i-м условным номером, Н;
ki - коэффициент трансформации, Н/А·В½;
Ii - среднее значение анодного тока, А;
Ui - среднее значение напряжения на электродах, В.
Известно, что тяга двигателя в безвоздушном пространстве определяется из соотношения:

где F - тяга двигателя, Н;
 - секундный расход рабочего тела, кг/с;
- секундный расход рабочего тела, кг/с;
V - скорость ионов при выходе из двигателя, м/с.
Величину  можно связать с силой анодного тока I. По определению
можно связать с силой анодного тока I. По определению

где q-/t - величина суммарного заряда q-, участвующего в ионизации рабочего тела и проходящего через поперечное сечение проводника в электрической цепи двигателя за единицу времени.
Так как
m=k'q+,
где m - масса рабочего тела, проходящая через поперечное сечение выходного отверстия двигателя, кг;
k'=const - коэффициент пропорциональности,
и q-=k"q+,
где k"=const - коэффициент пропорциональности, постоянный, вследствие стабилизации процесса ионизации рабочего тела,
то

где k=k'/ k"=const.
Величина V характеризует кинетическую энергию ионов, которая, в свою очередь, связана с напряжением между электродами зависимостью:
где q-=m/k;
V1, V2 - скорости ионов на входе в двигатель и выходе из него, м/с.
Так как V1<<V2, то
т.е.
Подставляя уравнения (5) и (6) в уравнение (4) и представляя последнее в относительном виде для i-го двигателя коррекции, будем иметь:

Формула (7) справедлива как для текущих, так и для осредненных на интервале коррекции значений входящих в нее параметров.
В результате имеют по всем двигателям коэффициенты трансформации силы тока и напряжения в тягу двигателя:
i=1, 2, 3,… - условные номера двигателей коррекции.
П.п.1-5 повторяют, пока не проверят работу каждого двигателя коррекции.
Начальный этап функционирования КА включает в себя этапы проверок работы двигателей и приведения КА на заданную орбитальную позицию. На дальнейших этапах проверочные воздействия планируют с учетом того, чтобы изменение контролируемых параметров орбиты были достаточными для надежного и точного (~3-5%) определения по ним величины тяги двигателя.
П.6 используют при дальнейшей работе с КА.
7. Выбирают линию удержания центра масс КА на заданной орбитальной позиции в координатах на фазовой плоскости [Т- сидерический период; λ - гринвичская восточная долгота], стремление к которой, несмотря на ошибки управления, создает устойчивый центростремительный эффект эволюции - вызывает гарантированное стремление КА к центру орбитальной позиции.
Линия удержания (парадигма) может иметь довольно сложный вид, однако суть сводится к прямой, проходящей на плоскости [Т; λ] через центр орбитальной позиции снизу вверх и слева направо под выбранным опытным путем углом наклона к одной из осей координат. Вот именно приведенная суть парадигмы удержания не имеет до сих пор аналогов, отвечает критериям «новизна» и «изобретательский уровень» и не следует из уровня техники,
Например, определяют номинальную зависимость сидерического периода обращения после одновременной коррекции удержания вектора наклонения орбиты и периода обращения КА от текущего положения КА по долготе относительно центра орбитальной позиции по формуле:

где Тном - номинальный сидерический период обращения за коррекцию в очередном шаге удержания, с;
Тзв=86164,09 с - звездные сутки;
В=ΔT+A·δF+C - погрешность ожидания периода обращения с учетом проведенного шага удержания, с;
ΔT - максимальная погрешность определения периода обращения, с;
А - максимально возможная величина приращения периода за один шаг удержания, с;
δF - максимальная относительная погрешность реализации тяги двигателя;
С - максимально возможное на геостационарной орбите изменение периода обращения за счет геопотенциала в течение полусуток, зависит от долготы центра орбитальной позиции, не превышает 0,24 с;
Δλ - отклонение текущей средней долготы от долготы «стояния» - центра орбитальной позиции, угл. мин;
Δλгарант - гарантированная область удержания КА по долготе, получаемая вычетом из номинальной области погрешности определения долготы и долготных колебаний за счет эксцентриситета, наклонения и лунно-солнечных возмущений, угл. мин;
Δλном - номинальный диапазон удержания, угл. мин.
Средняя долгота - долгота при отсутствии эксцентриситета орбиты, рассчитывается как средняя величина между долготами перигея и апогея орбиты КА.
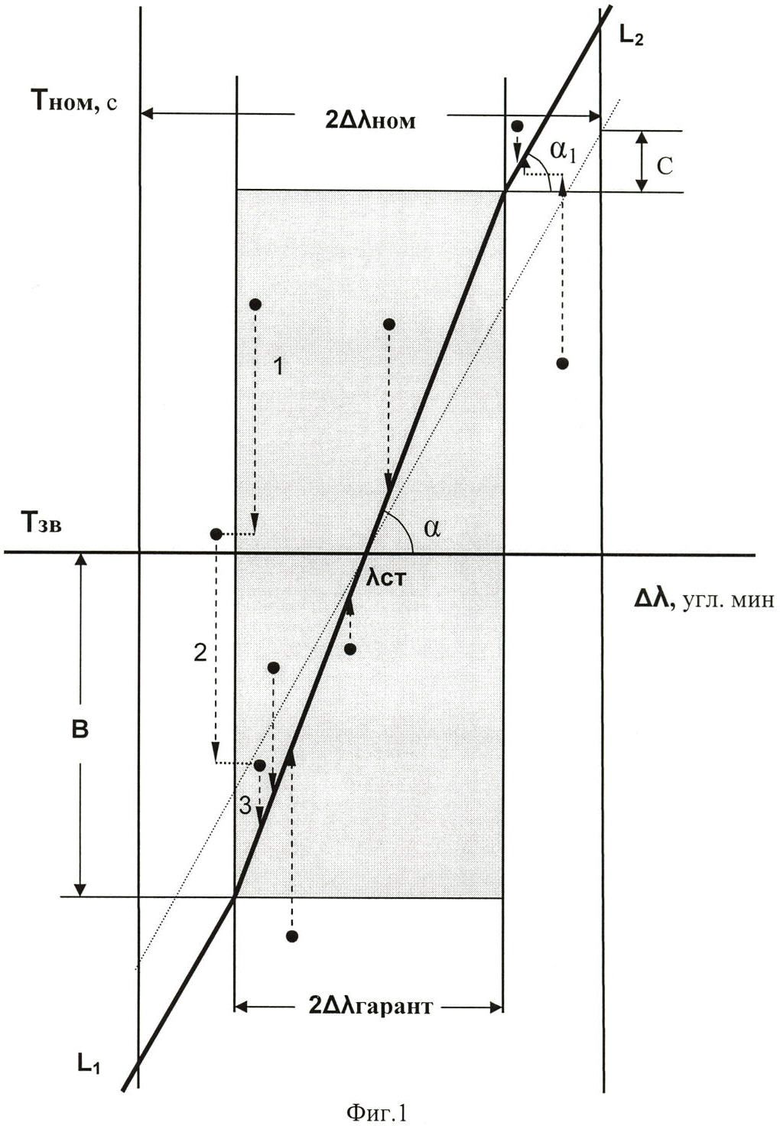
Данная зависимость включает погрешности определения КА на фазовой плоскости [Т;  ], учет этой зависимости минимизирует либрацию КА за счет геопотенциала и любые уходы КА по долготе в процессе эксплуатации. Если КА находится вне гарантированной области, данную зависимость можно использовать в процессе микроперевода КА на долготу «стояния». График зависимости приведен на фиг.1, где L1L2 - линия стратегии удержания,
], учет этой зависимости минимизирует либрацию КА за счет геопотенциала и любые уходы КА по долготе в процессе эксплуатации. Если КА находится вне гарантированной области, данную зависимость можно использовать в процессе микроперевода КА на долготу «стояния». График зависимости приведен на фиг.1, где L1L2 - линия стратегии удержания,
Стратегия удержания в этом случае заключается в том, что точкой прицеливания всегда остается точка [λст; Тзв], ориентация в фазовом пространстве [Т; λ] (или [Т; Δλ]) линии стратегии удержания принципиально одна и та же, уходы КА по долготе за счет либрации КА (нецентральность геопотенциала), это - главное, имеют всегда, пусть не за одну, но за 2-3 одновременные коррекции периода и наклонения (в зависимости от угла отклонения вектора тяги двигателя от нормали к орбите в плоскости рысканья) желаемое направление к центру орбитальной позиции, и, при установившемся процессе удержания, отклонения по средней долготе от долготы «стояния» составляют не более ± 1угл. мин, по периоду от звездных суток не более ±2 с. В этой области КА находится гарантированно в течение всего срока эксплуатации, при условии бесперебойной работы системы автономной навигации либо при непрерывном определении параметров движения КА на средствах наземного комплекса управления.
8. Определяют прямое восхождение середины предстоящего активного участка (АУ).
Прямое восхождение середины предстоящего АУ рассчитывают по условию изменения вектора наклонения орбиты КА (формула (3/), [2]). При планировании коррекции эксцентриситета орбиты или периода обращения (долготы) КА прямое восхождение середины предстоящего АУ определяют прогнозированием по известным критериям, соответственно, как прямое восхождение ближайшей предстоящей апсидальной точки орбиты - перигея или апогея или как прямое восхождение требуемой для минимизации эксцентриситета апсидальной точки орбиты КА.
9. Задают в инерциальном пространстве контрольную плоскость (КП), перпендикулярную плоскости экватора и проходящую через середину предстоящего АУ орбиты КА и через его смещение на 2¶.
10. Определяют моменты пересечения КА КП.
Прямое восхождение середины предстоящего АУ и моменты пересечения КА КП определяются программой прогнозирования, входящей в состав программного бортового или наземного баллистического обеспечения полета по условиям равенства прямых восхождений КА и середины АУ, а, также, равенства прямых восхождений КА и смещения середины АУ на 2π:


Принципиально важно, что при расчете параметров коррекции (одно-два включения двигателя(ей) на суточном интервале) всегда исходят из того, что изменение контрольного корректируемого параметра, которым чаще всего выступает период обращения (он изменяется всегда - при коррекциях долготы и при коррекциях наклонения), можно «прочитать» после прохождения КА контрольной плоскости с высокой точностью, т.к. ошибки управления не успевают повлиять на результат коррекции. Однако это не совсем так. Отказ от контрольной (в части определения сидерического периода обращения) плоскости, традиционно совпадающей с плоскостью XOZ инерциальной геоцентрической экваториальной системе координат (ось Х направлена в точку Весны) при проведении ежесуточных коррекций и непрерывных траекторных измерениях, и перенесение ее в αАУ позволяет полностью исключить методическую погрешность расчета параметров коррекции, которая сильно сказывается на качестве процесса удержания КА. Ошибка ΔT1 определения сидерического периода обращения оценивается для средств траекторных измерений в (0,1-0,2) с; изменение периода за коррекцию на сутках номинально составляет (0,5-1,5) с, и уточнение ускорений от работы двигателей (относительная погрешность 3-5%) позволяет соответственно рассчитывать на погрешность ΔТ2 знания [изменения] периода не более 0,1 с. И ΔT1, и ΔТ2 - величины небольшие, однако реальное отклонение сидерического периода обращения от ожидаемого составляет до 1,5 с. Причина объяснима на таком примере. Если середине АУ соответствует время tАУ, а пересечению плоскости XOZ, по сидерическому периоду обращения традиционно принимаемой за контрольную, соответствует время tXOZ, отстоящее от tАУ на полупериод (сидерический период до коррекции считаем истинным), получим сидерический период обращения, в который войдет лишь половина реализованной за коррекцию средней скорости КА, а при близких значениях tAУ и tXOZ, когда tXOZ>tАУ, в сидерическом периоде реализованная за коррекцию средняя скорость КА и вовсе не отразится. А планировать коррекции надо на каждые и каждые сутки. Указанная погрешность (1,5 с) недопустима для областей удержания ±3 угл. мин, не позволяет рассчитывать на удержание в более узких областях и проводить тонкую коллокацию (удержание нескольких КА в одной и той же узкой области).
Установка КП в середину АУ обусловлена не импульсной выдачей расчетного импульса тяги двигателя.
Имеют время пересечения КП 
11. Рассчитывают параметры коррекций.
План коррекций состоит из одной-двух коррекций, являющих собой, не считая время на переход с одного двигателя на другой (секунды) единый активный участок.
Параметры коррекций (время включения, длительность работы и условный номер двигателя) рассчитывают по известным методикам, например, [2], для тяги F1, если планируется работа одного двигателя, либо для тяг F1, F2, если планируется работа парой двигателей. В последнем случае от tвкл (формула (3), [2]) нужно отнять половину времени перехода на другой двигатель коррекции, как правило, менее 5 минут.
12. Прогнозируют движение центра масс КА до очередного пересечения зафиксированной ранее в инерциальном пространстве контрольной плоскости.
Имеют время пересечения КП  .
.
13. Определяют сидерический период обращения как разность прогнозируемых моментов пересечения КП:
 .
.
Если на суточном интервале планируется еще один АУ, например, при двухимпульсной коррекции эксцентриситета орбиты, когда включения двигателей разнесены на половину периода обращения, то п.п.8-13 не повторяют, считая исходный сидерический период обращения достаточным для планирования обоих разнесенных на половину оборота включений двигателей коррекции.
14. На этапе автономного функционирования время середины АУ передают в систему автономной навигации (САН).
САН постоянно рассчитывает прямое восхождение КА, по условиям (8), (9) в режиме реального времени определяет фактические моменты пересечения КА КП и определяет фактический сидерический период обращения. Ранее САН такую функцию не выполняла.
Этап автономного функционирования начинается с включения в работу САН, занимающейся в непрерывном режиме траекторными измерениями - измерениями дальностей до опорных объектов, их производными по времени или сбором и обработкой информации от бортовых астроприборов. На этапе автономного функционирования КА по целевому назначению траекторные измерения представляют собой типовую работу борта. В рабочем цикле управления движением центра масс КА (одни сутки) параметры движения центра масс КА известны на любой момент времени. Поэтому в перечне операций по данному способу для этапа автономного функционирования КА по целевому назначению траекторные измерения далее упоминаться не будут.
15. Прикладывают корректирующее воздействие для выполнения орбитального маневра.
16. Измеряют силу анодного тока и напряжение на электродах и осредняют их значения на интервале включения двигателя.
Операции 15, 16 аналогичны операциям п.п.2, 3. В результате получают Ii, Ui.
17. Определяют тягу двигателя из соотношения:
П.17 - конкретная простановка п.6 в циклограмму работы с КА.
18. В расчетное время прекращают работу двигателя.
П.16 исполняется бортовым программным обеспечением либо в наземном комплексе управления по снятию бортовых отчетов телеметрии.
19. Проводят текущую корректировку набора тяг (ускорений).
Корректировку набора тяг (ускорений) проводят независимо от результатов удержания КА с дискретностью не более 30 суток либо постоянно, согласно текущим отработкам двигателей. При этом набор коэффициентов трансформации не меняют.
20. Переходят в неавтономный режим удержания КА.
Оба режима удержания: автономный и неавтономный имеют одинаковый статус и выполняют одни и те же целевые задачи. Неавтономный режим удержания, как и автономный режим, в мирное время применяют по усмотрению эксплуатирующей структуры. Автономный режим требуется чаще для разгрузки наземного комплекса управления.
Критерием перехода в неавтономный режим могут служить систематические расхождения фактических периодов обращения с прогнозируемыми периодами на величину, более максимальной ошибки (ΔТ1+ΔТ2) п.10.
21. Если на циклическом интервале неавтономного удержания КА (в промежутке между траекторными измерениями средствами наземного комплекса управления КА) фактические сидерические периоды обращения расходятся с прогнозируемыми периодами более чем на величину максимального изменения периода за одну коррекцию, - проводят проверочные включения двигателей для уточнения коэффициентов трансформации силы тока и напряжения в тягу (ускорение).
Это исключительно важно при удержании КА в неавтономном режиме, в котором фактические периоды обращения - периоды, полученные из данных траекторных измерений с наземного комплекса управления, а прогнозируемые периоды обращения искажены суммарными систематическими ошибками реализации тяги на достаточно большом интервале времени.
22. Создают центростремительный эффект эволюции КА.
Посредством коррекций вызывают и поддерживают в течение сколь угодно длительного времени устойчивый центростремительный эффект эволюции КА на орбитальной позиции.
Коррекции удержания являются первичными физическими операциями, вызов центростремительного эффекта эволюции КА, обусловленного сменой парадигмы удержания, - вторичными физическими операциями над объектом, а сам центростремительный эффект является отличительным физическим свойством объекта-способа.
Далее п.п.1-22 повторяются в течение срока активного существования КА.
При любых переводах КА на геостационарной орбите проводят проверочные включения двигателей согласно п.п.1-5.
В неавтономном режиме функционирования КА на наземных пунктах управления будет иметься набор фактических ускорений по всем работавшим двигателям, который в два-три раза точнее номинального (формулярного) набора, что, вкупе с заданием на интервале прогнозирования движения центра масс КА новой КП, и новой парадигмы удержания позволит увеличить время рабочего цикла управления движением, либо, также, как и в автономном режиме, уменьшить реальный диапазон удержания КА на геостационарной позиции.
Итак, необязательно иметь КП, строго фиксированную в инерциальном пространстве. Для определения периода обращения КА достаточно держать эту КП в инерциальном пространстве в течение времени отработки текущего плана коррекций, кратном, в зависимости от плана, 1-2 оборотам КА, после чего КП выставляется строго на середину предстоящего АУ.
Предлагаемый способ удержания геостационарного КА позволяет:
1) практически полностью исключить необходимость проведения коррекции периода обращения двигателями коррекции долготы, чем снизить энергозатраты;
2) повысить точность удержания по долготе с ±0,1° до гарантированной ±0,05°.
В отсутствие конкурирующих технических решений, на предприятии предполагается провести отработку вышеприведенного способа удержания в 2011 г. и в полной мере использовать его на геостационарных КА с 2012 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2708468C1 |
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2486111C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2020 |
|
RU2729347C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2487823C1 |
| СПОСОБ ОДНОВРЕМЕННОЙ КОРРЕКЦИИ УДЕРЖАНИЯ ВЕКТОРА НАКЛОНЕНИЯ КРУГОВОЙ ОРБИТЫ И ПЕРИОДА ОБРАЩЕНИЯ ТРЕХОСНОСТАБИЛИЗИРОВАННОГО КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2381965C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2559371C2 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
Изобретение относится к космической технике и может быть использовано для удержания геостационарного космического аппарата (КА) в заданном диапазоне долгот и широт рабочей позиции на орбите. Ошибка управления движением центра масс КА комплексно устраняется с использованием коэффициента трансформации силы тока и напряжения в плазменных двигателях в тягу двигателя и переустановкой контрольной по периоду обращения КА плоскости в центр активного участка орбиты. Выбирается номинальная линия (парадигма) удержания в плоскости и посредством коррекций вызывается и поддерживается в течение длительного времени устойчивый центростремительный эффект эволюции КА на орбитальной позиции. Изобретение позволяет повысить точность удержания по долготе, исключить коррекцию периода обращения по долготе и снизить энергозатраты. 1 ил.
Способ удержания геостационарного космического аппарата (КА) на заданной орбитальной позиции, включающий определение требуемого угла отклонения вектора тяги двигателя от нормали к орбите в плоскости рысканья, исходя из обеспечения заданной точности исполнения коррекции периода обращения космического аппарата и требуемых изменений за коррекцию трансверсальной и ортогональной составляющих вектора скорости космического аппарата, задание отклонения направлений векторов тяги двигателей, расчет длительности работы двигателей по формулам:
где τ1, τ2 - длительности работы двигателей, с;
Jn, Jτ - импульсы тяги, требуемые для коррекций соответственно вектора наклонения орбиты и периода обращения КА, Н·с;
F1, F2 - тяги двигателей, Н;
θ1, θ2 - углы отклонения векторов тяги двигателей от нормали к плоскости орбиты в плоскости рысканья по наименьшей дуге, и проведение коррекции парой двигателей, установленных по разные стороны от нормали к орбите, для чего производят последовательно их включения на расчетные длительности работы, отличающийся тем, что: прикладывают проверочное воздействие к корпусу КА путем включения двигателя; измеряют значения анодного тока и напряжения на электродах плазменного двигателя в процессе приложения проверочного и корректирующего воздействий; осредняют полученные значения на всем интервале измерения; рассчитывают тягу при приложении корректирующего воздействия по зависимости:
где Fi - тяга двигателя с i-м условным номером, Н;
 - коэффициент трансформации, Н/А·В1/2;
- коэффициент трансформации, Н/А·В1/2;
индекс "тест" относится к проверочным определениям тяги двигателей коррекции;
Ii - среднее значение анодного тока, А;
Ui - среднее значение напряжения на электродах, В;
определяют номинальную зависимость сидерического периода обращения после коррекции удержания от текущего положения КА по долготе относительно центра орбитальной позиции; переустанавливают в инерциальном пространстве контрольную по периоду обращения плоскость, перпендикулярную плоскости экватора, проходящую через середину предстоящего текущего активного участка орбиты КА; на каждом шаге удержания передают в систему автономной навигации время середины активного участка и придают ей функцию определения по данным траекторных измерений фактического сидерического периода обращения как разность последовательных моментов пересечения КА этой плоскости; если фактические сидерические периоды обращения расходятся с прогнозируемыми периодами более чем на величину максимальной ошибки определения и прогнозирования периода, переходят в неавтономный режим удержания и планируют проверочные включения двигателей для уточнения коэффициентов трансформации силы тока и напряжения в тягу двигателя; и посредством всей совокупности коррекций вызывают и поддерживают устойчивый центростремительный эффект эволюции КА на орбитальной позиции.
| СПОСОБ ОДНОВРЕМЕННОЙ КОРРЕКЦИИ УДЕРЖАНИЯ ВЕКТОРА НАКЛОНЕНИЯ КРУГОВОЙ ОРБИТЫ И ПЕРИОДА ОБРАЩЕНИЯ ТРЕХОСНОСТАБИЛИЗИРОВАННОГО КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2381965C1 |
| СПОСОБ УПРАВЛЕНИЯ КЛАСТЕРОМ НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ СПУТНИКОВ (ВАРИАНТЫ) | 2004 |
|
RU2284950C2 |
| EP 780297 B1, 14.11.2001 | |||
| EP 790542 B1, 19.01.2000. | |||

