Изобретение относится к области космической техники и может быть использовано для управления движения центром масс космического аппарата (КА) в фазовых плоскостях векторов наклонения и эксцентриситета относительно других КА, находящихся в единой области удержания.
Как правило, коллокацию КА проводят по согласованным схемам. Все схемы-аналоги сводятся к равноудалению точек прицеливания векторов en [en,(Ω+ω)n] (n=1,2,…) и in [in,Ωn] (n=1,2,…) в соответствующих фазовых плоскостях КА и поддержанию концов векторов en и in внутри соответствующих областей выбранных радиусов, центрами которых являются соответствующие точки прицеливания. Идеальным вариантом считается для двух КА разнесение долгот восходящих узлов (Ωn) и прямых восхождений перигеев (Ω+ω)n точек прицеливания на 180°, причем аргументы широты перигеев КА должны быть близки нулю. Для трех КА цифру 180 заменяют на 120. Такой принцип коллокации общеизвестен, он следует из уровня техники. Однако за кажущейся простотой схем скрывается сложная и затратная процедура управления векторами коллокации.
Известен способ управления кластером находящихся на геостационарной орбите спутников (RU 2284950 C2), который взят за прототип. Согласно данному способу, включающему измерение параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА, сравнение их с требуемыми и проведение коррекций периода обращения, наклонения и эксцентриситета орбиты, маневры на каждом из КА проводят с помощью двигателей малой тяги, переводя векторы наклонения in КА (n - условный номер КА) в разнесенные относительно друг друга кольцевые области их допустимого изменения так, чтобы угол между линией, соединяющей текущее положение конца каждого вектора с центром соответствующей ему кольцевой области, и направлением на Солнце был равен увеличенной на 180° величине прямого восхождения Солнца, одновременно проводят коррекции векторов эксцентриситета en с целью перевода этих векторов в разнесенные относительно друг друга кольцевые области их допустимого изменения так, чтобы линия, соединяющая текущее положение каждого вектора с центром соответствующей ему кольцевой области, (далее варианты):
1) отставала от направления на Солнце на половину углового расстояния при движении вектора эксцентриситета по окружности естественного дрейфа в пределах кольцевой области, далее на протяжении всего полета производят изменение относительного расстояния между КА в требуемых пределах за счет компенсации квазивекового приращения вектора наклонения каждого КА в сочетании с коррекцией вектора эксцентриситета, при которой в момент прохождения вектором эксцентриситета середины интервала между точкой входа окружности естественного дрейфа в кольцевую область допустимого изменения вектора эксцентриситета и точкой выхода из этой области линия, соединяющая центр окружности естественного дрейфа и центр соответствующей ему кольцевой области допустимого изменения вектора эксцентриситета, совпадала с направлением на Солнце, приводя тем самым к постоянству относительные векторы наклонения и эксцентриситета между КА;
2) совпадала с направлением на Солнце, далее на протяжении всего полета производят изменение относительного расстояния между КА в требуемых пределах за счет компенсации квазивекового приращения вектора наклонения каждого КА без коррекции вектора эксцентриситета, приводя тем самым к постоянству относительные векторы наклонения и эксцентриситета между КА.
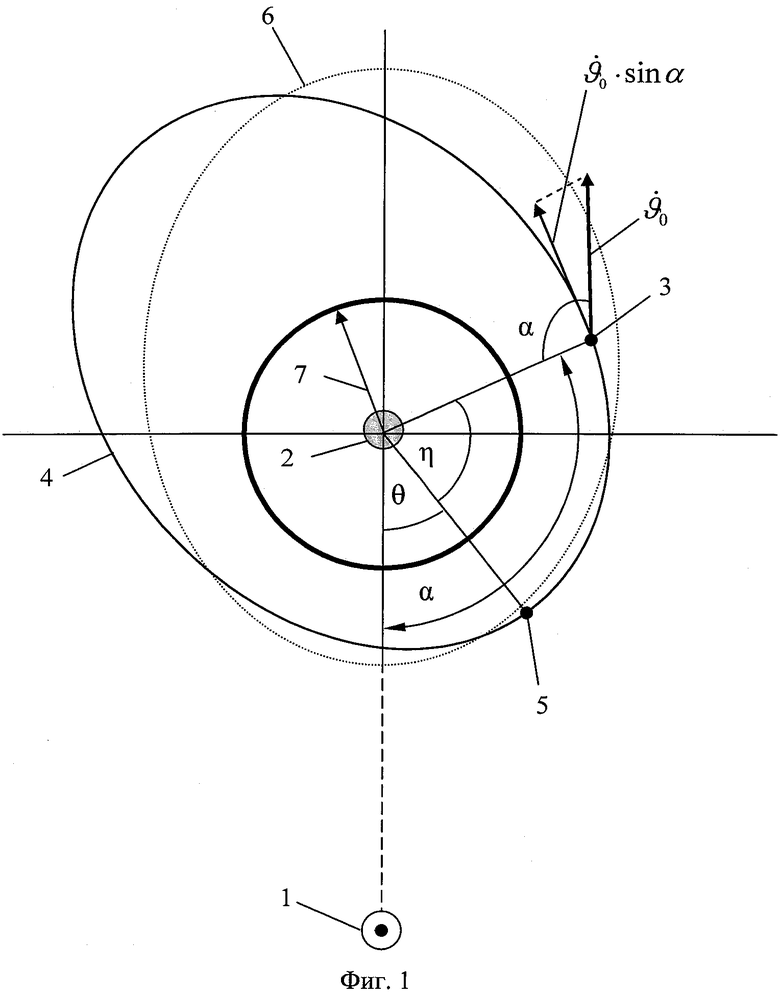
Здесь «окружность естественного дрейфа» - окружность радиуса устойчивого эксцентриситета(фиг. 1).
Суть данного способа сводится к синхронизации движения концов векторов наклонения и эксцентриситета орбиты КА в соответствующих фазовых плоскостях [ix; iy] и [ex; ey], где ix=i·cosΩ; iy=isinΩ; ex=e·cos(Ω+ω); ey=e·sin(Ω+ω); Ω - долгота восходящего узла орбиты КА; ω - аргумент широты перигея; (Ω+ω)= απ - прямое восхождение направления на перигей орбиты КА, причем синхронизации движения КА в обеих плоскостях, синхронизации принудительной, поскольку взаимная ориентация относительных векторов эксцентриситета и наклонения ΔE и ΔI 2-3 КА не сохраняется при годовой цикличности эволюции конца вектора эксцентриситета по окружности естественного дрейфа и существующей при условии компенсации только вековых возмущений вектора наклонения полугодовой цикличности эволюции конца вектора наклонения по окружности естественного дрейфа. Обе цикличности доминантные и обязаны своим существованием исключительно Солнцу, потому начальная и текущая ориентации векторов наклонения и эксцентриситета относительно Солнца являются необходимым условием достижения технического результата. «Устранение только векового возмущения при совместном управлении спутниками, как правило, не используют, поскольку при несогласованных положениях спутников в части полугодовых возмущающих членов векторов наклонения их различие может составить 0,05°. Однако специальным выбором начальных положений векторов наклонения спутников и при малой периодичности проведения коррекций наклонения (т.е. на спутниках с относительно малой тягой) можно обеспечить, при коррекции только вековой части, синфазную эволюцию положения векторов наклонения спутников по окружностям радиусом 0,025° таким образом, что вектор их разности будет сохранять близкое к постоянному направление».
Недостатками прототипа являются:
1) отсутствие математической формулы «специального выбора начальных положений векторов наклонения» (нет формулы - нет четкого представления совершаемого);
2) «специальный выбор начальных положений векторов наклонения» предполагает специальный выбор центров кольцевых областей (точек прицеливания) или исходит из него, что тоже требует математического обоснования, но, если говорить просто (об этом никак не сказано в прототипе), прямое восхождение Солнца (сезон) и начальный вектор наклонения (модуль наклонения и восходящий узел орбиты КА) определяют текущее положение годографа кругового движения конца вектора наклонения («солнечного круга») и текущий вектор изменения приращения наклонения, возможные центры кольцевых областей располагаются на окружности радиуса годографа с центром в точке конца начального вектора наклонения;
3) если синфазное следование концов векторов наклонения орбит КА в инерциальном пространстве по окружностям естественного дрейфа, либо по границам кольцевых областей их допустимого изменения имеет место: из n точек (начальных условий КА) в фазовой плоскости начинается именно синфазное (с коррекцией вековых возмущений или без) движение по n трассам, то синфазное следование векторов эксцентриситетов орбит КА по своим окружностям естественного дрейфа, либо по границам кольцевых областей их допустимого изменения выбором начальных условий (кроме как совмещением векторов эксцентриситетов всех КА по модулю и направлению) нельзя организовать в принципе, даже если радиус окружности принудительного движения равен устойчивому эксцентриситету. Это очевидно вытекает из рассмотрения формулы (12'). Например, при диаметрально расположенных перигеях движение не только не синфазно, но и направлено навстречу друг к другу; из n точек (начальных условий КА) в фазовой плоскости начинается несинфазное (с коррекцией удержания или без) движение по n трассам, поскольку углы θ в единый момент времени отличаются друг от друга на величину рассогласования направлений на перигеи). В невозможности синфазного движения концов векторов эксцентриситета орбит КА можно убедиться на основании собственных расчетов. Только частотой проведения коррекций удержания, влекущей значимые энергозатраты, можно добиться желаемого результата;
4) соблюдение, в идеале, постоянства разности векторов (расстояния между концами векторов наклонения, эксцентриситета всех (n) КА и постоянства расстояний между концами векторов наклонения и эксцентриситета каждого КА) не является необходимым и достаточным фактором коллокации, обеспечивающим гарантированное разнесение КА в истинном пространстве и в фазовых плоскостях. Для гарантий качественной коллокации необходимо соблюдать постоянство разнесения векторов наклонения и эксцентриситета по Ω и απ, поскольку при сближенных и даже пересекающихся областях допустимого изменения концов векторов in и en соответствующие их синхронному движению расхождения по Ω и απ могут достигать порядка 90°. Это происходит потому, что хотя движения концов векторов наклонения при естественном дрейфе с компенсацией вековых возмущений равномерное, центры «солнечных кругов» в общем случае не являются началом координат фазовой плоскости [ix;iy]. Если учесть еще различия в средних скоростях движения вектора наклонения и эксцентриситета, то возможны варианты, когда

или

или (при i1≈i2≈0)

т.е. когда фокальные параметры p орбит КА, зависимость которых от величины эксцентриситета ничтожно мала [p=a(1-е2), где a - большая полуось орбиты], практически совпадают, в результате чего неизбежно критическое сближение в истинном пространстве двух КА вне зависимости от величин разности модулей наклонения и модулей эксцентриситета.
Коллокация в прототипе, как и в аналогах, рассматривается как способ управления движением центров масс, гарантирующий от столкновений КА. Эта задача актуальна, но только в принципе, и удовлетворительно решается для двух КА (даже при нулевых наклонениях) при условиях:

т.е. тогда, когда восходящие узлы орбит равны, для каждой из орбит линия узлов совпадает с линией апсид, направления на восходящий узел и перигей одной из орбит совпадают, другой - взаимно противоположны. Гарантированное минимальное межспутниковое расстояние, при реальном эксцентриситете орбит КА ~0,00015, составляет 12,6 км.
Другая задача коллокации - не мешать находящимся рядом КА работать по целевому назначению. Если ориентироваться на условия (2), в районах узлов орбит, при практически одинаковых периодах обращения (отклонение от звездных суток редко когда составляет более 5 с), возникают взаимно попеременные помехи связи космических аппаратов с Землей.
И такая задача наилучшим образом для двух КА решается при условиях:

т.е. тогда, когда для каждой из орбит линия узлов перпендикулярна линии апсид, и линии узлов взаимно перпендикулярны. Центры управления всеми КА, находящимися в единой области удержания по широте и долготе, следуют единой стратегии коллокации, обмениваясь баллистической информацией.
Однако для гарантированной коллокации требуется перманентный процесс обмена баллистической информацией между центрами управления КА. Такой процесс может давать сбои, и сбои обязательно будут происходить. Кроме того, нельзя исключать принципиальную невозможность взаимодействия между центрами управления КА. Проще находиться в состоянии автономной коллокации (самоколлокации): когда к процессу коллокации не привлекаются другие КА и их центры управления. При постановке такой задачи следует учитывать, что линия узлов и линия апсид орбиты смежного КА могут пересекаться под произвольным углом. Далее по тексту под КА с самоколлокацией (КАСК) подразумевается КА, «взявший» на себя всю ответственность по коллокации в заданной области удержания по широте и долготе.
Идея не затратной автономной коллокации, не накладывающей никаких сколько-нибудь значимых обязательств на центр управления смежным КА (что означает наличие или отсутствие действий по реализации согласованной стратегии коллокации со стороны такого центра управления), позволяющей за счет настройки векторов наклонения и эксцентриситета обходить в течение суток лучи от всех антенн, включая глобальные, на смежном КА, не создавая тем самым экранирующих эффектов, представляется актуальной и наиболее эффективной. Идея автономной коллокации не имеет аналогов.
Целью изобретения является реализация вышеуказанной идеи.
Поставленная цель достигается тем, что в способе автономной коллокации на геостационарной орбите, включающем переводы векторов наклонения и эксцентриситета на границы разнесенных относительно друг друга областей прицеливания (областей допустимого изменения векторов наклонения и эксцентриситета), измерения параметров орбиты каждого КА, определение по ним текущих значений орбитальных элементов каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты, введены новые операции, заключающиеся в том, что за время до приведения КАСК в заданную область удержания по широте (наклонению) и долготе по данным независимых траекторных измерений выявляют стратегию управления движением центра масс смежного КА, в процессе удержания уточняют положение центра области прицеливания по наклонению смежного КА, проведением коррекций наклонения вектор наклонения орбиты КАСК в фазовой плоскости с учетом сезона (текущего прямого восхождения Солнца) выставляют так, чтобы линия узлов орбиты КАСК стала перпендикулярна линии узлов орбиты смежного КА и центр области прицеливания, включающей годограф вектора наклонения орбиты КАСК, смещают по перпендикуляру из начала координатной системы [ix;iy] относительно линии, соединяющей это начало с центром области прицеливания смежного КА, на величину расстояния между этим центром и началом координатной системы, проводят регулярные коррекции эксцентриситета для удаления направления на перигей от направления на восходящий узел орбиты КАСК на величину угла рассогласования между направлениями на перигей и восходящий узел орбиты смежного КА и поддержания такого положения перигея заданных пределах области прицеливания по эксцентриситету, проводят регулярные коррекции наклонения орбиты КАСК, вызывающие, при поддержании прямого угла между линиями узлов орбит КА, следование конца вектора наклонения его годографу, на КАСК переопределяют центры областей прицеливания по наклонению и эксцентриситету орбиты КАСК при корректировке стратегии управления движением центра масс смежного КА и при нарастании угла рассогласования между линией апсид и линией узлов орбиты КАСК, в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы и эксцентриситета орбиты.
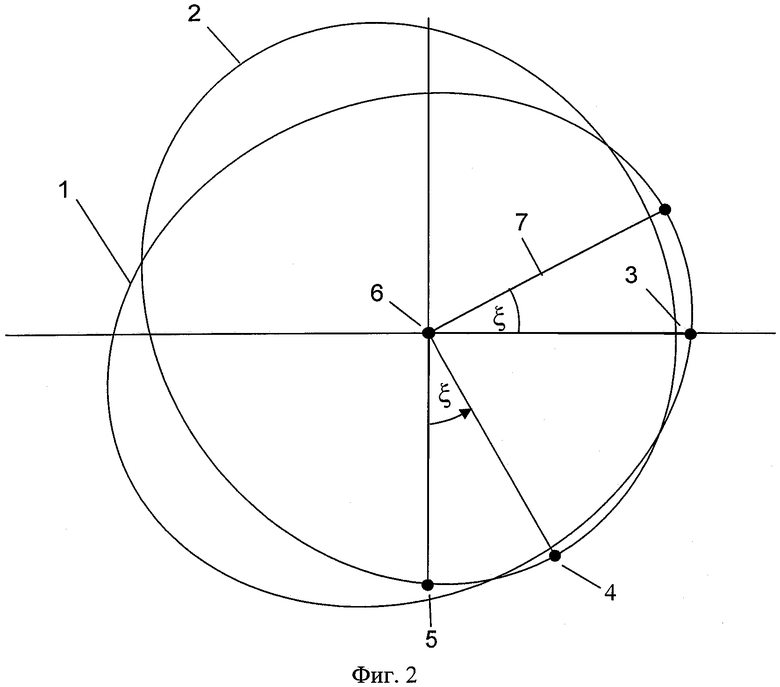
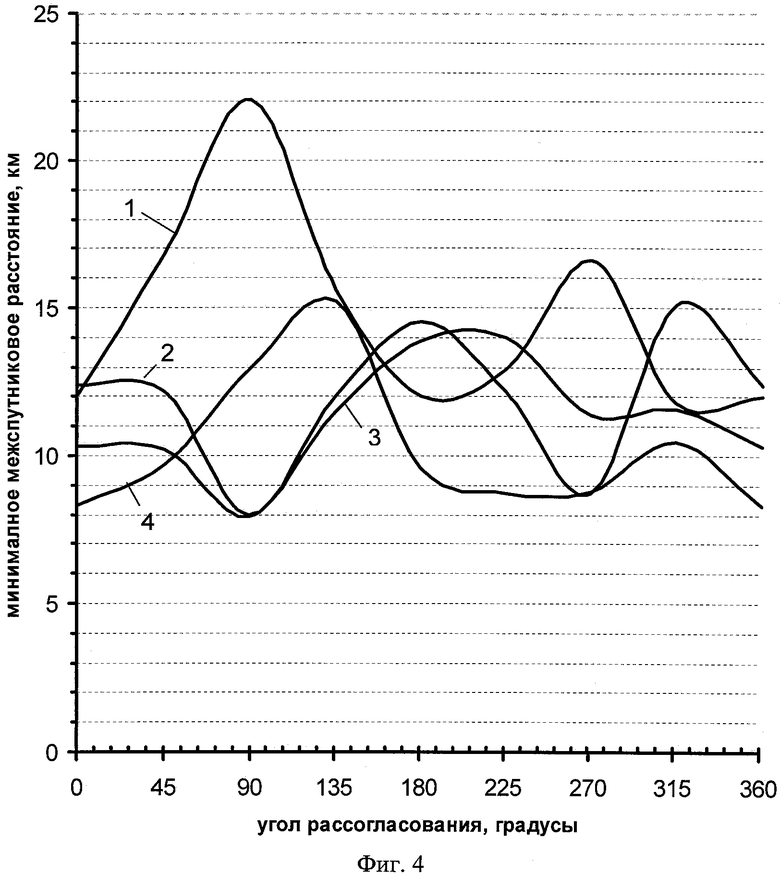
Задача автономной коллокации, как показывают геометрия расположения составляющих элементов векторов наклонения и эксцентриситета в инерциальном пространстве (фиг. 2) и расчеты межспутниковых расстояний (фиг. 4), оптимальным образом решается при условиях:

где индекс «1» соответствует КАСК, индекс «2» соответствует смежному КА, т.е. тогда, когда линии узлов орбит КАСК и смежного КА пересекаются под прямым углом, линии апсид орбит КАСК и смежного КА пересекаются под прямым углом, угол рассогласования (ξ) между прямым восхождением перигея и восходящим узлом орбиты смежного КА равен углу рассогласования между прямым восхождением перигея и восходящим узлом орбиты КАСК. На фиг. 2 цифрами обозначено:
1 - орбита КАСК;
2 - орбита смежного КА;
3 - восходящий узел КАСК;
4 - перигей смежного КА;
5 - восходящий узел смежного КА;
6 - Земля;
7 - перигей КАСК.
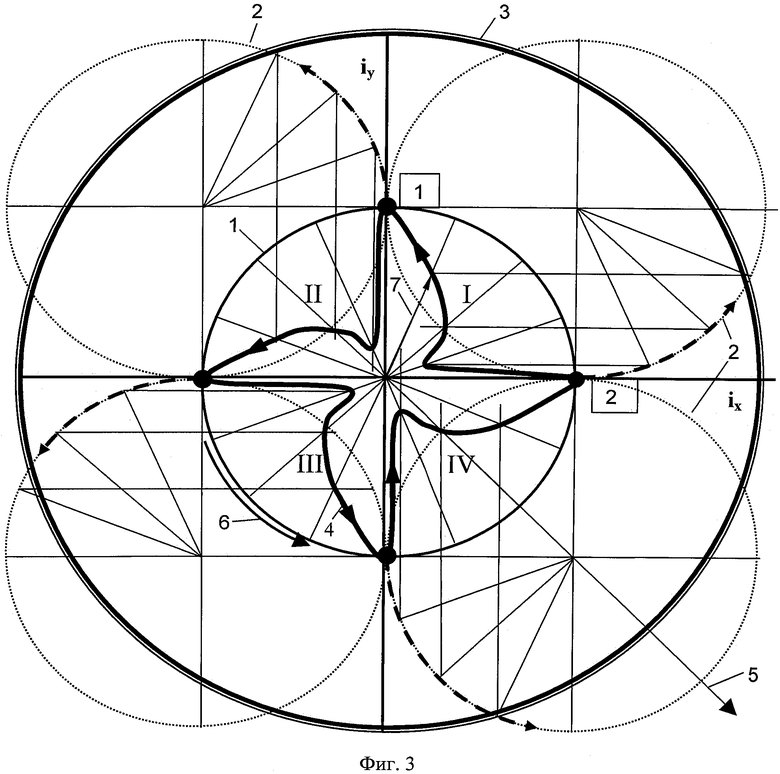
Цикл автономной коллокации отображен на фиг. 3. Введены следующие обозначения:
1 - любая область прицеливания - окружность радиуса «солнечного круга» (R≈1,5 угл.мин) естественного дрейфа конца вектора наклонения, находится в пределах номинальной области удержания;
2 - оскулирующие «солнечные круги» в узловых точках эволюции конца вектора наклонения орбит КА;
3 - номинальная область удержания по наклонению;
4 - стационарная кривая эволюции конца вектора наклонения КАСК - годограф автономной коллокации;
5 - направление на Солнце относительно выбранных начальных условий смежного
КА;
6 - направление естественного дрейфа конца вектора наклонения при компенсации только вековых возмущений;
7 - радиус-вектор годографа;
I-IV - квадранты области прицеливания;
 и
и - соответственно начальные условия КАСК (1) и смежного (2) КА в начале цикла автономной коллокации.
- соответственно начальные условия КАСК (1) и смежного (2) КА в начале цикла автономной коллокации.
На фиг. 3 показан случай совмещения центров областей прицеливания КАСК и смежного КА с началом координат фазовой плоскости [ix;iy]. Пунктирными линиями на фиг. 3 показаны эволюции конца вектора наклонения любого КА при условии компенсации только вековых возмущений от Луны и Солнца и заданном прямом восхождении Солнца. Линиями 4 показан стационарный (установившийся) принудительный дрейф конца вектора наклонения орбиты КАСК. Выбор начальных условий не принципиален. На фиг. 3 отображен принципиальный подход к расчету коррекций коллокации. Для того, чтобы восходящий узел орбиты КАСК постоянно отстоял на заданном угловом расстоянии -90° от восходящего узла орбиты смежного КА, требуются коррекции вектора наклонения орбиты КАСК такие, чтобы, основываясь на данных в контрольные времена (1÷10 сут), радиус-вектор 7 КАСК, соединяющий центр области (точку) прицеливания с концом вектора наклонения, синхронно вращался с радиус-вектором смежного КА. Размещая оскулирующие «солнечные круги» 2 с осями, проходящими через точки пересечения осей области прицеливания 1 с ее окружностью, нанося на окружности «солнечных кругов» и области прицеливания временную разметку и соединяя радиальными линиями временные метки с соответствующими центрами («солнечных кругов» и области прицеливания), затем проводя параллельные осям области прицеливания линии от временных меток «солнечных кругов» до пересечения с радиальными линиями области прицеливания, будем иметь годограф автономной коллокации - кривую положений концов радиус-вектора, относящегося к КАСК. Следует отметить, что:
1) область прицеливания для смежного КА, который не находится в состоянии коллокации, вероятнее всего, - номинальный «солнечный круг» радиуса (1,5÷1,7) угл.мин, поскольку, если это не так, то на смежном КА обязательно будут неоправданно большие (до 30%) расходы топлива - ведь тогда, доводя идею удержания до конца, придется удерживать вектор наклонения в очень узком конусе. Практически каждые сутки или равнозатратными циклами необходимо устранять дрейф по долготе восходящего узла 2°/сут, что приводит к расходу импульса скорости 17,1 м/с/год;
2) область прицеливания не может выходить за номинальную область удержания по наклонению;
3) оси симметрии годографа автономной коллокации (кривой 4), в зависимости от начальных условий (Солнца), могут иметь любую угловую ориентацию относительно осей фазовой плоскости [ix;iy], при этом форма годографа остается неизменной;
4) вне зависимости от расположений областей прицеливания по наклонению рассогласование между восходящими узлами орбит КА всегда будет составлять 90°, для чего необходимо сместить центр области прицеливания для КАСК по перпендикуляру из начала координатной системы [ix;iy] относительно линии, соединяющей это начало с центром области прицеливания смежного КА, на величину расстояния между этим центром и началом координатной системы.
Последнее соображение отвечает критерию «изобретательский уровень» и аналогов не имеет.
Кривая 4 на фиг. 3 - хорошее приближение к реальному годографу вектора наклонения автономной коллокации. На основе этого годографа, при настроечном параметре - радиусе «солнечного круга» 1,5 угл.мин, рассчитаем годовой бюджет автономной коллокации в отношении управления вектором наклонения. Приведем вначале бюджет простого удержания геостационарного КА по широте (наклонению).
Вековая составляющая iy возмущений от Луны и Солнца по наклонению составляет на интервалах времени в ~19 лет (45÷56,5) угл.мин/год. Берем среднее значение 51,75 угл.мин/год. Для срока активного существования КА порядка 15 лет среднее значение годовых возмущений вполне возможно для расчета топливного бюджета. Остановимся на расчете бюджета удержания в приращении скорости, как наиболее универсальном, не имеющим отношения к техническим характеристикам КА. Тогда бюджет удержания в приращении боковой скорости, согласно формуле:

где ΔV - годовое приращение скорости, м/с;
Δi - годовое приращение наклонения орбиты КА;
Vср - средняя скорость движения КА, 3074 м/с;
при оптимальном приложении импульса скорости в моменты, когда прямое восхождение КА равно 90°, составит 46,27 м/с/год.
Длина годографа в угловой мере составляет 11,43 угл.мин, длина окружности «солнечного круга» равна при R=1,5 угл.мин 9,42 угл.мин. Разница между длиной годографа и длиной окружности «солнечного круга», помноженная на Vcp, приводит к бюджету автономной коллокации в отношении управления вектором наклонения. Годовой бюджет автономной коллокации составляет тогда (2,01·2)=4,02 угл.мин или, согласно (5), 3,59 м/с/год. Это менее 7,2% от среднегодового бюджета удержания по наклонению.
Расходы на управление модулем вектора эксцентриситета включены в регламентные расходы на удержание КА по долготе. Что касается коррекции положения перигея, то необходимо ежегодно подворачивать в среднем на 1° в сутки аргумент широты перигея (со), чтобы линия апсид вращалась с той же скоростью (2°/сут), что и линия узлов орбиты. При номинале е=0,0002 имеем:

и за год ΔV составит 1,96 м/с. Итак, предлагаемое техническое решение требует энергозатрат в приращении характеристической скорости менее 6 м/с/год.
Принципиальным здесь является то, что никаким из возможных способов управления движением центра масс КА невозможно обеспечить постоянство скоростей вращения линии узлов и линии апсид орбиты без регулярных коррекций параметров движения КА.
Выполнение условий (4) исключает возможность реализации условий (1), (1′), (1″), являющихся безусловно недопустимыми.
Если учесть, что на интервале между траекторными измерениями 7 суток погрешность определения и прогнозирования положения вдоль орбиты 5/ составляет 4,5 км ([11 ОАО «ЭКА». Научно-технический отчет. Отработка технологии и оценка характеристик навигационно-баллистического обеспечения полетом КА 17Ф15М на этапе летных испытаний, М., 2010 г., стр. 82), прибавив 0,5 км (гарантия исключения всяких случайностей), получим гарантированную зону отчуждения КАСК Sz1=5 км по всем опорным направлениям. При наличии на борту КА автономной радионавигации (АРН), позволяющей ежесуточно проводить траекторные измерения, погрешность δlАРН определения наиболее проблемного положения (вдоль орбиты) составляет ([1], стр. 124) 300 м. Однако (вне зависимости, есть или нет на борту КАСК АРН) все же следует ориентироваться на Sz1=5 км, а зону отчуждения для смежного КА посчитаем десятикратной δlАРН поскольку баллистические сведения о смежных КА и задачу разнесения векторов наклонения и эксцентриситета в режиме самоколлокации возможно получать и решать, например, мониторингом данных от международной системы слежения за спутниками NORAD, раскрывающим тактику и стратегию удержания смежного КА. Эта система работает так же, как и бортовая радионавигация - без ошибок повиткового прогнозирования, главной составляющей которых является реализация удержания КА с помощью двигателей системы коррекции. Ошибки определения параметров движения КА за счет действия активных сил на суточном интервале не успевают проявиться в полной мере, и сам порядок воздействия активных сил не столь значителен, чтобы говорить о серьезном искажении параметров коллокации: векторов наклонения и эксцентриситета. К тому же, знание стратегии удержания смежного КА позволяет эти ошибки сводить к ошибкам определения на пассивных участках полета. Ошибки определения составляют порядка 2,5 с по периоду обращения, 1,2 угл.мин по долготе, 20 угл.с по наклонению, 0,00005 по эксцентриситету, 2° по аргументу перигея на суточных интервалах пассивного полета. Ошибки определения по периоду и долготе учитывают при задаче удержания КА в заданных границах области по долготе и к коллокации по е и i отношения не имеют. Ошибки по е, i, ω более чем удовлетворительны. Тогда гарантированная зона отчуждения Sz2 смежного КА составит 3 км, и общая гарантированная зона отчуждения Sz=8 км. Величина 
Для гарантии способ автономной коллокации включает в себя проведение коррекций уклонения. Коррекции уклонения представляют собой одновременные коррекции долготы и эксцентриситета орбиты. Коррекция долготы состоит из двух коррекций периода обращения взаимно противоположных направлений приращения периода, разнесенных по времени на 12 ч. В результате происходит изменение гринвичской долготы подспутниковой точки. Такое изменение всегда приводит к быстрейшему и гарантированному результату - разнесению КА на удовлетворительное расстояние друг от друга, после чего вступает в действие выбранная стратегия коллокации.
Сводные результаты расчетов межспутниковых расстояний, при принятых за основу начальных условиях движения КА:
приведены на фиг. 4. На фиг. 4 цифрами обозначены линии межспутниковых расстояний при условиях (4) и:

индекс «1» соответствует КАСК.
Из фиг. 4 следует, что:
1) ввиду того, что моменты прохождения аппаратами плоскости экватора разнесены на ~6 ч, КА не создают взаимных помех в работе;
2) данный способ автономной коллокации, при соблюдении условий (4) и допуске на минимальное межспутниковое расстояние в 8 км, технически осуществим.
Данный способ автономной коллокации позволяет также рассогласование по любому из условий (4) относительно номинала 90° до 25°.
Автономная коллокация (лучше - поочередная) является наиболее логичным разрешением вопроса сосуществования КА в одной области удержания на стационарной орбите. Она позволяет кратно количеству КА сократить общие энергозатраты на коллокацию в области удержания.
Предлагаемое изобретение не уступает способам-аналогам в гарантиях обеспечения безопасного сосуществования КА на геостационарной орбите, дополнительно гарантирует отсутствие радиопомех и обеспечивает всю работу по коллокации исключительно силами центра управления КАСК.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2018 |
|
RU2703696C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721813C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2716394C1 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2013 |
|
RU2558959C2 |
| СПОСОБ УДЕРЖАНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСИНХРОННОЙ 24-ЧАСОВОЙ ОРБИТЕ | 2013 |
|
RU2535353C2 |
| СПОСОБ МОНИТОРИНГОВОЙ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2019 |
|
RU2721812C1 |
| СПОСОБ АВТОНОМНОЙ КОЛЛОКАЦИИ НА ОКОЛОСТАЦИОНАРНОЙ ОРБИТЕ | 2021 |
|
RU2768994C1 |
| СПОСОБ КОЛЛОКАЦИИ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2020 |
|
RU2729347C1 |
| СПОСОБ БАЛЛИСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ МОНИТОРИНГА КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ | 2022 |
|
RU2787796C1 |
| СПОСОБ КОЛЛОКАЦИИ ПРИ ПЕРЕВОДЕ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ДРУГУЮ ДОЛГОТУ СТОЯНИЯ И УВОДЕ ЕГО НА ОРБИТУ ЗАХОРОНЕНИЯ | 2022 |
|
RU2786680C1 |
Изобретение относится к космической технике и может быть использовано для автономной коллокации на геостационарной орбите. Переводят векторы наклонения и эксцентриситета на границы разнесенных относительно друг друга областей прицеливания, измеряют параметры орбиты каждого космического аппарата (КА), определяют текущие значения орбитальных параметров каждого КА, приводят КА с самоколлокацией (КАСК) в заданную область удержания по широте (наклонению) и долготе, выявляют стратегию управления движением центра масс смежного КА, уточняют положение центра области прицеливания по наклонению смежного КА, проводят коррекции наклонения вектора наклонения орбиты КАСК в фазовой плоскости с учетом сезона (текущего прямого восхождения Солнца), линии узлов орбиты смежного КА и центра, корректируют с помощью двигателей малой тяги период обращения, наклонения и эксцентриситета орбиты, или уклонения в случае опасного сближения КА. Изобретение позволяет исключить радиопомехи и обеспечивать коллокацию с помощью только центра управления КАСК. 4 ил.
Способ автономной коллокации на геостационарной орбите, включающий переводы векторов наклонения и эксцентриситета на границы разнесенных относительно друг друга областей прицеливания (областей допустимого изменения векторов наклонения и эксцентриситета), измерения параметров орбиты каждого космического аппарата (КА), определение по ним текущих значений орбитальных параметров каждого КА и проведение с помощью двигателей малой тяги коррекций периода обращения, наклонения и эксцентриситета орбиты, отличающийся тем, что за время до приведения КА с самоколлокацией (КАСК) в заданную область удержания по широте (наклонению) и долготе по данным независимых траекторных измерений выявляют стратегию управления движением центра масс смежного КА, в процессе удержания уточняют положение центра области прицеливания по наклонению смежного КА, проведением коррекций наклонения вектор наклонения орбиты КАСК в фазовой плоскости с учетом сезона (текущего прямого восхождения Солнца) выставляют так, чтобы линия узлов орбиты КАСК стала перпендикулярна линии узлов орбиты смежного КА и центр области прицеливания, включающей годограф вектора наклонения орбиты КАСК, смещают по перпендикуляру из начала координатной системы [ix;iy] относительно линии, соединяющей это начало с центром области прицеливания смежного КА, на величину расстояния между этим центром и началом координатной системы, проводят регулярные коррекции эксцентриситета для удаления направления на перигей от направления на восходящий узел орбиты КАСК на величину угла рассогласования между направлениями на перигей и восходящий узел орбиты смежного КА и поддержания такого положения перигея в заданных пределах области прицеливания по эксцентриситету, проводят регулярные коррекции наклонения орбиты КАСК, вызывающие, при поддержании прямого угла между линиями узлов орбит КА, следование конца вектора наклонения его годографу, на КАСК переопределяют центры областей прицеливания по наклонению и эксцентриситету орбиты КАСК при корректировке стратегии управления движением центра масс смежного КА и при нарастании угла рассогласования между линией апсид и линией узлов орбиты КАСК, в случаях опасного сближения КА проводят коррекции уклонения, представляющие собой одновременные коррекции долготы и эксцентриситета орбиты.
| СПОСОБ УДЕРЖАНИЯ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННОЙ ОРБИТАЛЬНОЙ ПОЗИЦИИ | 2011 |
|
RU2481249C2 |
| СПОСОБ УПРАВЛЕНИЯ КЛАСТЕРОМ НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ СПУТНИКОВ (ВАРИАНТЫ) | 2004 |
|
RU2284950C2 |
| US 20130062471 A1, 14.03.2013 | |||
| EP 780297 B1, 14.11.2001 | |||

